Auto motion Next Level - Automated Driving at IAV
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

auto motion IAV Customer Magazine | 03/2019 Next Level Automated Driving at IAV

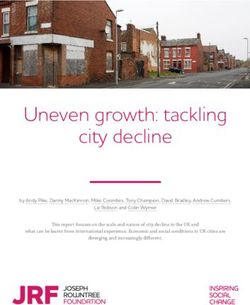
There are five levels
automotion | Editorial 3
to the self-driving vehicle.
We explain what they mean. Dear Reader
For a while now, the HEAT is on in Hamburg! But this is not because multilayer architecture that divides the system into a comfort
of an unusual heat wave. Instead, an autonomous electric shuttle layer and an active safety layer. Please turn to the report on page
is becoming the center of attention in Hamburg’s HafenCity. 12 for more details.
HEAT (Hamburg Electric Autonomous Transportation) was devel- Climate protection is currently one of the dominating topics
Subline
oped by IAV in cooperation with partners such as Hamburger Hoch- of political debate. One thing is quite sure: the mobility sector
bahn AG, Hamburg’s Departmental Authority for Economic Affairs, also has to make a contribution to reducing CO2 emissions. But the
Transport and Innovation (BWVI), Siemens Mobility GmbH, the best way of doing this should remain an open issue for discussion
Institute for Climate Protection, Energy and Mobility (IKEM) and in each specific application. For example, the use of hydrogen
the German Aerospace Center (DLR). The project wants to prove and synthetic fuels must be given due consideration as another
that autonomous minibuses can be fully integrated in the road interesting option alongside battery electric vehicles. Dr. Joachim
traffic and local public transport service of a big city. A three-week Damasky from the VDA and Matthias Kratzsch, President and
test phase in August was a great success. The next step will be CTO at IAV, discuss these topics in the automotion interview
following already in February 2020, with HEAT running autono- from page 24.
mously through the HafenCity at maximum speeds of up to 25
kilometers per hour. You can find out more about the project Other topics in this issue: failure analysis of mechanical parts
in this issue of automotion from page 8 as part of our topic focus (page 30), new strategies to prevent cyber attacks on vehicles
“Automated Driving”. (page 32), strategic planning for electric distribution grids (page 38)
and putting AI methods into practice (page 40).
Safety is one of the greatest challenges for autonomous vehicles
such as HEAT. IAV’s safety concept works with a functional We wish you some interesting reading.
Level 1 Level 2 Level 3 Level 4 Level 5
DRIVER PARTIAL CONDITIONAL HIGH FULL
ASSISTANCE AUTOMATION AUTOMATION AUTOMATION AUTOMATION
Assist systems The car performs The driver can The vehicle can the passengers. With or without
such as adaptive individual tasks for delegate simple, cope with highly If the passengers passengers, from
cruise control the driver, such defined tasks complex driving do not react, the now on the vehicle
(ACC) help the as unassisted completely to the situations and vehicle achieves a drives from A to B
driver deal with parking, keeping vehicle for a longer drives on its own. safe status on its completely on its
road traffic. But in lane or braking period of time. The driver own, by stopping, own. It no longer
the driver retains and accelerating in The car can tell the becomes a for example. At the has a steering
responsibility traffic congestion. driver to take back passenger, who moment, there is wheel. Passengers Dr. Ulrich Eichhorn Matthias Kratzsch Katja Ziegler Kai-Stefan Linnenkohl
and control. The driver moni- control again at can but does not no legal clarity as are not liable for President, CEO President, CTO President, CFO President, CHRO
tors the car and short notice. Here have to take the to who assumes damage. However, IAV GmbH IAV GmbH IAV GmbH IAV GmbH
is responsible. again, the driver steering wheel. responsibility for up to now it has not
is responsible for When dangerous any damage when been clarified who
everything that situations occur, the car is driving will then be liable
happens. the vehicle warns on its own. for any damages.
4 Contents | automotion automotion | Contents 5
30 Diagnostics for components
IAV specialists scrutinize mechanical
components in detailed failure analyses
6 Next Level
Automated driving at IAV
32
Editorial 3 Trends No safety without security
24 Topic focus
Next Level 6
Digital Ants as an Efficient Means
of Improving Power Grids
Transferring AI Methods
to Practice
38
40
Joint research project with HAW Hamburg
and easycore GmbH: detecting and
averting attacks on vehicle fleets
The HEAT is on 8
First autonomous shuttle bus
Changing track
in Hamburg 10
Making autonomous driving safe 12 Frightened of Innovation? 42
Automation pioneers 14 Digital ants as an efficient means
of improving power grids
About IAV
38
Researching, promoting and connecting 16
IAV has a solution to support the strategic
Three-shift day in the
planning of distribution grids which fulfill
Berlin Himalayas 44
Driving forces all the demands made of a modern energy
Equal partners 46 supply system
Keeping an eye on the eyes 22
New test benches for electromobility 48
“Now’s the time to take decisions” 24
Expert student know-how
Optimized for the fleet, at the Hockenheimring 50
customizable or every model 28
Back to the future 4.0 52
Diagnostics for Components 30
IAV live and in color! 53
No safety without security 32
Our engineering portfolio 54
46
Project Kick-off with
the Software Campus 34 Our product portfolio 56
“Now’s the time to take decisions” Equal partners
Hack Attack at IAV 35 IAV’s diary: let’s meet? 58
Dialogue between Dr. Joachim Damasky, Managing Director Technology and DEKRA and IAV cooperate on automotive
the Environment from the German Association of the Automotive Industry (VDA), Components in Permanent Stress 36 Publisher information 59 EMC testing
and Matthias Kratzsch, Chief Technical Officer on the IAV management board
6 Topic focus | automotion automotion | Topic focus 7
PERCEPTION
V2X-COMMUNICATION
Intelligent algorithms
Avoiding congestion, use information from the
reducing journey times, energy- vehicle's radar, lidar sensors
efficient driving: V2X communication and cameras for real-time
connects vehicles with each other calculation of the ideal
and with the infrastructure to share driving maneuvers.
information, for example
about traffic congestion
or weather data.
