A Simple, Semi-Automated, Gravimetric Method to Simulate Drought Stress on Plants
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
agronomy
Article
A Simple, Semi-Automated, Gravimetric Method to Simulate
Drought Stress on Plants
Dilrukshi Kombala Liyanage, Ishan Chathuranga, Boyd A. Mori and Malinda S. Thilakarathna *
Department of Agricultural, Food and Nutritional Science, University of Alberta, Edmonton,
AB T6G 2P5, Canada; kombalal@ualberta.ca (D.K.L.); malagala@ualberta.ca (I.C.); bmori@ualberta.ca (B.A.M.)
* Correspondence: thilakar@ualberta.ca
Abstract: Drought is a major constraint of global crop production. Given that drought-induced crop
losses can threaten world food security, it has been and continues to be the focus of a large body of
interdisciplinary research. Most drought experiments are conducted under controlled environmental
conditions, where maintaining accurate soil moisture content is critical. In this study, we developed a
simple, Arduino microcontroller-based, semi-automated, lysimeter that uses the gravimetric method
to adjust soil moisture content in pot experiments. This method employs an Arduino microcontroller
interfaced with a balance as part of a portable lysimeter and irrigation system which can weigh and
record the mass of plants growing in pots, determine water loss due to evapotranspiration, and
adjust soil moisture automatically to a desired relative soil water content. The system was validated
with a greenhouse pot experiment using a panel of 50 early-maturity Canadian soybean varieties.
Drought was induced in the experiment by adjusting soil moisture content to 30% field capacity
while maintaining control pots at 80%. Throughout the experiment, the two moisture levels were
efficiently maintained using the Arduino-based lysimeter. Plant physiological responses confirmed
that plants in the drought treatment were under physiological stress. This semi-automated lysimeter
is low-cost, portable, and easy to handle, which allows for high-throughput screening.
Citation: Liyanage, D.K.;
Chathuranga, I.; Mori, B.A.; Keywords: drought; soil moisture; lysimeter; field capacity; Arduino microcontroller; moisture
Thilakarathna, M.S. A Simple, adjustment; water deficit
Semi-Automated, Gravimetric
Method to Simulate Drought Stress
on Plants. Agronomy 2022, 12, 349.
https://doi.org/10.3390/ 1. Introduction
agronomy12020349
Drought is the foremost abiotic stress that reduces plant growth and crop production
Academic Editor: Roberto Barbato throughout the world [1,2]. As the world population is predicted to surpass 9.5 billion [3]
Received: 24 November 2021
and drought risk and severity are predicted to increase due to climate change [4], future
Accepted: 27 January 2022
global crop production will be under significant pressure to keep pace with food demand.
Published: 29 January 2022
To supply this demand, research on drought stress is needed to improve crop resiliency
and increase food production.
Publisher’s Note: MDPI stays neutral
A wide variety of interdisciplinary studies have shown that plants exhibit a vast array
with regard to jurisdictional claims in
of mechanisms to tolerate drought stress [5–11]. However, to study these mechanisms it is
published maps and institutional affil-
crucial to accurately maintain soil moisture content [12]. As it is challenging to maintain
iations.
precise soil moisture in the field, most drought experiments are conducted under controlled
environmental conditions. Small pot or tube-based laboratory experiments are commonly
used to explore plant drought stress [13–17] and numerous methods were developed
Copyright: © 2022 by the authors.
to adjust soil moisture content including dual-probe heat pulse, electromagnetic (e.g.,
Licensee MDPI, Basel, Switzerland. time-domain reflectometry (TDR) and time-domain transmission (TDT) techniques) and
This article is an open access article gravimetric methods [18–25]. However, the most popular, direct, and accurate method
distributed under the terms and used to measure soil moisture content is the gravimetric method [24,26]. The usage of other
conditions of the Creative Commons indirect methods for measuring soil moisture content depends on accuracy, cost, response
Attribution (CC BY) license (https:// time, ease of installation, and durability of the instruments [26].
creativecommons.org/licenses/by/ Gravimetric-based soil moisture content is the ratio of the mass of the moisture present
4.0/). in a soil sample to the dried soil sample mass [26]. Gravimetric methods are usually more
Agronomy 2022, 12, 349. https://doi.org/10.3390/agronomy12020349 https://www.mdpi.com/journal/agronomy
Agronomy 2022, 12, 349 2 of 13
time-consuming and labor-intensive than other methods, but there is no need for expensive
equipment [24], and drawbacks can be reduced by integrating computer-based automation
techniques along with computational methods [21,27]. Gravimetric-based methods are used
to measure evapotranspiration in pot experiments and to adjust soil moisture content to
target levels [21,27–31]. These methods involve frequently measuring the mass of pots and
replacing transpired water to maintain a targeted soil moisture content [21,23,31]. However,
the higher cost and complexity of the previous computer-based automated systems have
limited their wider use for adjusting soil moisture levels in pot-based experiments.
Here, we developed a simple, low-cost, Arduino microcontroller-based lysimeter to
gravimetrically adjust soil moisture content in pot experiments without the need for special-
ized facilities or equipment. The system measures soil moisture deficit and automatically
adjusts the soil moisture content to a targeted level. We then demonstrated the effectiveness
of this system with a drought experiment using a panel of 50 early-maturity Canadian
soybean varieties. Ultimately, this system will reduce costs and help researchers efficiently
conduct drought-related experiments.
2. Materials and Methods
2.1. Lysimeter System
2.1.1. Design and Components
In this system (Figures 1 and 2; Table 1), water loss due to transpiration and evapo-
ration in each pot is determined and recorded based on mass, and soil moisture content
automatically adjusted to a targeted moisture level. A balance was made with two load cells
(20 kg HX711AD pressure sensor modules; SZYT, Shenzhen, China) attached to a 10 cm
diameter plastic tray, which served as a platform to place pots A and Figure 2A). Two load
cell amplifiers (HX711 load cell amplifiers; SZYT, Shenzhen, China), one per load cell, were
used to amplify the signal generated from the load cells (Figure 2B). A standard breadboard
(MT Technology Co., Ltd., Shenzhen, China) (Figure 2C) was used to connect the load
cell amplifiers, a 1-channel 5 V relay module, and an Arduino R3 USB microcontroller
(Arduino, A000066; Arduino SRL, Torino, Italy) (Figure 2D) which was used to control
the irrigation system. The 1-channel 5 V relay module was used to connect the Arduino
to the submersible water pump (ultra-quiet, 12 V, 4.2 W; ANSELF, Shenzhen, China) and
power supply (1 A 12 V DC power adaptor with US plug type; ELECAPITAL, Shenzhen,
China). Following the signal given by the Arduino, the relay (Figure 2E) connects or breaks
the circuit, which turns on or turns off the water pump, respectively. A compact wire
wiring connector (VENSTPOW, Shenzhen, China) was used to connect the submersible
water pump and the power supply. This compact wire wiring connector was used to avoid
manual soldering. The wiring diagram of the lysimeter system is illustrated in Figure 2.
The submersible water pump (Figure 2H) was placed in a reservoir and pumped water via
a flexible silicone hose (8 mm diameter; UXCELL, Shenzhen, China) (Figure 1D) to the pot
following the signal given by the Arduino. A ring stand with a burette holder was used to
direct the hose to the pot (Figure 1E). To avoid water damage, the Arduino, breadboard,
and relay were placed in a water-resistant plastic container (Figure 1B). The system was
connected via a USB cable (YCDC, Shenzhen, China) (Figure 1F) from the Arduino to
a laptop computer (Figure 1C) to record the respective pot identification numbers and
weights. For easy mobility, the entire system can be placed on a trolley and moved between
locations within and between greenhouses (Figure 1). All components including their
specifications and sources are listed in Table 1 and Supplementary File S1, respectively.
