Marine Propeller Optimization Based on a Novel Parametric Model
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Hindawi Mathematical Problems in Engineering Volume 2022, Article ID 5612793, 19 pages https://doi.org/10.1155/2022/5612793 Research Article Marine Propeller Optimization Based on a Novel Parametric Model Hao Wang , Long Zheng , and Shunhuai Chen Key Laboratory of High-Performance Ship Technology (Wuhan University of Technology), Ministry of Education, Beijing, China Correspondence should be addressed to Long Zheng; 292171@whut.edu.cn Received 17 December 2021; Revised 2 February 2022; Accepted 25 February 2022; Published 30 March 2022 Academic Editor: Benjamin Ivorra Copyright © 2022 Hao Wang et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. This paper presents a novel parametric model of marine propellers based on Non-Uniform Rational B-Splines. It involves eight parameters and five categories of spanwise parameter distributions, which are utilized for determining hydrofoil and blade shapes. 20 different hydrofoils and 5 types of well-known marine propellers are employed to detect the accuracy of the proposed parametric model. Furthermore, a propeller optimization problem was addressed with the aid of the parametric model. In the propeller optimization problem, a common AU-series propeller is treated as the baseline propeller. The proposed parametric model is used for the representation and deformation of the propeller geometric model. A hydrodynamic performance evaluation model is developed based on gene expression programming. Also, non-dominated sorting genetic algorithm II is used in the applications of the propeller optimization problem. The results demonstrate that the accuracy of the proposed parametric model satisfies the engineering requirements well, and a propeller with higher efficiency than the baseline propeller can be derived by settling the propeller optimization problem. 1. Introduction parameter model are some physical meanings, such as the diameter (D) of the propeller, the pitch ratio (P/D), and so Marine propeller is a crucial propulsion device. Its hy- on. There are a lot of commercial software programs and drodynamic performance is forcefully linked to the open-source academic software programs that can help us characteristics and the shape of its blades. With the de- generate the geometric model of propellers, including velopment of marine shipping and the concept of Energy PropCAD and PropElements from HydroComp Inc [6], Efficiency Design Index (EEDI), stringent environmental OpenProp [2, 7], and JavaProp [8]. In all of the above regulations are applied by the international and national cases, we are once again dealing with propeller models organizations to reduce the exhaust emissions from ships tightly linked to the computational procedure employed. [1]. Several researchers began to do a series of research on Modeling the geometry of a propeller is different from the ship propulsion system to reduce ship emissions and modeling other industrial objects. The blade constitutes make it adapt to this standard. The propeller as the main the so-called functional free form surface of significant equipment of the ship propulsion system will be widely complexity, and its design requires specialized procedures concerned. In this context, a method is needed to quickly both concerning its representation in a Computer-Aided and automatically generate propeller geometry models in Design (CAD) package as well as its analysis using the process of propeller optimization design. Therefore, it Computer-Aided Engineering (CAE) tools [9, 10]. is necessary to find a suitable parametric expression of Transforming a Computer-Aided Design (CAD) model propellers. Some researchers had demonstrated the need into an appropriate Computer-Aided Engineering (CAE) for parametric models [2–5]. However, most of the model is a time-consuming, labor-intensive, and costly parametric models are bound with the calculation soft- process. Therefore, in order to generate smooth and ware to a certain extent and most of the parameters in the suitable example from the parametric model directly.
2 Mathematical Problems in Engineering Arapakopoulos et al. provided two parametric models algorithm, the new propeller shape is designed to improve based on NURBS and T-splines [11]. These geometric propulsion efficiency, reduce cavitation expansion, and in- parametric models can quickly and automatically produce crease cavitation start speed while maximizing ship speed valid geometric representations of marine propellers. [23]. Gaggero proposed a simulation-based design optimi- Simultaneously, these two models can provide model zation (SBDO) tool for the design of rim-driven thrusters. instances suitable for engineering analysis following the The optimization framework consists of a parametric de- isogeometric analysis paradigm. Pérez-Arribas and Pérez- scription of the rim blade geometry and a multi-objective Fernández generated a B-Spline surface representation of optimization algorithm which makes use of the results from propeller blades while securing a reduced number of high-fidelity RANS calculations to drive the choice towards employed control points [12]. This general approach is optimal blade shapes [24]. Vesting et al. improved the implemented by the presented models and the benchmark commonly used group-based algorithms (NSGA-II and models. Herath et al. presented a layup optimization al- PSO) to be applied to marine propeller design [25]. In gorithm for composite marine propellers using Non- addition, Vesting et al. also discussed several response Uniform Rational B-Splines (NURBS)-based FEM cou- surface methods to replace the time-consuming propeller pled with real-coded genetic algorithm (GA) [13]. In performance evaluation tool. By combining the response addition, a well-responsive, smooth, and direct-use pro- surface method to fill the design space and the calculation in peller parameterized model is also very beneficial to the the local search method, a practical application method for research of propeller optimization. the minimum calculation workload was proposed [26]. In the past, the study of propellers was usually based on In addition, many scholars had also researched the experimental tests in the absence of a powerful software parameters affecting the propeller. Ghassemi et al. numer- system. With the development of the times and the con- ically discussed the effect of tip rake angle on the open water tinuous improvement of computer computing power, sev- characteristics and sound pressure level around the marine eral researchers had tried to apply optimization algorithms propeller [27]. Mahmoodi et al. used the computational fluid to propeller design. Dai et al. optimized the chord length and dynamics (CFD) data of propeller thrust, torque, and cav- blade thickness distribution to minimize the propeller mass itation volume under different influence parameters, like under the constraint of constant propeller efficiency [14]. pitch ratio (Pr), rake angle (RA) and skew angle (SA), ad- Mishima and Kinnas optimized the camber, pitch, and vance velocity ratio (J), and cavitation number (s), as inputs- chord distribution under the constraint of a constant mean outputs of GEP models to treat gene expression program- torque or constant mean power subject to a given maximum ming for forecasting the hydrodynamic performance and allowed cavity area or a maximum cavity volume velocity in cavitation volume of the marine propeller [28]. Shora et al. non-uniform flow. They also provided an option for opti- also used the above parameters as the input-output of the mum skew [15]. Their method was further improved by neural network (ANN) model to predict the hydrodynamic Griffin and Kinnas [16]. Kawakita and Hoshino optimized performance of the propeller [29]. The most notable thing is the pressure distribution in non-uniform flow [17]. Jang that Mirjalili and Zheng transformed the propeller opti- et al. optimized the pitch distribution to maximize the mization design into a 20-parameter