Towards Optimal Heterogeneity in Lattice Structures
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Noname manuscript No.
(will be inserted by the editor)
Towards Optimal Heterogeneity in Lattice Structures
Yash Agrawal · G. K. Ananthasuresh
arXiv:2103.02047v1 [cond-mat.mtrl-sci] 22 Feb 2021
the date of receipt and acceptance should be inserted later
Abstract We present a multi-phase design parameter- 1 Introduction
ization to obtain optimized heterogeneous lattice struc-
tures. The 3D domain is discretized into a cubical grid Lattice structures fall in the category of heterogeneous
wherein each cube has eight distinct unit cell types or cellular materials composed of slender elements such as
phases. When all phases are present, the domain resem- beams and plates. They are useful for the light-weight
bles a densely connected ground structure. The cross- design of components and are manufactured using ad-
section area of beam segments in lattice units, modelled ditive manufacturing. There are many desirable prop-
using Timoshenko beam theory, are the design vari- erties of lattice structures, which include resistance to
ables. All beam segments in a particular lattice phase buckling (Clausen et al. 2016), improved thermal per-
have the same area of cross-section to keep the num- formance, enhanced strength-to-weight ratio and good
ber of design variables low. The optimization problem energy absorption characteristics (Gibson and Ashby
is formulated for stiff structures and is solved using the 1997). The seminal work by A. G. M. Michel (1904)
optimality criteria algorithm. We present a case study leads to an important learning that optimal structures
to show the superiority of topology-optimized heteroge- have a grillage pattern composed of slender compo-
neous structures over uniform lattices of a single phase. nents. There is a detail present at different levels of
In order to interpret the phase composition, we per- scales. To design such structures, we are required to
form four basic load tests on single phases, namely, ten- specify the structure at both macro- and microscales.
sion or compression, shear, bending, and torsion. The This premise is evident in various materials present
phases are ranked based on the stiffness corresponding in nature (e.g., bones and biological matter), as well
to individual loading conditions. The results show that as human-made structures (e.g., Eiffel Tower, Maria
in the optimized structure, the local internal load con- Pia bridge) (Lakes 1993; Sundaram and Ananthasuresh
figuration drives the selection of phases. We also note 2009). This is the basis for our investigation in designing
that micropolar elasticity captures the bulk behaviour multiscale materials, using topology optimization tools.
of heterogeneous lattice structures, and helps not only We restrict our scope to lattice structures comprising
to interpret the optimality of phases but also to improve circular cross-section beams, even though cross-section
the computational efficiency of the proposed optimiza- shape provides additional freedom in optimizing beams
tion technique. (Ashby 1991).
To define a general cellular structure, we need to
define the tessellation of the domain, the topology of
the unit cell, and the cross-section area i.e. size of the
individual elements (Bhate 2019). The microstructure
is the part of the structure inside a small subdivision
of the domain, usually taken to be a cube (3D) or a
M2D2 Laboratory, Mechanical Engineering, IISc Bengaluru square (2D). We define the first level of heterogeneity
E-mail: {suresh,yashagrawal}@iisc.ac.in as follows: A single microstructure repeated over all of
the spatial directions to get a porous material with a
2 Agrawal et al.
periodic structure. The bulk behaviour can be mod- etry by density-type variables, and the macrogeometry
elled using homogenization theory when the size of the using velocity field level set. A clustering approach is
unit cell size is much smaller than the size of the struc- used in (Jia et al. 2020), where the elemental strain en-
ture. When the unit cell topology is kept uniform, but ergies serve as a basis to form finite amount of clusters
the cross-section sizes of the constituting structural el- at macroscale, each cluster being assigned a distinct
ements are allowed to vary, we get to the second level unit cell, designed concurrently. The design space gen-
of heterogeneity. The size variation enriches the design erated by these techniques is similar in the sense that
space as the unit cell density can now spatially vary. In a finite number of unit cells with distinctly different
the third level of heterogeneity, the unit cell topology geometries are treated as materials, and distributed in
is allowed to vary spatially, and the cross-section size of the design domain. So far, concurrent techniques do not
the frame elements can also be varied. The exploration consider spatial density variation in the structure.
of this level is the contribution of this work. The non-concurrent approaches use predefined unit
We discuss recent attempts in design parameteriza- cell types and sometimes allow the density variation in
tion schemes to obtain structures at different levels of the subdivisions that further enriches the design space.
heterogeneity. Various unit cell geometries have been In Wang et al. (2018), two variables are employed, one
suggested by researchers, for e.g. Bhate et al. (2019). being a density variable in the classical-SIMP sense, and
Starting with the first level of heterogeneity, Robbins the second a discrete variable with distinct predefined
et al. (2016); Clausen et al. (2016) use the conventional unit cell geometries assigned. The elastic properties are
topology optimization tools to get the optimized struc- interpolated using the discrete variable. A preconceived
tures, using the homogenized material properties for parameterised level set defines the microstructure in
a single unit cell. For the second level of heterogene- Zhang et al. (2019), and the level is adjusted at different
ity, the homogenization is performed for various densi- points in the design domain to get the density variation
ties of a selected microstructure topology and material aspect in the design. Imediegwu et al. (2019) take an
interpolation is done in terms of a physically mean- exhaustive approach by establishing a elastic property
ingful density variable, or a discrete design variables. workspace with respect to the radii of various beam
Then, using a modified sensitivity analysis, the opti- segments in a 3D lattice, and then treating those radii
mization is performed and the structure is designed, as design variables. Similarly, Wang et al. (2020) use
called graded structure (Cheng et al. 2018; Zhang et al. a 5th order polynomial for fitting the elastic properties
2015; Wu et al. 2019b). One reference puts forth a novel in two variables, first a physically-meaningful density,
and interesting clustering approach, where density clus- and a second aspect ratio variable defining the unit cell
ters are formed and the unit cell is assigned based on topology. Moving away from homogenization, Liu et al.