ACTIVE SAFETY LAYER
Next Level To warrant safety in autonomous
driving, IAV advocates a functional
multilayer architecture that divides
the system into a comfort layer
Automated Driving at IAV and an active safety layer.
COOPERATIVE DRIVING
Vehicles and infrastructure share
information and interact with each
other. It is thus possible to avoid
or mitigate critical situations,
OPTICAL COMMUNICATION
by changing lane or merging
with flowing traffic.
Vehicle and traffic data
are transferred by light waves,
for example between trucks: this is
a eavesdrop secure method that is
immune to interferences and also
has a high data flow rate.
VALET PARKING
The driver gets out of the car
and starts autonomous parking:
the vehicle drives to a free
parking space and parks
on its own.
8 Topic focus | automotion automotion | Topic focus 9
The HEAT is on
Successful first test run for the autonomous minibus HEAT
in Hamburg‘s HafenCity
D
uring a three-week test period, Distance traveled: 1.84 km
Number of stops 5
the autonomous minibus built by Vehicle parked and recharged at: Wärme Hamburg
IAV and partners that goes by the Number of traffic lights 6
Number of intersections 9
project name of HEAT (Hamburg Electric
Autonomous Transportation) was put
through its paces on public roads in the
city of Hamburg. All expectations in terms New bus stop
of performance and safety were fulfilled Existing bus stop
in the course of the test. At the moment, Electric charging station
the vehicle is being prepared for the next Lane change and special traffic signal required
stage: in February, it is to operate in a
larger area at higher speed.
lidar sensors had been fitted to roadside us a great deal in a highly dynamic setting”,
During the first three weeks of August, HEAT masts by project partner Siemens for wire- says Lemke. “Apart from the fact that this
was put through its paces in Hamburg’s less transmission of the measured values was a densely built-up area, other challeng-
HafenCity at speeds of up to max. 15 kilo- to the vehicle. “This gave HEAT a better idea es included the many road users who didn’t
meters per hour. “We had to comply with of what to expect at upcoming junctions, always abide by the rules of the road, includ-
a defined small circuit round a block of in order to adapt the driving strategy ing fast, flexible e-scooters.” The minibus
houses as we have to apply for a permit accordingly”, explains Lemke. was fitted with video cameras to register as
for autonomous driving on specific route many of these traffic situations as possible.
sections”, reports Veit Lemke, Executive A vehicle attendant was on board at all times The recordings are now being used in
Project Manager at IAV and HEAT project during this early test phase and could have simulations for further improvements to
leader. The minibus receives data not only triggered an emergency stop at any time HEAT’s autonomous driving functions. All
from its own onboard sensors but also from to bring the vehicle to a standstill. HEAT’s personal data such as registration plates
the surrounding infrastructure: radar and passengers consisted of development and faces are rendered unrecognizable for and had to revert to an emergency stop. has been tried and tested on the roads for “We are a group of partners working
engineers from IAV, tasked with monitoring privacy reasons. Autonomous driving de- In future, the vehicle attendant can inter- many years now”; says Dr. Manfred Kraus, towards a shared aim: to operate an auto-
the technical systems as well as drawing pends on precise positioning of the vehicle. vene in the steering even in automated Head of Product Development for Chassis mated minibus in urban traffic for the first
conclusions from how the vehicle per- “We need accuracy of 10 centimeters, so mode.” Specially trained passengers will be Systems at Schaeffler Paravan Technolo- time”, says Schmidt. “As far as future mobil-
formed for subsequent journeys and for that GPS alone is not adequate”, explains taken on board HEAT for the first time during gies. “We can make reference to the sys- ity is concerned, solutions like this are
the next development stage. “All those on Lemke. “During the three-week test, we the next test phase. Every time the vehicle tems operating for many millions of kilom- particularly interesting for the last mile”. The
the demonstration journeys were surprised recorded a high-resolution map of the is upgraded, it has to be inspected again by eters, an important factor in the homologa- HEAT project also provides valuable in-
at how unusual it is to ride in an autonomous area to include the position of landmarks the technical inspection company Dekra, tion process.” The company’s contribution sights into the mobility value chain, with IAV
vehicle, and were also amazed at all the such as road signs or hard shoulders.” with renewed approval necessary from to the next HEAT generation comprises a acquiring the expertise to develop autono-
meticulous care that had gone into the the authorities. Only then is HEAT allowed new rolling chassis including the drive, mous vehicles and also to operate them if
entire development”, reports Stefan At the moment, IAV is preparing the HEAT back on the roads, fitted with a regular steering, brake, shock absorbers and wheel necessary. HEAT will be making a grand
Schmidt, Executive Vice President of the minibus for the next test phase. In February registration plate. suspension. This will be available from the appearance at the ITS World Congress in
Project Management Office at IAV. “But we 2020 the plan is for it to operate in a larger second quarter of 2020, allowing the mini- October 2021: the intention is for it to run
all felt completely safe after next-to-no area at speeds of up to maximum 25 kilom- Proven solution for drive-by-wire bus to turn its wheels through 90 degrees through the HafenCity in automated mode
time, and all the more determined to make eters per hour. In addition to the necessary and also turn on the spot. “The whole project at speeds of up to 50 kilometers per hour.
the project a success.” software updates, new components will One of IAV’s partners on the HEAT project is extremely exciting for us because we’re
also be added for this purpose: “For exam- is Schaeffler Paravan Technologies (SPT). creating something completely new”, says Contact:
Many lessons learned in ple, an improved joystick by our partner The world market leader for car solutions Dr. Kraus. “Up to now, no-one else has man- veit.lemke@iav.de
a dynamic setting Schaeffler Paravan Technologies (SPT) equipped for the disabled produced the aged to drive an automated minibus with stefan.schmidt@iav.de
will be fitted for manual driving”, says triple redundant drive-by-wire technology Level 4 SAE on public roads at speeds of up
The experiences gained will also have a Lemke. “Up to now, we had no possibility that controls the minibus’s brakes and to 50 kilometers per hour. What we’re doing
contribution to make. “The test has taught of manually evading a hazard situation steering. “This is a validated technology that here is clearly pointing the way forward.”
