Avec les véhicules autonomes, vers une révolution de la mobilité - Marseille, 11 Juillet 2018 - agAM
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Avec les véhicules autonomes,
vers une révolution de la mobilité
Marseille, 11 Juillet 2018
P.Pélata
pelata@meta-strategy-consulting.com
STRATEGY CONSULTING @ppelat
Trois impératifs &
une convergence de technologies
Environnement
Nouvelles Nouvelles Nouvelles Saturation
Solutions Solutions de
Exigences Automomobiles Mobilité Urbaine
Cloud, Mobile, Social, Electrification &
IoT, Data Science, AI Automated Driving
Agenda
1. Mobilité à la demande
2. Les voitures autonomes
3. Une utopie urbaine?
4. Un leadership public indispensable
5. Les capabilités nécessaires
6. Les acteurs
7. Que faire?
Conclusion
1. MOBILITÉ À LA DEMANDE

La conquête de NYC De nouvelles exigences +
une plateforme cloud + un
nouveau modèle d’affaires
- L’app me connait
- Réactif 24x7
- Transparent
- Pratique
- Intégré avec d’autres apps
- Réduction du coût (pool)
- Offre élargie (XL, Assist,
Pool Express, Health,
Meal)
Source: Todd W.Schneider
Uber, Didi etc.. et leur impact
Uber: 3 Mds courses en 2017
2.5 M de chauffeurs dans > 450 villes
50% de courses partagées (Uber Pool) à San Francisco
+ Uber Eats, Uber Pool Express, Uber Health
Didi: 7.4 Mds courses en 2017
.. dans New York:
• Yellow cabs 8.6 M /mois (07-2017) 13,500 cars
• VTCs 11.6 M 68,000 cars Σ≈100,000 cars
• Autres 2.2 M 19,000 cars
source: MS research., Oct.2017. Data from NYC Taxi & Limousine Commission
L’impact (1) Dans 7 agglomérations US majeures (≈70M people, fin 2016) • ont déjà utilisé Uber ou Lyft ou.. 21 % • utilisent 1 à 3 fois / mois 8% • utilisent chaque semaine 5% La cannibalisation • Les taxis (et les loueurs pour l’activité « voyages d’affaires ») • Les transports publics • L’usage des voitures personnelles (pas encore la propriété) • L’auto-partage source: UC Davis., Disruptive Transportation: The Adoption, Utilization, and Impacts of Ride-Hailing in the United States Oct.2017

Et aussi..

Et enfin.. • Les livraisons à domicile augmentent de 9 à 10% /an

2. LES VOITURES AUTONOMES
What
WhatLevel
11Tradeoff Level of
BetweenofAutonomous
Autonomous
Proven Driving
Driving
vs. Pioneering Should
ShouldWe
Technologies, We Expect?
Expect?
Lower vs. Higher Cost
Définitions 1Implementation,
What Between
Tradeoff
Tradeoff Level
Between
Implementation,
Level 0
Implementation,
Tradeoff Between
1
ofand
and
and
Broad
Autonomous
Proven
Proven
Broad
vs.
Broad
Proven
vs. Limited
vs.Pioneering
vs.
vs.vs.
Pioneering
Limited
Pioneering
2
Adoption
Driving Should We
Technologies,
Technologies,
LimitedAdoption
Adoption
Expect?
Lower
Lower vs.
vs.Higher
HigherCost
Technologies, Lower vs. Higher Cost
3 4
Cost
5
Implementation, and Broad vs. Limited Adoption
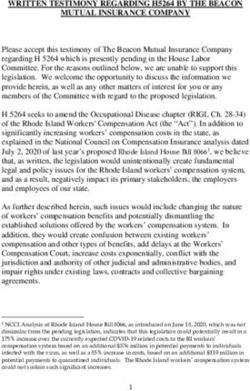
Driver Only Assisted Partly Automated Highly Automated Autonomous Driverless
Adaptive Cruise Tesla Autopilot 2.0
NA Tesla Autopilot 1.0 Google Pod Car
Control (In 2018)
Level 0 1 2 3 4 5
Driver Driven System Driven
Driver Only Assisted Partly Automated Highly Automated Autonomous Driverless
Level
Level00 11 22 33 44 55
Niveau 0
No System
NA
Driver
DriverOnly
LevelOnly
0 1
“Feet-off”
Adaptive Cruise
Assisted
Assisted
1
Control
Partly 2
“Hands-off”
Tesla Autopilot
PartlyAutomated
Automated
2 Highly
“Eyes-off”
1.0Automated
Highly 3
Automated
3
Tesla
4
“Brain-off”
Autopilot 2.0
Autonomous
Autonomous
4
(In 2018) 5
No Driver
Google Pod Car
Driverless
Driverless
5
Adaptive
AdaptiveCruise
Cruise Tesla
TeslaAutopilot
Autopilot2.0
2.0
Driver
NA Only
NADriven
Driver Assisted Partly Automated
Tesla Highly
TeslaAutopilot
Autopilot 1.0 Automated
1.0 Autonomous Driverless
Google
Google
SystemPod
PodCar
Car
Driven
Control
Control Driverless
(In during
(In2018)
2018)
Adaptive Cruise Driver defined
Tesla use case
Autopilot 2.0
DriverNA
Driven Tesla Autopilot 1.0 needs to be Google Pod Car
Google Driven
Pod Car
Driver Driven
No System “Feet-off”
Control “Hands-off” “Eyes-off”
