Prototype Moon Rover tested in Noordwijk - luvmi-x
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Prototype Moon Rover
tested in Noordwijk
Karsten Kullack, Jeremi Gancet, Space Applications Services NV
In December 2018 a team of European space companies and universities
came to Noordwijk to test a new, compact prototype Moon rover
equipped with a suite of instruments aimed at measuring lunar volatiles,
such as water, hydrogen and methane. The trials marked the end of a
first development phase, the results of which are now being used in a
follow-on activity.
4
T
he project named LUVMI, for on the Moon, with diurnal changes in München and OHB System (Germany). It
‘Lunar Volatiles Mobile Instru- the signal and increased concentrations uses the core drill principle, as applied in
mentation’, is an undertaking of towards higher latitudes. This data is com- terrestrial geology, to obtain cylindrical
a consortium of Belgian, German, plemented by the results of the LCROSS core soil samples, and combines that with
and British space companies and universi- (Lunar Crater Observation and Sensing a central heater element. After inserting
ties, and is co-funded by the European Satellite) impactor mission, which indicat- the hollow auger drill up to 20 cm into the
Commission’s Horizon 2020 programme. ed 5.6 +/- 3% water in the ejecta plume of ground, the enclosed sample is heated to
The consortium leader, Space Applications the Cabeus crater. However, only a surface release volatile components. The released
Services NV, a Belgian SME, has offices mission can provide ground truth data and gas is led to a quadrupole ion trap mass
in Noordwijk just opposite of ESTEC, and investigate the actual state and distribu- spectrometer, developed by the Open
the ‘Mars yard’ terrain of neighbour DE- tion of lunar volatiles on the surface. University (UK), which allows measure-
COS BV, as well as the sandy dunes at the Previous surface missions to the Moon or ment of a wide range of ion species (mass
beach, offered the perfect location for vari- Mars have mostly been either very large range of m/z from 10 to 200) with a parts-
ous outdoor trials. and costly, with complex drill and sample per-million sensitivity. This would enable
handling mechanisms, or very small with the detection of all volatiles species that
Background and Motivation rather limited scientific capabilities. The were identified in the LCROSS ejecta
One of the currently most debated ques- LUVMI project and its follow-on LUVMI-X plume. A similar type of spectrometer
tions in lunar science is the amount of is attempting to find a solution in between was flown on the Rosetta mission’s Philae
water and other volatiles in the lunar that can provide almost as much scientific lander, which measured the organic com-
regolith. This is of particular interest due output as a large platform, yet is sufficient- position of the nucleus material of comet
to their possible utilisation as an in-situ ly compact and lightweight to be carried 67P/ Churyumov-Gerasimenko.
resource for future exploration missions, to the Moon as a secondary, ‘piggyback’ The instrument package is complement-
and because of wide-ranging implica- payload rather than needing its own dedi- ed by a novel set of cameras based on the
tions for solar system science. Lunar cated mission. This can be achieved by the light-field technology, which offers a sim-
volatiles have been theorised to exist in combination of an autonomous, 4-wheel ple and robust 3D imaging solution with
frozen form in Permanently Shadowed rover with active suspension and an inno- no moving parts. This is used both for the
Regions (PSRs) and in chemically or physi- vative instrument package. supervision of drilling operations and in
cally bound states inside surface particles. support of the navigation of the rover.
