NASA MINDS 2022 Tea ms - NASA Minority University Research and Education Project (MUREP) Innovative New Designs for Space
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
NASA MINDS
2022 Teams
NASA Minority University Research and Education Project
(MUREP) Innovative New Designs for Space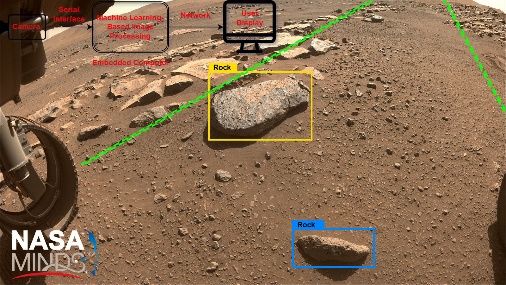
Table of Contents
Click on any page number ( in blue) to be transported to that page
Alabama A&M University , Team: AirGIS - Normal, Alabama 4
Project: Mars Topographic Map Generation with Artificial Intelligence Feature Detection
Albany State University, Team: NASA ROVER AI-EYES - Albany, Georgia 5
Project: NASA-ROVER-AI-EYES: Using Tensorflow to detect craters on Mars
Blackfeet Community College, Team: Concept Squad - Browning, Montana 6
Project: Researching Lunar Dust's Chemical Composition to Find a Solution to Nasa's Regolith Adhesion Dilemma.
Bunker Hill Community College, Team: Bunker-Backers - Boston, Massachusetts 7
Project: Soft Exo-suit for Astronaut Physical Therapy
California State Polytechnic University Pomona, Team: Kepler-452b Quantum - Pomona, California 8
Project: Low-Power reconfigurable processor for securing space applications using post-quantum cryptographic algorithms
California State Polytechnic University Pomona, Team: TOI-1231b - Pomona, California 9
Project: Low-Power Flight Controller using Raspberry Pico and FPGA for drones' applications
California State University Los Angeles, Team: Cryo-Swarm Team - Los Angeles, California 10
Project: Cryogenic SpyderBot Swarms for Lunar Permanently Shaded Regions.
California State University Fresno, Team: Bulldog Virtual Interface - Fresno, California 11
Project: Enhancing spacecraft cockpits with user interfaces in virtual reality
California State University Northridge, Team: Matador Student Design - Northridge, California 12
Project: Matador Star Dust Collector
Central Carolina Technical College, Team: Solar Titans - Sumter, South Carolina 13
Project: Novel Methods for Deploying Solar Arrays on the Moon
Clayton State University, Team: Laker C-Engines - Morrow, Georgia 14
Project: Intuitive Optimization for Spacecraft Guidance Navigation & Control
Fayetteville State University, Team: Bronco Blue Bots - Fayetteville, North Carolina 15
Project: Detection of Specific Environmental Features and Teammate Robots with Fusion of LIDAR and Camera Images
Georgia Gwinnett College - H-3206, Team: Grizzly Bears - Lawrenceville, Georgia 16
Project: Structural Analysis Using Contactless Evaluation (S.A.U.C.E-2.0)
Georgia State University, Team: Student Innovation Team - Atlanta, Georgia 17
Project: Motion-Sensing, Viewer-Tracking OLED Window Visualizing Virtual Environments
Hillsborough Community College, Team: Dustbusters - Tampa, Florida 18
Project: Magnetic Mesh Particle Filter
Inter American University of Puerto Rico - Bayamon Campus, Team: Inter Space - Bayamon, Puerto Rico 19 Project: Adaptable Rover Platform of the Inter American University of Puerto Rico (ARPI) Johnson C. Smith University, Team: The Innovative Bulls - Charlotte, North Carolina 20 Project: The Limitless Flight Project Lone Star College - CyFair, Team: Castor - Cypress, Texas 21 Project: Design a Novel Dust-Tolerant Connector for Cryogenic Fluid Transfer on Lunar Base of Operations Mclennan Community College, Team: Atlas - Waco, Texas 22 Project: Project Pleiades Metropolitan State University Denver, Team: MSU Denver Robotics Club - Denver, Colorado 23 Project: Simulation of Lunar Resource Discovery via Ground Penetrating Radar Robot Swarm New Mexico Institute of Mining and Technology, Team: Rolling Miners - Socorro, New Mexico 24 Project: Bio-inspired Swarming Pillbots for Lunar Element and Compound Detection Santa Monica College, Team: AstroMonica - Santa Monica, California 25 Project: Lunar Dust Repellent Coatings for Dust Mitigation on Sensitive Hardware Sonoma State University, Team: Seawolf - Rohnert Park, California 26 Project: Obstacle Detection Vision System Texas State University, Team: The Bobcat CaerusCrete - San Marcos, Texas 27 Project: Geopolymer for Future Lunar 3D Construction The New Mexico Institute of Mining and Technology, Team: The Miner 49ers - Socorro, New Mexico 28 Project: Lunar Excavator Damage Monitoring by Use of Acoustic Emission Sensor Matrix The University of Texas at Austin, Team: Project