10 Topic focus | automotion automotion | Topic focus 11
First Autonomous Shuttle Bus
in Hamburg
The HEAT research project aims to integrate the vehicle in regular road traffic
Project partners
and their tasks
W
e say welcome to HEAT (Ham- offering ideal conditions for industrial The HOCHBAHN control center monitors stops used by HVV vehicles and two new Supported by:
burg Electric Autonomous experts and scientists to put their ideas to actual operation and gives the vehicle com- bus stops set up specially for HEAT.
Transportation), the new mini- the test. At the ITS World Congress 2021, mands and instructions, depending on the • City of Hamburg – BWVI:
bus at the heart of a unique R&D project we will use HEAT and many other projects prevailing traffic situation; in any critical The gradual approach has also been delib- Traffic planning by the LSBG
in Germany! It measures five meters in to show the world that Hamburg is a pioneer situation, control center staff can trigger an erately chosen for the route itself to gain (State Office for Roads, Bridges
length, weighs 4.5 tons, has an electric for innovative mobility solutions.” emergency stop and communicate with the experience during the individual phases, based on a decision of the German Bundestag and Waterways), implementation
drive with practically zero emissions and passengers. The control center also sends in order to proceed with a subsequent and operation of necessary
should start operating in Hamburg’s One key feature of the HEAT project is the the timetable and the currently planned step-by-step increase in route length, infrastructure systems by HHVA
HafenCity with space for up to ten passen- gradual approach. The first phase consist- route to the shuttle. automation level and vehicle speed. The (Hamburg Transport Facilities), with
gers as from mid 2020. The youngest ed of tests without passengers on a defined scope and gradual development of the the Department for the Interior and
member of the HOCHBAHN fleet should test route, with a professional vehicle atten- Before test operations could begin, approv- tests will be geared to warrant maximum Sport (State Transport Authority)
run in automated mode. Information pro- dant on board to intervene immediately if al had to be obtained to put a totally new safety at all times, as stipulated in the safeguarding the legal prerequisites.
vided by the roadside infrastructure and needed. The first passengers should then vehicle on the road, equipped with com- homologation process.
the control center ensures the shuttle be taken on board from mid 2020, together pletely new components and managing • HOCHBAHN:
finds it way safely on the test route. At the with the vehicle attendant who will still be entirely without many conventional ele- The main focus of the HEAT project is Consortium leader for the project,
same time, the shuttle also transmits present at that point. Completely autono- ments such as steering wheel and outside on the human aspect, looking at the needs administrative and functional
information to the control center. mous operation (without vehicle attendant) mirrors. A gradual approach also applies to of the people for whom the new option of leadership and coordination of
should then be implemented pursuant the homologation side of the project, with an autonomous bus has been devised. the whole project (supported
The HEAT research and development pro- to SAE Level 4 by the time the ITS World permits and approvals being obtained step It should make it as easy and pleasant as by hySOLUTIONS), operational
ject is breaking absolutely new ground with Congress takes place in October 2021. by step throughout the project. Permission possible for them to use the vehicle, in concept and practical operation
an ambitious target: the intention is to as- for the August tests was received mid July. combination with a high feeling of safety. of the autonomous buses
certain and verify that autonomous mini- The minibus developed by IAV has current- The DLR (German Aerospace Center) is the
buses can be fully integrated in a big city’s ly been approved for ten passengers. It has The necessary legal support for the HEAT project partner responsible for accompa- • IAV GmbH:
road traffic and local public transport ser- two benches with four seats each together project comes from the IKEM (Institute for nying research which includes analyzing Vehicle development and
vice. The HEAT vehicle is being tested under with a folding bench with two seats. It also Climate Protection, Energy and Mobility) user requirements to obtain input about the implementation; vehicle-related
real-life conditions on public roads, with the has a ramp for disabled access. The batter- which is also dealing with the resulting design of the vehicles and the transport development of the technology
aim of achieving speeds of up to 50 kilo- ies for the electric powertrain are recharged requirements for the vehicle and the infra- service they provide. Other aspects of involved in autonomous driving
meters per hour driving autonomously. by Vattenfall in the HafenCity. structure, and for regular operation with accompanying research include evaluating
passengers. The special aspect of auton- passenger acceptance and examining • Siemens Mobility GmbH:
On presenting the vehicle, Michael West- In addition to the specially developed omous driving is that the technology in the interaction between the system and other Concept and on-going development
hagemann, Hamburg’s Senator for Eco- vehicle itself, the research project will be vehicle has to perform all the driver’s tasks road users in the test area of Hamburg’s of the roadside infrastructure for
nomic Affairs, Transport and Innovation, focusing above all on issues of traffic and in terms of complying with the traffic rules. HafenCity. the necessary control center
emphasized: “HEAT offers the city a chance IT infrastructure, digital control technology
to pursue research into every single facet and the technical interfaces. The intention The test route in Hamburg’s HafenCity • IKEM – Institute for Climate
of automated and connected driving. Our is for the vehicle to be integrated in real road will be altogether 1.8 kilometers long. Protection, Energy and Mobility:
absolute priority is safety! A key factor traffic so that it has to be able to travel at In contrast to the initial plans, the route had Study of new operator and
for future use of autonomous vehicles speeds of up to maximum 50 km/h. To this to be shortened to take account of major business models, legal support
is that people have to accept them. The end, it has to be fitted with cameras, radar construction work being carried out in the for the permission and
cross-manufacturer test route for automat- and lidar, while the additional smart road- HafenCity, but this has no impact on the homologation processes
ed driving and the autonomous shuttle side infrastructure consists among others research and development results of the
www.hochbahn.de/heat • DLR (German Aerospace Center):
clearly demonstrate that we in Hamburg of sensor elements and digital communi- project. The minibus will serve altogether
want to explore new mobility concepts, cation systems. five bus stops, including three regular bus Accompanying research
12 Topic focus | automotion automotion | Topic focus 13
Making Autonomous Driving Safe
In normal operation, the system is in the Multilayer architecture allows The distinct approaches can also result
state of comfortable driving, with the differentiated development in different process models for the comfort
comfort layer in control of the system. In a and the active safety layer. The active
critical traffic situation, the active safety “The multilayer architecture helps to fulfill the safety layer uses the waterfall model to
layer takes control of the vehicle and brings high demands placed on automated driving take account of the high safety require-
it back to a safe state, for example with a functions while limiting the development ments in terms of design and implementa-
New software architecture addresses the challenges braking or avoidance maneuver. Once the effort to a reasonable level”, says Dr. Roland tion. By contrast, the comfort layer can be
situation has been mitigated, the system developed with agile methods for a swifter
in making autonomous driving safe can switch back to comfortable driving.