the densities initiated from SIMP method (Kumar and (2020) model the microstructure by static condensation
Suresh 2020). Another approach improves the design method, with a physically-meaningful density variable
space by introducing a possibility of rotating the struc- and another discrete variable for microstructure defini-
ture in each subdivision, based on one of the two things: tion. The common thread in all of the techniques, ex-
principle stress/strain direction (Daynes et al. 2019), or cept Rodrigues et al. (2002), is the connectivity treat-
conforming to the outer geometry (Wu et al. 2019a). ment, and the design space. The information about con-
Coming to the schemes that address the third level nectivity is lost during homogenization, which leads to
of heterogeneity, we first discuss a few attempts that use the contiguous subdivisions having non-connecting mi-
concurrent optimization technique. The work initiated crostructures. The microstructure connectivity is en-
with Rodrigues et al. (2002), where both the micro- and sured either by a connectivity constraint, or by non-
the macrostructure are designed such that each subdi- participating design measures. Futhermore, the meth-
vision has a completely different and optimized geome- ods explored thus far do not permit more than one unit
try, using a density-based approach. In Sivapuram et al. cell type to co-exist in any and every cube of the dis-
(2016) a segregated domain is considered, with a dis- cretized domain.
tinct unit cell geometry designed for each partition, us- Our design parameterization is a non-concurrent ap-
ing a level-set approach. Deng and Chen (2017) explore proach, where the design space resembles Wang et al.
a robust design of cellular material. Each subdivision is (2020) and Liu et al. (2020), with the extension that
assigned one of a finite number of microstructures that many unit cell types are permitted to occupy a location,
are designed using discrete material optimization, and depending on the optimality of the solution. Thus, our
a combined SIMP and PAMP interpolation technique. approach is capable of giving optimal heterogeneity in
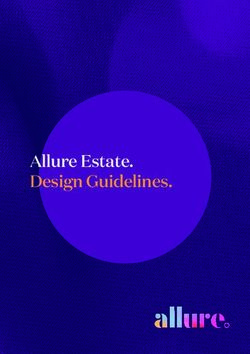
Wang and Kang (2019) presented a similar material- lattice structures. We begin by identifying eight differ-
distribution type problem, parameterizing microgeom- ent unit cell types, or phases for cubes in 3D (Figure
Towards Optimal Heterogeneity in Lattice Structures 3
(a) Phase 1 (b) Phase 2 (c) Phase 3 (d) Phase 4 (e) Phase 5 (f) Phase 6 (g) Phase 7 (h) Phase 8
Fig. 1: The eight identified phases i.e. unit cells, each shown in a different colour.
Table 1: Geometric information of the fundamental phases, i.e. unit cells
Phase Number of beam segments Beam segment length Redundancy index nk
1 12 1 4
2 24 √1 2
2
√
3
3 8 2
1
4 24 √1 2
2
1
5 24 2
2
6 12 √1 1
2
7 12 √1 1
2
1
8 6 2
1
1). They are centrosymmetric and all of the beam seg- (Rueger et al. 2019). Discrete asymptotic homogeniza-
ments in a phase have the same length (Table 1). Junc- tion (Tollenaere and Caillerie 1998) is a technique that
tions exists at corners, midpoints of edges and faces, yields the material properties for unit cells with discrete
as well as the centre of the cube. Furthermore, no two elements such as beams. Since we need to simplify the
phases share a beam segment, although they can inter- computation and preserve the physics of the system at
sect. We assign a single density parameter to each of the same time, we prefer to model the structure using
these phases such that each beam in a single phase has Timoshenko 3D frame elements (Karadeniz et al. 2013).
the same cross-section area, proportional the density We note that connectivity is guaranteed by virtue of
parameter. All eight phases are permitted to exist in the frame finite element analysis (FEA) in our procedure.
cube and hence there are eight design parameters per We do away with the extensive computations for the ho-
cube, one for each phase. When a density parameter be- mogenization and the material interpolation step. Also,
comes small, we consider that the corresponding phase the sensitivity analysis is a straightforward application
is absent in that cube. In this way, effectively 28 com- of the chain rule, is analytically exact, and there is no
binations of unit cell topologies are possible, including requirement of sensitivity filters. In this model, there is
a void. The parameterization retains the sense of den- a source of error due to the stiffening at the junctions
sity variation. When all of the phases are present, the i.e. the structure is actually stiffer than predicted. So
microstructure resembles a densely connected ground we err on the conservative side. One way to design the
structure. The cubical grid is populated with eight den- junctions is by using a convex hull approach as in Verma
sity parameters belonging to each cube, similar to Koh et al. (2020).
et al. (2005).
As there is a lot of detail in the structure, modelling We consider the problem of designing stiff struc-
with continuum elements is computationally expensive. tures by minimising the mean compliance with linear
Homogenization theory is not applicable when the unit constraints. The optimality criteria algorithm (Rozvany
cell size (a cube here) is not small enough as compared and Zhou 1991; Yin and Ananthasuresh 2001) is found
to the size of the structure. The bulk behaviour of lat- to be sufficient for this problem. In mean compliance
tice structures is better captured by micropolar elas- minimization, the volume constraint acts as the source
ticity (Lakes 1998). Scale effects have been experimen- of conflict. We also add a minimum porosity limit in the
tally observed in lattice-structure components that are form of a second constraint to get practically meaning-
not explained by classical elasticity; stochastic polymer ful structures. The algorithm does not face convergence
foams (Rueger and Lakes 2016) and lattice structures issues, and the scaling of density variables is convenient.
4 Agrawal et al.
We solve five test cases using our approach and BB and void. BB yields only a single point, each of the
present one case study. The optimized structures have remaining are considered individually.
admissible heterogeneity. There is a form of continu-
ity, expected in size optimization, where some regions
have thick beams and some have very thin beams or Vertex-Vertex and Vertex-Edge : When we input only
voids. Some aspects of the macrogeometry are under- the vertex node coordinates, we get the simple cubic
standable by intuition. In the case study, we compare topology. The same topology emerges when both ver-
the designs where the unit cell topology is restricted tices and edge-centres are input. We merge these into a
(second level of heterogeneity, uniform or homogeneous single phase, phase 1 (Figure 1a).
topology) and the designs with all of the phases allowed
(heterogeneous topology). Here the optimality of het-
erogeneous designs is highlighted. We finally interpret Face-Vertex and Face-Face : With face centre and ver-
the optimal structures using unit cell tests based on tex coordinates as the input, the figure is a combination
micropolar elasticity. of the stellated tetrahedron and the octahedron. When
The paper is organised as follows: Section 2 outlines the face centres are the sole input, the octahedron unit
the identification method of the phases and the design cell comes out. Thus, we form two distinct unit cells,
parameterization. Section 3 is devoted to the optimiza- stellated tetrahedron and the octahedron , respectively
tion problem formulation, followed by the sensitivity called phase 2 (Figure 1b) and phase 7 (Figure 1g).