optimization problem; propeller efficiency [18]. Takekoshi used the two-dimen- ant lion optimizer and diffusion algorithm were used in their sional wing theory and vortex lattice method to realize the research [30, 31]. This means that the number of parameters optimal design of the propeller [19]. The vortex lattice in the propeller optimization problem will no longer be a method is used to evaluate the performance and the time- limitation. dependent pressure distribution on the blade surface in a The remainder of this paper is organized as follows. non-uniform flow. The propeller efficiency was increased by Section 2 provides a brief review of the NURBS theory and 1.2% under the constraints of constant thrust and a pre- develops a novel parametric model. The accuracy of the scribed margin for surface cavitation. Zeng and Kuiper parametric model is tested and discussed in this section. In developed an optimization technique for the effective blade Section 3, the mathematical model of propeller optimization section by using a genetic algorithm [20]. Taheri and is proposed. In Section 4, a gene expression programming Mazaheri developed a propeller design method based on a model for the propeller hydrodynamic prediction tool is vortex lattice algorithm and optimized the shape and effi- constructed, and the results of the propeller optimization ciency of two propellers using gradient-based and non- and accuracy test of the GEP model are discussed. Finally, gradient-based optimization algorithms [21]. Gaggero et al. the conclusions and future research directions are given in proposed the design and the analysis of the performance of Section 5. an improved tip loaded propeller geometry [22]. Gaggero et al. solved the design problem of high-speed ship propeller 2. Parametric Model Based on NURBS by using a multi-objective numerical optimization method. By combining fast and reliable boundary element method 2.1. NURBS Parametric Representations. NURBS have been (BEM), viscous flow solver based on RANSE approximation, already extensively and successfully used in CAD industry. parameterized 3D description of blades and genetic At the same time, they are also widely used and have good
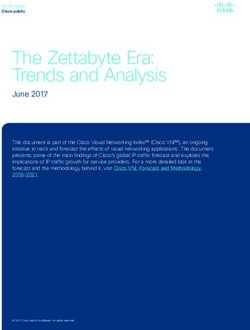
Mathematical Problems in Engineering 3 performance in the field of isogeometric analysis. Due to the complex shape of propellers, conventional Lagrange can only approximate the geometry. We use the NURBS function to replace the Lagrange for getting an analysis- suitable model. Non-Uniform Rational B-Splines were proposed by Piegl and Tiller [32]. A mth degree NURBS curve is then defined as ni�0 Ni,m (K)Ri Pi P(K) � , (1) ni�0 Ni,m (K)Ri where pi are the control points, Ri are the associated weights, and K is the knot vector. The ith B-Spline basis function is defined as Figure 1: The geometry of a marine propeller. ⎪ ⎨ 1, Ki ≤ K ≤ Ki+1 , ⎧ Ni,0 � ⎪ category as hydrofoil parameters, the second category as ⎩ 0, (else), radial parameters, and the third category as general pa- rameters. A hydrofoil generates propeller blades as shown K − Ki Ni,m−1 (K) in Figure 2. (2) Ni,m � Ki+m − Ki 2.3. Definition of Parametric Model for Hydrofoils. Ki+m+1 − K Ni+1,m−1 (K) + , m ≥ 1. Usually, we describe the shape of the propeller’s hydrofoil by Ki+m+1 − Ki+1 giving its corresponding propeller type; another way is to The function of a NURBS surface is defined as give its model such as NACA0012. As shown in Figure 3, there are two cases in which the blade profile shape is de- k k ni�0 m j�0 pij wij Ni (u)Nj (v) 1 2 termined according to the given propeller type. S(u, v) � k k , (3) The above definition method has certain limitations. ni�0 m j�0 wij Ni (u)Nj (v) 1 2 Some unusual hydrofoil shapes may be overlooked when where u and v represent the direction, k1, k2 represent the designing the propeller. In our work, the propeller blade surface’s order in u and v directions, pij and wij represent the sections are defined with the aid of an additional parametric control points and their corresponding weights, and model. The parametric model generates a closed cubic k k Ni 1 (u), Nj 2 (v) represent the B-Spline basis function in u B-Spline curve via a set of 8 parameters. All parameters use and v directions, respectively. hydrofoil’s chord length for normalization to enhance the robustness of the model, and their definitions are included in Table 1. 2.2. The Geometry and Parameters of the Propeller. A general- The assumed coordinate system’s origin is at hydrofoil’s purpose propeller consists of a hub and blades, as shown in leading-edge point and the longitudinal axis coincides with Figure 1. Generally, the following definitions are used to the chord line with the positive direction towards the trailing describe a marine propeller, the number of blades, the blade edge. Therefore, the ordinates of hydrofoil’s upper side will area ratio, the pitch ratio, the propeller type (AU and always be non-negative numbers, while the lower-side values B-series propellers), diameter, etc. can be either negative or mixed, depending on hydrofoil’s The number of blades is used to describe the number of camber. A parametric model instance with chord length blades of a propeller. The blade area ratio refers to the ratio of equal to one is depicted in Figure 4. We assume that the final the area of the extension profile of each blade of the propeller B-Spline curve starts at the leading-edge point and traverses to the area of the propeller disk. Pitch refers to the distance the hydrofoil in a clockwise direction, and then we will use of advance due to the rotation of the propeller, and pitch the 7 control points as ordered in Figure 4 and the corre- ratio is the ratio of pitch to diameter. The blade surfaces of a sponding knot vector to describe the hydrofoil. Finally, every propeller are commonly constructed through a single hy- hydrofoil instance produced by this model is a closed cubic drofoil, appropriately transformed in the spanwise direction, B-Spline curve with 7 control points, the first and last one or via multiple, differently shaped hydrofoil profiles for being coincident. different areas of the blade. By interactively modifying parameter values, this pa- The parameters of the propeller can be divided into rameter model can be used to approximate any desired three categories, one type is used to control the shape of the hydrofoil shape. Such an example is depicted in Figure 5 hydrofoil, the other is used to control the deformation of where a set of NACA0012 points are approximated by the the hydrofoil in the span direction of the propeller, and the hydrofoil parametric model using the design vector last type is used to control the overall shape of the pro- v � [0.0941, 0.4266, 0.4479, 0.0473, 0.0941, 0.4266, 0.4479, peller, such as the number of blades. We define the first 0.0473].
4 Mathematical Problems in Engineering Figure 2: Hydrofoils along the blade. (a) (b) Figure 3: Examples of specifying blade profile shape according to propeller type. (a) AU-series propeller. (b) B-series propeller. Table 1: Parameters’ definition. Nr. Name Symbol Dimensionless In the equations (9) 0 Chord length L Free ⟶ 1 1 Upper-side front edge shift length u_in_shift (0, L) ⟶ [0, 1] P1 2 Upper-side front edge in angle u_in_angle [0, π] ⟶ [0, 1] P2 3 Upper-side trailing edge shift length u_out_shift (0, L) ⟶ [0, 1] P3 4 Upper-side trailing edge out angle u_out_angle [0, π/2] ⟶ [0, 1] P4 5 Lower-side front edge shift length l_in_shift (0, L) ⟶ [0, 1] P5 6 Lower-side front edge in angle l_in_angle [−π, π/2] ⟶ [0, 1] P6 7 Lower-side trailing edge shift length l_out_shift (0, L) ⟶ [0, 1] P7 8 Lower-side trailing edge out angle l_out_angle [−π, π/2] ⟶ [0, 1] P8 0.10 P1 P2 ft u_ou 0.05 _shi t_shi u_in ft u_in_angle u_out_angle 0.00 P3 P0(P6) l_in_angle l_out_angle l_in_ ift -0.05 shift t_sh P5 P4 l_ou -0.10 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Figure 4: Hydrofoil parametric model. Y X Parmetric model instance NACA0012 POINTSET Figure 5: Approximation of NACA0012 unit chord-length profile with the hydrofoil parametric model.