Kallweit, Head of the Predictive Safety De-
response to trends and customer requests
partment at IAV. The different layers make it
and to make functional enhancements
observable more quickly.
critical damage unavoidable, safe state after damage
driving situation safe state unreachable has occurred
“New development methods and adequate
design patterns will become increasingly
increasing criticality important for autonomous driving in order
to cope with the huge complexity involved.
comfortable avoidance of damage minimization Our task in research and development
driving critical situations prevention of damage
is to give the right answers”, says Dr.
Matthias Butenuth, Senior Vice President
comfort layer active safety layer
for Automated Driving Systems at IAV.
The behavior of the active safety layer possible to focus on the individual develop-
depends on the specific situation. An avoid- ment: critical scenarios have no longer to be
ance maneuver can make sense when regarded for the comfort layer, while comfort
Vehicle-in-the-Loop
traveling at high speed on the motorway. In requirements need not be taken into account
this case, it is important to check whether in the active safety layer. All in all, this sim-
this is possible by using a free adjancent
Real-world driving situations
plifies matters with two leaner development
lane or even by remaining in the current
combined with virtual scenes
processes that integrate the appropriate
lane. If an autonomous shuttle in urban development methods in each case.
The Vehicle-in-the-Loop method
traffic is considered, an emergency break
(ViL) combines simulations with
is in many cases better in mitigating “Among others, we rely on innovative
the real vehicle for designing and
complex scenarios, because there is often development methods such as Vehicle-in-
validating functions. A physical
insufficient space for other maneuvers. the-Loop to take the complex, safety-
vehicle drives in a real test
Such complex scenarios can involve critical scenarios for the active safety
environment, which is enhanced
different road users and also embarking layer into account”, explains Paul Prescher,
by virtual objects. Augmented
and disembarking passengers. Team Leader for predictive safety at IAV.
reality in the vehicle makes the
virtual objects visible for the
test driver.
The method is ideal particularly
for scenarios that are too complex
I
or too dangerous for testing with
n an abrupt danger situation, the right despite the high safety requirements.
real road users. These can include
decision to prevent an accident has to “Safety and accident-free driving are comfort layer
situations with high speeds or
be taken in no more than a fraction of a among the biggest tasks in the develop- sensors actuators
oncoming traffic. ViL thus allows
second. People do this intuitively on the ment of our systems. We have designed active safety layer for reproducible and resource-
basis of their experience. Autonomous a comprehensive safety concept working
saving testing of risky scenarios
vehicles will have to do the same thing in cross-divisional projects”, explains
without any danger.
just as well. Dr. Ulrich Bauer, development engineer
for predictive safety at IAV. The comfort layer ensures convenient
There are many diverse challenges involved execution of the respective automated
in developing autonomous systems. On the IAV’s safety concept driving task, from passing through an urban
one hand, the systems must guarantee junction to driving on the motorway. By Contact:
safety and accident-free driving. On the To warrant the safety of autonomous driv- contrast, the active safety layer intervenes ulrich.bauer@iav.de
other hand, the development process ing, IAV relies on a multilayer architecture in cases of acute emergency and reacts matthias.butenuth@iav.de
for increasingly complex functions up to that divides the system into a comfort appropriately to the particular hazard by roland.kallweit@iav.de
validation has to remain manageable, layer and an active safety layer. heavily reducing the comfort requirements. paul.prescher@iav.de
14 Topic focus | automotion automotion | Topic focus 15
Automation Pioneers “We notice that projects like HEAT need a
new approach before complex functions
such as those needed for autonomous
development scopes and the necessary
test mileage would result in unrealistically
long development times and costs.
assessing corner cases. In the early devel-
opment stage, simulation-based validation
methods such as Concept-in-the-Loop or
driving can make the transition from Vehicle-in-the-Loop help to define valid
research to volume production. We’re Integrative overall requirements and the processes for safe
breaking new ground; the automotive development process deign of Safety of the Intended Function
Simulation-based algorithm development and validation for autonomous driving world hasn’t had to deal with this (SOTIF) and functional safety. Model-in-
as integrated process before. Established conventional methods The best way of keeping the workload the-Loop helps with algorithm develop-
are simply no longer enough” says Dr. within reasonable limits is to use different ment based on rapid prototyping and early
Matthias Butenuth, Senior Vice President virtual methods throughout the entire validation of the technical solutions.
T
for Automated Driving Systems at IAV. development process, from specifying
he autonomous minibus named passengers at speeds of up to 50 km/h on test autonomous driving on public roads.
the functions through to validating their Scene-based development and
HEAT has started to go through public roads without a driver. The research The development of connected autono-
Autonomous driving systems have to fulfill implementation. validation
testing in Hamburg’s HafenCity. The and development project by IAV and other mous vehicles such as HEAT presents
stringent requirements in terms of safety,
aim of the ambitious project is to transport partners is one of the first in the world to the engineers with new, high demands.
reliability, robustness and availability. The “We need methods and processes to obtain Appropriate use of virtual methods through-
insights in a virtual space which can then out the whole process with the generation
be used in every phase. One key question of compatible results depends on defining
is how can the results of the various meth- scenarios and models in advance that
ods be made transferable? We’ve still got a can be used in all development phases.
good way to go, but autonomous driving Examples here include overtaking another
systems will never reach the level of man- vehicle or turning right at traffic lights when
ufacturing readiness without this kind there is a cycling lane. The set of relevant
of process”, explains Thorsten Scheibe, scenarios and corresponding parameters
Head of the Simulation & Validation Depart- continues to be specified throughout the
ment at IAV. The only way to reduce the real course of the development process, thus
mileage and the share of complex methods, achieving a very high level of maturity. The
keeping the engineering workload altogeth- scenarios are kept in a special scenario
er on a realistic scale, is if the results can be database that is accessible to the various
transferred between development steps virtual methods.
and methods, and incorporated in the
overall development. Virtual models
HEAT as process prototype Real-world circumstances are emulated
in simulations by abstracting them in mod-
For HEAT, IAV has developed a correspond- els, such as models of sensors to visualize
ing concept that continues to be defined their function and system behavior or road
and implemented in the course of the user behavior models. Model complexity
project. The IAV concept builds on various can be adapted to the goals of the devel-
modules: opment phase and to the method being
used in each case. The model is readjusted
• simulation-based methods, during the development process on the
• scene-based development and basis of specific performance indicators
validation, and and statistical methods.