analysis and the algorithm used to numerically solve the
problem. Section 4 is for the discussion of the results
for the various test cases and the case-study. In Sec- Body-Vertex and Body-Edge and Body-Face : There are
tion 5, we try to interpret the designs by putting forth three distinct topologies formed here, connecting body
a hypothesis. The final section is the closure where we centre to each of the node types. These are numbered:
summarize the contribution of the paper and discuss ex- vertex, phase 3 (Figure 1c), edge centre, phase 6 (Figure
tensions where the method is applicable. The appendix 1f), and face centre, phase 8 (Figure 1h).
summarises the relations necessary for the frame FEA,
derived from the first principles.
Edge-Edge : With only edge centre coordinates as the
input, the cuboctahedron unit cell is formed. We call
this phase 4 (Figure 1d).
2 Design Parameterization
In each of the cubic subdivision of the domain, we allow
Face-Edge : With face centre and edge centre coordi-
the microstructure topology to be constructed from a
nates as the input, the segments are arranged in a plus
basic set of phase topologies. There are three core ideas
(+) sign on all of the six faces of the cube. We call this
in our design parametrization.
phase 5 (Figure 1e).
1. Decomposing the densely connected ground struc- Next, we assign a density parameter to each of the
ture topology into a finite number of groups. phases such that all of the segments grouped in a single
2. Assigning single density parameter to all segments phase have equal cross-section area, proportional to ρ.
of a group. To each of the fundamental phases we attach l, the
3. Connecting the slenderness ratio of a beam segment length of the segment in that group. For each cubic
to each density parameter. subdivision there are eight (in our case) phases and
density parameters. When all of the eight phases are
We define a connectivity scheme that yields a connec-
present, the exhaustive connectivity emerges (Figure 2).
tivity graph from a set of nodes as the input. In this
With this design parameterization, we have:
scheme, at each node, we mark its connection with all
of the nodes closest to it. Then all of the redundant con-
nections are removed. We consider four types of nodes
ρ11 ρ12 . . . . . . ρ1n
in a cube, the eight vertices (V), the six face centres
.
ρ21 . .
(F), the twelve edge centres (E) and one body centre ρ2n
(B). Using the described scheme and feeding in the co- ρ = ... .. (1)
.
ordinates in the set of two node types, we can form a
.
.. . ..
basis set of phases. There are eleven distinct combina-
tions, namely, VV, EE, FF, VE, VF, VB, EF, EB, FB, ρm1 ρm2 . . . . . . ρmn
Towards Optimal Heterogeneity in Lattice Structures 5
l11 l12 . . . . . . l1n
.
l21 . .
l2n
l = ... .. (2)
.
. ..
..
.
lm1 lm2 . . . . . . lmn
Here, m is the number of phases, which is eight in our
case. n is the number of cubic subdivisions in the design
domain.
In each phase, the types of the two nodes at the
end of each segment is unique. Consequently, no beam Fig. 2: A combination of all of the phases
segment is shared among different phases of a single
cube. They intersect and we add nodes at those places. This parametrization yields a design space within the
The basic set of phases chosen by us is a representative third stage of heterogeneity including spatial variation
set used to demonstrate the approach. There can be of phase topologies and sizes.
another set that is optimal for certain boundary condi-
tions and objective functions. The phases can also be
asymmetric, directional, be designed by a concurrent 3 Problem Formulation, Sensitivity Analysis,
approach, or come from manufacturing considerations. and Numerical Algorithm
Next, we define the proportionality constant for con-
necting the density parameters to the area of cross- 3.1 Problem Formulation
section of individual beam segments. The optimization
constraints need to be inspired from the model’s limi- The optimization problem is framed with the minimiza-
tations on the slenderness ratio. Appropriate scaling of tion of the mean compliance as the objective.
the density parameter will provide us a direct handle
on the ratio, which simplifies the constraints. When ρ
is unity, we have chosen for the slenderness ratio to be min
ρ
fT u
ij
u
3. The area of circular cross-section of a beam segment
is given by,
Subject To :
2
πlij
Ak = ρij (3)
36
λ : K(A(ρij ))u − f = 0 (5)
When we consider all of the cubic subdivisions to
be populated using the same phases, the adjacent cubic
subdivisions might share some beam segments. To ad- P
dress this, we define a redundancy index nk . The shared Λ :
X
Ak (ρij )Lk − µV ∗ = 0 (6)
segments are either present on the cube’s edges or faces. k = 1
The beams on the edges will have nk = 4 and the ones
on faces will have nk = 2. The segments completely in- m P πLk 2
side the cube will have nk = 1. On the boundary of the k 36nk lij ρij
X
φj : −κ≤0 (7)
design domain, these indices are again set to 1. To get i = 1
Vj
the area of cross-section of a beam segment, we follow
the following equation.
ε ≤ ρij ≤ ρmax
2
X πlij
Ak = ρij (4)
36nk
j= nk values Data :
To summarize, we define fundamental phases as topolo-
gies and then let the microstructure topology be a com-
bination of them, also letting the size to vary spatially. f , V ∗ , lij , Lk , nk , Vj , K, µ, ε, ρmax , κ
6 Agrawal et al.
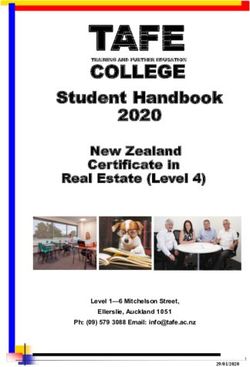
(a) Boundary condition (b) Optimized design
Fig. 3: Cantilever case boundary condition and result
(a) Boundary condition (b) Optimized design
Fig. 4: Torsion case boundary condition and result
The constraint corresponding to the Lagrange mul- that, we differentiate the potential energy w.r.t. the
tiplier λ is for the governing equation, K being the area of cross-section to get
global stiffness matrix and u the displacement. The
constraint corresponding to the Lagrange multiplier Λ Z Le
∂Π E 02 A 02 A 02
is the global volume constraint, Lk the length of the = ux + θz + θy
∂Ak 2 2π 2π
beam segment k, V ∗ is the volume of the design do- 0
main, and µ being the volume ratio. The constraint Ke G 2
+ uy 0 + θz 2 − 2θz uy 0 (8)
corresponding to the Lagrange multiplier φ is for main- 2
taining a minimum porosity in the structure, defined Ke G 2 GA 0 2
+ uz 0 + θy 2 + 2θy uz 0 + θx dl
by κ that is same for all cubic subdivisions. Vj is the 2 2π
volume of cubic subdivision j. ε and ρmax are the up-
Now we apply the Ritz method to find the elemen-
per and lower bounds on the density parameter. ε is
tal sensitivity to area of cross-section in the form of a
uniformly taken as 0.0001 while optimization and 0.01
matrix ∂K
∂Ak . The expression is present in the appendix
k
while visualization.
