Rosbot Training - Module 2 Environment Setup - ROBOWORKS - Authors: Janette Lin & Wayne Liu 3 January 2023 Module: #2
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
www.roboworks.net/training
ROBOWORKS
Rosbot Training - Module 2
Environment Setup
Authors: Janette Lin & Wayne Liu
3 January 2023
Module: #2
Copyright © 2023 Roboworks. All rights reserved.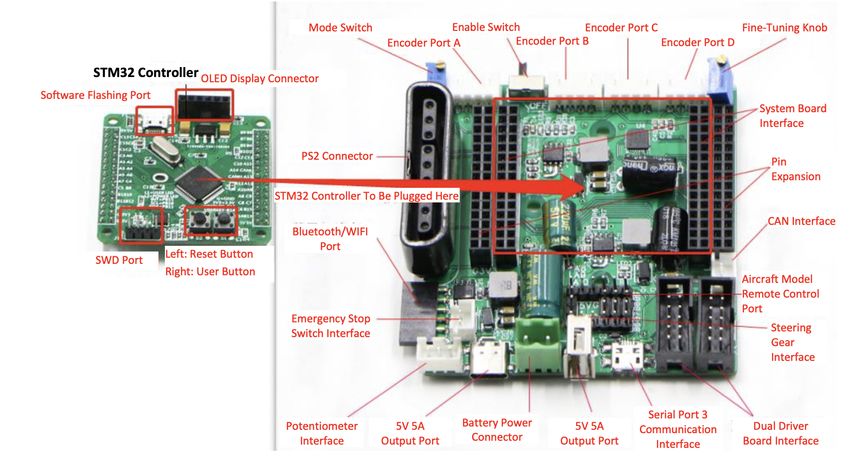
www.roboworks.net/training
TABLE OF CONTENTS
2. Environment Setup
2.1 Install Ubuntu
2.1.1 Installing Ubuntu on the Virtual Machine
2.1.2 Installing Ubuntu for the Controller
2.1.3 Environment Set Up
2.1.3.1 Desktop Interfaces
2.1.3.2 Desktop Environment
2.1.3.3 Jetson Nano Environment Configurations
2.1.3.4 Connecting to Wifi
2.2 Install ROS
2.2.1 Establishing the ROS Workspace
2.3 Install Rosbot ROS Packages
2.3.1 ROS Packages Configuration
2.4 Connect PC to Rosbot via Wifi
2.4.1 Configuring WiFi Hotspots
2.4.2 Configuring a Static IP for the WiFi
2.4.3 WiFi Tips
2.4.4 SSH into the Rosbot
2.5 Connect Mobile to Rosbot via Bluetooth
2.6 STM32 Setup
2.6.1 Small Rosbot STM32
2.6.2 Large Rosbot STM32
Copyright © 2023 Roboworks. All rights reserved.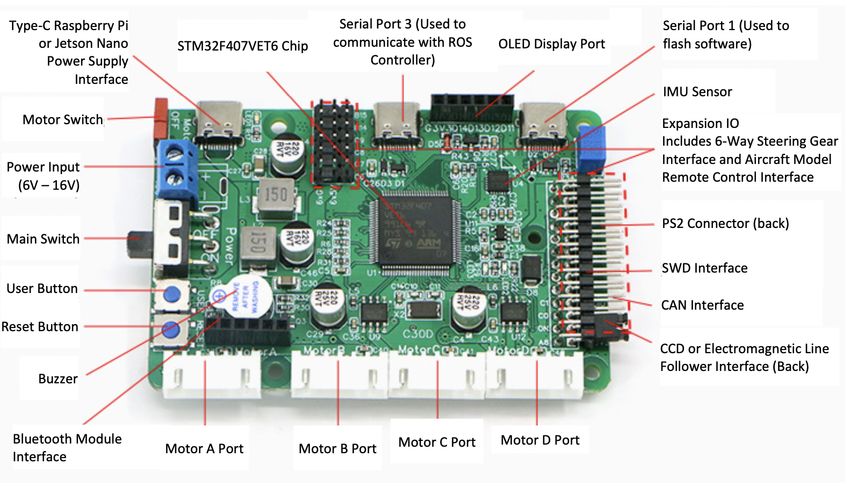
www.roboworks.net/training
MODULE 2 SUMMARY
This module covers the setup of Ubuntu and ROS on a virtual machine and controllers,
including the configuration and required settings of the development environment. The
basics of Ubuntu are not included in this document however documentation on the specific
usage of some linux instructions can be searched on both the ROS official website and the
Ubuntu official website. This tutorial is primarily for ROS2.