Agronomy 2022, 12, x FOR PEER REVIEW 3 of 13
Agronomy 2022, 12, 349 3 of 13
Agronomy 2022, 12, x FOR PEER REVIEW 3 of 13
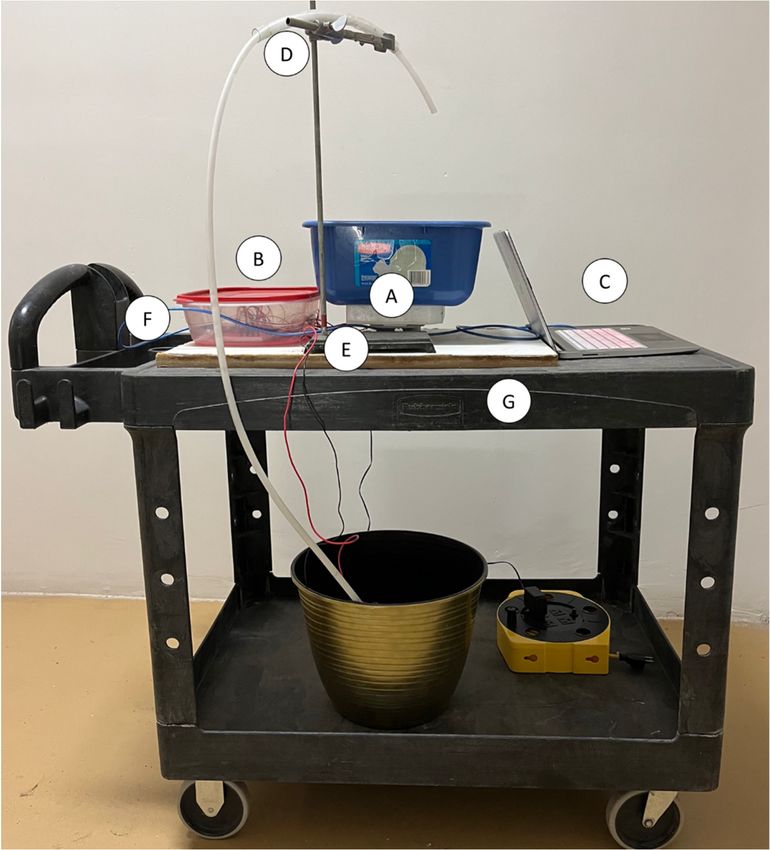
Figure 1. Arduino-based lysimeter. (A) Load cell and the pot holding tray, (B) Plastic water-resistant
Figure 1. Arduino-based
Figure 1. Arduino-based lysimeter.
lysimeter. (A)
(A) Load
Load cell
cell and
and the pot holding tray,
tray, (B)
(B) Plastic water-resistant
water-resistant
container holding the circuitry, (C) Laptop computer, (D) Hose from water reservoir, (E) Ring stand
container
container holding
holding the
the circuitry,
circuitry, (C)
(C) Laptop
Laptop computer,
computer, (D)
(D) Hose
Hose from
from water
water
with burette holder, (F) USB cable to connect the system to the laptop, (G) trolley.
reservoir,
reservoir, (E) Ring
(E) Ring stand
stand
withburette
with buretteholder,
holder,(F)
(F)USB
USBcable
cabletotoconnect
connectthe
thesystem
systemtotothe
thelaptop,
laptop,(G)
(G)trolley.
trolley.
Figure 2. Wiring diagram of the Arduino-based lysimeter. (A) Two 20 kg load cells, (B) HX711 load
cell amplifier, (C) Breadboard, (D) Arduino Uno microcontroller board, (E) One channel 5 V relay,
(F) Compact wire wiring connector with lever, (G) 12 V DC power supply, (H) Submersible water
pump (quiet,
Figure
Figure 2. 12 V,diagram
2. Wiring
Wiring 4.2 W). of
diagram of the
the Arduino-based
Arduino-based lysimeter.
lysimeter. (A)
(A) Two
Two20 20kg
kgload
loadcells,
cells, (B)
(B) HX711
HX711 load
load
cell amplifier,
cell amplifier, (C)
(C) Breadboard,
Breadboard, (D)
(D) Arduino
Arduino Uno
Uno microcontroller
microcontroller board, (E) One channel 5 V relay,
(F) Compact
(F) Compact wire
wire wiring
wiring connector
connector with
with lever,
lever, (G)
(G) 12
12 V
V DC
DC power
power supply,
supply, (H)
(H)Submersible
Submersible water
water
pump (quiet, 12 V, 4.2
pump (quiet, 12 V, 4.2 W). W).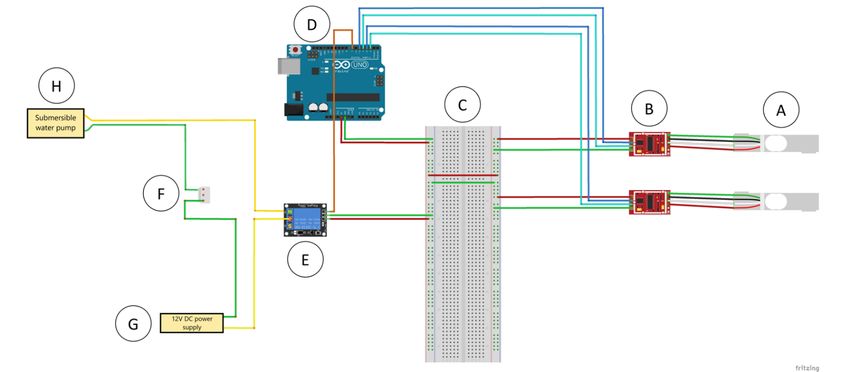
Table 1. Lysimeter components and specifications.
Agronomy 2022, 12, x FOR PEER REVIEW 4 of 1
Agronomy2022,
Agronomy 2022,12,
12,x xFOR
FORPEER
PEERREVIEW
REVIEW 4 4ofof1313
Table 1. Lysimeter components and specifications. Number of
Component Component Image Specifications
Units Required
Agronomy 2022, 12, 349 Number
4 of 13 of
Component Component
Table
Table
Image components
1.Lysimeter
Lysimeter components and Microcontroller:
Specifications
specifications. ATmega328
Table 1.1.Lysimeter andspecifications.