with the matrix values in the terms of the beam pa-
rameters. The elemental sensitivity matrix is to be ap-
propriately rotated. Using the chain rule, we perform
3.2 Sensitivity Analysis a summation of the sensitivity of all beam segments
present in a phase to finally find the sensitivity.
The Karush-Kuhn-Tucker (KKT) conditions are derived
and the sensitivities are calculated using the adjoint
method. We first find the sensitivity of the governing ∂(RT KR) X ∂Kk ∂Ak
= RT R (9)
equation with respect to the density parameters. For ∂ρij ∂Ak ∂ρij
k = all beams in phase
Towards Optimal Heterogeneity in Lattice Structures 7
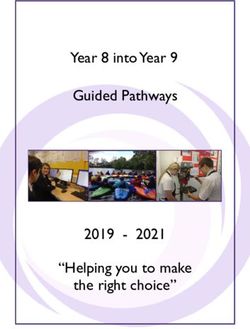
(a) Boundary condition: MBB (b) Optimized design: MBB (c) Optimized design: MBB
(d) Boundary condition: Chair (e) Optimized design: Chair (f) Optimized design: Chair
Fig. 5: Results for MBB and Chair cases
2. Calculate
the
OC multipliers by assuming the value
∂Ak 2
πlij of Λ + φVkk as unity. Multiply all of the ρij with
= (10)
∂ρij 36nk their respective multipliers.
3. Enforce the global volume constraint by dividing all
The rest of the sensitivities are also calculated fol- of the ρij by an appropriate scalar.
lowing a similar procedure. 4. Mark the design variables that have breached the
upper or lower limits and enforce the limits. The
marked variables will not be changed any further in
3.3 Numerical Algorithm the ongoing iteration. Once again satisfy the global
volume constraint by dividing the unmarked vari-
We use the optimality criteria (OC) algorithm that is
ables by an appropriate scalar.
tailored for linear density-based structural optimization
5. Find the active constraints in φj and mark the rel-
problems (Saxena and Ananthasuresh 2000).
evant design variables. Satisfy the constraint φj by
dividing each of the unmarked design variable in
∂(RT KR) the active constraints by respective scalars for each
uT u !β
(p+1) (p) ∂ρij constraint.
ρij = ρij . (11)
6. Satisfy the volume constraint by dividing the un-
φk P πLa 2
Λ+ l marked design variables by a single scalar. Remove
Vk a
36na ij
and reset all of the marks placed on variables. Go
The initial guess is taken to be uniform densities with back to step (1) until convergence.
all of the eight phases present equally and the volume
The convergence is reached when the difference in the
constraint satisfied. The number of cubic elements de-
pends on the problem. The boundary conditions are objective function value for successive iterations is lower
than a tolerance, which is taken in accordance with the
applied appropriately. The update scheme is as follows.
problem. This algorithm leads us to a local minimum.
1. Using the design variables perform function evalua- Here, β is a positive numerical handle less than unity. It
tion and sensitivity analysis. is constant for an optimization run, but appropriately
8 Agrawal et al.
(a) Phase 1 (b) Phase 2 (c) Phase 3 (d) Phase 4
(e) Phase 5 (f) Phase 6 (g) Phase 7 (h) Phase 8
(i) Comparison of stiffness in homogeneous designs (bars in color) and het-
erogeneous design (black dashed line, Figure 3b)
Fig. 6: Case-Study: Designs for Cantilever case
choosen to solve for different values of the volume ratio 2005; Ayachit 2015). The dimensions are realistic and
µ. We have developed a vectorized script in MATLAB the area of cross section of the beam segments are up
implementing the FEA and the algorithm. to scale. Each phase has a different color assigned to it
for the purpose of visualization.
4 Numerical Results
4.1 Case 1: Cantilever Beam
We solve several problems to illustrate the approach
described. The mean compliance in all of the problems The first problem is the cantilever case (boundary con-
converges to 4 significant digits comfortably within 100 ditions: Figure 3a). We encastre one end of the domain
iterations. by completely fixing the nodes that fall in the blue re-
For the optimized results in this section, we have gion. A distributed transverse force is applied to all of
taken the minimum porosity limit κ to be 40% and the the nodes on the other end, red arrows indicate the di-
target volume ratio µ to be 5%. The plots for the opti- rection. The optimized structure is the adjoining Figure
mized design are rendered in ParaView (Ahrens et al. 3b.
Towards Optimal Heterogeneity in Lattice Structures 9
(a) Phase 1 (b) Phase 2 (c) Phase 3 (d) Phase 4
(e) Phase 5 (f) Phase 6 (g) Phase 7 (h) Phase 8
(i) Comparison of stiffness in homogeneous designs (bars in color) and het-
erogeneous design (black dashed line, Figure 4b)
Fig. 7: Case-Study: Designs for Torsion case
There is a qualitative match with the intuitive ex- loaded end (Figure 4b). The final mean compliance is
pectations on the stiffest structure. The designed struc- 7.403E-3 Nm.
ture has a major amount of material concentrated at
the top and bottom stacks. Furthermore, the density is
more towards the support end, i.e. the beam segments 4.3 Case 3 and 4: MBB and Chair Problem
are thicker towards the support end. The final value of
mean compliance is 7.919E-4 Nm. Here, we consider two realistic problems of larger size
than the first two cases. The first is the MBB problem
(Figure 5a) with a rectangular domain, completely fixed
4.2 Case 2: Torsion at two ends and a central load. The second is the chair
problem (Figure 5d) with an L-shaped 3D domain. The
In this case, we take the same geometry as case 1 and seat and the backrest have forces normal to the surfaces
apply a distributed torsion load on the load end (Figure and the four corners on the bottom face are fixed. The
4a). The support end is encastre. The optimized design optimized mean compliance for MBB case is 1.002E-4
is found to be a hollow tube with a closed lid at the Nm, and for the chair case it is 1.2436E-3 Nm.