This module provides tutorials on the necessary development environment configuration. If
you are unfamiliar with the Linux environment, you may wish to read Chapter 16 “Some
Basics about Ubuntu” first. There are two types of Ubuntu that this module will cover: the
Rosbot’s Ubuntu and the VM’s Ubuntu. The accounts of both of these types of Ubuntu can
be found in the tables below.
Table 0-0: Rosbot Ubuntu Login
Username Password Wifi Name Wifi Password IP
Refer to Table
ROS Machine wheeltec dongguan dongguan 192.168.0.100
0-2
Table 0-1: Virtual Machine Login
Client Machine Client Name Machine Name Password IP
Virtual Machine wheeltec_client vmware dongguan Custom
Table 0-2: The Different Wifi Names
Car Type Wifi Name
ALL WHEELTEC_CAR + (0 - 2)
In the provided ROS Machine (Rosbot) and Virtual Machine, the configurations for the
following Ubuntu and ROS versions are already completed.
Ubuntu version: 18.04.5 LTS ROS version: ROS1 Melodic
A pre-configured image for Ubuntu 20.04 with ROS2 Galactic is also provided in the
supplementary files.
Copyright © 2023 Roboworks. All rights reserved.
www.roboworks.net/training
ROBOWORKS
Table 0-4: Controller Specifications and Preset Configurations
Controller Jetson TX1 Jetson NANO Jetson Xavier NX Raspberry Pi Computer
Architecture ARM X86
System Bit 64
CPU Cores 4 4 6 4 4
Jetpack
4.5.1 4.5.1 4.5
Version
CUDA
Driver 10.2 10.2 10.2
Version
OpenCV 3.4.5 3.4.5 3.4.5
3.2.0 3.2.0
Version 4.1.1 4.1.1 4.1.1
16G (emmc) 16G (emmc)
64G (SD card)
+64G (SSD) +128G (SSD)
OR
Memory OR OR 32G (SD card) 128G
16G (emmc)
16G (emmc) 16G (emmc)
+ 64G (USB)
+64G (SD card) +64G (USB)
Remarks No deep learning No deep learning
functionality functionality
No ZED No ZED
environment (No environment (No
NVIDIA GPU) NVIDIA GPU)
No skeleton pose No skeleton pose
following following
functionality functionality
No robotic arm
functionality
Copyright © 2023 Roboworks. All rights reserved.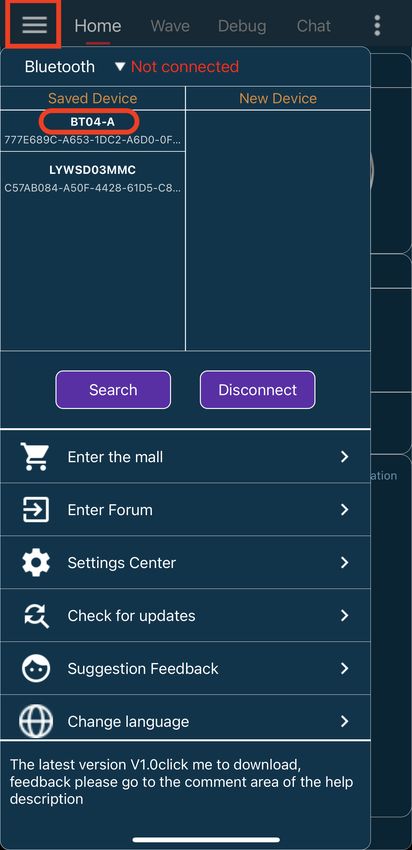
www.roboworks.net/training
2.1 Install Ubuntu
2.1.1 Installing Ubuntu for Virtual Machine
1. Install Ubuntu
If you would like to run Ubuntu on a Windows system, first install VMware Workstation (provided in our
software and drivers). The installation of VMware Workstation will not be covered in this tutorial. When setting
up a virtual machine, using the default settings will be sufficient. Virtual machine (VM) images for ROS1 and
ROS2 may be found on our website at https://www.roboworks.net/support in the download center. Note that
these are only compatible with VMware Pro Workstation or Fusion (for Mac).