components and specifications. Units Required
Operating Voltage: 5 V
Microcontroller: ATmega328 Numberof
Number Number
of of
Component
Component
Component Component
Component
Component Image
Image
Image Input Voltage (recommended): 7–12 V
Specifications
Specifications
Specifications
Table 1. Lysimeter components and specifications. Operating Voltage: 5 V Units Required
UnitsRequired
Units Required
Input Voltage (limits): 6–20 V
Input Voltage
Microcontroller: (recommended):
Microcontroller:
Microcontroller: ATmega328
ATmega328 ATmega3287–12 V
Component Component Image Digital I/O Pins:
Specifications 14 Number of Units Required
InputOperating
Voltage
OperatingOperating Voltage:
(limits):
Voltage: 5 V
5 V 6–205 V
Voltage: V
Input (of which
Voltage 6 provide
(recommended): PWM output)
7–12
Input Voltage
Input (recommended):
Digital
Voltage I/O Pins: 147–12
(recommended): VV 7–12 V
Arduino Uno R3 Input
Input Analog
Microcontroller:
Voltage
Voltage Input6–20
ATmega328
(limits):
(limits): Pins:
6–20 V V6
(of which
Input
Operating 6Voltage:
provide
Voltage 5 V PWM
(limits): output)
6–20 V 1
USB Microcontroller DC
Input Voltage
Current
Digital
Digital I/O per
Pins:
I/O Pins:7–12
(recommended):
I/O 14
14 V Pin: 40 mA
Arduino Uno R3 Analog Digital Input I/O Pins: 6 14
V Pins:
(of
(of DCVoltage
Input
which
which Current (limits):
66provide
provide for6–203.3
PWM
PWM Voutput)
Pin: 50 mA
output) 1
USB Microcontroller
ArduinoUno UnoR3 R3
DC Current
Digital
(of which
Analog
I/O 6per
Pins: 14I/O
provide
Input
Pin:
Pins: PWM
6
40 mAoutput)
Arduino (of Flash
which 6 Memory:
Analog
provide PWM32
Input KB6(ATmega328)
Pins:
output)
Arduino Uno R3 DC Current
Analog Analog
Input for
Pins: 3.3 V Pin:
6Input 50 mA
Pins: 6 11
USB
Arduino Uno USB Microcontroller
Microcontroller ofDCDCCurrent
Current per
per I/O
I/O Pin:
Pin: 40
40 mA
mA
DCwhich 0.5 KB used by the bootloader
R3 USB Microcontroller 1 1
Current per I/O Pin: 40 mA
USB Microcontroller Flash
DC
DCDC Memory:
DC
Current
Current
Current Current
for for
3.3forV2
32
3.3
3.3
Pin:VKB
per
V (ATmega328)
I/O
Pin:
50Pin:
mA 50
50 Pin:
mA40 mA
mA
SRAM: KB (ATmega328)
ofFlash
which
Flash 0.5
Memory:
DC KB 32used
32 KB32
Current by
(ATmega328) the bootloader
1 for 3.3 V Pin: 50 mA
Flash Memory:
Memory: KBKB(ATmega328)
(ATmega328)
of which 0.5EEPROM:
KB used by the KB (ATmega328)
bootloader
ofofwhich
which SRAM:
Flash
SRAM: 0.5
0.5 2used
Memory:
2KBKB KB by
KB(ATmega328)
used (ATmega328)
by32 the
the KB bootloader
(ATmega328)
bootloader
EEPROM: Clock
1 KB Speed: 16 MHz
(ATmega328)
SRAM:
ofEEPROM:
SRAM:
which 2KB
20.5 KB116KB
KB (ATmega328)
(ATmega328)
(ATmega328)
used by the bootloader
Clock Speed: MHz
EEPROM:
EEPROM: Clock
SRAM: 1 1 KBKB
Speed: (ATmega328)
(ATmega328)
2 KB 16 MHz
(ATmega328)
ClockSpeed:
Clock Ultra-quiet
Speed: 16MHz
MHz
EEPROM: 116KB (ATmega328)
DC12 V 4.2 W
Clock
Ultra-quietSpeed: 16 MHz
Submersible water Power: Electric
Ultra-quiet
Ultra-quiet
DC12VV4.24.2
Ultra-quiet W 1
pump DC12
Pressure:
DC12
DC12 V 4.2VW4.2 LowWW Pressure
Submersible waterwater
Submersible
Submersible Power:
Power: Electric
Ultra-quiet
Electric
water pump water Power: Electric
Power:
Structure: ElectricSubmersible Pump 1
Submersible 1 11
pump pump
pump Pressure:
Pressure:
Pressure:
Pressure:
Low DC12
Low
Low Low
Pressure Pressure
V 4.2
Pressure
Pressure W
Theory: BrushlessPump
Structure: Submersible Submersible pump
Submersible water Structure:
Structure:
Structure:
Theory: Submersible
Power: pump
Submersible
BrushlessSubmersible
Submersible Electric Pump
Pump
Pump
Theory:Brushless
Brushless Submersible pump
1
pump Theory:
Theory: Brushless
Pressure: Submersible
Submersible
Low Pressure pump pump
Structure: Submersible Pump
Theory: Brushless Submersible pump
1A
Power Adaptor Output
1A 11A A Voltage: 12 V 1
PowerAdaptor
Adaptor Output 112AV 12 V
Voltage:
PowerPower
Adaptor Output
OutputVoltage:
Voltage:
Plug Type: 12 V
US Plug 1 11
Power Adaptor Plug Type: USVoltage:
Output Plug 12 V 1
PlugType:
Plug Type:US USPlug
Plug
Plug Type: US 1 APlug
Power Adaptor Output Voltage: 12 V 1
Plug Type: US Plug
Relay Module for
Relay
Relay
Relay Module Modulefor
Module
for Arduino for 1 Channel
11Channel
Channel
1 Channel
1
5V 11 1
Arduino
Arduino
Arduino 55VV 5 V
Relay Module for 1 Channel
1
Arduino 5V
Relay Module for 1 Channel
1
Arduino 5V
Material:Silicon
Material: Silicon
Material:Material:
Silicon Silicon
Main
Main
Main Color:
Color:
Color: Clear
ClearClear
Inner DiaMain
Inner
Inner Dia(ID):
(ID):
Dia
Color:
8(ID):
mm 88mmmm Clear
FlexibleFlexible
Hose
Flexible Hose Material: Silicon 1
11
Agronomy 2022,Hose
12, x FOR PEER REVIEW Outer Dia
Outer
Outer
(OD): 10
Inner
Dia(OD):
Dia Dia
(OD):
mm;(ID):
1010mm;
mm;8 mm 5 of 13
Flexible Hose Wall Main
Thickness: Color:
1.2 mm Clear 1
Wall Outer
WallThickness: Dia
Thickness:1.2
Length: 1 m (OD): mm mm;
1.2mm 10
Inner Material:
Dia (ID): 8Silicon
mm
Flexible Hose Wall Thickness:
Length:
Length: 11mm 1.2 mm 1
Outer Dia Main (OD):
Color:10 Clear
mm;
Model Number: Length:
222–4121413m 415
Wall Inner
Thickness: 1.2 mm
Flexible Hose Material of Insulation: 8 mm
Dia (ID):
1
Model Number: Length:
Outer
modified
222–412
Dia413
nylon 1415
m 10 mm;
(OD):
(PA66)
Material of Insulation:
Contact Wall
nylonThickness:
material:
modified 1.2 mm
phosphor copper
(PA66)
Compact Wire Contact material: phosphor copper 2
Compact Wire Wiring Connector Wire Cross section: Length:
0.08~2.5 1
2 mm m
Wire Cross section: 0.08~2.5 mm (single (single
Wiring Connector
with lever hardwire), 0.08~4 mm2mm (multi soft wire)
1 1
hardwire), 0.08~4 2 (multi soft wire)
with lever Rated Current: 32 A
Rated Current:
Rated power: 7 KW 32 A
Gauge:
Rated 28~12 AWG 7 KW
power:
Strip length: 9–10 mm
Gauge: 28~12 AWG
Strip length: 9–10 mm
Compact Wire
Agronomy 2022, 12, x FOR PEER REVIEW modified
modified
Material nylon
ofnylon (PA66)
(PA66)
Insulation:
5 of 13
Wire Cross section: 0.08~2.5 mm2 (single
Wiring Connector 1
Compact
Compact Wire
Wire hardwire), 0.08~4 mm (multicopper
Contact
Contact material:
material:
modified phosphor
phosphor
nylon 2 (PA66) copper
soft wire)
with lever Wire
Wire Cross
Cross
Contact section:
section:
material: 0.08~2.5
0.08~2.5
phosphor mm
mm 2 2(single
copper(single
Wiring
Wiring Connector
Connector
Compact Wire Rated Current:
Model Number: 222–412 413 32
415 A 11
hardwire),
hardwire),
Wire 0.08~4
0.08~4
Cross Rated
section: mmmm 2 2(multi soft
(multi
0.08~2.5
power: 7 KWmmsoft wire)
wire)
2 (single
with
Wiring with lever
lever
Connector Material of Insulation: 1
hardwire), Rated
modifiedRated
0.08~4 Current:
Current:
mm 32
28~12(multi
nylon (PA66)
Gauge: 2 32 AA
AWGsoft wire)
Agronomy 2022, 12, 349 5 of 13
with lever Rated power: 7732
KW
Compact Wire
Rated
Rated
Contact material:
Strip power:
Current:
phosphor
length: copper
9–10 KWA
mm
Gauge:
Wire Cross section:
Gauge:
Rated 28~12
0.08~2.5 mmAWG
28~12
power:
2 (single
7AWG
KW
Wiring Connector 1
hardwire), 0.08~4 mm
Strip 2 (multi soft wire)
length: 9–10 mm
with lever Table 1. Cont. Strip
Gauge: length:
28~12 9–10
AWG mm
Rated Current: 32 A
Strip length: 9–10 mm
Rated power: 7 KW
Component Component Image Specifications Number of Units Required
Gauge: 28~12 AWG
Transparent Box Material: Acrylic
Strip length: 9–10 mm
Case Shell for Locking mechanism: Screwless locking 1
Transparent
Transparent
Arduino UNO Box
BoxR3 Material:
Material:
Color: Acrylic
Acrylic
Transparent
Case Shell for
Case Shell Box
Transparent for Locking
Locking mechanism:
mechanism:
Material: Screwless
Screwlesslocking
Acrylic locking 11
Material: Acrylic
Arduino
Transparent
Case UNO
Box Case
Arduino Shell forR3
Shell for
UNO R3 Locking
Locking Color:
Color:
mechanism:
mechanism: Transparent
Transparent
Screwless Screwless
locking locking 1 1
Arduino UNO R3
Transparent Box Material: Acrylic
Color: Transparent
Arduino UNO
Case ShellR3 for Color:Screwless
Locking mechanism: Transparent
locking 1
Arduino UNO R3 Color: Transparent
Material: Metal and environmental PVC
Connectors: 4-pin USB type A (male) to 4-
Material:
Material:Metal Metal
pin USB andand environmental
type B (male) PVC
environmental PVC
Connectors:
Connectors:
Material:
Shield: Metal 4-pin
Metal4-pin
wovenandUSBUSB type
type
environmental
mesh A aluminumto4-
A (male)
(male) to
PVC 4-
Material:
Material: Metal
Metal and
andenvironmental
environmental PVC+PVC foil
USB cable Connectors:
Connectors: pin
pin
4-pin USB
USB
4-pin
USB type type
USB
Atype B B
type
(male) (male)
to (male)
Ato480
(male) to 4- 1
Connectors:Transmission
4-pin
4-pin USBBtype
USB type
Rate:
(male)
Up to
A (male) 4- Mbps
Shield:
Shield:
Shield: Metal
pin
Metal pinwoven
Metal
USB
woven woven
USB
type
Approval:
mesh + typemesh
mesh
B aluminum
(male) BRoHS+foil
+aluminum
(male) aluminumfoil foil
USB
USB cablecable
USB cable 1 11
Shield: Transmission
Transmission
Shield:
Metal Metal Rate: Up Rate:
Transmission
woven woven
Color:mesh +meshUp
to 480 Mbps
Rate: Up
aluminum
Black, light blue to
+ to 480
480
aluminum
foilMbps
Mbps foil
USB cable Approval: RoHS 1
USB cable Transmission Approval:
Rate: Up to 480 RoHSMbps 1
Color: Black,
Transmission Approval:
light
Length: blue
Rate: Up RoHS to 480 Mbps
Length: 1 m/3.28
Approval: RoHS ft 1 m/3.28 ft
Color:
Color: Black,
Approval:Black, RoHSlight
lightblue blue
Color: Black, light blue
Length:
Length:
Color: Black, 11m/3.28
m/3.28
light ftft
blue
20 kg pressure Length: 1 m/3.28 20 ftkg
sensor + HX711AD Length:
Tray 1 m/3.28
diameter 10 ftcm
2020kg pressure
kg20pressure
kg pressure 20 kg 20 20 kgkg 2
module weighing Operating
20 kg voltage DC 5 V
sensor
sensor
20 kg pressure +
sensorHX711AD
sensor
20 kg +scale + HX711AD
HX711AD
pressure
+ HX711AD Tray
Tray Tray
Traydiameter
diameter
diameter
HX711AD 10 kg
diameter
10 20
cm
(24-bit 1010cm
cm conversion) cm
module weighing scale Operating voltage DCDC 5V 5V
2 22
module
module
sensor module weighing
weighing
weighing
+ HX711AD Operating
Operatingvoltage
Operating
Tray voltage
diameter voltage 10DC cm55VV
DC
HX711AD (24-bit conversion)
scale scale HX711ADHX711AD (24-bit(24-bit
conversion) conversion) 2
module scale
weighing 400 tie HX711AD
Operating
points (24-bit
in total, voltage 100 conversion)
DC
in 2 5power
V rails,
scale 400 tie pointsHX711AD
in 300
total,in100 (24-bit
a 30
in 2×powerconversion)
10 matrix
rails,
Solderless 400
400 tie tie
400 tiepoints
300points
points
Transparent in
intotal,
inin
100 total,
plastic,
a 30 × 10 total,
in 100
2 power
with
matrix 100 inin22power
rails,
black power rails,
legend. rails,
Col-
300 in a 30 × 10 matrix 1
Solderless
Breadboard 400
Transparenttie 300
points300
plastic, in
inin
with
Transparent plastic,ored
a a30
total,30
black
with black
×
power ×10
100 10 matrix
in
legend.
legend. matrix
rails 2 power
Col- rails,
Solderless Breadboard 1
Solderless
Breadboard
Solderless Transparent
TransparentColored
ored
300
For plastic,
power rails
power
plastic,
in
wiresa 30 with
rails
21with
× 10
to black
black
matrix
26 AWG legend.
legend.Col-
Col-
For wires 21 to 26 AWG 11
Breadboard
Breadboard For wires 21
ored
oredto power
26power
AWG rails
rails legend.
Solderless Transparent
2-sided plastic,
peelable
2-sided adhesive
peelable with
tape black
adhesive tape Col-
2-sided peelable
For wires adhesive
2121toto26 tape 1
Breadboard Fororedwires power 26AWG
rails AWG
2-sided
2-sided peelable
For wirespeelable 21 to adhesive
adhesive
26 AWG tape
tape
2-sided peelable adhesive tape
Dupont
Dupont Jumper
Jumper Length:Length:
30 cm 30 cm
Length: 30 cm 11
Dupont Jumper Wire
Wire Package: 20wires
Package: 20 wiresperper each
each category
category 1
Agronomy Wire
2022, 12, x FOR PEER REVIEW Package: 20 wires per each category 6 of 13
Dupont
Dupont
Agronomy Jumper
Jumper
2022, 12, x FOR PEER REVIEW Length:
Length:3030cm
cm 6 of 13
11
DupontWire
Wire
Jumper Package:
Package:2020
wires
wiresper
Length: each
eachcategory
percm
30 category
1
Wire Package: 20 wires per each category
Material: Hard Plastic
Material: Hard Plastic
Lab Trolly Material:Functions:
Hard Plastic portable 1
Lab
Lab Trolly
Trolly Functions:
Functions: portable portable 1 1
Weight:
Weight: Lightweight
Lightweight
Weight: Lightweight
Burette
Burette holder/clamp
Material:Material:
Metal Metal 1
Burette Material:
Functions: Fully adjustableMetal 1
holder/clamp Functions: Fully adjustable 1
holder/clamp Functions: Fully adjustable
Burette Material: Metal
1
holder/clamp Functions: Fully adjustable
Agronomy 2022, 12, 349 6 of 13
Burette
Burette Material:Metal
Material: Metal
holder/clamp Functions:Fully
Fullyadjustable
adjustable 11
holder/clamp Functions:
Table 1. Cont.
