Technical Committee on System Identification and Adaptive Control - IEEE Control Systems Society
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
» TECHNICAL ACTIVITIES
Technical Committee on System Identification and Adaptive Control
T
he IEEE Control Systems Society
(CSS) Technical Committee on
System Identification and Adap-
It is undeniable that system identification and
tive Control (TC-SIAC) is a commu- adaptive control are strongly related to traditional
nity of professionals and researchers
whose main activity is the develop- statistics, econometrics, and machine learning.
ment of innovative theoretical and
technological solutions in the scien-
tific areas of system identification and
adaptive control. On the one hand, the »» create opportunities for techni- Signal Processing) and by their edito-
system identification domain includes c a l d i s c u s sio n s a mo ng TC rial roles with major IFAC journals.
all aspects of data-based modeling members, with a specific focus
and learning (ranging from method- on emerging research needs and ACTIVITIES
ological developments, to computa- directions Since the last report for IEEE Control
tional issues, to practical real-world »» foster the promotion of new ini- Systems dedicated to the TC-SIAC
applications). Important tasks such as tiatives and research interac- technical activities in June 2019, the
model selection, experiment design, tions among members efficiency and vitality of TC-SIAC
and model validation are also ad- »» disseminate relevant information members have been highlighted by
dressed. On the other hand, the world about TC activities inside and out- the regular organization of invited
of adaptive control concerns all meth- side the CSS (for example, indus- sessions, tutorials, and workshops
ods and technologies that enable feed- trial people and students) via an (for example, more than 30 sessions
back control systems to comply with up-to-date website (http://system have been sponsored by TC-SIAC) in
time-varying environments or system -identification.ieeecss.org) gather- major control-oriented conferences,
changes like different operating con- ing the list of main events and initia- such as the ACC, European Control
ditions or aging. tives of the community as well as Conference, and CDC. In addition, a
The two disciplines share one key recent educational material. number of special issues have been
feature: the use of data for control to promoted in world-leading journals,
devise accurate models of modern STATUS such as IEEE Transactions on Control
complex systems and improve the ef- TC-SIAC has held regular meetings Systems Technology, International Jour-
fectiveness and robustness of nonlin- during every past American Control nal of Robust and Nonlinear Control, and
ear and time-varying controllers. In Conference (ACC) and Conference on IET Control Theory and Application, to
the current “big data” era, the research Decision and Control (CDC). Given name a few. The topics proposed for
from this community is therefore of the importance of the fields in modern the special issues range from theoreti-
paramount importance to provide the automation, TC-SIAC is constantly cal subjects (such as the modeling and