A.R.E.S. - Austin, Texas 29 In collaboration with: Austin Community College - Austin, Texas Project: Automated Rovers for Exploration and Site preparation (A.R.E.S.) The University of Texas Rio Grande Valley, Team: Vaqueros - Edinburg, Texas 30 Project: Autonomous Lunar Landing and Repositioning Control System Triton College, Team: Dirty Dust Diggers - River Grove, Illinois 31 In collaboration with: Fisk University - Nashville, Tennessee Project: In-Situ Hydrogen Peroxide Powered Steam Shovel for Robotic Miner Triton Community College, Team: Team GoGo - River Grove, Illinois 32 In collaboration with: Fisk University - Nashville, Tennessee Project: Development of a Thruster Using In-Situ Hydrogen Peroxide Propellant University of Arizona, Team: The Arizona WildSpaceCats - Tucson, Arizona 33 Project: Human Retrieval System
University of California Santa Barbara, Team: Melt - Santa Barbara, California 34 Project: Thermally Insulated Directed Energy Lunar Rover (TIDEL Rover) University of Central Florida, Team: Dr. Regolith - Orlando, Florida 35 Project: In-situ Utilization of Lunar and Planetary Regolith for Sensor Development University of Central Florida, Team: SenseAid - Orlando, Florida 36 Project: 3D Printing of Engineered Materials in Microgravity University of Houston Clear Lake, Team: Spider Fighters - Houston, Texas 37 Project: Spider Bot University of New Mexico, Team: Chili House - Albuquerque, New Mexico 38 Project: Plant Controlled Robots - autonomous cultivation for Artemis University of North Texas, Team: The Solar Eagles - Denton, Texas 39 Project: Deep Neural Networks for Mission Success. University of Puerto Rico Rio Piedras, Team: Alga-Rete - San Juan, Puerto Rico 40 In collaboration with: University of Puerto Rico Mayaguez - Mayaguez, Puerto Rico Project: A Sustainable Chamber System to Grow Microalgae for the Artemis Mission University of Texas Rio Grande Valley, Team: Team Starbase - Brownsville, Texas 41 Project: Power and Water Generating Liquid Waste Manager University of the District of Columbia, Team: Firebird Dust Extinguisher - Washington, District of Columbia 42 Project: Lunar Dust Mitigation Technique for Spacesuits University of the District of Columbia, Team: Wax On, Wane Off - Washington, District of Columbia 43 Project: Design and Development of Novel Solar Array Deployment System

Alabama A&M University AirGIS Normal, AL Project Title: Mars Topographic Map Generation with Artificial Intelligence Feature Detection Abstract: In support of NASA’s Artemis program and space exploration mission, multiple collaborative robotics can play a critical role in the unknown environment. An autonomous drone fleet will be assembled to collect data via sensors for generating a topographic map of Mars will aide in taking the next giant leap in exploration of Mars. Mars topographic map generation with computer vision feature detection by a drone fleet will be developed through an artificial intelligence vision processing with a real-world field test.
Albany State University NASA ROVER AI-EYES Albany, GA Project Title: NASA-ROVER-AI-EYES: Using Tensorflow to detect craters on Mars Abstract: Using Tensorflow to detect and classify Craters on Mars Rovers Dr. Robert Steven Owor Albany State University Abstract ASU will utilize Tensor flow to write machine-learning algorithms for machine vision, object recognition and specifically for crater detection and classification on Mars using NASA Rovers. This research extends the work done last year in which we wrote machine learning algorithms for the detection of craters. This research extends the work done last year. The study presents the development and implementation of deep learning algorithms for automatic detection and classification and cataloging of craters on the planet Mars using Tensor flow.

Blackfeet Community College Concept Squad Browning, MT Project Title: Researching Lunar Dust's Chemical Composition to Find a Solution to Nasa's Regolith Adhesion Dilemma. Abstract: Blackfeet Community College Physics Students will be researching Lunar Dust's chemical and energy composition to find a solution to Nasa's regolith adhesion dilemma. By recreating a lunar environment and studying different chemical coatings that will repel Lunar dust from an astronaut's space suit will encourage a safer and successful Artemis Mission.