Various remote sensing missions were Lunar instrument package The cameras with light-field optics are
conducted in lunar orbit in recent decades The scientific payload consists of a com- developed by Dynamic Imaging Analyt-
and provided encouraging results. Bistatic bined Volatiles Sampler (VS) and Volatiles ics (UK). The Surface Camera (SurfCam)
radar observations, infrared spectroscopy Analyser (VA), which enables drilling into can provide depth information of the
measurements and neutron-spectroscopy the lunar soil and direct sensing of volatile drill sites and rover tracks, as well as an
data from Clementine, Lunar Prospector, constituents without complex (and there- overview of drilling operations. The Navi-
Cassini, Deep Impact, Chandrayaan-1 fore fault prone) sample handling or trans- gation Camera (NavCam) will be used to
and the Lunar Reconnaissance Orbiter fer mechanisms. The sampler is a joint generate point clouds of the surrounding
missions suggest the existence of water development of the Technical University environment, enabling the identification
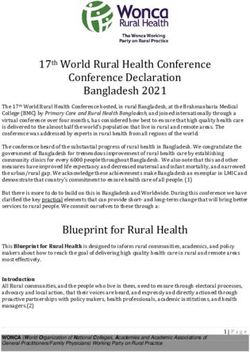
Ion
Trap
Mass
Spectrometer
Reference
Gas
System
Orifice
P1
Pressure
Sensors
Hea
The LUVMI-X concept.
of hazards and possible points of inter- touch the ground as to obtain maximum movement, including forward, backward,
est. These data is fed into the on-board depth with the drill. In addition, a passive diagonal (“crab” move) and rotational
computer, which allows partial or fully rocker-bogie mechanism provides the (spot-turn), which were all tested.
autonomous driving to short distance rover with a high obstacle clearance (up The rocky soil at the Mars yard posed an
waypoints. to 0.3 meter) compared to its size, while unexpected challenge for the drive train.
limiting the overall mass compared to a The traction on pebbles gave rise to re-
Rover platform six-wheel rover with similar capabilities. petitive shocks, eventually stressing the
Since mapping of the spatial distribution A rocker-bogie system allows the rover wheel suspension, and small deforma-
of volatiles on the lunar surface, and their to adapt the wheel positions passively so tions were detected in lateral attachment
correlation with existing remote-sensing that contact of the four wheels with the plates that were not anticipated during
data, are among the prime objectives ground is maximised at all times. design and simulation.
of LUVMI, the mobility of the system, Space Applications Services has a long The second part of the tests, in sand dunes
including the possibility to take measure- track record of robotic systems devel- by the beach, covered a notional end-to-
ments inside and outside of PSRs, is es- opment for space and terrestrial envi- end scenario of operations, including a
sential. A rover platform with supporting ronments – as well as experience with traverse of 50 meters, stopping and per-
subsystems (power supply, thermal con- the operation of such robotic systems. forming drill operations, and driving back
trol, communication, on-board computer For instance, in the ESA METERON to the starting point. This sequence was
with locomotion control and navigation programme, robotics devices were con- conducted in tele-operated and partial
software, illumination units) is therefore trolled from the ISS by Danish astronaut autonomous mode, without line of sight
the second key element besides the Andreas Mogensen in a tele-operated control.
instrument package. It is developed by mode, under the supervision of the Space The trails included operations in darkness
Space Applications Services (Belgium), Applications Services operations team. and unknown terrain, thereby testing also
which has the lead also on systems engi- the collaboration of the rover’s lighting
neering and overall integration. Testing in Noordwijk units, cameras, and onboard computer
The rover is based on a 4-wheel drive The rover is capable of driving on slopes with its mapping and autonomous navi-
train with deployable, adjustable suspen- of 20 degrees (targeting up to 30 degrees) gation software. The design is aimed at a
sion. It offers the possibility to adjust the while carrying a payload of up to 30 kg, short 14-day mission, i.e. a full lunar day,
chassis height from 0 to about 300 mm and this was one of the points to be tested since the rover is not designed to survive
from the ground. This is used to deploy or in a realistic environment. The gradeabil- the lunar night. Nevertheless, short ex-
stow the rover (then fitting in a volume of ity, traction and steerablility was put to cursions into dark craters, shadow areas,
95 x 85 x 40 cm) and also allows adjusting the test first in the Mars yard terrain of or beyond the day/night terminator will
the ground clearance to improve navi- DECOS BV, which has rocky soil, followed be of great use to achieve the scientific
gability on hazardous terrain. The same by similar tests on sand at the Noordwijk objectives. It was therefore important to
mechanism is exploited for on-spot drill beach. The individual control and steering demonstrate this capability, which is re-
positioning where the platform needs to of each wheel allows various modes of quired as part of the operations concept.