New Virtual Machine
To install Ubuntu onto the virtual machine, an Ubuntu image is needed. Download the required Ubuntu iso file
from the official Ubuntu website (this may be Ubuntu 18.04.5 LTS for ROS1 or Ubuntu 20.04 for ROS2). Then
use the iso file to boot the VM into Ubuntu. Silicon Mac users may choose to use UTM or parallels.
Connecting to the Rosbot using a Virtual Machine
Please ensure that the virtual machine application being used has network configuration capabilities. A
“bridged network” will be required in order to successfully communicate with the Rosbot.
2. Install Terminator (Recommended)
Due to ROS often requiring the use of multiple terminals at once, we recommend the installation of an
application that enables the opening of multiple terminals in one window. The download software in Ubuntu is
obtained from the software source, thus we first enter the following command to update the software source.
sudo apt update
After the command has finished executing, enter the following command.
sudo apt-get install terminator
After the installation has finished, open a new terminal. This time, the interface of the terminal is slightly
different. Right-clicking on the terminal will show new options that come with terminator to split the terminal
vertically or horizontally (Figure 2.1.1). Note that if a sub-terminal is closed, the other windows will flesh out. If
the window is closed, all sub-terminals will be closed.
Copyright © 2023 Roboworks. All rights reserved.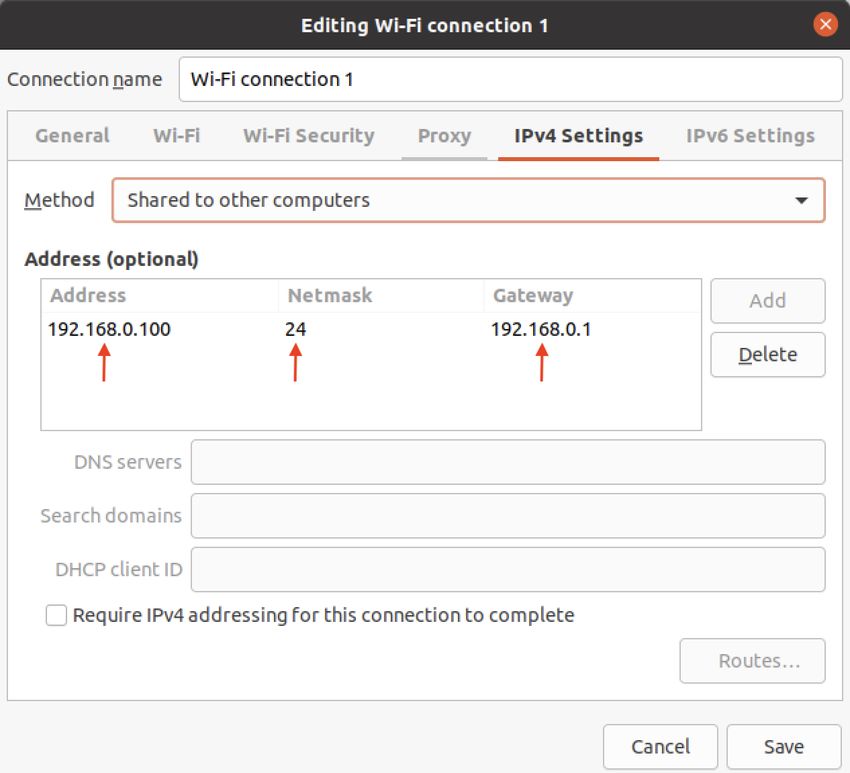
www.roboworks.net/training
Figure 2.1.1
2.1.2 Installing Ubuntu for Controllers
PLEASE NOTE: The controllers should come with a USB or SD card with a working Ubuntu 18.04 image
which has ROS1 Melodic installed. This section is only for those who wish to create their own image from
scratch.
Installing Ubuntu on a SD card or USB
If you would like to set up your own working environment from scratch, you will require an Ubuntu iso image,
an SD card (32GB+) or USB (32GB+) and a computer.
The Ubuntu image can be downloaded from the Ubuntu website or for the Jetson series the SD card image
can be downloaded from the NVIDIA website (https://developer.nvidia.com/embedded/downloads#?
search=Image). Note that images built with Jetpack 4 are based in Ubuntu 18.04 and images built with
Jetpack 5 are based in Ubuntu 20.04.