• virtual models.
The models are also kept in a central mod-
These modules must be put together el database in an abstract description form
intelligently and integrated holistically in and can be used with various simulation
the overall development process. For this tools. “Our aim is to automate the entire
to happen, interfaces and workflows must development process, including final vali-
be defined and standards observed. dation. No standard exists for this up to now.
The HEAT project offers us the great oppor-
Methodical diversity tunity to define and test the concept, which
makes us pioneers”, says Butenuth.
Virtual methods are involved in every phase:
more abstract methods are used for vali- Contact:
dating and narrowing down large parameter matthias.butenuth@iav.de
spaces, and more complex methods for thorsten.scheibe@iav.de
16 Topic focus | automotion automotion | Topic focus 17
Researching, Promoting and Conne cting
Research projects help to build up know-how and foster cross-sectoral networks
W
hat are the major questions, Project duration: Partners: BMW AG, Fraunhofer-Gesellschaft The aim of the project is to automate mobility behavior and urban transport
challenges and problems of our October 2016 to October 2019 e.V., Institute for Connected Mobility (IVM), recurrent journeys in known areas and, tasks, the research project PAVE (Potential
time? Which disciplines and https://www.synchrone-mobilitaet.de/ MUGLER AG, Noritel Mobile Kommunikation in particular, to present solutions for coop- of automated traffic systems) aims:
specialist fields are relevant? Which GmbH, Preh Car Connect GmbH, Chemnitz erative maneuvers in such areas. To this • to develop visions for future forms
partnerships and collaborations are University of Technology, Dresden University end, the project partners are working at of behavior and organization based
promising? Together with partners from of Technology, Vodafone GmbH implementation in an application-oriented on autonomous vehicles
science and industry, IAV develops solu- AULA test site. The overriding goals of the project • to derive requirements for the vehicles
tions that will shape the world of tomorrow Funded by: for implementation in real-world vehicles • to discover new forms of organization
and the day after. Autonomous electric vehicles with auto- Federal Ministry of Transport and Digital include: and services
matic charging technology Infrastructure (BMVI) • Creating standard software frame- • to estimate and assess their impact
Research and development projects works for the varying requirements in terms of the traffic system,
that bring together partners from different Over the next few years, we can expect HarmonizeDD Project duration: of highly automated driving environment and safety.
disciplines and sectors often generate new to see driverless cars and minibuses being April 2017 to October 2019 • Transferring know-how and algorithms
findings about important or particularly used as taxis in a number of cities through- Automation and connectivity in mixed https://www.synchrone-mobilitaet.de/ from aerospace to highly automated A market model is used to analyze what kind
topical issues. “For IAV, participating in out the world. For environmental and urban traffic driving, as well as defining the require- of performance will be possible in a system
research projects makes an important con- sustainability reasons, these vehicles are ments for modern satellite navigation for automated connected driving, which
tribution to sustainable further develop- to be driven by purely electric powertrains. The HarmonizeDD project aims to address • Developing efficient AI algorithms for needs and demands will arise and which
ment of pioneering topics”, says Michael One particular challenge to be addressed the diverse reciprocal disruptions in mixed highly automated driving. kinds of systems, services and vehicles
Aengenheister, coordinator for R&D pro- for fully automated operation of these urban traffic with novel functions and servic- are likely to meet with the broadest levels
jects at IAV. “The know-how generated dur- e-taxis entails completely automatic re- es for automated and conventional vehicles. IAV has assumed project responsibility of acceptance.
ing research projects works to our benefit charging of the battery without someone Widespread basic services are provided by for decision-making, (model-based) move-
in orders for our customers; new sectors having to intervene manually. a cellular telephony and edge cloud solution. ment planning and (model-based) driving IAV’s task in the PAVE project is to provide
profit from our engineering and technology Additional cloud solutions in roadside units dynamics control. content-related and methodical support in
know-how with solutions for the entire The AULA project intends to achieve signif- are used for an extended range of functions elaborating future visions of automated
mobility ecosystem”, says Aengenheister. icant technical progress in the core aspects on certain corridors. The vehicles themselves Partners: driving, and to support the development
IAV is currently involved in more than 40 of automatic driving functions, quick charg- are equipped with new interaction mecha- OPA3L University of Bremen, Bundeswehr Univer- of requirements for vehicles and systems.
R&D projects. ing systems and automated recharging nisms that make it possible for these servic- sity Munich, ANavS GmbH, IAV GmbH
of vehicles, resulting in products ready es to be used in both automated and non- Optimally assisted, highly automated,
Automated driving is one of the big topics for volume production and the official automated vehicles. The solutions have been autonomous and cooperative vehicle Funded by: Partners:
of current research and development. homologation process for the participating tested in experiments at the Dresden digital navigation and localization Federal Ministry for Economic Affairs and International Academy Berlin for Innovative
IAV is working with various partners in project partners. test site (Saxony). Energy (BMWi) Pedagogy (INA), Psychology and Econom-
the framework the following state-funded OPA3L focuses on transferring aerospace ics, Robert Bosch GmbH, Berlin University
projects. The overall aim of AULA is to develop a IAV has developed new vehicle functions know-how to the field of highly automated Project duration: of Technology, Otto von Guericke Univer-
fully automatic electric passenger car with for cooperative automated driving in mixed driving so that this can be used for Mobility March 2019 to February 2023 sity Magdeburg
functionally reliable and fully automatic quick urban traffic. One particular focus comprises 4.0 in Germany. The key contents consist-
charging in the semi-public environment decision mechanisms for interacting with ing of autonomous planning and navigation Funded by:
without user intervention, as well as develop- road users on differing automation and as well as trajectory optimization and Federal Ministry of Transport and Digital
ing near-production software and hardware connectivity levels, using among others the control form the basis for application in PAVE Infrastructure (BMVI)
components for the vehicle, the contact mobile and roadside unit cloud services. The autonomous vehicles. OPA3L builds on
system and the related safety systems. resulting functional sample parts have been the previous funded project “AO Car” with Potential of automated traffic systems Project duration:
integrated in test vehicles in order to test and IAV participation, extending the research October 2018 to December 2020
Partners: Fraunhofer Institute for Transpor- evaluate them together with the other part- questions to real-life application scenarios Significant changes in mobility behavior, https://www.bmvi.de/SharedDocs/DE/
tation and Infrastructure Systems, IAV GmbH ners during test drives in real road traffic. with the involvement of partners from mobility organization and traffic organiza- Artikel/DG/AVF-projekte/pave.html
industry. The necessary navigation system tion must be expected in the new future.