ready to take over as a “Brain-off”
(In 2018) System
No Driver
System Driven
backup system Autonomous
Driver
No Driven “Feet-off” “Hands-off” “Eyes-off” “Brain-off” System Driven
NoSystem
System “Feet-off” “Hands-off” “Eyes-off” “Brain-off” No
NoDriver
Driver
Driver is in Full Control Driverless during
No System “Feet-off” “Hands-off”
monitoring mode “Eyes-off” “Brain-off”
defined use case No Driver
Driver needs to be
Driver in charge of Driverless
Driverlessduring
during
ready to take over as a
longitudinal or Vertical or Autonomous
defined
defineduse
usecase
case
backup
Driver
Driver needs
needssystem
totobebe
lateral control Lateral Control Driverless during
ready
readytototake
takeover
overasasa a Vehicle is capable of
Driver is in Full
backup
Driver Control
system
needs to be Autonomous
defined use case
Autonomous
Vertical or Vehicle
backup runs both
system Vehicle runs both performing all driving
monitoring mode ready to take over
longitudinally and as a longitudinally and tasks independently
Lateral Control
Driver in charge of Driver isisininboth backup Autonomous
Driver
Vehicle runs Full
laterally
Full insystem
Controlcertain
Control laterally in certain with no driver required.
longitudinal or Vertical
monitoring
monitoring mode
longitudinally orand
mode conditions. Vehicle will conditions. Vehicle Vehicle possibly does
Driver completely lateral
Driver
Vehicle
Driver in
takescontrol
incharge ofof of
charge
charge Driver
Lateral is in
Control
laterally in certain giveFull Control
advanced warning capable of establishing not have a steering
longitudinal oror Vertical
monitoring or
mode Vehicle is capable of
in charge other functions
longitudinal Vertical
situations or to driver a risk minimized state wheel or pedals
Vertical
lateral
Driver or of
incontrol
charge Vehicle runs both Vehicle runs both performing all driving
lateral control Lateral
LateralControl
Control tasks independently
longitudinal or Vertical or longitudinally and longitudinally and Vehicle
Vehicle isiscapable
capableofof
Lateral Control Vehicle runs both laterally in certain laterally in certain with no driver required.
From Auto 2.0: The New World of ACES Vertical
lateral control
oror Lateral Control Vehicle
Vehiclerunsrunsboth
both Vehicle
Vehiclerunsrunsboth
both performing
performing allalldriving
driving 28
Vertical conditions. Vehicle Vehicle possibly does
Goldman-
Lateral Control
longitudinally and longitudinally
longitudinally andwill
and conditions.
longitudinally
longitudinallyVehicle
and
and tasks
tasksindependently
Vehicle is capable
independently of
Sachs 2016 Driver completely Lateral
Vehicle Control
takes charge of laterally
Vehicle in certain
Vehicleruns
runsboth
both give advanced
laterally
Vehicle
laterallyinruns warning
incertain
both
certain capable
laterally
Vehicleofinruns
laterally establishing
incertain
both
certain withnot
with have
nonodriver
performing a all
driver steering
required.
driving
required.
Vertical orDeux voies vers la conduite autonome
Niveau 5
Niveau 4
Niveau 3
Niveau 2
Industrie Auto Uber
Autoroutes, Métropoles Partout
Valet Parking… quelques % puis 100%Google, le précurseur
2009: lancement du projet
2015: la Google Car sans volant ni pédale roule sur route ouverte
2016: Waymo est créé
2017: Programme « Early riders » à Phoenix: « vrais »utilisateurs
sur route publique avec chauffeur en back-up
2018: « vrais »utilisateurs sans chauffeur
Accord Waymo & Jaguar: 20,000 iPace(VEs) puis accord
avec Fiat-Chrysler pour 62,000 minivans
Roulage: 5 M miles cumulés
Simulations: 2.7 Mds miles/anWaymo en banlieue de Phoenix
…roughly a 15 x 15 km area“Waymo says it needs a 'large number' of cars for Europe robotaxi service” Reuters June 28, 2018
L’accord stratégique UBER & VOLVO
24,000 XC90 à livrer entre 2019 et 2021 … qui
s’intègreront
dans les
flottes de
robotaxis
d’Uber
Les media 30.11. 2017Dieter Zetsche (Sept. 2016) The Mobility of the Future is Connected. Autonomous. Shared. Electric. And driven by Mercedes-Benz!