Once the image has been downloaded you can now flash the image onto the SD card or USB. We
recommend used Balena Etcher (https://www.balena.io/etcher) or Rufus Etcher for this.
Copyright © 2023 Roboworks. All rights reserved.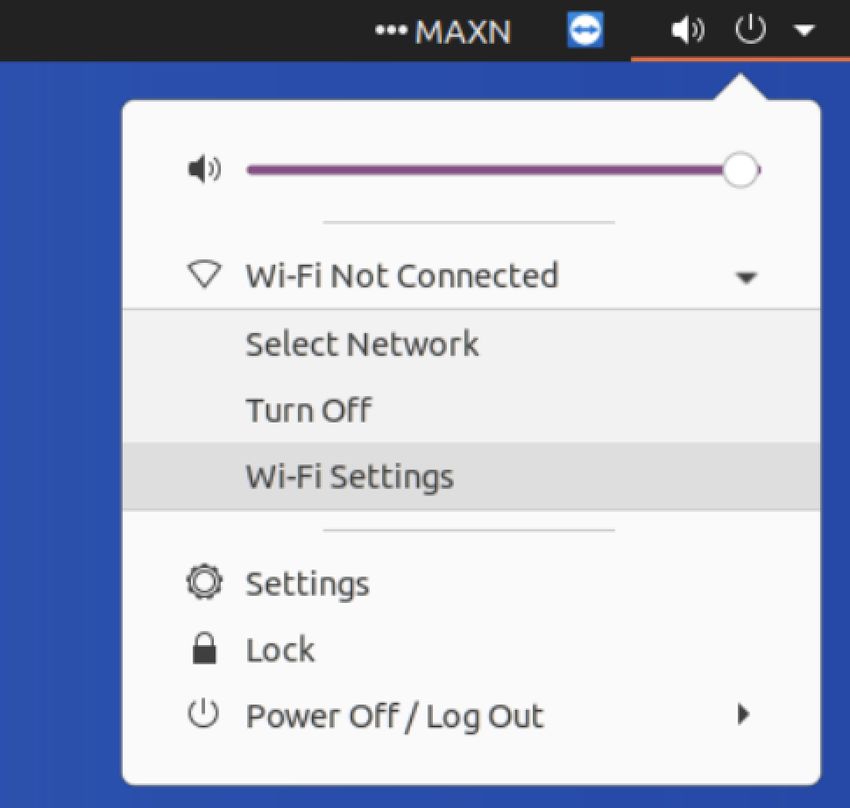
www.roboworks.net/training
Figure 2.1.2
Jetson Xavier Ubuntu
The emmc for the should first be flashed with Jetpack 4 for Ubuntu 18.04 and Jetpack 5 for 20.04. Then, the
Xavier should be booted from a USB or SD with an Ubuntu image.
2.1.3 Interface and Environment Set Up
Desktop Interface
After booting from the freshly flashed SD or USB, connect the controller to a display (through HDMI), keyboard
and mouse. Upon first boot, a username and password may need to be created. If the controller boots into
console only, run the following line to install a general user interface (GUI).
sudo apt install xubuntu-desktop
Once the install is complete, a restart is required. To restart the system enter the following command:
reboot
After the restart, there will be a system desktop GUI in which you can enter your password to log in.