10 Agrawal et al.
(a) Phase 1 (b) Phase 2 (c) Phase 3 (d) Phase 4
(e) Phase 5 (f) Phase 6 (g) Phase 7 (h) Phase 8
(i) Comparison of stiffness in homogeneous designs (bars in color) and het-
erogeneous design (black dashed line, Figure 5b)
Fig. 8: Case-Study: Designs for the MBB case
The heterogeneity in microstructure topology is vis- 4.4 Case Study: Optimal Heterogeneity with all
ible in the colors. For the MBB case, the middle por- phases vs Optimal Homogeneity with a single phase
tions are a combination of phase 3 (yellow) and phase
1 (blue), connecting the two stacks of phase 2 (orange)
present at the extreme ends. The place where load is We now consider a case study to highlight the opti-
applied has phase 1, 4 (purple) and 7 (maroon). mality of components with heterogeneous microstruc-
ture topology, as compared to components with homo-
geneous lattice structure.
We solve the four examples discussed previously.
Eight more optimization runs are performed for each
case allowing only one type of phase. All of the param-
In the chair case, the front legs mostly have phase eters remain the same and statically equivalent loads
1 and phase 5 (green), while the back legs only have are applied. The designs are present in Figures 6, 7,
phase 1. The seat has a lot of purple (phase 4), while 8, 9. The mean compliance for the optimized designs
the top of the back rest mostly has low density oranges in heterogeneous and homogeneous cases are also com-
and yellow (phase 2 and 3). pared.Towards Optimal Heterogeneity in Lattice Structures 11
For a particular boundary condition, the macroge- 1985): tension or compression, shear, torsion and bend-
ometry is different for the different phases. In the tor- ing. Keeping the volume constant, we apply the loads
sion load case, homogeneous designs for phase 2 and to all of the phases individually and rank them on the
phase 4 have mean compliance very close to the het- basis of the stiffness. These are represented in the four
erogeneous design, a coincidence not observed in other plots (Figure 10). The ranks are strain energies trans-
cases. The phases 2 and 4 are the stiffest for the tor- formed such that 1 represents the stiffest phase and 8
sion case, as evident by their dominance in the het- represents the opposite. The ranks in the middle are
erogeneous design. We note that phases 3, 6 and 7 are linearly interpolated between these. The benefit of this
the next best homogeneous designs, having similar opti- is that we get an idea of the closeness of the various
mized homogeneous macrogeometry as phases 2 and 4. phases as well as the transitions. Next, we look at the
They do not appear in the heterogeneous designs due to designs that have pure load cases, axial tension (Fig-
the volume constraint, and connecting at lesser number ure 12e), torsion (Figure 4b) and pure bending (Figure
of points (8, 12, and 6 respectively). As expected, the 12a).
mean compliance of the heterogeneous design is better To illustrate, we consider the optimized design for
than all of the uniform designs, in all the load cases. the torsion case. For a typical cube, we plot its inter-
The last point has been shown previously for designs nal forces (Figure 13c). The cube is under torsion and
where, a finite amount of microstructures are allowed, our phase plots will apply here. Phases 2 and 4 domi-
and the uniform designs do not have size variation. We nate and are clearly the best ones for torsion loading in
show this in a more general way. Figure 10c.
Similarly, it can be shown that in the optimized
design for axial tension case, a typical cube is under
5 Interpretation of the Optimal Designs
tension (Figure 13a). The design is prismatic and the
phases 8, 5, and 1 dominate, the best ones for tension
As stated earlier, the bulk behaviour of lattice-structure
in Figure 10a. The pure bending design has material
materials is captured by micropolar elasticity (Jasiuk
going to the top and bottom stacks Figure 12a. Only
and Ostoja-Starzewski 2004; Rueger et al. 2019) as op-
phase 1 is present at those locations, the best one for
posed to classical elasticity. For cellular materials (such
bending load in Figure 10d.
as lattice structures), there is a practical limit on how
We have taken the pure bending case further by per-
small the critical volume is for the continuum assump-
forming optimizations for different volume ratios. The
tion to hold true (Eringen 1967). In a subdivision of
designs are present in Figure 12 alongwith the mean
the domain, the internal moments that arise from the
compliance trend, which is monotonically decreasing.
neighbouring subdivisions may not balance out on their
It can be seen that in the top and bottom stacks, ini-
own. In this situation, the forces need to contribute to
tially at µ = 0.05, only phase 1 is present. The next best
establish moment equilibrium. When the microstruc-
phases are phase 2,8 and 5. Among these, only phase
tures are homogenized, this aspect is not reflected in
5 connects with phase 1 and its presence increases as
the assumptions, leading to discrepancies. We have ob-
the volume ratio increases. Towards the end, we can see
served that during the pure bending of a square cross-
that both phase 1 and phase 5 are chosen by the algo-
sectioned beam with a uniform infill of all of the phases,
rithm to populate the locations. This shows that the
the qualitative behaviour matches the analytical predic-
algorithm chooses the unit cells by accounting both for
tion by micropolar elasticity (Lakes and Drugan 2015).
compatibility and optimality.
The cross-section of the beam warps into an S shape
The trend observed for axial force, torsion and pure
(Figure 11b).
bending design validate our hypothesis. It can be easily
Thus, we need to explore homogenization techniques
seen that the phases chosen at different locations in the
tailored to extract effective micropolar constants (six,
optimized design are indeed the ones that perform the
as opposed to two in classical) from a microstructure.
best under the internal loads that act at the location,
Discrete asymptotic homogenization (Tollenaere and Cail-
and satisfy the connectivity requirements.
lerie 1998) has been developed for topologies that con-
sist of beams. The adaptation of that to 3D structures
that yield micropolar constants is yet to be done. 6 Closure
In order to interpret the designs, we need to find why
a certain combination of phases appear at a location. Lattice structures, a special case of cellular-material
Our hypothesis is that the internal-force condition on a structures, are becoming popular in practical applica-
cube drives the selection of phases. We consider four tions due to the advent of additive manufacturing. Ear-
basic load tests from micropolar elasticity (Adomeit lier works on topology optimization consider only one12 Agrawal et al.