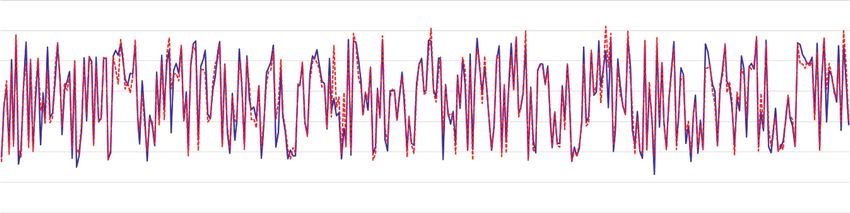
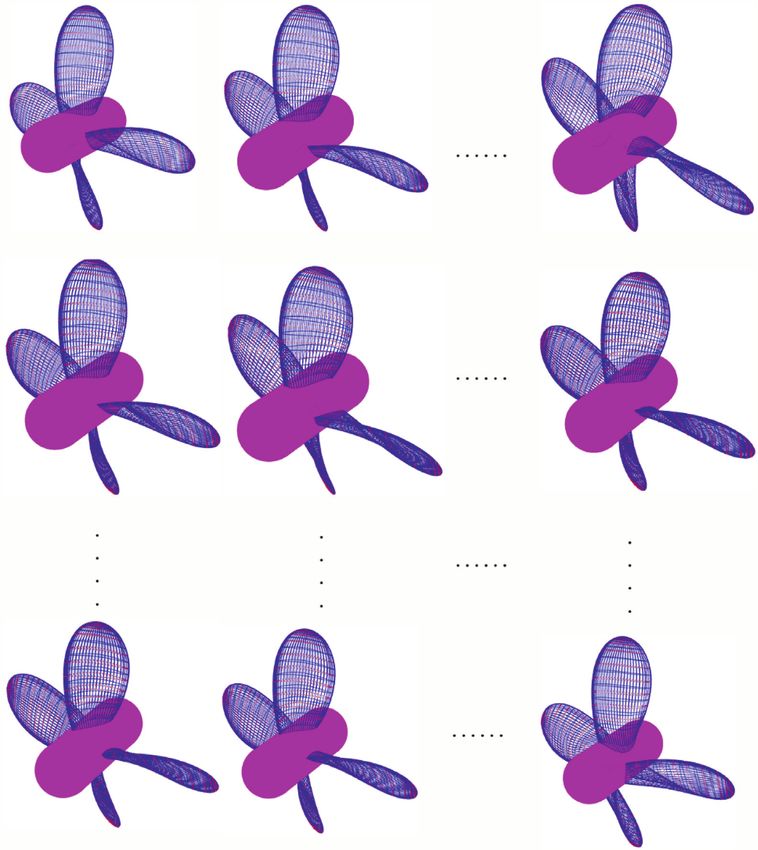
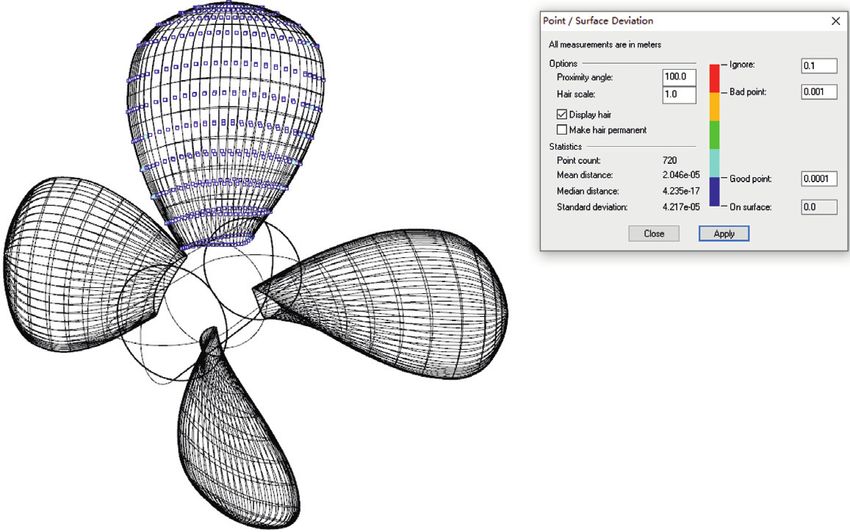
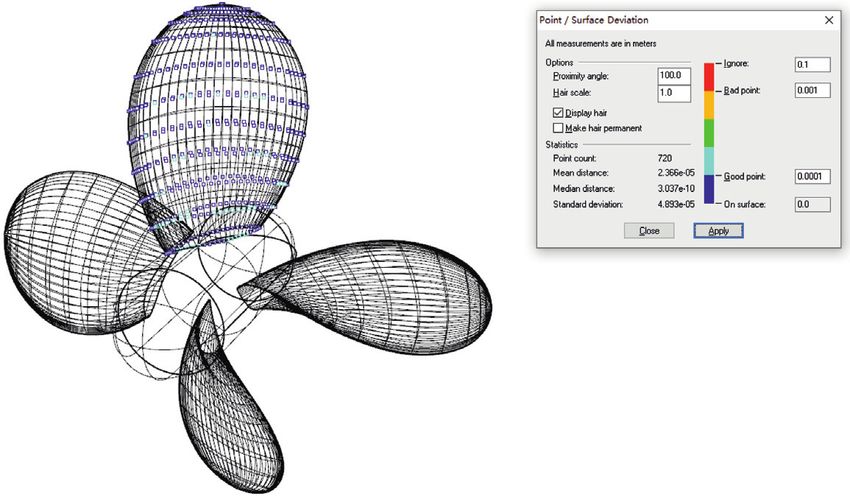
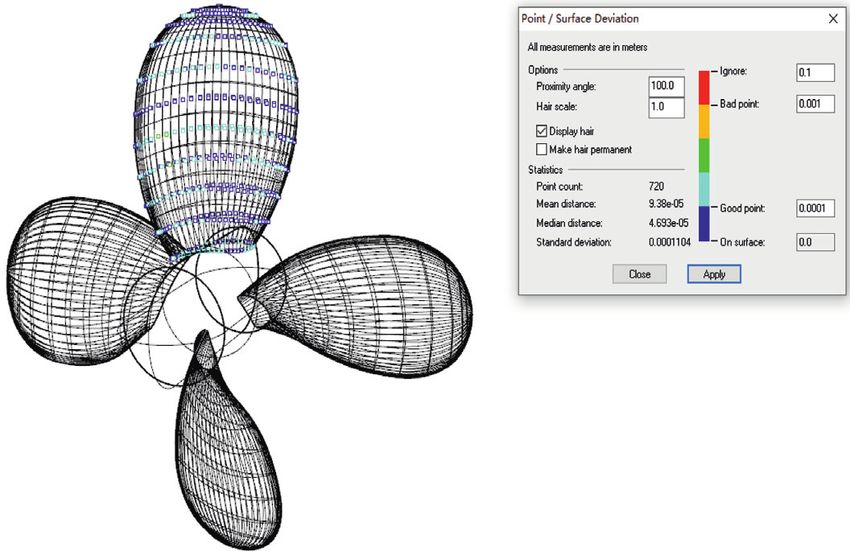
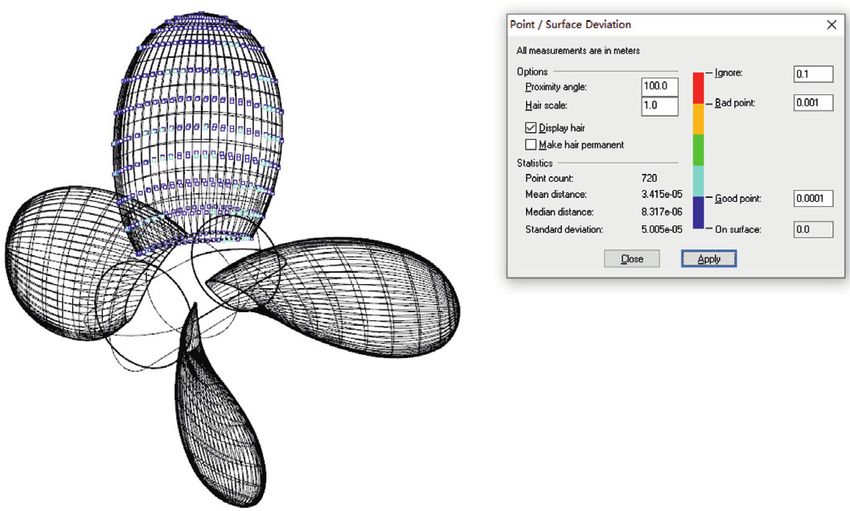
Mathematical Problems in Engineering 5 2.4. Construction of Propeller. Before building a propeller In Figure 12, we can easily get that the model-generated model, we need to define the hydrofoil parameters, radial hydrofoil has an average deviation of approximately parameters, and general parameters mentioned above. 0.0015 mm and we can hardly find any surface point devi- We can use the parametric model mentioned above to ating more than 0.002 mm. In our analysis, the basic chord generate the 2D hydrofoil shape. Then, the next step in the length we defined is 0.1 mm, so this parameter model can process is regarding the provision of general propeller pa- approximate the hydrofoil airfoil within the error range of rameters (see Table 2). 1.5%–2%. After the general parameters are specified, the radial In sequel, we demonstrate the use of the parametric parameters need to be defined. The radial parameters of models in approximating the original propeller model propeller presented collectively in Figure 6 which affect the (including B-Screw Series, AU Series, Gawn, Kaplan, and blade’s section in the spanwise direction are effectively SK). Our comparison is limited to the propeller blade which modifying the shape of the template profile along the blade. is the most complex and decisive geometrical element for the Specifically, the chord length and thickness distributions propeller’s performance. The diameter (D) and number of determine the size of each section, while the skew, rake, and blades are set to 0.25 m and 4. As for the number of sections, pitch distributions define the corresponding rotations and/ 12 are employed for the generation of AU, B series, Gawn, or translations. Typical distributions of these parameters are and SK and 10 for Kaplan. When modeling with this illustrated in Figure 6. Figure 7 depicts a series of hydrofoil parametric model, the coordinate system used in the model sections twisted and positioned along the blade’s spanwise is different from the global space coordinate system. When direction. In Figure 6, what we see are the mathematical the chord line of the profile does not coincide with the x-axis functions based on real data (the unit is meters). But our of the global coordinate, a simple rotation operation will be purpose is to achieve a propeller model based entirely on involved. NURBS, so we parameterize these distributions with simple The first thing we would like to assess is the approximation Bézier curves with four control points. An example case of level achieved by the parametric models when compared to the such distribution curve is depicted in Figure 8. We realize prototype surface blades of the five types of propellers. To this the parameterization of these distributions with the help of end, we generated points from the prototype surface blades of Grasshopper [33]. Figure 9 shows an example of all relevant the five types of propellers and compared them against the distributions after parameterization. On the basis of these corresponding sections belonging to surface blades of models. theories, we can initially generate the blade shape of the In Figure 13, we visualize the deviation about some propellers propeller. using Point set deviation. Specifically, a detailed comparison of For the compilation of the complete blade, additional deviations about Kaplan propeller in all generated sections is processing is required at the hub and tip area. We use in- included in Table 3. We present the standard deviations terpolation to refine these two parts locally. As for hub of achieved by parametric model when compared to prototype propeller, we divide the propeller hub into three parts: the blade. From these results, it can be seen that the parametric front, middle, and rear parts. In order to make the hub part model of propeller proposed by us can reach the approximate more close to the actual shape, the three parts are divided level required by engineering design. into different sections, each section is also expressed by B-Spline, and a more flexible hub geometry is obtained by rotating the two-dimensional curve. Refer to Figure 10 for 2.6. Propeller Optimization Based on Parametric Model. details. The middle part is divided into 7 sections, and the The essence of the propeller optimization problem is usually to front and rear positions are divided into 2 sections. The find a propeller with better hydrodynamic performance for a resulting surface is illustrated in Figure 11. defined operating