Desktop Environment
After installing the GUI, the desktop environment will also need to be installed. Use Ctrl+Alt+T to open a new
terminal and run the following command to install this:
Copyright © 2023 Roboworks. All rights reserved.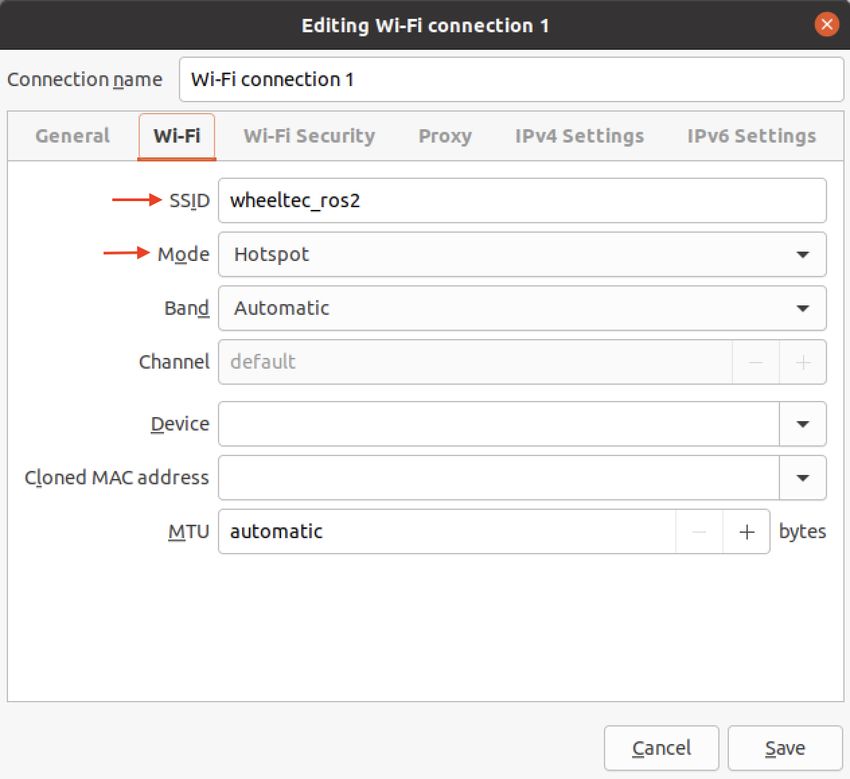
www.roboworks.net/training
sudo apt-get install gnome —fix-missing
Once the installation is complete, reboot and the system will be ready for normal use.
Internet Connection for Controllers without Onboard Wifi Modules
There are two general ways to connect to the internet. The most convenient way is through plugging
a network cable into the LAN port of the router to connect to network. The second way is to
connect to the network using a USB wifi card.
Jetson Nano Special Environment Configurations
Before the Jetson Nano image can be used, a few environment configuration variables will need to be
modified:
1. Use gedit to open the .bashrc file from terminal:
sudo gedit ~/.bashrc
2. Add the following three lines to the end of the file:
export PATH=/usr/local/cuda-10.0/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-10.0
3. Re-execute .bashrc:
source ~./bashrc
4. Enter the command -ncvv to check whether the modification was successful. If the following
information is displayed, the modification is correct.
wheeltec@wheeltec:~$ nvcc -V
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2018 NVIDIA Corporation
Built on Sun_Sep_30_21:09:22_CDT_2018
Cuda compilation tools, release 10.0, V10.0.166
The Jetson Nano also does not come with a built-in wifi module. The following section, will cover
how it can connect to networks.
Copyright © 2023 Roboworks. All rights reserved.
www.roboworks.net/training
A Third Network Option for Jetson Nano
Another way to connect to the internet on the Jetson Nano is to install a wireless module (purchased
separately).
The M.2 Key E interface is reserved on the main board of the Jetson Nano which can be used to
connect to a wireless network card. Note that this interface is only compatible with a wifi network
card. To install the wireless module, the main chip of the Jetson Nano needs to be removed from the
motherboard: remove two screws, then gently remove the card locks on both sides of the radiator.
The main chip board and the radiator will pop up, gently pull them out of the slot, insert the wireless
module in the slot located on the motherboard, and reinstall the main chip board. Install the wireless
module and find WIFI signals to connect to after boot.
2.2 Install ROS
NOTE: The Rosbot’s come with ROS already installed. This section is relevant for those who are building a
new image from scratch.
To install ROS please refer to the official ROS installation guide:
https://docs.ros.org/
For ROS1 the Rosbot will come with packages compatible with ROS1 Melodic.
For ROS2 the Rosbot will come with packages compatible with ROS2 Galactic.
Please ensure that the ROS distribution suits the intended use if downloading a different distribution. The
installation of ROS will be the same for both Virtual Machines and controllers.
2.2.1 Establishing the ROS2 Workspace
To communicate between ROS on the controller and ROS on an external machine a ROS workspace
environment is required. Thus, it is necessary to create ROS workspaces on both devices. Note that the
controllers will already come with a workspace and ROS packages.
1. Create a colcon workspace
The first step to setting up the workspace environment is to create a folder. The name and path of the folder is
up to preference. The folder used in this tutorial is robo_ws which is created in root. It is recommended to use
command line to create the folder.