right tools to address modern autono- increasing its membership and cur- control of hybrid systems) to modern
mous systems and increasingly chal- rently counts 87 CSS active members promising applications for system
lenging control problems. at all levels of IEEE membership. The identification and adaptive control
interaction between our TC mem- (such as biomedical systems or neu-
OBJECTIVES bers and other control communities, roscience). Finally, TC-SIAC members
The main goals of TC-SIAC are the such as the International Federation are very active in the development of
following: of Automatic Control (IFAC), is very benchmark case studies and software
strong, as witnessed by the involve- (including a number of Matlab tool-
Digital Object Identifier 10.1109/MCS.2020.3019149 ment of several TC members in IFAC boxes, such as the well-known System
Date of current version: 13 November 2020 TC 1.1. (Modeling, Identification, and Identification Toolbox2 to disseminate
18 IEEE CONTROL SYSTEMS » DECEMBER 2020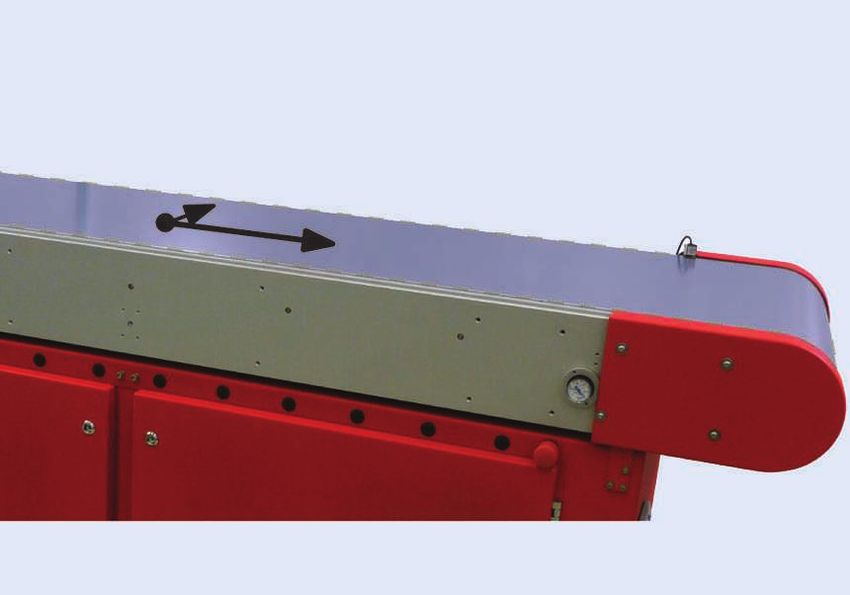
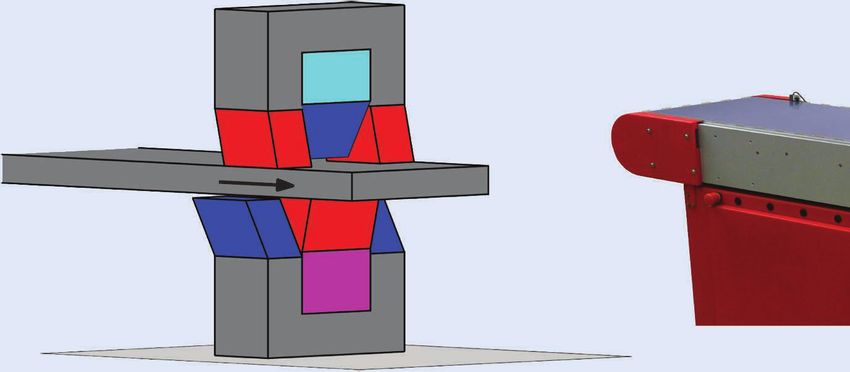
the obtained scientific results to a research activities implemented by TC societal) impact. In Figure 1(a), a sche-
wide audience. members. Therefore, as an example, we matic representation of a walking piezo-
discuss here one interesting case study stepper actuator is given. These actuators
RECENT RESEARCH showing how system identification and are used, for instance, in high-precision
Due to space limits, it would be impos- adaptive control may have a signifi- motion stages for electron micros-
sible to report a summary of all of the cant industrial (but also economic and copy. The walking behavior enables an
x
y
FIGURE 1 The schematics of a walking piezo-stepper actuator and a generic substrate carrier.
× 10–7
1
Spatial GP Buffer (N)
0
–1
0.5
–2
0 1/2 π π 3/2 π 2π
Error (m)
0 Angular Position (rad)
(b)
0
Disturbance (N)
–0.5
–1
–2
–1
0 0.5 1 0 1 2
Time (s) Time (s)
(a) (c)
FIGURE 2 The experimental results of position disturbance compensation using innovative learning control showing (a) error, (b) force
disturbance, and (c) force disturbance in the time domain. These results were obtained by Leontine Aarnoudse, Noud Mooren, Nard
Strijbosch, Paul Tacx, Gert Witvoet, and Tom Oomen. Industrial collaborators from CCM-Sioux (specifically, Lennart Blanken) and
Thermo Fisher Scientific (specifically, Edwin Verschueren) are gratefully acknowledged as well as I-mech (ECSEL-2016-1 under grant
agreement 737453) and NWO VIDI project number 15698.
DECEMBER 2020 « IEEE CONTROL SYSTEMS 19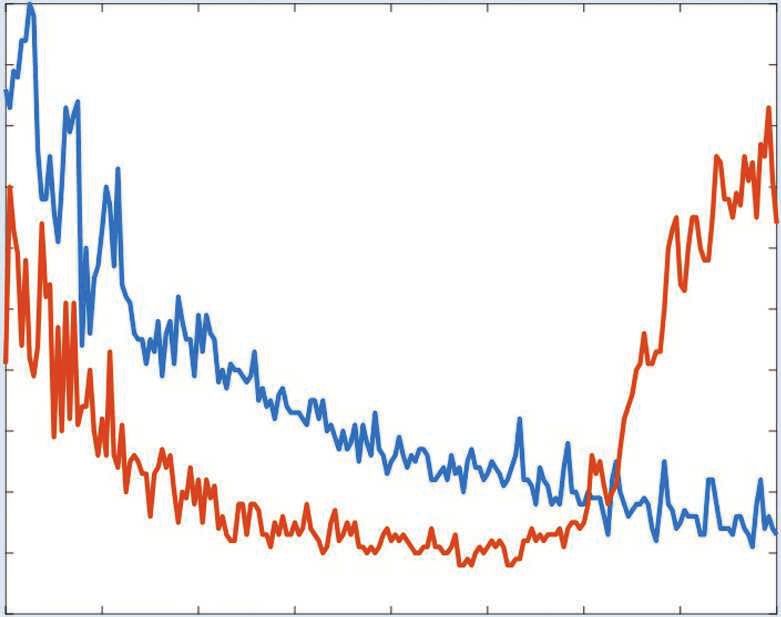
100 100
90 System Identification 90 Data-Whatever Control
Model Learning Reinforcement Learning
80 80
Google Occurrences
Google Occurrences
70 70
60 60
50 50
40 40
30 30
20 20
10 10
Source: Google Trends Source: Google Trends
0 0
2004 2006 2008 2010 2012 2014 2016 2018 2020 2004 2006 2008 2010 2012 2014 2016 2018 2020
Year Year
(a) (b)
FIGURE 3 Different trends of web searches for the normalized occurrences of the keywords of (a) system identification and (b) adaptive/
data-based control as compared to their counterparts in machine learning. (Data source: Google Trends, January 2020).