Funded by: The project is embedded in Saxony’s initiative includes, in particular, the important This will result in new business models and
SAB Sächsische AufbauBank called “Synchronous mobility 2023: Intelli- aspects of localization, ideal routing and new challenges in both individual traffic and
(Development Bank of Saxony) gent transport systems in Saxony”. active control. in freight transport. Referring to today’s
automotion | Topic focus 19
From Assistance to Automation
What we develop moves you.
Partners: vehicles should also provide information
A step ahead with active safety and intelligent functions. We have been driving forward the vision of highly auto- Fraunhofer Institute for Transportation and about free on-street parking spaces and
mated driving and developing distributed functions and complete systems from concept to start of production Infrastructure Systems (IVI), NXP Semicon- recognize certain objects such as street-
for over two decades. As one of the leading development partners to the automotive industry, IAV offers more ductors Germany GmbH, MUGLER AG, lamps or road signs, updating their position
than 35 years of experience and a range of skills second to none. With our expertise in the entire vehicle, and Institute for Connected Mobility (IVM), where appropriate.
the passion to match, we provide technically perfected solutions. Employing 7,000 members of staff and first- TechniSat Digital GmbH, dresden elektron-
class facilities, we assist manufacturers and suppliers in carrying out their projects wherever they are in the REMAS ik verkehrstechnik gmbh, FSD Fahrzeugsys- In this project, IAV was responsible for
world – from driving environment sensor systems and algorithms to simulation and vehicle integration: temdaten GmbH, Chemnitz University of communication between vehicles and
Your targets are our mission. Resource management system for highly Technology, Professorship for Communi- backend and for backend updating of the
automated urban transport cations Engineering, Dresden University of maps. Other focal aspects of IAV’s work
To find out more and discover our unrivaled wealth of expertise, go to www.iav.com Technology, Chair of Vehicle Mechatronics included V2X communication for sharing
When it comes to the automotive sector, and Chair of Transport Systems Information hazard warnings and infrastructure com-
traffic engineering, information and com- Technology, IAV GmbH munication between vehicle and traffic
munication technology as well as informa- lights using 802.11p technology (Wi-Fi).
tion science, a large number of highly Funded by:
complex requirements have to be met. The SAB Sächsische AufbauBank Partners: Berlin’s Senate Department for
development activities of many players (Development Bank of Saxony) Environment, Transportation and Climate
from all these areas have to be combined, Protection, Hella Aglaia Mobile Vision
with joint simulation and testing of the Project duration: GmbH, IAV GmbH, Daimler Center for Auto-
resulting solutions. September 2015 to August 2019 motive Information Technology Innovations
https://www.synchrone-mobilitaet.de/ (DCAITI), Fraunhofer Institute for Open
The resources involved have to be ade- Communication Systems (FOKUS), Free
quately pooled and managed in the inter- University of Berlin, Senate Department for
ests of an interdisciplinary combination Economic Affairs, Energy and Business,
of such development activities as well Reinickendorf District Administration,
as resulting validation measures in test SAFARI Deutsche Telekom
corridors. The REMAS project addresses
this challenge, creating the scientific basis Safe automated and connected driving Funded by:
in the context of highly automated urban with self-updating maps at the test site in Federal Ministry of Transport and Digital
traffic. This includes methods for integrat- Berlin Reinickendorf Infrastructure (BMVI)
ing such resources with a new simulation
middleware, for the support and real-time The objective of this project consists in Project duration:
coordination of test drives and driving the development and practical validation June 2017 to June 2019
maneuvers as well as monitoring critical of how automated and connected vehicles www.testfeld-berlin.de
system attributes. An innovative informa- interact with a cooperative infrastructure.
tion model is the core of a cooperation plat- The focus is on high-precision and self-
form that is connected up to the real-world updating digital maps, with input from the
traffic system, as well as the tools, vehicles vehicles and smartphones.
and components involved in the develop-
ment process. The central approach of SAFARI presumes
that most errors are systematic and can
Technology analyses revealed that further be experienced, learnt and predicted by
progress is necessary above all in the field automated and connected vehicles. Chang-
of intelligent transport systems. Technolog- es in the street setting, such as roadworks
ical advantages can be achieved by integrat- or cars parked on the road, are detected
ing resource management systems, driver immediately and forwarded to all connect-
assist functions and system development. ed vehicles in the area. The connected20 Topic focus | automotion
SecVI SYNCAR
Security for Vehicular Information – Partners: Automated Urban Driving
security architecture for vehicle networks Hamburg University of Applied Sciences
(HAW), easycore GmbH, IAV GmbH The aim of the SYNCAR project is to devel-
For autonomous driving, innovative driver op new solutions for predictive, automated
assist systems have to be provided with all Funded by: driving in cooperative communication with
the necessary information. The increasing Federal Ministry of Education and Research other road users and traffic light systems.
connectivity of vehicles and infrastructure (BMBF) Among others, this has resulted in a new
opens up new attack scenarios for unau- way of optimizing traffic flow by providing
thorized access to data and programs. Project duration: specific targeted maneuver recommenda-
Security solutions are therefore constant- April 2018 to March 2021 tions for certain vehicle groups or also
ly competing with attack technologies. http://secvi.inet.haw-hamburg.de/ individual vehicles.