Step 1: Enter the following command to create the new folder:
mkdir -p robo_ws
Copyright © 2023 Roboworks. All rights reserved.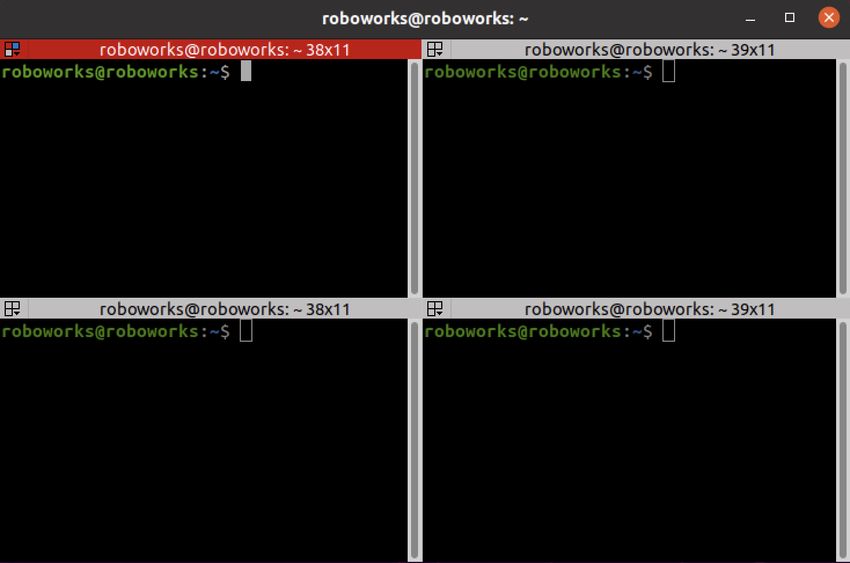
www.roboworks.net/training
Step 2: Go into robo_ws and make a new directory called src. Note that this folder must be called src.
cd robo_ws
mkdir src
Figure 2.2.1
Step 3: Before building the workspace package dependencies will need to be resolved. If any ROS2 packages
were copied into src, then there may be dependencies. It may be the case that all the dependencies are
already installed. Best practice is to check for dependencies every time files are cloned into the workspace.
Run the following command from the root (robo_ws) of your workspace (i.e. if you are in src enter “cd ..” to
return to robo_ws:
rosdep install -i —from-path src —rosdistro galactic -y
If all the required dependencies are already installed, the console will return:
#All required rosdeps installed successfully
Step 4: Build the workspace using colcon in the root (ros2_ws) folder. After building, there will be new folders
created in the root folder as seen in Figure x:
colcon build
Figure 2.2.2
Note: one of the differences between ROS1 and ROS2 is the use of catkin and colcon. The first step to setting
up the workspace environment is to set up a colcon workspace.
2.3 Install Rosbot ROS Packages
IMPORTANT: The Rosbot image comes with packages already installed. This section is only for those who
wish to use a new Ubuntu image. Please skip to 2.3.1 if the packages are already installed.
The Rosbot ROS packages are provided with the Rosbot. To use these packages, create a new catkin or
colcon workspace and replace the src folder by the provided src folder. Remember that ROS1 uses catkin and
ROS2 uses colcon. This tutorial uses a ROS2 workspace and ROS2 packages. Once the src folder is
replaced, run the following command in the root of the workspace:
cd ~/robo_ws #navigating to root
colcon build
Once the workspace successfully builds, the Rosbot packages are ready to be used.
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
Key packages that will come with the Rosbot include the following:
turn_on_wheeltec_robot - used to control the parts of the robot and connect everything.
wheeltec_robot_keyboard - used for keyboard control of the robot.
wheeltec_robot_nav2 - used for robot navigation.
wheeltec_robot_slam - used for mapping (Cartographer / gmapping).
wheeltec_robot_urdf - the model of the robot.
wheeltec_rviz2 - used for visualisations of the robot and surrounding environment.
Potential Barriers
Some errors may come from the dependencies not being installed. Refer to section 2.2.1 to check how to
install the dependencies.
2.4 Connecting to the Rosbot via Wifi
To work on the Rosbot remotely, an internet connection to the robot should be established. If the Rosbot
already produces a wifi hotspot, the following sections 2.4.1 and 2.4.2 can be skipped.