infinite stroke yet also introduces a dis- A typical force disturbance in the belt learning. Nonetheless, they also pres-
turbance that is periodic in the spatial system is also presented in Figure 2(b). ent profound differences, linked to the
position domain. The employed learning algorithm ex- context in which they were developed
In Figure 1(b), a generic substrate ploits the data points (x) that are non- and more than 60 years of successful
carrier consisting of a belt system is equidistant in the spatial domain and research and applications in the most
depicted. These belt systems are used uses these to identify a Gaussian process diverse fields. A new, very critical chal-
at different speeds, for example, in the that represents the periodic position lenge for our TC is to find the right way
paper-handling systems of large-vol- domain disturbance. In Figure 2(c), to spread our experience and expertise
ume printer systems. Imperfections in the disturbance is presented in the time in the industry, in the various scientific
the rollers of this type of system lead domain (blue line), together with the communities, and among the new gen-
to disturbances that are periodic in the compensating feedforward (red line). erations of researchers. We have to do
spatial domain, and it is well known After one full period, the compensation it by trying to constructively integrate
that disturbances that reproduce in coincides with the disturbance. into the other communities that address
the position domain are a key chal- the use of data for the creation of knowl-
lenge in industrial applications. A MAJOR CHALLENGE edge and the progress of engineering,
However, the performance ob- In the golden age of artificial intelligence while, at the same time, preserving our
tained by traditional control tools can and machine learning, researchers and identity and our peculiarities.
be outperformed by learning control al- scientists outside our community have To achieve our goals, we welcome
gorithms that identify the disturbance also started to use some of our methods all interested IEEE CSS members to
directly in the position domain. As and technologies, showing they may join. TC-SIAC is particularly interested
an example, Figure 2(a) shows some be key to solving open problems in dif- in involving young, brilliant students
experimental results of the walking ferent disciplines. However (as clearly and people from industry. Please visit
piezo-stepper actuator with a new shown in Figure 3), it is a fact that while the TC-SIAC website for more detailed
commutation-angle iterative learning machine learning tools are widely information about members and ini-
control proposed by the Control Sys- researched and available, there is less tiatives and send me an email (simone
tems Technology Group at TU Eind- awareness of the opportunities offered .formentin@polimi.it) to take an active
hoven. In the plot, it is evident that the by our disciplines. part in our activities.
error without compensation (red line) On the one hand, it is undeniable
is significantly larger than the error that system identification and adaptive Simone Formentin
obtained using commutation-angle control are strongly related to tradition-
learning compensation (green line). al statistics, econometrics, and machine
20 IEEE CONTROL SYSTEMS » DECEMBER 2020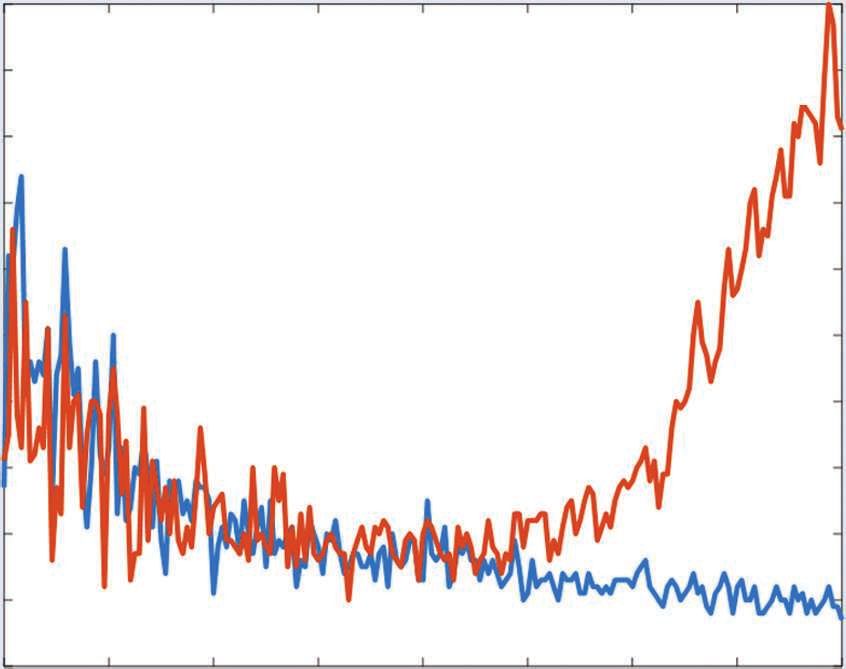
You can also read

















