(a) Phase 1 (b) Phase 2 (c) Phase 3 (d) Phase 4
(e) Phase 1 (f) Phase 6 (g) Phase 7 (h) Phase 8
(i) Comparison of stiffness in homogeneous designs (bars in color) and het-
erogeneous design (black dashed line, Figure 5e)
Fig. 9: Case-Study: Designs for the Chair caseTowards Optimal Heterogeneity in Lattice Structures 13
(a) Tension Phase Plot (b) Shear Phase Plot
(c) Torsion Phase Plot (d) Bending Phase Plot
Fig. 10: Phase Plots for the various load cases
(a) Undeformed square cross section bar (b) S-type warping of the cross section
Fig. 11: Sigmoid warpage of the cross section
type of lattice unit cell. But then, as is evident in nat- pared to the size of the structure. We only considered
ural materials, heterogeneity is important. Hence, in the mean compliance minimization in our examples but
this paper, we presented design parameterization and a the method presented is equally applicable to other ob-
method to obtain optimized heterogeneous lattice struc- jectives. We show that heterogeneous design is better
tures. We considered, eight types of unit cells and called than any of the eight homogeneous design in all four
them phases. Therefore, the obtained result could have examples considered here.
any number of phases at any location, including none
(indicating void). Since we have used Timoshenko beam In order to interpret the optimized results, we ranked
modeling, we have captured the mechanics that account eight unit cells in resisting axial, bending, and torsion
for shear effects also for not-so-slender beam segments. loads. These rankings to indicate why a certain loca-
This makes our results suitable for 3D printing where tion in the optimized structure has certain type(s) of
the unit cell size does not need to be too small com- phase(s). We also discussed why certain unit cell types
are not seen in the optimal heterogeneous design due14 Agrawal et al.
(a) 5 % Volume ratio (b) 9 % Volume ratio (c) 15 % Volume ratio (d) 25 % Volume ratio
(e) Optimised design for Ax- (f) Monotonically decreasing compliance for in-
ial Tension, 5% Volume ratio creasing volume ratio
Fig. 12: Optimal designs for Axial tension case and Pure Bending case with various volume ratio
(a) Pure Axial Tension (b) Pure Bending (c) Torsion
Fig. 13: Internal Force Condition on a typical cube in optimized designs
to incompatibility in connectivity, even though they are we have taken a circular cross section, the orientation of
superior than others when considered alone. While this the other axes is chosen to suit ease of programming, as
validation is useful, we suggest that micropolar elastic- it does not affect the end result. The elemental matrices
ity approach is a better way to deal with this and to are multiplied by suitable rotation matrices during the
enhance computational efficiency. assembly of the global stiffness matrix..
It may be noted that u1 , u2 and u3 are the displace-
ments at each point along the three axes in the global
7 Appendix coordinate system. The Eulerian description of motion
is followed and we assume that the displacements are
This section is concerned with the finite element for- small. The displacements are assumed to have a form:
mulation of the Timoshenko 3D frame element from the
first principles. We have taken the shape functions from
Karadeniz et al. (2013). The symbols have their usual
meanings unless stated otherwise. The elemental stiff- u1 (x1 , x2 , x3 ) = ux (x1 ) − θz (x1 )x2 + θy (x1 )x3
ness matrix is derived for the local coordinate system u2 (x1 , x2 , x3 ) = uy (x1 ) − θx (x1 )x3 (12)
such that x1 direction is along the axis of the beam. As u3 (x1 , x2 , x3 ) = uz (x1 ) + θx (x1 )x2Towards Optimal Heterogeneity in Lattice Structures 15
Here, the six degrees-of-freedom (DOFs), ux , uy , uz , The shape function expressions are listed next.
θx , θy , θz , are all solely functions of x1 . Thus, the do-
main is converted from a 3D bulk solid to a line with the N1 = 1 − ξ N2 = ξ
implicit understanding of the equations. The stresses
and the strains are: 2α 3 2
G1 = 1 − ξ− ξ2 + ξ3
2α + 1 2α + 1 2α + 1 (15)
σ11 = E(ux 0 − θz 0 x2 + θy 0 x3 ) G2 =
α+1
Le ξ −
α+2
Le ξ 2 +
1
Le ξ 3
2α + 1 2α + 1 2α + 1
σ12 = σ21 = Ke G(uy 0 − θz ) − Gθx 0 x3 G3 = 1 − G1
σ13 = σ31 = Ke G(uz 0 + θy ) + Gθx 0 x2
(13)
0 0 0 α α−1 1
11 = ux − θz x2 + θy x3 G4 = − Le ξ − Le ξ 2 + Le ξ 3
2α + 1 2α + 1 2α + 1
uy 0 − θx 0 x3 − θz 6ξ(ξ − 1)
12 = 21 = G5 =
2 Le (2α + 1)
uz 0 + θx 0 x2 + θy (ξ − 1)(2α − 3ξ + 1)
13 = 31 = G6 = −
2 2α + 1
In the shear stresses, we multiply the shear correction ξ(2α + 3ξ − 2)
G8 = G7 = −G5
factor to the terms arising from bending. We add them 2α + 1
here so that it naturally comes in the strain energy H1 = G1 H2 = −G2 (16)
functional.
In order to form the beam element, consider two H3 = 1 − H1 H4 = −G4
nodes to be present at the either end of the member.