In order for external machines to communicate to the Rosbot, the Rosbot will need to produce a point of
connection (i.e. a wifi hotspot for a network connection). The default IP address is dynamically assigned by the
system. This can make it inconvenient as the IP is required to be known by the user to establish the
connection. To solve this, a static IP can be set.
2.4.1 Configuring WiFi Hotspots
The set up of the static IP address in this tutorial uses the desktop general user interface which makes the
process more efficient. First connect a display, keyboard and mouse to the Rosbot. Locate the “down arrow”
on the upper right corner of the screen and navigate to the wifi settings through “Wi-Fi Settings” (Figure 2.4.1).
If there is a preset hotspot, a simple hotspot can be activated from here.
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
Figure 2.4.1
Open up a terminal and enter the following command. Wait for the network connection window to pop up.
nm-connection-editor
By default, the network connection section will be blank. Click “+” to add a new WiFi with connection type
“Wi-Fi” (Figure 2.4.3).
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
Figure 2.4.2
Figure 2.4.3
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
To set the WiFi interface, first set the name and mode of the Wi-Fi (hotspot mode). The name of the WiFi and
the WiFi name (SSID) and can be customised to self-preference (Figure 2.4.4).
Figure 2.4.4
By default, there is no password for the newly created WiFi. The password will need to be set manually. To do
so, click “WiFi security” and change the parameter for security to “WPA & WPA2 Personal” and input a
password.
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
Figure 2.4.5
As WiFi configuration is complete, the next step is to set a static IP in the same window.
2.4.2 Configuring a Static IP for the WiFi
Continuing on the same window, click “IPv4 Settings”. The parameters will initially be empty. Click “Add” to
add a static IP address. Enter the IP address, net mask and gateway respectively according to Figure 2.4.6.
Once these are filled in, the static IP set up is complete. Click “Save” to exit.
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
Figure 2.4.6
After saving, a WiFi signal symbol will be shown in the upper right corner of the screen. The popup when the
cursor is hovered over the symbol will also show that the connection has been set successfully.
At the point where the WiFi and static IP has been set up, restart Ubuntu (the controller). After the restart, open
the terminal, enter “IP A” or “ifconfig” to check the IP address. The IP address should have been modified to
192.168.0.100 or the IP set earlier.
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
2.4.3 WiFi Tips
1. WiFi starts automatically when turned on by default, no other operation is required (on initial images
provided by Roboworks)
2. Controllers with only one wireless card (for Raspberry Pi) cannot connect to WiFi and transmit WiFi at the
same time. Therefore, turn off transmitted WiFi to connect to the available networks.
3. Restarting Ubuntu will automatically restart WiFi.
2.4.4 SSH into Rosbot
After connecting to the wifi hotspot on an external machine (i.e. Virtual Machine or device running Linux OS),
run the following command to ssh into the Rosbot for remote development and control:
ssh -Y wheeltec@192.168.0.100
Note that the “-Y” is required to gain full control of the Rosbot.
2.5 Connect Mobile to the Rosbot via Bluetooth
To control the Rosbot from a smartphone, a bluetooth or wifi connection may be established from an
application. First download the “WHEELTEC” application from the App Store (IOS) or Play Store (android). After
installing ensure that the Rosbot is turned on. Then, open the application and open the menu from the upper
left corner (Figure 2.5.1).
Figure 2.5.1
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
If the Rosbot has not been connected to before, it will show up in the right-side list of the available bluetooth
connections. The Rosbot’s will generally have a name similar to “BT04-A” with the password “1234”. Once
connected, move forward to unlock the mobile control capabilities of the Rosbot.
2.6 STM32 Setup
The Rosbot series comes with different STM32 boards depending on the size of the Robot. This section will
cover two STM32 boards that are used on the Rosbot.
2.6.1 Rosbot Pro and Plus STM32
The Rosbot’s Pro and Plus typically have the following STM32 controller, with the connections shown in Figure
2.6.1.
Figure 2.6.1
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
2.6.2 Rosbot Mini STM32
There are two STM32 boards that can come with the Rosbot Mini: C10A and C30D. Table 2.6.1
highlights the specifications of the boards and Figures 2.6.2 and 2.6.3 highlight the connections.