Component Component Image Specifications Number of Units Required
Operating system:
Laptop 1
Windows/Apple operating systems
Operatingsystem:
Operating system:
Laptop
Laptop
Laptop
Operating system:
1 11
Windows/Apple operating
Windows/Apple operating systems
Windows/Apple operating systems systems
Power extension
Length: As per your requirement 1
code
Power
Power extension
extension
Power extension code Length:
Length: As requirement
As per your per your
requirement
Length: As per your requirement
1
11
code
code
Water reservoir Any
Any plastic
plastic container
container to hold
sufficient 1
to hold sufficient
Water reservoir amount of water 1
amount of water
Anyplastic
Any plasticcontainer
containertotohold
holdsufficient
sufficient
Waterreservoir
Water reservoir 11
amountofofwater
amount water
2.1.2. Software and Code
To set up the system, Arduino IDE (https://www.arduino.cc/en/Guide/Windows,
2.1.2. Software and Code
accessed on 21 November 2021) and PuTTy (https://www.putty.org/, accessed on 21
November 2021) To setwere up the system,
installed onArduino
a laptopIDE (https://www.arduino.cc/en/Guide/Windows,
computer. PuTTy is used as the console as it ac-
2.1.2.Software
cessed
has the 2.1.2. Software
capabilityon of andCode
21recording
November
and Code
the2021) and PuTTy
data from (https://www.putty.org/,
the Arduino directly into a text (.txt) accessed on 21 No-
file. Data
can alsovember Toset
be saved
To set
2021)
toupup
thethe
were
the system,
cloud installed
system, Arduino
on a laptop
by configuring
Arduino IDE
IDE (https://www.arduino.cc/en/Guide/Windows,
computer.
PuTTy if needed. PuTTy is used as the console as it has
(https://www.arduino.cc/en/Guide/Windows, ac-
ac-
The cessed
the
Arduino
cessed on
capability
on 21 21
Uno November
of recording
board was
November 2021)
the
coded
2021) and
data
andusing PuTTy
from
PuTTy the
C++. (https://www.putty.org/,
Arduino directly into
A specific algorithm accessed
(https://www.putty.org/, a accessed
text (.txt)
was created on
file.21
on 21 No- No-
Data
vember
can
to carryvember
out also 2021)
be
the2021) were installed on a laptop computer. PuTTy is used as the console asasitithas
moisture were
saved to installed
the cloud
adjustment. on
by
Thea laptop
configuringcomputer.
HX711_ADC PuTTy PuTTy
if
library is
needed.
was used as
withthe console
the algo- has
the
rithm tothe capability
calibrate
capability andofof
The Arduino recording
Uno board
measure
recording the
weight
the wasdata
data
data from
coded
from
from the
using
the the Arduino
C++. cells.
load
Arduino directly
Adirectly
specific intoaatext
algorithm
The into
given text(.txt)
(.txt)created
was
calibration file.Data
file. Data
to
example can
carry
code also
out
was be
the saved
moisture
used to to the
find cloud
adjustment.
the by configuring
calibrationThe HX711_ADC
values
can also be saved to the cloud by configuring PuTTy if needed. PuTTy
of the if
loadneeded.
library was
cells, used
and with
those the
values algorithm
were included The
to calibrate
The Arduino
and
inArduino
the main Uno
measure
Uno board
weight
algorithm
board was
at data
was thecoded
codedfrom
codingusing
the
using stage C++.
load
C++. AAspecific
cells.specific
The given
(Supplementary algorithm wasAs
calibration
File
algorithm S2).
was created
example
created toto
carry
this system
code out
consisted
was the
used moisture
of
to two
find adjustment.
load
the cells, the
calibration The
pot HX711_ADC
weight
values of was
the library
load was
determined
carry out the moisture adjustment. The HX711_ADC library was used with the algorithm cells, and used
by with
adding
those the
valuesthe algorithm
were in-
two load tocell
calibrate
cluded
to readings.
in the
calibrate and
main
and measure
Before
algorithm
measure weight
starting
weightatthe
thedata
data fromstage
watering
coding
from the
the load
process, cells.
(Supplementary
load cells. Thegiven
the user
The given
should calibration
upload
Filecalibration example
theexample
S2). As this system
algorithm to the
code was Arduino
used to by selecting
find the the correct
calibration codeof
values and the pressing
load theand
cells, upload
those button
values in were in-
code was used to find the calibration values of the load cells, and those values were in-
the software.
cluded After uploading it once, the Arduino will keep the algorithm File in its memory
cluded ininthethe mainalgorithm
main algorithm atatthe
the codingstage
coding stage (Supplementary
(Supplementary S2).
File S2). Asthis
As thissystem
system
for all the other trials. The relevant C++ codes are listed in Supplementary File S2 and
GitHub (https://github.com/IshanChathuranga/Arduino-Irrigation-system-for-plant-
moisture-management-researchers, accessed on 21 November 2021).
2.2. Operating the Lysimeter System
2.2.1. Determining Soil Water Holding Capacity
Before experiments begin, soil water holding capacity needs to be determined. Here,
we used field capacity as a proxy for soil water holding capacity. Field capacity is defined
as the amount of soil moisture or water content retained in the soil when all excess water
has drained away [32]. For this experiment, 6.52 L plastic pots were filled with a mixture
of sand (QUIKRETE® Premium Play Sand, QUIKRETE, Atlanta, GA, USA) and growing
mix (Sunshine Mix #4 Gro Professional, SunGro, Vancouver, BC, Canada) (1:3 volume
basis) until a final constant weight was reached (e.g., 4500 g). The bottom of each pot was
lined with a coffee filter (12” Mother Parkers Coffee Filters, Mother Parkers Tea and Coffee,
Agronomy 2022, 12, 349 7 of 13
Mississauga, ON, Canada) to prevent soil loss. The initial weight of the dry soil (Dw ) was
measured after drying the soil in an oven at 80 ◦ C until a constant weight was reached [21].
The pots were watered slowly until the soil was saturated and water drained out from the
holes in the bottom. The top of the pots was covered with aluminum foil and then kept
for 24 h until water no longer drained from the bottom. The final saturated weights of
the pots were recorded (Sw ). Field capacity was calculated as FC = Sw − Dw . From here,
treatment weights can be calculated for a well-watered (W) and a drought (D) treatment.
These treatment values (W, D) are then supplied to the algorithm using the Arduino IDE
prior to the start of the experiment.