The scalar values of the DOFs at these nodes be de- H5 = G5 H6 = G6
noted by subscripts 1 and 2. In the middle part, the
values are interpolated by shape functions. H7 = G5 H8 = G8
The axial displacement and the torsion have linear
shape functions. Let ξ = L x1
. 6EI
e α=
Ke GALe 2
ux (ξ) = N1 (ξ)ux1 + N2 (ξ)ux2
(14) We now proceed to the variational formulation that
θx (ξ) = N1 (ξ)θx1 + N2 (ξ)θx2
will yield the elemental stiffness matrix. In our case,
The displacements related to bending, uy , θz , uz , θy , load vectors are not derived as none of the forces will
have cubic shape functions. Their form is different from be body forces. We will apply concentrated forces (and
the regular Hermite polynomials as they arise from the moments) on the nodes, that are easy to deal with. The
analytical solution of the Timoshenko beam (Karadeniz expression for the potential energy is,
et al. 2013). Z
σij ij
Π= dV + Work Potential (17)
uy = C0 + C1 ξ + C2 ξ 2 + C3 ξ 3 V 2
6EI The first term leads to the stiffness matrix,
θz = C1 + C2 ξ + C3 3ξ 2 +
Ke GA
Z Le "
1 2 2 2 2
E(Aux 0 + Iθz 0 + Iθy 0 ) + GIθx 0
uz = C4 + C5 ξ + C6 ξ 2 + C7 ξ 3 0 2
6EI 2
θy = −C5 − C6 ξ − C7 3ξ 2 + + Ke G(Auy 0 + Aθz 2 − 2Aθz uy 0 ) (18)
Ke GA #
2
By condensing this to the shape function form and sub- + Ke G(Auz 0 + Aθy 2 + 2Aθy uz 0 )
stituting the DOF values, we get,
uy (ξ) = G1 (ξ)uy 1 + G2 (ξ)θz 1 + G3 (ξ)uy 2 + G4 (ξ)θz 2 In this expression, the first term comes from normal
strains that arise due to the axial and bending deforma-
θz (ξ) = G5 (ξ)uy 1 + G6 (ξ)θz 1 + G7 (ξ)uy 2 + G8 (ξ)θz 2 tions. The third and fourth come from the shear strains
uz (ξ) = H1 (ξ)uz 1 + H2 (ξ)θy 1 + H3 (ξ)uz 2 + H4 (ξ)θy 2 in both of the lateral directions. The second term is due
θy (ξ) = H5 (ξ)uz 1 + H6 (ξ)θy 1 + H7 (ξ)uz 2 + H8 (ξ)θy 2 to the torsion. Since we do not consider the distributed16 Agrawal et al.
forces on a beam, we need not delve into the work po-
tential expression.
The tedious calculations involving the application of E GA
the Ritz method, and the subsequent integration steps, a1 = a2 =
Le πLe
are done using the symbolic MATLAB toolbox. For con-
3EA + 2πKe GLe 2 c2 A2 2
venience in calculating the sensitivity of the governing a3 = a4 = a3
equation w.r.t. the area the expressions are converted πLe 2 (2cA + 1)2 Le
in the terms of the area of cross-section. The final form 2EA + 2Ec2 A3 + πKe GLe 2 c2 A2 + 2EcA2
of the stiffness matrix is obtained as: a5 =
πLe 2 (2cA + 1)2
EA − 2Ec2 A3 + πKe GLe 2 c2 A2 − 2EcA2
a6 =
πLe 2 (2cA + 1)2
a2 0 0 0 0 0 −a2 0 0 0 0 0
a4 0 0 0 a3 0 −a4 0 0 0 a3
a4 0 −a3 0 0 0 −a4 0 −a3 0 Acknowledgements We thank Prof. Vijay Natarajan from
a2 0 0 0 0 0 −a1 0 0 CSA, IISc Bengaluru, for his advice on the visualization of dif-
ferent phases. Valuable discussions with Mr. Jaddivada Sid-
a6 0 0 0 a3 0 a5 0 dharth enriched our work in implementing good programming
a6 0 −a3 0 0 0 a5
practices. Financial support from the Uchhatar Avishkar Yo-
a2 0 0 0 0 0 jana (UAY) of Government of India, Ministry of Heavy In-
a4 0 0 0 −a3
dustries with partial support from Eaton Corporation, Pune,
India. We also thank Dr. Hari Prasad Konka and his team
a4 0 a3 0 from Eaton for their regular insights all along the work.
a1 0 0
a6 0
a6
Conflict of interest
(19)
There is no conflict of interest in this work with any of
the authors.
G E 2
a1 = A2 a2 = A Replication of Results
2πLe 2 Le
A2
2a3 Matlab codes written to produce results are shared at
a3 = GKe c a4 =
2cA + 1 Le mecheng.iisc.ac.in/suresh/LatticeStructureOptimization
a3 Le a3 Le
a5 = − (cA − 1) a6 = (cA + 2)
3 3
E 3(1 + ν)
G= c= References
2(1 + ν) πKe Le 2
Adomeit G (1985) Determination of elastic constants of a
The sensitivity matrix is obtained as: structured material. In: Kröner E (ed) Mechanics of
Generalized Continua, IUTAM Symposia (International
Union of Theoretical and Applied Mechanics), Springer,
a1 0 0 0 0 0 −a1 0 0 0 0 0 Berlin, Heidelberg, pp 80–82
a4 0 0 0 a3 0
−a4 0 0 0 a3 Ahrens J, Geveci B, Law C (2005) Paraview: An end-user
a4 0 −a3 0 0 0 −a4 0 −a3 0 tool for large data visualization. Visualization Handbook
Ashby M (1991) Overview no. 92: Materials and shape. Acta
a2 0 0 0 0 0 −a2 0 0
Metallurgica et Materialia 39:1025–1039
a5 0 0 0 a3 0 a6 0 Ayachit U (2015) The ParaView Guide: A Parallel Visualiza-
a5 0 −a3 0 0 0 a6
tion Application. Kitware
a1 0 0 0 0 0
Bhate D (2019) Four questions in cellular material design.
Materials 12:1060
a4 0 0 0 −a3
Bhate D, Penick CA, Ferry LA, Lee C (2019) Classification
a4 0 a3 0 and selection of cellular materials in mechanical design:
a2 0 0 Engineering and biomimetic approaches. Design 3(1):19
a5 0 Cheng L, Liu J, To AC (2018) Concurrent lattice infill with
feature evolution optimization for additive manufactured
a5
heat conduction design. Structural and Multidisciplinary
(20) Optimization 58:511–535Towards Optimal Heterogeneity in Lattice Structures 17
Clausen A, Aage N, Sigmund O (2016) Exploiting addi- Rozvany GIN, Zhou M (1991) The coc algorithm, part i:
tive manufacturing infill in topology optimization for im- Cross-section optimization or sizing. Computer Methods
proved buckling load. Engineering 2:250–257 in Applied Mechanics and Engineering 89:281–308
Daynes S, Feih S, Lu WF, Wei J (2019) Design concepts Rueger Z, Lakes RS (2016) Experimental cosserat elasticity
for generating optimised lattice structures aligned with in open cell polymer foam. Philosophical Magazine 96:93–
strain trajectories. Computer Methods in Applied Me- 111
chanics and Engineering 354:689–705 Rueger Z, Ha CS, Lakes RS (2019) Cosserat elastic lattices.