Test the Fun
Averting such attacks is key for protecting
the vehicles, their systems, the gathered Besides leading the consortium project,
data and also for protecting all road users. IAV has also been involved in developing
new functions for highly automated driving,
The project partners want to develop a including methods for predictive driving,
of Driving
robust, low-complexity network architec- cooperative communication of driving
ture for monitoring the security of the infor- behavior with the environment and consid-
mation flow in the control areas of the vehi- eration of maneuver recommendations.
cle on various levels and to protect against
attacks. The new network architecture Partners:
should be harmonized with the existing dresden elektronik verkehrstechnik gmbh,
communication technologies in the vehicle. Fraunhofer Institute for Transportation and
Even if the robust network architecture elim- Infrastructure Systems, FSD Fahrzeugsys-
inates many attack patterns, it is still neces- temdaten GmbH, FusionSystems GmbH,
sary to detect attacks and threats as soon Preh Car Connect GmbH, Chemnitz Univer-
as possible and to react swiftly with corre- sity of Technology, Dresden University of
sponding security updates. To this end, new Technology, IAV GmbH
add-on functions are developed, building
Get involved today in testing the technologies of tomorrow!
on the basis of the existing vehicle-specific Funded by:
components. The new functions are also SAB Sächsische AufbauBank
supplemented by the cloud infrastructure (Development Bank of Saxony)
of the vehicle manufacturer for prompt im-
porting of updates for a whole vehicle fleet. Project duration: Do you fancy doing something really exciting? Become part of the mobile
September 2016 to August 2019 future! Look forward to unique adventures with virtual reality (VR) and Register now and
Working on the basis of real-life application https://www.synchrone-mobilitaet.de/ augmented reality (AR). We offer exclusive insights into the automotive become a tester:
data, the project develops procedures and de/projekte/syncar.html industry and the future of mobility.
www.ready2test.de
evaluates them in a demonstration vehicle
You will of course be remunerated for your efforts.
to make autonomous driving much safer.22 Driving forces | automotion automotion | Driving forces 23
Keeping an Eye on the Eyes
Put through their paces: IAV tests the functions of new infotainment systems according to the stipulations made by NHTSA and JAMA
M
any serious accidents are caused IAV’s UX Lab in Gifhorn is equipped with a tion (NHTSA), because more than 3,166 test persons see an American road scene Set of test persons compiled by IAV
by inattentive drivers. The Amer- driving simulator that observes precisely people in the USA were killed by inattentive including the lane markings and road signs Ready2Test
ican National Highway Traffic what the driver sees. Test persons at the car drivers in 2017 alone. used in the USA. They wear an eye-tracking Selecting the test persons is strictly regu-
Safety Administration (NHTSA) and the simulator make a contribution to improving device with two cameras to record their lated: there must be twelve men and twelve
Automotive technology is growing
Japanese Automobile Manufacturers As- road safety. To be more precise, a life-size New infotainment systems therefore have eye movements and another camera to film women. In each case. The NHTSA demands
increasingly complex. What does
sociation (JAMA) therefore make precise vehicle test model enables the engineers to pass the NHTSA test before they can be their field of vision. “This shows us exactly three people each aged 18 to 24, 25 to 39,
the perfect combination of design,
stipulations for the functions of infotain- to see whether operating the infotainment launched on the USA market. To this end, how long the driver looks where in various 40 to 54 and 55 years and older. All must be
ergonomics, haptics and quality look
ment systems regarding the extent to system proves to be too much of a distrac- the IAV experts at the Gifhorn simulator use cases, such as entering a phone num- in good health, they must be active drivers
like? How can mobility and communi-
which they are allowed to distract users tion for the driver who thus pays inadequate recreate a cockpit based on the manufac- ber while driving”, says Daniel Nause, engi- (at least 3,000 miles per year), experienced
cation grow together? What will
while driving. The UX Lab in Gifhorn has attention to what’s happening on the road. turer’s CAD data, which corresponds in neering psychologist at IAV. “Other typical in handling modern touch devices and, of
future operating concepts look like?
a simulator where the IAV experts check These tests are prescribed by the American ergonomic terms to the later production test cases include changing the scale of the course, not familiar with the new infotain-
To answer these questions, the
that all requirements have been met. National Highway Traffic Safety Administra- vehicle. On the screen in front of them, the map, entering the destination or scrolling ment system. IAV uses external agencies
development process has to listen
through the contacts list on the display.” to recruit the test persons as well as revert-
above all to car drivers and interested
ing to its own test person pool consisting
persons. That‘s why Ready2Test has
Precisely defined maximum of 584 employees and 464 external people
been initiated by IAV.
permitted distraction (the number continues to grow).
An infotainment system will have passed They can also take part in the tests Do I have to fulfill certain
the test if at least 21 of 24 test persons took prescribed by the Japanese Automobile prerequisites to take part?
their eyes from the road for less than twelve Manufacturers Association (JAMA), which If you are willing to experiment and
seconds during the whole process. Further- IAV also conducts in Gifhorn. In this case, enjoy getting immersed in technologi-
more, the individual distraction must last ten men and ten women are required aged cal issues, then Ready2Test is just
less than two seconds on average. And between 20 and 49 years. These tests also right for you. Anyone aged 18 years
finally, no more than 15 percent of their address the issue of how displays in the and over can take part, with or without
glances away may have lasted for longer car distract the driver. The JAMA tests a driving license.
than two seconds. All this can be recorded only use the visual occlusion goggles. The
precisely with the eye-tracking device. If a limit values differ to those specified by How does it work?
function fails the test, it will have to be the NHTSA: the headset opens the field If test persons are needed for a certain
disabled in the production vehicle. of vision for 1.5 seconds and then blocks user test, IAV sends out an e-mail
it again for one second. This pattern is invitation to the people meeting the
Occlusion testing is another test method constantly repeated and the test persons respective criteria. If you are selected,
that does not need the simulator. Instead have to complete the task in maximum 7.5 you will have to come on site to IAV for
of an eye-tracking device, in this case the seconds “open time”. They then indicate a few hours. You could be asked to do
test persons wear a headset that has a liq- on a scale of one to seven how stressed online tests or to answer a traditional
uid crystal display for either opening or they felt during the whole process. survey, or to perform tests in the
blocking the field of vision. For the NHTSA vehicle. It gets really exciting when we
test, it is set to transparent for intervals of “The NHTSA and JAMA tests help us use virtual reality (VR) and augmented
1.5 seconds. These are the time slots in to make a contribution to improving road reality (AR). Here you can experience
which the test persons have to operate the safety”, says Nause who has been dealing simulated driving situations or test a
functions of the infotainment system. Here with this issue for four years. “The tests can new head-up display. You will of course
again, the system has passed the test if be carried out in Germany or in the target be remunerated for your efforts.
at least 21 of 24 test persons manage to countries USA and Japan.” No matter where
do this in maximum twelve seconds “open the IAV simulator is being used, it keeps
time” (in addition to the closed intervals). an eye on the test person’s eyes.