condition, using a certain propeller as a reference (called the baseline propeller in this paper). To de- termine the geometry of the new propeller, the parameters used 2.5. Validation of the Parametric Model. To address the to describe the propeller need to be specified. The propeller accuracy of the proposed parametric model, the two-di- parametric model proposed in Section 2, as a form of propeller mensional hydrofoil and three-dimensional propeller representation, can express and reconstruct the shape of the models are evaluated. The shape of propeller is closely re- propeller with flexibility. The purpose of the propeller opti- lated to the shape of each radius section. The first thing we mization problem is to improve the hydrodynamic perfor- would like to assess is the approximation level achieved by mance of the propeller by modifying the propeller geometry, the parametric model when compared to the prototype of which includes the open water efficiency of the propeller, the blade sections (hydrofoils). The validation is depicted cavitation performance of the propeller, and the vibration noise through point set deviation. Specifically, we choose 20 hy- of the propeller. Additionally, a series of constraints such as drofoil shapes such as NACA 2421, NACA 4418, NACA strength constraints are usually specified when propeller op- 0006, etc. as samples and implement distance error (in- timization is implemented. The mathematical model of the cluding mean distance, median distance, and standard de- propeller optimization problem is expressed as follows: viation) statistics on them. The information is depicted in a graphical form in Figure 12. These hydrofoil data were max F(x) � Hydrodynamic(J, x), downloaded from https://mselig.ae.illinois.edu/ads/ (4) coordDatabase.html#n. s.t. Constraint,
6 Mathematical Problems in Engineering Table 2: Basic parameters for the construction of a generic marine propeller. Nr Name Description Symbol 1 Number of sections Number of hydrofoil sections composing the blade N 2 Right handed Direction of propeller rotation DRL 3 Hub diameter ratio Hub diameter divided by propeller diameter Rhub 4 Blades Number of propeller blades Z 5 Diameter Diameter of the propeller D 0.06 1.5 1 true value of propeller true value of propeller true value of propeller 0.05 1 0.5 0.04 0.5 0.03 0 0 0.02 -0.5 0.01 -0.5 0 -1 -1 0 0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 1 blade radial span coordinate ratio r/R blade radial span coordinate ratio r/R blade radial span coordinate ratio r/R Chord disturbition Pitch disturbition Skew disturbition 1 0.012 true value of propeller 0.01 value of propeller 0.5 0.008 0 0.006 0.004 -0.5 0.002 -1 0 0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 1 blade radial span coordinate ratio r/R blade radial span coordinate ratio r/R Rake disturbition Maxthick disturbition Figure 6: Generating distributions of radial parameters. y-axis balade rdius x-axis x-axis Figure 7: Blade sections transformed via pitch angle distribution. where x represent the parameters affecting propeller ge- 3. Results and Discussion ometry, J is the advance coefficient, Hydrodynamic(x) is the hydrodynamic function (open water efficiency, the cavita- For the propeller optimization, the AU4-40 was chosen as tion performance, and vibration noise) of the propeller, and the baseline propeller, while the propeller efficiency was Constraint represents a series of constraints. chosen as the function F(x) � Hydrodynamic(J, x) and
Mathematical Problems in Engineering 7 Max value value of root value of tip Span-wise direction Rroot Rtip Figure 8: A distribution about hydrofoil transformation along the propeller’s radius. Pitch ratio maxthickness Chord distrubition distrubition distrubition Skew distrubition Rank distrubition Figure 9: Generating distributions of radial parameters with Grasshopper. t r par r pa rt rea rea t par mid par t mid p art aft p art aft Figure 10: Hub of propeller and the details.
8 Mathematical Problems in Engineering Figure 11: Model of a marine propeller. 0.004 0.0035 0.003 Deviation (mm) 0.0025 0.002 0.0015 0.001 0.0005 0 EPPLER 557 NACA 64-108 NACA 2421 NACA 4418 NACA 0006 NACA 0008 NACA0012 NACA0010 NACA 0010-35 NACA 64-008A GOE 180 MH 9114.98% RAF-38 RAF-48 S1010 HPV S1048 USA 45 TSAGI 12% TSAGI 8% SA7035 Mean distance Median distance Standard deviation Figure 12: Graphical representation of different hydrofoils’ approximation level. (a) (b) Figure 13: Continued.

Mathematical Problems in Engineering 9
(c) (d)
Figure 13: Point-surface deviations about some propellers. (a) AU-series propeller. (b) B-series propeller. (c) Gawn propeller. (d) SK
propeller.
Table 3: Comparison of deviations about Kaplan propeller.