Table 2.6.1, STM32 Board Specifications
Product C10A (Two-Wheel Drive) Controller C30D (Four-Wheel Drive) Controller
Master Chip STM32F103RCT6 STM32F407VET6
Max. Drivable Motors 2 4
Ackerman Chassis, Differential
Ackerman Chassis, Differential Chassis, Truck-Based Chassis,
Chassis Type
Chassis, Truck-Based Chassis Mecabot Chassis, Omnibot Chassis,
Four-Wheel Drive Chassis
Number of Drivable PWM
4 6
Servos
1-4 Degrees of Freedom Turbine 1-6 Degrees of Freedom Turbine
Drivable Arm Type
Manipulator Manipulator
Serial Ports 2 4
Pin is drawn out, CAN chip needs to
CAN Interface Integrated CAN chip
be connected
GPIO Ports ~10 Dozens
Lidar Interfaces 1 (Provide Radar Acquisition Code) No Special Interface, Requires DuPont
Line Connection
ROS Base Code and Software not provided, supports Provided
ROS SDK hardware, recently updated software
IMU Chip Onboard MPU6050 Module Onboard MPU6050
Line Follower Interface Linear CCD Module, Electromagnetic Line Following Module
Download Interface Support Serial Port Single Click Download, SWD Interface
External Power Supply Independent 5V5A, one 3V and 5V battery-powered parallel output
Interface
Board Size (mm) 85.5 * 57.5
Board Weight 36g
Installation Hole Pitch Aperture: 3mm, Hole Pitch: 49*58mm
Board Layers Industrial Grade Four-Layer Board
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
Circuit Protection Overheat Protection, Short-Circuit Protection, Overcurrent Protection
Main Power Switch and Equipped
Motor Enable Switch
Human-Computer Buttons, Buzzer, OLED Display, LED lights
Interaction Related
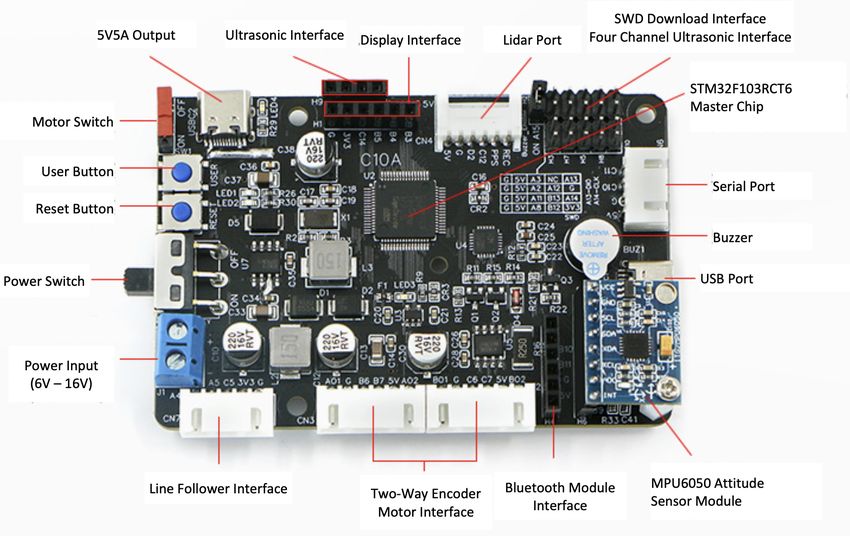
C10A Controller Connections
C10A is designed based on the smart car and ROS environment. It can control various chassis including
Ackerman, differential, truck-based, etc. Corresponding codes and tutorials are provided. The main board can
communicate with the outside world through the serial ports and provides a 5V5A interface for external
communication with Raspberry Pi’s or board power supply for controllers such as the Jetson Nano. Code and
schematics are fully open source.
Figure 2.6.2
Copyright © 2023 Roboworks. All rights reserved.www.roboworks.net/training
C30D Controller Connections
C30D is the main controller of the ROS educational robots, also designed based on the ROS environment. It
can control various chassis including Ackerman, differential, megabit, onmibot, track-based, etc.
Corresponding codes and tutorials are also provided. The main board can be connected through the serial
port or CAN to communicate with the outside world and provides a 5V5A interface for external communication
with Raspberry Pi’s or board power supply for controllers such as the Jetson Nano. Code and schematics are
fully open source.
Figure 2.6.3
Copyright © 2023 Roboworks. All rights reserved.You can also read