Register right now as a fun
Contact: of driving tester!
daniel.nause@iav.de www.ready2test.de24 Driving forces | automotion automotion | Driving forces 25
“Now‘s the Time to Take Decisions” A
t the beginning of December 2019, Which infrastructure decisions need to time, regardless of whether the hydrogen
politics and industry exchanged be taken? is being used directly or for subsequent
views on the powertrains of the production of e-fuels.
future at the Berlin Powertrain Symposium, Damasky: Hydrogen is a central element
a conference organized by IAV in cooper- in CO2-neutral energy supply and will What role do synthetic fuels play in
ation with the VDA. Apart from the influ- play an important role in the transport achieving the climate targets?
Interview with Dr. Joachim Damasky (VDA) und Matthias Kratzsch (IAV) ence of legislative framework conditions sector from 2030, particularly for heavy
and how to deal with complexity, another duty vehicles. The German government is Damasky: In the last 20 years, the German
important issue is which energy carriers currently preparing a hydrogen master plan automotive industry has reduced the fleet
make sense alongside battery electric and is in close contact with the industry consumption of its new vehicles by 35 per-
vehicles in order to achieve climate- which will have to provide the powertrains. cent. Unfortunately, this has not generated
neutral mobility by 2050. Please read a net reduction in the carbon footprint of
below a dialogue between Dr. Joachim Kratzsch: We need carbon-neutral hydro- road traffic, due to many effects. For exam-
Damasky, Managing Director Technology gen made from eco-electricity. Up to now, ple, the level of motorization in the base year
at the German Association of the Automo- we use hydrogen made from natural gas; 1990 (the year after the Berlin Wall came
tive Industry (VDA), and Matthias Kratzsch, in Japan it’s even made from coal. We’ve down) was far lower in eastern Germany.
President and CTO at IAV. got to look at the entire energy chain and On the other hand, we face the target of
not just at what happens in the vehicle. reducing transport-related emissions by 40
Cars are currently the focus of discussions to 42 percent by the year 2030. This cannot
dealing above all with climate protection. But current legislation only pays attention be achieved by fleet renewal alone. What
How do you see this debate? to vehicle emissions. else can we do? It simply won’t be sufficient
to expand public transport services, which
Kratzsch: It’s good to have an intensive Kratzsch: Yes, that’s right. Unfortunately, are already overburdened in many cities.
debate. But it is also important that after there are still no incentives for measures Admixing renewable fuels could be part of
perusing a range of different opinions, in the to reduce the carbon footprint on the fuel the answer.
end we manage to find a shared objective side. Changing the current tank-to-wheel
that reconciles the societal, political and approach will probably not be discussed on Kratzsch: Admixing synthetic fuels could
industrial interests. Above all, it is important the European level until 2023 and possibly give us an immediate and significant CO2
to avoid factually unfounded arguments. not come into effect until 2030. We need to effect in the entire vehicle fleet. We wouldn’t
At the Berlin Powertrain Symposium, we take and implement decisions before then. have to wait for electric vehicles to gradu-
encouraged an open and fruitful exchange We also need to know if we should then view ally take over a larger share. And while the
between industry, science and politics. emissions on the well-to-wheel basis or fuels themselves are still in need of certain
take the entire life cycle analysis. development, in principle the engines are
Damasky: A consensus should be possible actually ready.
if we keep discussions on a factual level. Damasky: As far as life cycle analysis is
The objectives are clear: the automotive concerned, we must make sure it does not Further market penetration of hybrid pow-
industry subscribes to the German govern- counteract all our current efforts. Our aim ertrains would also help to reach this target.
ment’s climate targets. It’s now a case of is to ensure that the process for manufac- Basically, they themselves are a kind of “ad-
making sure that the necessary prerequi- turing batteries for electric cars is so cli- mixture”, in this case a direct admixture
sites are put in place quickly. mate-friendly that it no longer impacts on of electric energy.
the life cycle analysis. Battery recycling also
Kratzsch: In terms of climate protection, has a role to play here: we must implement Is Germany capable of producing suffi-
it is crucial to limit the absolute CO2 level a closed cycle of resources. cient quantities of hydrogen or synthetic
in the atmosphere by 2050. And the way fuels?
that we achieve this is just as important What are the arguments in favor of hydrogen
as the actual target. In a best-case as an energy carrier? Damasky: If we want to remain an industri-
scenario, we need a range of measures al country, we will continue to be dependent
that will cut CO2 emissions at very short Kratzsch: Hydrogen or hydrogen-based on energy imports in future. This is also due
notice. Bearing in mind that the average methane could be the backbone for the to the fact that our specific climate prevents
car on German roads is meanwhile nearly future energy industry. With its possibilities continuous operation of large-scale plants.
ten years old, all crucial technologies for storing regenerative energy in the long We will be well advised to start timely coop-
will have to reach manufacturing readiness term, this energy carrier can even compen- eration with countries that can offer what
at the latest in 2040 if we want climate- sate for periods without sunlight or wind. we need in this respect.
neutral fleet consumption by 2050. This
also means that now is the time to take Damasky: We need a chemical energy Kratzsch: Thinking of Germany as an indus-
the necessary decisions about the carrier other than batteries. Carbon-neutral try location, it would be very interesting
Matthias Kratzsch, President and CTO at IAV, and Dr. Joachim Damasky, Managing Director Technology at the German Association corresponding infrastructure. hydrogen production is the basis every for us to develop technologies for the
of the Automotive Industry (VDA)You can also read