Position Standard deviations Chord length Standard deviations (%)
0.2r/R 0.000745 0.07871 0.9465
0.3r/R 0.0006889 0.07855 0.8770
0.4r/R 0.001292 0.07745 1.6682
0.5r/R 0.0006898 0.07381 0.9346
0.6r/R 0.0003424 0.06973 0.4910
0.7r/R 0.0006058 0.06485 0.9342
0.8r/R 0.0009579 0.0594 1.6126
0.9r/R 0.0003503 0.0534 0.6560
1.0r/R 0.0004369 0.04682 0.9331
solved using an approximate model. In this part of the symbol set (e.g.,{“+”, “−”, “×”, “÷”} or other elementary
results, the approximate model used (gene expression functions such as sin (x) and cos (x)) and terminal symbol set
programming) and its construction process are first de- (e.g., {a, b, c, −2}), while the tail can only come from the
scribed. Subsequently, the optimization results are analysed. latter. Function set, terminal set, fitness function, control
parameters, and termination condition are the major
4. Gene Expression Programming and components of a GEP model. More information about GEP
Construction Process can be found in [34, 35]. The flowchart of GEP is shown in
Figure 15.
GEP is a new evolutionary artificial intelligence technique Like most machine learning methods, the premise of
[34, 35]; GEP combines the advantages of genetic algorithm gene expression programming is to have the datasets for
(GA) [36] and genetic programming (GP). In the form of training. The datasets for the GEP model are calculated using
expression, GEP inherits the characteristics of GA’s fixed the Reynolds-averaged Navier–Stokes (RANS) method. In
length linear coding, which is simple and fast; in the gene the CFD solver, the computational domains were discretized
expression (language expression), GEP inherits the char- and solved using a finite volume method. The second-order
acteristics of GP’s flexible tree structure. However, the key upwind convection scheme was used for the momentum
difference between the three algorithms resides in the nature equations. The overall solution procedure was based on a
of the individuals: in GA, the individuals are chromosomes semi-implicit method for pressure-linked equations type
(a fixed length linear string), GP’s individuals are parse trees algorithm. The shear stress transport k-ω turbulence model
(a non-linear solid with different sizes and shapes), and in was used to predict the effects of turbulence. Mesh gener-
GEP, the individuals are encoded as linear strings of fixed ation was performed using the built-in automated meshing
length that are expressed as non-linear entities of different tool of STAR-CCM+. Trimmed hexahedral meshes were
sizes and shapes (expression trees (ETs)). An example of the used for the high-quality grid for the complex domains.
expression tree is illustrated in Figure 14. Local refinements were made for finer grids in the critical
In GEP, chromosomes are usually composed of multiple regions. These areas can be areas such as the root, middle and
genes, and then each gene is connected by a connecting slightly of the propeller such as blade edges and areas where
symbol (such as “+”, if, and so on). Each gene is composed of the tip and hub. The prism layer meshes were used for near-
head and tail. The sign of head can come from function wall refinement, and the thickness of the first layer cell on the
10 Mathematical Problems in Engineering
q rotating region is 1.2D, and the radius of the static region is
5D, as shown in Figure 16. In addition, the RANS simu-
lations is steady. In each simulation sample, 5000 iterations
*
will be carried out under each advance coefficient as the
convergence criterion.
+ – In the dataset, the same dimensionless blade profile
shape is used to construct the propeller geometric model,
which is very similar to DTMB4119 and other propellers.
a b c d
The blade profile shape of DTMB4119 is in the form of
Figure
14: Example
������������� � of expression tree (the algebraic expression is NACA66 (MOD) + a � 0.8. At the same time, this type of
(a + b) × (c − d)). propeller is very common on the trunk line of the Yangtze
River in China. Specifically, the sample is obtained by
adjusting the eight parameters of the two-dimensional hy-
Random create drofoil on the premise of keeping the other parameters of the
chromosomes of initial
population
propeller unchanged, as shown in Figure 17. The specific
values of other parameters are given in detail in Table 4.
In order to demonstrate and ensure the capability of the
Express chromosomes CFD solver, mesh uncertainty estimations are carried out
as ET with the AU4-40 propeller at J � 0.8. The details of grid size
information are listed in Table 5.
The results of the mesh uncertainties are shown in
Excute each ET Figure 18(a). In addition, Figure 18(b) provides a graph that
illustrates the comparison between experimental data [37]
and numerical results (based on the first grid environment)
for the open water characteristics of the AU-series con-
Evaluate Fitness ventional propeller. Through the comparison, we can know
that the dataset obtained by CFD simulation method is
effective. The method of the Grid Convergence Index is
adopted for discretization error estimation [38]. It can be
Iterate or terminate? Stop seen from Table 6 that the better quality of mesh is effective
in the CFD simulation.
For data mining purposes, the collected dataset size is
dependent on the complexity and degree of non-linearity of
Keep best chromosome the studied problem. The dataset used in this work contains
1170 items. The details of the dataset are presented in Table 7.
In order to build a GEP model that avoids overfitting, the
dataset is randomly categorized into two classes of training
Chromosome selection
and testing, containing 70% and 30% of the total data, re-
spectively. In this paper, GEP is used to train the propeller
efficiency model and thrust coefficient model for subsequent
Apply reproduction optimization work. The input parameters are the eight
parameters about hydrofoil and advance coefficient J as
input variables of the GEP model. The details of input-
Prepare new
chromosomes of next output variables of propeller efficiency model and thrust
generation coefficient model are presented in Table 8.
Figure 15: Flowchart of the GEP algorithm. The values of GEP parameters (like gene transposition
rate, gene recombination rate, and so on) have important
influence on the fitness of the output model. We will cor-
surface was chosen such that the y+ value is always higher relate the setting of these parameters in detail in Table 9. In
than 30. The boundary conditions of the simulations were the present paper, geppy (Gao 2019) is used to implement
selected to represent the propeller which is completely GEP models.
submerged. The computational domain consists of a sta- GEP model development consisted of five major fol-
tionary region and a rotating region. Velocity inlet boundary lowing steps:
condition was applied for the inlet free stream boundary
condition, and a pressure outlet was chosen for the outlet (1) Selecting the fitness function: in the present study,
boundary condition. The inlet and outlet were placed at 5D the RMSE is employed as fitness function.