Sans oublier les marchandises..
Nuro & Kroger (épicerie) partenaires
pour livrer avec un véhicule autonome
La e-palette de TOYOTALe robotaxi, robobus sans chauffeur, partagé, apte au transport de marchandises? électrique… et encore à inventer
… et électriques Croissance des véhicules électriques et hybrides rechargeables dans le monde
3. UNE UTOPIE URBAINE?
Une simulation: Lisbonne
Lisbon (la ville et l’agglomération)
Hypothèses:
- Métro et trains peuvent accroître leur trafic
- Suppression des grands bus
- avec 4 scénarios
. 100% robo-taxis en mode ride sharing
. 100% robot taxis
. 50% private cars + robot taxis in ride sharing
. 50% private cars + robot taxis
Complété par la présentation
“Shared Mobility solutions for Livable Cities”
Par José Viegas ITF Secretary-General
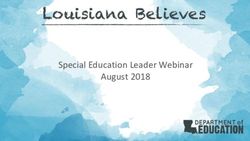
WCTR, Shanghai, July 2016Lisbonne (ville) avec des robo-taxis
Weekday or peak time Fleet size Veh.km # cars Parked Waiting Travel
average ! during peak travelling at cars time time
(7-10am) peak hour
Trips share ê
Base case 100% 100% 100% 100% 26 min 18 min
Public Transp. only Cars only
(Current)
100% Shared 10% 109% 35% 6% 4 min 16 min
Robotaxis
100% Robotaxis 17% 155% 57% 11% 3 min 11 min
50% private car usage 78%* 136% 91% 76% 4 min 20 min
& shared robotaxis
50% private car usage 82%** 156% 103% 79% 3 min 13 min
& robotaxis
* 6% shared robotaxis + 89% Private cars
** 11% robotaxis + 94% private carsDes transports “lourds” très sollicités
Parts modales en Réel 2010 Simulation
personne.km Lisbonne Banlieue Lisbonne Banlieue
Private Car (PC) 41.1% 57.5% --- ---
Motorcycle 1.0% 1.2% --- ---
Taxi 1.6% 2.1% --- ---
Bus 25.3% 22.1% --- ---
Walk/bicycle 10.5% 3.1% 15.6% 6.2%
Rail, Metro, Ferry 20.5% 13.9% 24.8% 21.6%
RoboTaxis (inc. feeder)* --- --- 11.7% 17.5%
RoboBus (inc. feeder)* --- --- 47.9% 54.6%
* L’importance des “feeders”: le nombre de trajets multi-modaux (voiture/bus + rail/métro/
ferry): Lisbonne 3% -> 16% banlieue 6%-> 14% avec le ride sharing + rail/métro/ferry.Bénéfices pour les villes
• Pollution î
Mais déjà…
• Accidents î
• Coût de la mobilité î Certaines villes US ont commencé
à subventionner Uber ou Lyft
• Bus subsidies î pour réduire des investissements
d’infrastructure ou éliminer des
• Temps de transport î “mauvaises” lignes de bus.
• Embouteillages î
Nice Métropole et Uber…
• Espace dispo dans les ruesìì
• Zone d’achalandage et bassin
d’emploi ìLa simulation sur Helsinki Une hypothèse moins ambitieuse: - Les bus sont remplacés pour desservir les arrêts des modes lourds - Remplacement de 20% des trajets de voitures - Robotaxis (partagés) & robobuses Voitures Km.Pass. : -19% Bus Km.Pass. : -25% Modes lourds: 0%
4. UN LEADERSHIP PUBLIC INDISPENSABLE
L’impact de la croissance des VTCs
New York City (Manhattan) (Juin 2013 è Juin 2017)
8h-19h 15h-19h
• Courses Taxis + VTCs + 15% + 37%
• Distance parcourue + 33% + 60%
• Temps total + 61% + 96%
• Vitesse moyenne - 18% - 19%
=> Discussion ouverte par le maire de NYC sur une taxe
pour circuler + une taxe par course dans Manhattan.
Source: “Empty seats, Full streets. Fixing Manhattan's Traffic Problem”, Schaller Consulting, Dec.2017,
Data from NYC Taxi & Limousine CommissionUn leadership public indispensable
• Baisse du coût de la mobilité à la demande => trafic ìì
Il faudra donc
• une régulation
• plus de courses partagées (ride-sharing)
• moins de voitures particulières (interdictions ou €..)
• des aménagements (prises en charge, déposes, gares etc..)