2.2.2. Applying Soil Water Treatments
To initiate the process, the correct Arduino code file (Supplementary File S2) has
to be opened using the Arduino IDE (integrated development environment). Once the
upload button is pressed in the Arduino IDE, it will upload the algorithm to the Arduino
board. Then the plastic tray has to be placed on the load cells and the PuTTy console
software opened on the laptop. This will run the algorithm on the Arduino Board and
will open a monitor on the laptop screen which will be used to show the outputs and
to send the input values to the Arduino board, also a pre-saved data entry text (.txt) file
(Supplementary File S3) is opened in the laptop. The algorithm will then initiate the load
cells and tare the reading with the weight of the tray. Once this operation is completed,
the system will consider the weight of the tray as zero or the tare point and will ask the
user to place the first pot on the tray. Once the pot is on the tray, the algorithm will start
monitoring the weight readings of the load cells and will identify the peak value readings
by determining the point at which the load cell readings will increase and, subsequently,
slightly decrease. A minimum threshold weight value was included in the algorithm
to improve the accuracy of this operation. If the user accidentally touches the pot or
hits the trolley while keeping the pot on the tray, it may affect the load cells and cause
the algorithm to read an incorrect peak value. However, the threshold will prevent the
algorithm from reading such false peak values before it hits the actual peak weight. Once
the algorithm successfully determines the initial weight of the pot, it will ask the user to
enter the pot identification number on the laptop. The algorithm will identify whether
the user has started typing the number of the pot or not, and it will wait until the user
starts typing the pot number. For example, the pot number will denote as 010W4 or 010D4,
wherein the first three numbers represent the numerical number given to the pot and the
W or D character represents whether it is a well-watered or a drought conditioned pot,
respectively. The coding can be modified to assign more than two moisture treatments as
well (Supplementary File S4). Finally, the last number will represent the replicate number
of the pot. Once the pot identification number is typed on the laptop screen, the algorithm
will count the number of characters in the given pot number, then run a loop to search
whether there is W or D character in the pot number. The algorithm will identify both
capital and simple representations of W and D as valid characters. If it finds a W character,
then it will input the prescribed weight corresponding to a well-water conditioned pot in
the algorithm. Similarly, if the algorithm finds a D character, it will input the prescribed
weight corresponding to the specific drought condition pot in the algorithm. If more
than two treatments are needed, the algorithm is available in supplementary methods
(Supplementary File S4). Additionally, if the user mistakenly entered any other character
or forgot to enter any character in the pot number, the algorithm will show a notification to
check the pot number and will give space to re-enter it. This loop will run until the user
enters a valid pot number.
Once a valid number is entered, the algorithm will check whether the pot weight is
below the prescribed weight value (e.g., 5000 g for the well-watered condition and 3000 g
for the drought condition). If the weight is equal to or higher than the prescribed value, the
program will ask the user to remove the pot, and the data will be saved in a database. If
the weight of the pot is below the prescribed value, the program will switch on the water
Agronomy 2022, 12, 349 8 of 13
pump. The algorithm will continue monitoring the weight of the pot, where once the pot
weight reaches the prescribed value it will switch off the water pump. Once the water
pump is switched off, a portion of the residual water in the tube will fall into the pot, each
user must determine the weight of this residual water prior to using this system (e.g., We
measured this as 40 g) and update in the coding (Supplementary File S4). The program
will terminate the water pump as soon as the weight scale hits the value of the prescribed
weight minus the residual water weight (e.g., 40 g). The laptop display will show the initial
weight and the final weight of the pot, and the data will be saved in the text (.txt) file. It
is important to note that the weight of the residual water (e.g., 40 g) needs to be added to
the final weight as the software only records the weight before adding this residual water
to the pot. At the next step, the algorithm will ask the user to remove the pot and wait
until the system is ready for the next iteration. This step will take around 1–2 s. However,
if ≥100 g of water spilled on the tray in the previous iteration, the system will pause this
step until the tray is cleaned and placed on the load cells. If
Agronomy 2022, 12, 349 9 of 13
flux density of 500 µmol m–2 s−1 and CO2 concentration of 400 mol m–2 s−1 inside the
chamber were maintained. Data were collected on a single fully expanded young soybean
leaf on each plant in each treatment (n = 50 per treatment).
All statistical analyses were performed using GraphPad Prism Software (v9, Graph-
Pad Software, San Diego, CA, USA). We compared the leaf photosynthesis, stomatal
conductance, transpiration, and evapotranspiration between the drought and well-watered
treatments with paired t-tests.
3. Results and Discussion
The semi-automated lysimeter accurately maintained soil moisture levels in both the
80% and 30% FC treatments (Figures 3 and S1). Over the course of 3 weeks, pots were
weighed every 2–5 days depending on the rate of evapotranspiration, and soil moisture
content was adjusted back to the targeted FC levels (Figure 3) based on the pot weight
(Figure S2). The error variance under each irrigation event may be due to differences in
plant size, where the larger genotypes depleted soil water more quickly than the smaller
plants. Plants in the 30% FC treatment had significantly lower stomatal conductance
(Figure 4B), transpiration (Figure 4C), and evapotranspiration (Figure 4D). However, there
was no significant difference in leaf photosynthesis between the 30% and 80% FC treatments
(Figure 4A). Soybean plants’ response to drought stress in terms of leaf stomatal conduc-
tance, transpiration, and evapotranspiration is well studied and our results corroborate
previous findings [34–38]. Our results confirmed that the semi-automated lysimeter was
effective in inducing and maintaining drought and well-watered soil conditions. There-
Agronomy 2022, 12, x FOR PEER REVIEW
fore, this system could be applied to other studies aimed at examining plant responses to
different soil moisture levels.
Figure 3.3.Total
Figure potpot
Total weight and soil
weight andwater
soil content
water as a percentage
content of field capacity
as a percentage (FC) in
of field the well-(FC) in
capacity
watered (80% FC) and drought (30% FC) treatments over the soybean plant growth period
watered (80% FC) and drought (30% FC) treatments over the soybean plant growth period m measured
using the
using theArduino-based
Arduino-based lysimeter. The black
lysimeter. color represents
The black the 80% FC
color represents thetreatment
80% FC pot weights,pot weig
treatment
and the orange color represents the 30% FC pot weights. Data are means and ± range (n = 50).
the orange color represents the 30% FC pot weights. Data are means and ± range (n = 50).
Figure 3. Total pot weight and soil water content as a percentage of field capacity (FC) in the well-
watered (80% FC) and drought (30% FC) treatments over the soybean plant growth period measured
Agronomy 2022, 12, 349 using the Arduino-based lysimeter. The black color represents the 80% FC treatment pot weights,
10 ofand
13
the orange color represents the 30% FC pot weights. Data are means and ± range (n = 50).
Figure 4. Plant physiological parameters and evapotranspiration under drought (30% field capacity)
and well-watered (80% field capacity) conditions in soybean. (A) Leaf photosynthesis, (B) Stomatal
conductance, (C) Transpiration, (D) Evapotranspiration. Box plots show the median (horizontal line),
first and third quartiles (the lower and upper bounds respectively), and whiskers above and below
the box plot indicate the range. FC; field capacity. **** indicates p < 0.0001.
Mini-lysimeters are portable, accurate, and effective in measuring evapotranspiration
in pots [39,40]. Although other mini-lysimeters were developed to simulate drought
stress in pot-based experiments [21,27], this newly described system is more portable and
economical to build. All the components can be purchased for less than 200 USD and will
run with a standard laptop that most research groups already have. The data collected
can be automatically saved in the cloud, making it easier to handle and access. This semi-
automated system is very user-friendly and does not require high technical competence
to set up and operate. In the current experiment, it took ca. 1 min to complete a single
pot, which included the time to bring the pot to the lysimeter, enter the pot identification
number on the laptop, supply the water to the pot, and return the pot to the greenhouse
bench. This time will vary depending on different greenhouse arrangements but is quite
efficient. One limiting factor can be the time required to fill the reservoir when the water
level is low, but this can be overcome by using a larger reservoir and having a water supply
close at hand. On average, we were able to adjust the moisture content in 50 pots per hour,
so in 5 working hours in the greenhouse, ca. 250 pots can be adjusted. The current systemAgronomy 2022, 12, 349 11 of 13
was created to implement two treatments (well-watered and drought) only; however, we
supplied the necessary code (Supplementary File S4) to increase the number of treatments.