and 10D distance from the propeller to avoid any reflections (2) Set the terminal and function sets to create the
downstream of the propeller and to ensure uniform in- chromosomes: in this work, the function set includes
coming flow upstream of the propeller. The radius of the {“+”, “−”, “×”, “÷”, “sin(x)”, “cos(x)”, “tan(x)”}.Mathematical Problems in Engineering 11 Rotation Region Pressure Outlet 10D 5D Static Region Velocit Inlet Figure 16: Domain and boundary conditions of CFD. Figure 17: Partial propeller shape for CFD calculation. Table 4: The parameters of sample propeller. Blade area Diameter (D) (m) Blades DRL Pitch (m) Number of sections ratio 0.25 4 0.4 Right hand 0.25 10
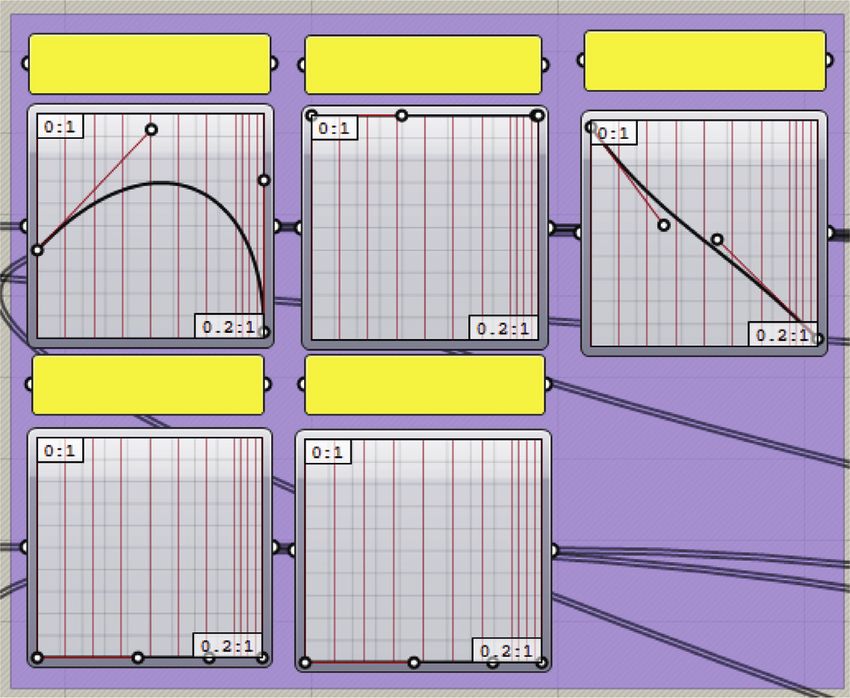
12 Mathematical Problems in Engineering Table 5: Grid size information. Item Mesh numbers 1 9496789 2 4522281 3 2441345 0.3 0.25 0.600 0.2 0.500 10KQ/KT 0.15 0.400 KT/10KQ 0.300 0.1 0.200 0.05 0.100 0 0.000 Experimental Item 1 Item 2 Item 3 J=0.2 J=0.4 J=0.6 J=0.8 J=1.0 J 10KQ KT experimental data numerical results (a) (b) Figure 18: Mesh uncertainty estimation result and comparison of CFD results and experimental data. Table 6: Calculation of discretization error of KT and 10 KQ . Item KT 10 KQ r21 1.3357 1.3357 r32 1.3369 1.3369 ∅1 0.1508 0.2642 ∅2 0.1515 0.2627 ∅3 0.1485 0.2618 P 5.0151 1.7785 ∅21ext 0.1506 0.2664 e21 a 0.464% 0.568% e21 ext 0.142% 0.836% GCI21 fine 0.177% 1.054% Table 7: The description of the dataset. Nr. Count Mean Std min max J 1170 0.4000 0.1415 0.2000 0.6000 u_in_angle 1170 0.2459 0.1468 0.0023 0.5000 u_in_shift 1170 0.2496 0.1419 0.0023 0.4990 u_out_angle 1170 0.2129 0.1661 -0.1103 0.4990 u_out_shift 1170 0.2787 0.1459 0.0007 0.5278 l_in_angle 1170 0.2534 0.1405 0.0018 0.4966 l_in_shift 1170 0.2317 0.1432 0.0016 0.5000 l_out_angle 1170 0.2004 0.1640 -0.1090 0.5000 l_out_shift 1170 0.2440 0.1443 0.0038 0.4986 (3) The architecture of the chromosomes including head 5. GEP Model Result size and the number of genes per chromosomes are selected. In this section, four statistical error criterion measures are used to evaluate the performance of the model. The root (4) Choosing the linking function. mean square error (RMSE), mean absolute error (MAE), (5) Selecting genetic operators including mutation, in- mean squared error (MSE), and also the coefficient of de- version, transposition, and recombination. termination (R2) are calculated as follows:
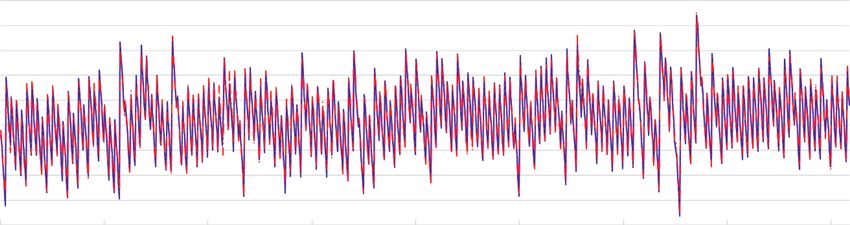
Mathematical Problems in Engineering 13 Table 8: Input and output variables of the GEP model. 2 ni�1 (Teta0 − Teta0)(Peta0 − Peta0) Item Variable Unit R2 � , (8) ni�1 (Teta0 − Teta0)2 ni�1 (Peta0 − Peta0)2 J - u_in_shift M where n is the total number of datasets, Teta0 and Peta0 are u_in_angle deg the true and predicted values, respectively, and Teta0 and u_out_shift M Peta0 are the average values. u_out_angle deg Input The results of proposed models for the dataset (including l_in_shift M l_in_angle deg training and testing data) are presented in Table 10. Fig- l_out_shift M ures 19 and 20 show the performance of the efficiency model l_out_angle deg and the thrust model, respectively. u_in_shift M From the result of Table 10 and Figures 19 and 20, the Efficiency — R2’s value of GEP model is above 0.9 in both the test set and Output Thrust coefficient — the training set. In addition, the model can perform well in the test set, and the model does not appear to be overfitting. The GEP model can find out the relationship between input Table 9: The parameters applied in the GEP model. and output variables. In other words, our GEP model is a Efficiency Thrust coefficient response surface model with good performance, which can GEP parameters be used to replace the time-consuming propeller perfor- model model Number of genes 2 2 mance evaluation tool. Head size 60 60 Mutation rate 0.05 0.08 6. Discussion of Optimization Inversion rate 0.1 0.12 Insertion sequence (IS) rate 0.1 0.1 As mentioned above, the AU4-40 was chosen as the baseline Root insertion sequence(RIS) propeller, while the propeller efficiency was chosen as the 0.1 0.1 function F(x) � Hy dr o dy namic(J, x). Propeller oper- transposition rate Gene transposition rate 0.1 0.1 ating conditions are usually variable. We will optimize the One-point recombination rate 0.3 0.35 efficiency of one propeller at multiple advance speeds. Two-point recombination rate 0.2 0.2 Specifically, in the case of J � 0.2, 0.4, and 0.6, the optimi- Gene recombination rate 0.1 0.13 zation problem with 3 optimization objectives is carried out. Size of population 150 150 In addition, other parameters were kept consistent with the number of generations 1000 1000 baseline propeller AU4-40 in the selection of optimization Linking function “+” “+” variables. To investigate the significance of the proposed Fitness function RMSE RMSE hydrofoil parametric model in propeller optimization ap- ������������������ plications, the blade section shape of the propeller is con- sidered as the optimization variable. As for the constraints, 1 n we hope that the thrust of the propeller after the im- RMSE � (Teta0 − Peta0)2 , (5) n i�1 provement of the baseline propeller should be consistent with the thrust of the baseline propeller and meet the re- quirements of China Classification Society (CCS) for pro- 1 n peller strength, and thus the whole propeller optimization MAE � |Teta0 − Peta0|, (6) n i�1 mathematical model is summarized as equation (9). The whole optimization process is depicted in a graphical form in 1 n Figure 21. MSE � (Teta0 − Peta0)2 . (7) Suppose: X � [P1, P2, P3, P4, P5, P6, P7, P8]. n i�1 Maximize : f 1 (x) � η0 (0.2, X), f 2 (x) � η0 (0.4, X), f 3 (x) � η0 (0.6, X), y y s t. Kot1 � Kt1 Kot2 � Kt2 · · · · · · Kotn � Kytn , (9) thickness ≥ thickness in regulation, where X represent the parameters of the parametric model, should be noted that the objectives under each working η0 is the efficiency, Kot is the thrust coefficient of the op- condition are equally important. y timized propeller, and Kt is the thrust coefficient of the We use the non-dominated sorting genetic algorithm to original propeller. Thickness in regulation meets the solve the optimization problem. The initial population “Regulations for Classification and Construction of Sea- number is 500, and the evolution algebra is 2000 genera- Going Steel Ships” issued by China Classification Society. It tions. Non-dominated sorting genetic algorithm is a classic
14 Mathematical Problems in Engineering Table 10: The accuracy assessments for the dataset. Item Data RMSE MAE MSE R2 Total data 0.031 0.022 0.00097 0.94 Efficiency model Training data 0.028 0.021 0.00081 0.94 Test data 0.033 0.023 0.00107 0.93 Total data 0.006 0.005 3.7E − 05 0.98 Thrust coefficient model Training data 0.006 0.005 3.7E − 05 0.98 Test data 0.007 0.006 3.9E − 05 0.97 0.8 0.6 Efficiency 0.4 0.2 0 1 51 101 151 201 251 301 351 401 451 501 551 601 651 701 751 801 Dataset number CFD value GEP value (a) 0.7 0.6 0.5 Efficiency 0.4 0.3 0.2 0.1 0 1 51 101 151 201 251 301 Dataset number CFD value GEP value (b) Figure 19: Comparison between the CFD result and GEP result of efficiency model. (a) Training data. (b) Test data. 0.45 0.4 0.35 Thrust coefficient 0.3 0.25 0.2 0.15 0.1 0.05 0 1 51 101 151 201 251 301 351 401 451 501 551 601 651 701 751 801 Dataset number CFD value GEP value (a) Figure 20: Continued.