6 Ruimtevaart 2020 | 2
LUVMI testing near the beach at Noordwijk.
…and back in the lab under all conditions while torque was gen- the payload complement can be tailored
Not included in the Noordwijk campaign erated by the drill. and configured for different missions tar-
was the functional and performance test- An overview of LUVMI activities has been geting polar regions as well as equatorial
ing of the VS and VA, since volatiles release presented at the 15th Symposium on regions of the moon. LUVMI-X will further
and detection can only be tested under Advanced Space Technologies in Robotics optimise the rover mass-to-payload-mass
vacuum conditions. These were therefore and Automation ‘ASTRA 2019’, 27-28 May ratio, to make the concept economically
tested separately prior to integration, and 2019, at ESTEC, Noordwijk, as well as the viable also as a commercial service.
then together in a purpose made thermal International Astronautical Congress IAC, LUVMI and LUVMI-X are both potential
vacuum chamber in Munich. One of the 21-25 October 2019 in Washington DC. candidates for upcoming robotic missions
challenges of that test was the prepara- to the moon with a time horizon of 4 up to
tion and conditioning of a representative LUVMI-X 6 years.
frozen regolith simulant, which has signifi- Meanwhile the innovative concept de-
cant impact on drill forces and behaviour, veloped and tested with LUVMI has been The authors would like to acknowledge
as well as measurement characteristics. leveraged such as to extend the overall LUVMI consortium partners for the excel-
The simulant was doped with up to 5% approach into a platform that can host a lent work done in the project and the test
water and frozen to below -50 °C. After greater variety of scientific and eventually campaign performed in 2018 in the Neth-
drilling and heating with 15 W of power, even commercial payloads. This resulted in erlands.
the VA sensor readings identified water, as a new EU-project called LUVMI-Extended The LUVMI project was co-funded by the
well as small amounts of residual nitrogen (LUVMI-X). European Commission through its Horizon
and CO2. Besides enlarging the instrument pack- 2020 programme under grant agreement
Another test performed prior to the out- age with a laser induced breakdown #727220; the LUVMI-X project is co-fund-
door trials was a ‘partial gravity drilling spectroscopy (LIBS) instrument, a neutron ed by the European Commission through
test’. To validate that the required force detector (ND) and a charged particle its Horizon 2020 programme under grant
and tilting stability for drilling can be detector (CPD), LUVMI-X will be able to agreement #822018.
achieved in the reduced gravity on the accommodate a variety of payloads with
Moon (1/6th of Earth), an offloading setup standardised form factor and interfaces, About the authors: Karsten Kullack works
(pulley system) for the rover was devel- similar to the ICE Cubes facility onboard since 2004 at ESTEC. He is ESA’s System
oped and installed in Space Applications the ISS, also developed and operated by Engineer for the Electro-Magnetic Levita-
Services’ lab. It included placing the rover Space Applications Services. These cube tor (EML) on the ISS, and Team Lead of
wheels on regolith simulant, in order to size payloads can be mounted in different Engineering Services at Space Applications
have realistic friction forces when the drill locations on the rover, including the mast. Services NV. Jeremi Gancet is Technologies,
engages the ground. The test showed that Furthermore, it foresees the option of hav- Applications and Research Division Manag-
the target drill depths were achievable ing payloads dropped on the surface, or er at Space Applications Services, which he
even with an offloading level as on the even propelled (soft catapulted) into hard- joined in 2005. He is the project coordinator
lunar surface, and the rover stayed stable to-access locations of interest. In this way for LUVMI and LUVMI-X.
Ruimtevaart 2020 | 2 7
You can also read