• des contrats de service avec des opérateurs de flottes
• un plan de transition robuste
• des simulations sophistiquées5. LES CAPABILITÉS NÉCESSAIRES
Opérer des flottes de robotaxis
• Des voitures autonomes, électriques, adaptées au ride-sharing
• Une plateforme de contrôle à distance
• Une plateforme de management
• Dispatch Management System (DMS) • Outils d’acquisition des data de
• App utilisateur (& app chauffeur) mobilité
• CRM • Outils de simulation (ABM)
• Moyen de paiement • IA, Machine Learning
• Des usines de nettoyage & recharge, des forces de terrain
• Des équipes de collaboration avec les territoires
• …capables d’étudier les scénarios d’introduction des robo-taxis et les
mesures d’accompagnement et de s’engager sur une qualité de service
• Des références/des pilotes pertinents6. LES ACTEURS POTENTIELS
Les acteurs potentiels • Les villes/agglomérations/métropoles • Google-Waymo, Uber, Didi, Lyft, Baidu… Amazon (marchandises) • Les constructeurs automobile (GM, Daimler,…) • Les entreprises de transport public (Transdev, Keolis, SNCF..) • Les Hertz, Avis, Europcar, Sixt… LeasePlan, ALD, Arval… • Les plateformes d’autopartage (Vulog, RideCell..) • Les énergéticiens • …la Chine
US DOT initiative (initiée fin 2015)
40M$ pour le gagnant
78 villes ont participé
US Department of TransportationLes acteurs potentiels • Les villes/agglomérations/métropoles • Google-Waymo, Uber, Didi, Lyft, Baidu… Amazon (marchandises) • Les constructeurs automobile (GM, Daimler,…) • Les entreprises de transport public (Transdev, Keolis, SNCF..) • Les Hertz, Avis, Europcar, Sixt… LeasePlan, ALD, Arval… • Les plateformes d’autopartage (Vulog, RideCell..) • Les énergéticiens • …la Chine
BUSINESS PORTFOLIO*
DAIMLER investit >1 B€ dans les Sces de Mobilité
CAR SHARING RIDE-HAILING MULTI-MODAL
moovel
car2go mytaxi CleverTaxi
Turo Taxibeat Careem
shareholding shareholding
WINNING Croove Flixbus
shareholding
Blacklane
shareholding
Via
shareholding
THE FUTURE 15mn
CUSTOMERS
+ Chauffeur Privé
+ JV with Via
>100
CITIES
BY BUILDING OUTSTANDING * YTD August 2017, numbers for car2go, moovel, mytaxi, Taxibeat, CleverTaxi.
Daimler AG
MOBILITY SERVICES
Klaus Entenmann, DFS Chairman of the Board of Management
Deutsche Bank dbAccess IAA Cars 2017 Conference Daimler Financial Services
(Sept. 13, 2017)MOIA (groupe VW)
Un pilote de “ride-sharing” à la demande à Hanovre
… après un essai d’un an et 3,500 clients
• 150 véhicules puis 250 dans 2 ans si ne nuit pas aux transports en commun
• Pas de dépose ou prise en charge sur les arrêts de bus ou stations de taxi
• Le coût d’un trajet MOIA
doit être > ticket de bus
• Obligation d’avoir un dépôt
avec 150 places
• 50% de véhicules zéro
émissions fin 2020Les acteurs potentiels • Les villes/agglomérations/métropoles • Google-Waymo, Uber, Didi, Lyft, Baidu… Amazon (marchandises) • Les constructeurs automobile (GM, Daimler,…) • Les entreprises de transport public (Transdev, Keolis, SNCF..) • Les Hertz, Avis, Europcar, Sixt… LeasePlan, ALD, Arval… • Les plateformes d’autopartage (Vulog, RideCell..) • Les énergéticiens • …la Chine
7. QUE FAIRE ?
Cela arrive vite! • Les VTCs continuent leur progression, tirés par les besoins de leurs clients et s’essaient au ride-sharing • Google-Waymo: exploitation commerciale fin 2018. Plusieurs villes et des milliers de voitures en 2019. • General Motors: exploitation commerciale en 2019 • Beaucoup d’argent est investi • Des pilotes dans des dizaines de villes
Se préparer dès aujourd’hui • Pleine conscience de l’avancement de la technologie du véhicule autonome • Apprentissage de ses impacts potentiels (simulations, benchmarking et pilotes à la bonne échelle) • Partenariats avec les acteurs pertinents • Développement du ride-sharing avec chauffeurs préparant les premiers robotaxis • Préparer la multimodalité 2.0 dans la ville, MaaS (app et plateforme) et aménagement des rues, gares etc.. • Construire, simuler, discuter, comparer des scénarios de transition
CONCLUSION
Sans oublier… Uber Elevate Initiative Livre Blanc 27 Octobre2016 Fast-Forwarding to a Future of On-Demand Urban Air Transportation
MERCI
You can also read