Mathematical Problems in Engineering 15 0.4 Thrust coefficient 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 1 51 101 151 201 251 301 351 Dataset number CFD value GEP value (b) Figure 20: Comparison between the CFD result and GEP result of thrust coefficient model. (a) Training data. (b) Test data. Preparing data with python Grasshopper tool Shell command Pandas JAVA macro file of STAR- CCM+ GEP layer Optimization Show prope End layer ller Figure 21: Optimized environment architecture diagram. and effective optimization algorithm, which can effectively coefficient of each indicator needs to be specified. The in- avoid falling into local optimal solutions. At the end of it- dicators in here are the advance coefficient J � [0.2, 0.4, 0.6] eration, the results are summarized in a compact manner, as and the weight coefficient w � [0.2, 0.3, 0.5]. The open water shown in Figure 22, from which we can see that the Pareto efficiency is obtained by open water simulation based on the front is relatively clear. Reynolds-averaged Navier–Stokes (RANS) method. In order to verify the validity of the optimization results, The geometric parameters of the optimized blade profile the TOPSIS (Technique for Order of Preference by Similarity are given in Table 11 and visualized in Figure 23. The to Ideal Solution) [39] method is utilized to select an op- pressure distribution of this propeller under the different timized blade profile in the Pareto front. Also, the open advance speed condition is shown in Figures 24 and 25. In water efficiency of the propeller with the optimized blade Figure 26, the performance comparison between the opti- profile is compared with AU4-40 propeller. It is worth mized propeller and the AU4-40 propeller is given. The D mentioning here that the pitch, area ratio, rake, and skew of value in Figure 26 is the difference between the efficiency of the propeller with optimized blade profile and the AU4-40 the optimized propeller and the AU4-40 propeller. It can be propeller are consistent for ensuring the validity of com- seen that the value of KT has hardly changed, and the parison. When using the TOPSIS method, the weight performance of the propeller with optimized blade profile is
16 Mathematical Problems in Engineering 0.580 0.582 0.584 J=0.6 Efficiency 0.586 0.588 0.590 0.592 0.594 0.596 0.598 0.436 0.260 0.438 0.255 0.440 0.250 0.442 0.245 0.444 cy J=0. ien 2 Ef 0.240 0.235 0.446 Effic ficie .4 ncy J=0 Pareto front Figure 22: Pareto front for the optimization. Table 11: The parameters of the optimized hydrofoil. Item Value u_in_shift 0.302 u_in_angle 0.168 u_out_shift 0.155 u_out_angle 0.124 l_in_shift 0.179 l_in_angle -0.308 l_out_shift 0.400 l_out_angle 0.053 Thickness Direction Chord Direction Au propeller 0.6r/R Optmizeted propeller 0.6r/R Figure 23: The comparison between optimized hydrofoil and the baseline hydrofoil (x-axis coincides with the chord direction). 20000. 6000.0 Static Pressure (Pa) -8000.0 -22000. -36000. -50000. J = 0.2 J = 0.4 J = 0.6 Figure 24: The pressure distribution of optimized propeller suction side.
Mathematical Problems in Engineering 17 20000. 6000.0 Static Pressure (Pa) -8000.0 -22000. -36000. -50000. J = 0.2 J = 0.4 J = 0.6 Figure 25: The pressure distribution of optimized propeller pressure side. 0.7 2.50 0.6 2.00 0.5 1.50 D -Value (%) 0.4 Efficiency 0.3 1.00 0.2 0.50 0.1 0 0.00 J=0.2 J=0.4 J=0.6 D-Value prototype propeller KT optimized propeller KT prototype propeller Efficiency optimized propeller Efficiency Figure 26: The comparison between optimized propeller and the baseline propeller. better than that of the AU4-40 propeller. The open water the template hydrofoil profile is constructed with fewer efficiency increases by 1.52% when J � 0.2, 1.9% when J � 0.4, parameters, and then the template hydrofoil profile is copied and 2.16% when J � 0.6. This means that the proposed and transformed along the spanwise direction according to a parametric model and GEP model are effective for propeller series of distribution rules defined by radial parameters. optimization. These distribution rules describe the scaling, rotation, and In this propeller optimization case, we choose one type translation of the template hydrofoil which correspond to of AU4-40 propeller with a pitch ratio of 1 as the baseline the distribution of chord length, thickness, pitch, rake angle, propeller. The purpose is to improve the open water effi- and skew. Through the parametric expression of several ciency by modifying the propeller blade section shape while existing marine propellers (AU Series, Wageningen B-Screw keeping the same area ratio and pitch ratio. If a new type of Series, Gawn, Kaplan, and SK), its accuracy is evaluated by propeller with better open water efficiency is found with one the level of approximation that can be achieved when pa- disc ratio and one pitch ratio, it means that new propeller rameterized. It has been demonstrated that the model can open water mapping information can be provided by per- quickly and automatically produce valid geometric repre- forming open water experiments with different areas and sentations of marine propellers, mainly blade surfaces, based pitch ratios. on a small set of geometrically and physically meaningful parameters. However, for some special hydrofoil shape, the 7. Conclusions proposed parameter model may have certain limitations. This will also be our future work. Moreover, with the help of In this work, we have presented a geometric parametric the proposed parametric model, we solve a propeller opti- model. In the whole process of propeller parameterization, mization problem. In the propeller optimization problem,
18 Mathematical Problems in Engineering the GEP model is used to construct an approximate model [11] A. Arapakopoulos, R. Polichshuk, Z. Segizbayev, S. Ospanov, for the hydrodynamic calculation of the propeller. By A. I. Ginnis, and K. V. Kostas, “Parametric models for marine analysing the constructed GEP model, the model can better propellers,” Ocean Engineering, vol. 192, Article ID 106595, provide an approximate model similar to the response 2019. surface model. Also, for the optimization results, the final [12] F Pérez-Arribas and R Pérez-Fernández, “A b-spline design obtained propeller shows good performance in terms of model for propeller blades,” Advances in Engineering Soft- ware, vol. 118, pp. 35–44, 2018. efficiency compared to the base propeller. This means that [13] M. T. Herath, S. Natarajan, B. G. Prusty, and N. S. John, the parametric model proposed in this paper can play a “Isogeometric analysis and Genetic Algorithm for shape- certain role in solving the propeller optimization problem. adaptive composite marine propellers,” Computer Methods in For future work, the consideration of cavitation will be Applied Mechanics and Engineering, vol. 284, pp. 835–860, added into the propeller optimization based on the