Deng J, Chen W (2017) Concurrent topology optimization Mechanics of Extreme Materials 54:1983–1999
of multiscale structures with multiple porous materials Saxena A, Ananthasuresh GK (2000) On an optimal property
under random field loading uncertainty. Structural and of compliant topologies. Structural and Multidisciplinary
Multidisciplinary Optimization 56:1–19 Optimization 19:36–49
Eringen AC (1967) Theory of micropolar elasticity. Technical Sivapuram R, Dunning PD, Kim HA (2016) Simultaneous
Report for the Office of Naval Research, Department of material and structural optimization by multiscale topol-
the Navy, USA P-41, Princeton University ogy optimization. Structural and Multidisciplinary Opti-
Gibson L, Ashby M (1997) Cellular Solids: Structure and mization 54:1267–1281
Properties. Cambridge University Press, Cambridge Sundaram MM, Ananthasuresh G (2009) Gustave eiffel and
Imediegwu C, Murphy R, Hewson R, Santer M (2019) Multi- his optimal structures. Resonance 14(9):849–865
scale structural optimization towards three-dimensional Tollenaere H, Caillerie D (1998) Continuous modeling of lat-
printable structures. Structural and Multidisciplinary tice structures by homogenization. Advances in Engineer-
Optimization 60:513–525 ing Software 29:699–705
Jasiuk I, Ostoja-Starzewski M (2004) From lattices and Verma CS, Rankouhi B, Suresh K (2020) A combinatorial ap-
composites to micropolar continua. In: Harik VM, proach for constructing lattice structures. ASME Journal
Luo LS (eds) Micromechanics and Nanoscale Effects. of Mechanical Design 142:041404
ICASE/LaRC Interdisciplinary Series in Science and En- Wang C, Zhu JH, Zhang WH, Li SY, Kong J (2018) Concur-
gineering, vol 10, Springer, Dordrecht, pp 175–212 rent topology optimization design of structures and non-
Jia J, Da D, Loh CL, Zhao H, Yin S, Xu J (2020) Multi- uniform parameterized lattice microstructures. Structural
scale topology optimization for non-uniform microstruc- and Multidisciplinary Optimization 58:35–50
tures with hybrid cellular automata. Structural and Mul- Wang C, Gu X, Zhu J, Zhou H, Li S, Zhang W (2020)
tidisciplinary Optimization 62:757–770 Concurrent design of hierarchical structures with three-
Karadeniz H, Saka MP, Togan V (2013) Finite element anal- dimensional parameterized lattice microstructures for ad-
ysis of space frame structures. In: Karadeniz H (ed) ditive manufacturing. Structural and Multidisciplinary
Stochastic Analysis of Offshore Steel Structures. Springer Optimization 61:869–894
Series in Reliability Engineering, Springer, London, pp 1– Wang Y, Kang Z (2019) Concurrent two-scale topological
119 design of multiple unit cells and structure using com-
Koh SK, Ananthasuresh GK, Croke C (2005) A quadratic bined velocity field level set and density model. Computer
programming formulation for the design of reduced pro- Methods in Applied Mechanics and Engineering 347:340–
tein models in continuous sequence space. ASME Journal 364
of Mechanical Design 127(4):728–735 Wu J, Wang W, Gao X (2019a) Design and optimization of
Kumar T, Suresh K (2020) A density-and-strain-based k- conforming lattice structures. IEEE Transactions on Vi-
clustering approach to microstructural topology opti- sualization and Computer Graphics 27:43–56
mization. Structural and Multidisciplinary Optimization Wu Z, Xia L, Wang S, Shi T (2019b) Topology optimiza-
61:1399–1415 tion of hierarchical lattice structures with substructuring.
Lakes R (1993) Materials with structural hierarchy. Nature Computer Methods in Applied Mechanics and Engineer-
361:511–515 ing 345:602–617
Lakes R (1998) Elastic freedom in cellular solids and com- Yin L, Ananthasuresh GK (2001) Topology optimization of
posite materials. In: Golden KM, Gritnmett GR, James compliant mechanisms with multiple materials using a
RD, Milton GW, Sen PN (eds) Mathematics of Multiscale peak function material interpolation scheme. Structural
Materials, Springer Verlag, New York, pp 129–153 and Multidisciplinary Optimization 23:49–62
Lakes R, Drugan WJ (2015) Bending of a cosserat elastic bar Zhang J Puand Toman, Yiqi Y, Biyikli E, Kirca M,
of square cross section - theory and experiment. ASME Chmielus M, To AC (2015) Efficient design-optimization
Journal of Applied Mechanics 82:091002 of variable-density hexagonal cellular structure by ad-
Liu Z, Xia L, Xia Q, Shi T (2020) Data-driven design ap- ditive manufacturing: theory and validation. Journal of
proach to hierarchical hybrid structures with multiple lat- Manufacturing Science and Engineering 137:021004
tice configurations. Structural and Multidisciplinary Op- Zhang Y, Li H, Xiao M, Gao L, Chu S, Zhang J (2019)
timization 61:2227–2235 Concurrent topology optimization for cellular structures
Michell A (1904) The limits of economy of material in frame- with nonuniform microstructures based on the kriging
structures. The London, Edinburgh, and Dublin Philo- metamodel. Structural and Multidisciplinary Optimiza-
sophical Magazine and Journal of Science 8:589–597 tion 59:1273–1299
Robbins J, Owen S, Clark B, Voth T (2016) An efficient and
scalable approach for generating topologically optimized
cellular structures for additive manufacturing. Additive
Manufacturing 12:296–304
Rodrigues H, Guedes JM, Bendsøe MP (2002) Hierarchical
optimization of material and structure. Structural and
Multidisciplinary Optimization 245:1–10You can also read