Users can set up any number of soil moisture treatments while using the Arduino RAM
memory efficiently.
There are some limitations associated with this Arduino-based lysimeter. This semi-
automated system is not fully water-resistant as its housing was made using a commonly
available plastic box. It will withstand small water splashes, but to make the system fully
water-resistant, a custom-made housing compartment with water barrier passages for
the wires to pass through could be made. Another alternative solution would be to use
two separate and independent systems for the weight measuring load cell section and
the data processing Arduino section. However, in this setup, power must be supplied
separately to the two units and wireless technology would be needed to transmit the weight
data to the Arduino circuitry. This would minimize the complexity of making the whole
system water-resistant; however, it would increase the complexity of the system as wireless
connectivity would be essential on both devices.
In the validation experiment, we did not consider the weight of the plants for adjusting
the FC as the plants grew over time. To make the FC values more accurate, extra pots of
plants can be grown and shoot biomass destructively measured at each water adjustment
period and added to the final target weight (e.g., 80% FC = 5363.4 g + shoot biomass;
30% FC = 4025.9 g + shoot biomass) [21]. In the future, it is possible to increase the
efficiency and functionality of this system. The laptop could be replaced with a small LCD
display and a wireless keyboard which could make the system more user-friendly (but
potentially increase the technical competence to set up the system). A barcode reader or
a QR code reader could also be attached to the system to identify the pot identification
numbers, improving the accuracy of the data collection and making the process more
efficient [41]. To make the system fully portable, the current wall power connector could be
replaced with a rechargeable battery module
4. Conclusions
Maintaining accurate soil moisture content is critical in drought experiments. This
semi-automated Arduino-based, lysimeter, irrigation system is an economical and high-
throughput system for moisture adjustment in pot experiments. It can be further developed
to minimize human errors and to reduce the cycle time, which will increase productivity.
Supplementary Materials: The following supporting information can be downloaded at: https:
//www.mdpi.com/article/10.3390/agronomy12020349/s1, Figure S1: Field capacity adjustment
in pots growing soybean plants using the semi-automated Arduino-based lysimeter,
Figure S2: Gravimetric moisture adjustment in pots growing soybean plants using the semi-automated
Arduino-based lysimeter, Supplementary File S1: Orginal source of different components of the irri-
gation system, Supplementary File S2: C++ Code for Arduino, Supplementary File S3: Weight data
recording .txt file, Supplementary File S4: C++ Code for Arduino with dynamic watering conditions,
Video S1: A video of the Arduino-based lysimeter system in operation.
Author Contributions: Conceptualization, D.K.L., I.C. and M.S.T.; methodology, D.K.L. and I.C.;
software, I.C.; validation, D.K.L. and I.C.; formal analysis, D.K.L. and I.C.; investigation, D.K.L.;
resources, M.S.T.; data curation, D.K.L.; writing—original draft preparation, D.K.L. and I.C.; writing—
review and editing, D.K.L., I.C., M.S.T. and B.A.M.; visualization, D.K.L., I.C. and M.S.T.; supervision,
M.S.T.; project administration, M.S.T.; funding acquisition, M.S.T. and B.A.M. All authors have read
and agreed to the published version of the manuscript.
Funding: This research was supported by a Natural Sciences and Engineering Research Council of
Canada (NSERC) Discovery Grant (RGPIN-2020-04425) to M.S.T. Financial support was provided to
B.A.M. by an NSERC Industrial Research Chair (Grant 545088) and partner organizations (Alberta
Wheat Commission, Alberta Barley Commission, Alberta Canola Producers Commission, Alberta
Pulse Growers Commission) during the preparation of the manuscript.Agronomy 2022, 12, 349 12 of 13
Data Availability Statement: The original contributions presented in the study are included in the
article/Supplementary Material, further inquiries can be directed to the corresponding author.
Acknowledgments: We thank Kelley Dunfield and Shay Missiaen (University of Alberta) for their
help with the greenhouse trial.
Conflicts of Interest: The authors declare that the research was conducted in the absence of any
commercial or financial relationships that could be construed as potential conflicts of interest.
References
1. Keyantash, J.; Dracup, J.A. The Quantification of Drought: An Evaluation of Drought Indices. Bull. Am. Meteorol. Soc. 2002, 83,
1167–1180. [CrossRef]
2. Bacelar, E.L.V.A.; Moutinho-Pereira, J.M.; Gonçalves, B.M.C.; Brito, C.V.Q.; Gomes-Laranjo, J.; Ferreira, H.M.F.; Correia, C.M.
Water Use Strategies of Plants under Drought Conditions. In Plant Responses to Drought Stress; Aroca, R., Ed.; Springer:
Berlin/Heidelberg, Germany, 2012; pp. 145–170, ISBN 9783642326530.
3. United Nations. Department of Economics and Social Affairs. 2019. Available online: https://www.un.org/development/desa/
en/news/population/world-population-prospects-2019.html.Html (accessed on 21 November 2021).
4. Sheffield, J.; Wood, E.F.; Roderick, M.L. Little Change in Global Drought over the Past 60 Years. Nature 2012, 491, 435–438.
[CrossRef] [PubMed]
5. Basu, S.; Ramegowda, V.; Kumar, A.; Pereira, A. Plant Adaptation to Drought Stress. F1000Research 2016, 5, 1554. [CrossRef]
[PubMed]
6. Wasaya, A.; Zhang, X.; Fang, Q.; Yan, Z. Root Phenotyping for Drought Tolerance: A Review. Agronomy 2018, 8, 241. [CrossRef]
7. Earl, H.J.; Davis, R.F. Effect of Drought Stress on Leaf and Whole Canopy Radiation Use Efficiency and Yield of Maize. Agron. J.
2003, 95, 688–696. [CrossRef]
8. Ganjeali, A.; Porsa, H.; Bagheri, A. Assessment of Iranian Chickpea (Cicer Arietinum L.) Germplasms for Drought Tolerance. Agric.
Water Manag. 2011, 98, 1477–1484. [CrossRef]
9. Janiak, A.; Kwaśniewski, M.; Szarejko, I. Gene Expression Regulation in Roots under Drought. J. Exp. Bot. 2016, 67, 1003–1014.
[CrossRef]
10. Jabbari, M.; Fakheri, B.A.; Aghnoum, R.; Nezhad, N.M.; Ataei, R. GWAS Analysis in Spring Barley (Hordeum Vulgare L.) for
Morphological Traits Exposed to Drought. PLoS ONE 2018, 13, e0204952. [CrossRef]
11. Tarawneh, R.A.; Alqudah, A.M.; Nagel, M.; Börner, A. Genome-Wide Association Mapping Reveals Putative Candidate Genes for
Drought Tolerance in Barley. Environ. Exp. Bot. 2020, 180, 104237. [CrossRef]
12. Marchin, R.M.; Ossola, A.; Leishman, M.R.; Ellsworth, D.S. A Simple Method for Simulating Drought Effects on Plants. Front.
Plant Sci. 2020, 10, 1715. [CrossRef]
13. Gorim, L.Y.; Vandenberg, A. Evaluation of Wild Lentil Species as Genetic Resources to Improve Drought Tolerance in Cultivated
Lentil. Front. Plant Sci. 2017, 8, 1129. [CrossRef] [PubMed]
14. Gorim, L.Y.; Vandenberg, A. Root Traits, Nodulation and Root Distribution in Soil for Five Wild Lentil Species and Lens Culinaris
(Medik.) Grown under Well-Watered Conditions. Front. Plant Sci. 2017, 8, 1632. [CrossRef] [PubMed]
15. Lehnert, H.; Serfling, A.; Friedt, W.; Ordon, F. Genome-Wide Association Studies Reveal Genomic Regions Associated with
the Response of Wheat (Triticum Aestivum L.) to Mycorrhizae under Drought Stress Conditions. Front. Plant Sci. 2018, 9, 1728.