GEP 2015. model. In addition, the proposed approach can be developed [14] C. Dai, S. Hambric, L. Mulvihill, S. S. Tong, and D. J. Powell, and improved to solve marine propeller design problems. “A prototype marine propulsion design tool using artificial intelligence and numerical optimization techniques,” Trans, SNAME, vol. 102, pp. 57–69, 1994. Data Availability [15] S. Mishima and S. A. Kinnas, “Application of a numerical The data used to support the findings of this study are in- optimization technique to the design of cavitating propellers cluded within the article. in nonuniform flow,” Journal of Ship Research, vol. 41, no. 02, pp. 93–107, 1997. [16] P. E. Griffin and S. A. Kinnas, “A design method for high- Conflicts of Interest speed propulsor blades,” Journal of Fluids Engineering, vol. 120, no. 3, pp. 556–562, 1998. The authors declare that they have no conflicts of interest. [17] C. Kawakita and T. Hoshino, “Design system of marine propellers with new blade sections,” in Proceedings of the 22nd Symposium on Naval Hydrodynamics, pp. 110–126, Academic Acknowledgments Press, Washington, DC, USA, August 1998. This study was supported by the Green Intelligent Inland [18] T. S. Jang, T. Kinoshita, and H. Yamaguchi, “A new functional Ship Innovation Program. optimization method applied to the pitch distribution of a marine propeller,” Journal of Marine Science and Technology, vol. 6, no. 1, pp. 23–30, 2001. References [19] Y. Takekoshi, T. Kawamura, H. Yamaguchi et al., “Study on the design of propeller blade sections using the optimization [1] T. M. C. Ventura and S. Guedes, “A nonlinear optimization algorithm,” Journal of Marine Science and Technology, vol. 10, tool to simulate a marine propulsion system for ship con- no. 2, pp. 70–81, 2005. ceptual design,” Ocean Engineering, vol. 210, Article ID [20] Z.-b. Zeng and G. Kuiper, “Blade section design of marine 107417, 2020. propellers with maximum cavitation inception speed,” [2] B. Epps, J. Chalfant, R. Kimball, A. Techet, K. Flood, and Journal of Hydrodynamics, vol. 24, no. 1, pp. 65–75, 2012. C. Chryssostomidis, “Openprop: an open-source parametric [21] R. Taheri and K. Mazaheri, “Hydrodynamic optimization of design and analysis tool for propellers,” in Proceedings of the marine propeller using gradient and non-gradient-based al- 2009 Grand Challenges in Modeling & Simulation Conference, gorithms,” Acta Polytech Hung, vol. 10, no. 3, pp. 221–237, pp. 104–111, GCMS ’09, Society for Modeling & Simulation 2013. International, Vista, CA, July 2009, URL. [22] S. Gaggero, J. Gonzalez-Adalid, and M. P. Sobrino, “Design [3] B. Epps and R. Kimball, “Unified rotor lifting line theory,” and analysis of a new generation of CLT propellers,” Applied Ship Res, vol. 57, no. 4, pp. 1–21, 2013. Ocean Research, vol. 59, pp. 424–450, 2016. [4] D. Calcagni, F. Salvatore, G. Bernardini, and M. Miozzi, [23] S. Gaggero, G. Tani, D. Villa et al., “Efficient and multi-ob- “Automated marine propeller design combining hydrody- namics models and neural networks,” in Proceedings of the jective cavitating propeller optimization: an application to a First International Symposium on Fishing Vessel Energy Ef- high-speed craft,” Applied Ocean Research, vol. 64, pp. 31–57, ficiency, pp. 18–20, Vigo, Spain, January 2010. 2017. [5] S. Mirjalili, A. Lewis, and S. A. M. Mirjalili, “Multi-objective [24] S. Gaggero, “Numerical design of a RIM-driven thruster using optimisation of marine propellers,” International Conference a RANS-based optimization approach,” Applied Ocean Re- On Computational Science, vol. 51, 2015. search, vol. 94, Article ID 101941, 2020. [6] H. Inc, “Propeller design,” URL, 2019. [25] F. Vesting, R. Gustafsson, and R. E. Bensow, “Development [7] B. Epps and R. Kimball, “Openprop v3: open-source software and application of optimisation algorithms for propeller for the design and analysis of marine propellers and hori- design,” Ship Technology Research, vol. 63, no. 1, pp. 50–69, zontal-axis turbines,” URL, 2013. 2016. [8] H. Martin, “Javaprop - design and analysis of propellers,” [26] F. Vesting and R. E. Bensow, “On surrogate methods in URL, 2018. propeller optimisation,” Ocean Engineering, vol. 88, [9] D. R. Smith and J. E. Slater, “The geometry of marine pro- pp. 214–227, 2014. pellers,” Tech. Rep., Defence Research Establishment Atlantic [27] H. Ghassemi, M. Gorji, and J. Mohammadi, “Effect of tip rake Dartmouth, Nova Scotia, Canada, 1988. angle on the hydrodynamic characteristics and sound pres- [10] J. Carlton, Marine Propellers and Propulsion, Butterworth- sure level around the marine propeller,” Ships and Offshore Heinemann, Oxford, UK, 2012. Structures, vol. 13, no. 7, pp. 759–768, 2018.
Mathematical Problems in Engineering 19 [28] K. Mahmoodi, H. Ghassemi, H. Nowruzi, and M. M. Shora, “Prediction of the hydrodynamic performance and cavitation volume of the marine propeller using gene expression pro- gramming,” Ships and Offshore Structures, vol. 14, no. 7, pp. 723–736, 2019. [29] M. M. Shora, M. M. Ghassemi, and H. Nowruzi, “Using computational fluid dynamic and artificial neural networks to predict the performance and cavitation volume of a propeller under different geometrical and physical characteristics,” Journal of Marine Engineering & Technology, vol. 17, no. 2, pp. 59–84, 2018. [30] M. Seyedali, “The Ant lion optimizer,” Advances in Engi- neering Software, vol. 83, pp. 80–98, 2015. [31] L. Zheng, S. Chen, and H. Wang, “High-efficiency optimi- zation design of marine propeller based on p-system diffusion algorithm and parameter model,” in Proceedings of the 31st International Ocean and Polar Engineering Conference, ISOPE 2021, Rhodes, Greece, June 2021. [32] L. Piegl and W. Tiller, The Nurbs Book, Springer-Verlag, Berlin, Germany, second. edition, 1997. [33] Inc., Grosshopper. URL, 2021. [34] C. Ferreira, L. N. D. Castro and F. J. V. Zuben, Gene ex- pression programming and the evolution of computer pro- grams,” in Recent Developments in Biologically Inspired Computing, pp. 82–103, Idea Group Publishing, Pennsylvania, 2004. [35] C. Ferreira, Gene Expression Programming: Mathematical Modeling by an Artificial Intelligence, Springer, New York, USA, 2nd ed. edition, 2006. [36] M. Mitchell, An Introduction to Genetic Algorithms, MIT- Press, Cambridge, USA, 1996. [37] A. Yazaki, E. Kuramochi, and T. Kumasaki, “Open water test series with modified au-type four-bladed propeller models,” Journal of Zosen Kiokai, vol. 1960, no. 108, pp. 99–104, 1960. [38] I. B. Celik, U. Ghia, P. J. Roache, C. J. Freitas, H. Coleman, and P. E. Raad, “Procedure for estimation and reporting ofun- certainty due to discretization in CFD applications,” Journal of Fluids Engineering, vol. 130, pp. 1–4, 2008. [39] H. S. Shih, H. J. Shyur, and E. S. Lee, “An extension of TOPSIS for group decision making,” Mathematical and Computer Modelling, vol. 45, no. 7, pp. 801–813, 2007.
You can also read