[CrossRef] [PubMed]
16. Shirinbayan, S.; Khosravi, H.; Malakouti, M.J. Alleviation of Drought Stress in Maize (Zea mays) by Inoculation with Azotobacter
Strains Isolated from Semi-Arid Regions. Appl. Soil Ecol. 2019, 133, 138–145. [CrossRef]
17. Turner, N.C. Imposing and Maintaining Soil Water Deficits in Drought Studies in Pots. Plant Soil 2019, 439, 45–55. [CrossRef]
18. Blonquist, J.M.; Jones, S.B.; Robinson, D.A. Standardizing Characterization of Electromagnetic Water Content Sensors: Part 2.
Evaluation of Seven Sensing Systems. Vadose Zone J. 2005, 4, 1059–1069. [CrossRef]
19. Bogena, H.R.; Huisman, J.A.; Schilling, B.; Weuthen, A.; Vereecken, H. Effective Calibration of Low-Cost Soil Water Content
Sensors. Sensors 2017, 17, 208. [CrossRef]
20. Campbell, D.I.; Laybourne, C.E.; Ian, J. Blair Measuring Peat Moisture Content Using the Dual-Probe Heat Pulse Technique. Aust.
J. Soil Sci. 2002, 40, 177–190.
21. Earl, H.J. A Precise Gravimetric Method for Simulating Drought Stress in Pot Experiments. Crop Sci. 2003, 43, 1868–1873.
[CrossRef]
22. Kojima, Y.; Shigeta, R.; Miyamoto, N.; Shirahama, Y.; Nishioka, K.; Mizoguchi, M.; Kawahara, Y. Low-Cost Soil Moisture Profile
Probe Using Thin-Film Capacitors and a Capacitive Touch Sensor. Sensors 2016, 16, 1292. [CrossRef]
23. Ortiz, D.; Litvin, A.G.; Salas Fernandez, M.G. A Cost-Effective and Customizable Automated Irrigation System for Precise
High-Throughput Phenotyping in Drought Stress Studies. PLoS ONE 2018, 13, e0198546. [CrossRef] [PubMed]
24. Susha Lekshmi, S.U.; Singh, D.N.; Shojaei Baghini, M. A Critical Review of Soil Moisture Measurement. J. Int. Meas. Confed. 2014,
54, 92–105. [CrossRef]
25. Robinson, D.A.; Jones, S.B.; Wraith, J.M.; Or, D.; Friedman, S.P. A Review of Advances in Dielectric and Electrical Conductivity
Measurement in Soils Using Time Domain Reflectometry. Vadose Zo. J. 2003, 2, 444–475. [CrossRef]Agronomy 2022, 12, 349 13 of 13
26. Dobriyal, P.; Qureshi, A.; Badola, R.; Hussain, S.A. A Review of the Methods Available for Estimating Soil Moisture and Its
Implications for Water Resource Management. J. Hydrol. 2012, 458, 110–117. [CrossRef]
27. Chard, J.; van Iersel, M.W.; Bugbee, B. Mini-Lysimeters to Monitor Transpiration and Control Drought Stress: System Design and Unique
Applications; Utah State University: Logan, UT, USA, 2010.
28. Gebre, M.G.; Earl, H.J. Effects of Growth Medium and Water Stress on Soybean [Glycine Max (L.) Merr.] Growth, Soil Water
Extraction and Rooting Profiles by Depth in 1-m Rooting Columns. Front. Plant Sci. 2020, 11, 487. [CrossRef]
29. McCauley, D.; Levin, A.; Nackley, L. Reviewing Mini-Lysimeter Controlled Irrigation in Container Crop Systems. Hort Technol.
2021, 31, 634–641. [CrossRef]
30. Gebre, M.G.; Earl, H.J. Soil Water Deficit and Fertilizer Placement Effects on Root Biomass Distribution, Soil Water Extraction,
Water Use, Yield, and Yield Components of Soybean [Glycine Max (L.) Merr.] Grown in 1-m Rooting Columns. Front. Plant Sci.
2021, 12, 581127. [CrossRef]
31. Wright, D.E.J.; Cline, J.A.; Earl, H.J. Physiological Responses of Four Apple (Malus × Domestica Borkh.) Rootstock Genotypes to
Soil Water Deficits. Can. J. Plant Sci. 2019, 99, 510–524. [CrossRef]
32. Ahuja, L.R.; Nachabe, M.H.; Rockiki, R. Soils: Field Capacity. Encycl. Water Sci. Second Ed. 2008, 2, 1128–1131.
33. Thilakarathna, M.S.; Moroz, N.; Raizada, M.N. A Biosensor-Based Leaf Punch Assay for Glutamine Correlates to Symbiotic
Nitrogen Fixation Measurements in Legumes to Permit Rapid Screening of Rhizobia Inoculants under Controlled Conditions.
Front. Plant Sci. 2017, 8, 1714. [CrossRef]
34. Liu, F.; Jensen, C.R.; Andersen, M.N. Hydraulic and Chemical Signals in the Control of Leaf Expansion and Stomatal Conductance
in Soybean Exposed to Drought Stress. Funct. Plant Biol. 2003, 30, 65–73. [CrossRef] [PubMed]
35. Liu, F.; Andersen, M.N.; Jacobsen, S.E.; Jensen, C.R. Stomatal Control and Water Use Efficiency of Soybean (Glycine Max L. Merr.)
during Progressive Soil Drying. Environ. Exp. Bot. 2005, 54, 33–40. [CrossRef]
36. Ohashi, Y.; Nakayama, N.; Saneoka, H.; Fujita, K. Effects of Drought Stress on Photosynthetic Gas Exchange, Chlorophyll
Fluorescence and Stem Diameter of Soybean Plants. Biol. Plant. 2006, 50, 138–141. [CrossRef]
37. He, J.; Du, Y.L.; Wang, T.; Turner, N.C.; Yang, R.P.; Jin, Y.; Xi, Y.; Zhang, C.; Cui, T.; Fang, X.W.; et al. Conserved Water Use
Improves the Yield Performance of Soybean (Glycine Max (L.) Merr.) under Drought. Agric. Water Manag. 2017, 179, 236–245.
[CrossRef]
38. Medina, V.; Gilbert, M.E. Physiological Trade-Offs of Stomatal Closure under High Evaporative Gradients in Field Grown
Soybean. Funct. Plant Biol. 2016, 43, 40–51. [CrossRef] [PubMed]
39. Misra, R.K.; Padhi, J.; Payero, J.O. A Calibration Procedure for Load Cells to Improve Accuracy of Mini-Lysimeters in Monitoring
Evapotranspiration. J. Hydrol. 2011, 406, 113–118. [CrossRef]
40. Meena, H.M.; Singh, R.K.; Santra, P. Design and Development of a Load-Cell Based Cost Effective Mini-Lysimeter. J. Agric. Phys.
2015, 15, 1–6.
41. Walden-Coleman, A.E.; Rajcan, I.; Earl, H.J. Dark-Adapted Leaf Conductance, but Not Minimum Leaf Conductance, Predicts
Water Use Efficiency of Soybean (Glycine max L. Merr.). Can. J. Plant Sci. 2013, 93, 13–22. [CrossRef]You can also read