Bunker Hill Community College Bunker-Backers Boston, MA Project Title: Soft Exo-suit for Astronaut Physical Therapy Abstract: Prolonged space missions can sometimes pose certain dangers on the well-being of an astronaut’s body. One of the most severe of such dangers would be the back pain caused by the mass losses in bone density and muscles that are present in the lower body when an astronaut experiences decreased gravity for a prolonged term. Astronauts lose on average 1% to 2% of their bone mineral density just like muscles. To prevent that, we came up with a design that simulates the Earth’s gravity specifically on the muscles that are present in the lower body by applying resistance on them.
California State Polytechnic University Pomona Kepler-452b Quantum Pomona, California Project Title: Low-Power reconfigurable processor for securing space applications using post-quantum cryptographic algorithms Abstract: Once the quantum computers exist, there is a risk creating chaos of losing all the services, which depends on the current security primitives we are dealing with in securing the data communications as nuclear power plants, bank transactions, satellite communications, etc. We are working on delivering a new dynamic reconfigurable processor to secure future space communication using post-quantum cryptographic primitives. As NIST announced the need of having a set of cryptographic primitives resist the existence of the Shor algorithm that uses a large scale of qubits quantum computers to break the conventional crypto primitives.
California State Polytechnic University Pomona TOI-1231b Pomona, CA Project Title: Low-Power Flight Controller using Raspberry Pico and FPGA for drones' applications Abstract: This project is proposing a new flight controller that depends on using FPGA and Raspberry Pico to replace the existing solutions like Pixhawk and Navio2, which are not considered reliable controllers. Moreover, a new distributed computing mechanism based on Flink will be introduced. The new system will allow us to realize the first drone docking mechanism for exchanging power between flying drones and exchanging the power of computing between the flying drones in a swarm fashion. The proposed flight controller will be using the Fprime flight software which is developed by JPL/NASA and currently used on Mars Helicopter.
California State University Los Angeles Cryo-Swarm Team Los Angeles, CA Project Title: Cryogenic SpyderBot Swarms for Lunar Permanently Shaded Regions. Abstract: The Cal State LA Cryo-Swarm Team will develop a new robotic swarm technology platform for In-Situ Resource Utilization (ISRU), that supports the NASA Artemis Mission objective of returning astronauts to the moon and the establishment of a sustainable presence, i.e., a Lunar Base Station. The Cryo-Swarm Team will design a lunar science mission that enables the delivery of a cryogenically rugged Hexapod Lander, i.e., a Cryo-SpyderBot, to Lunar permanently-shaded-regions (PSRs). The Cryo-SpyderBots would directly detect the presence of water- ice, measure regolith composition, and map the PSR terrain, in coordination with other robotic platforms at the lunar surface.
California State University, Fresno Bulldog Virtual Interface Fresno, CA Project Title: Enhancing spacecraft cockpits with user interfaces in virtual reality Abstract: The goal of this project is to design, implement, and compare different virtual keyboards in fully immersive virtual reality and to study visual ergonomics in cockpits. Virtual Reality can be used for different purposes: for training, simulating real experiences for preparing missions, and for reducing the amount of physical elements that are placed in the spacecraft. People are subjects to errors when performing long tedious tasks that require continuous attention, in an environment that pushes human abilities, with different types of interactions. It is therefore important to provide human interfaces minimizing human error and provide optimal feedback to users.
California State University, Northridge Matador Student Design Northridge, CA Project Title: Matador Star Dust Collector Abstract: The purpose of our project is to develop a swarm of cube satellites that will deploy unipolar electro-adhesive electrodes in an effort to collect and mitigate space debris. This debris, classified as "micro-meteoroids," can be categorized as large inactive satellites or a small speck of paint and are traveling thousands of miles per hour in Earth's orbit. Our objective is to develop the technology that will primarily focus on the small particles that are highly difficult to detect and track in an effort to reduce the risks of collision that can lead to devastating results.
Central Carolina Tehcnical College Solar Titans Sumter, SC Project Title: Novel Methods for Deploying Solar Arrays on the Moon Abstract: This project is in support on the NASA Minds goal of deploying solar arrays on the South Pole of the Moon. In this project we present several novel ideas and designs for construction of solar arrays and for deployment of those solar arrays on the Moon. Our guiding design philosophy is simplicity of design, efficiency of processes, and extensive use of COTS (Commercial off the Shelf) materials. The assumption behind these designs is that mechanisms can be partially or completely created on Earth and brought to workshops on the Moon for new solar array construction or solar array maintainance.
Clayton State University Laker C-Engines Morrow, GA Project Title: Intuitive Optimization for Spacecraft Guidance Navigation & Control Abstract: This project seeks to aid the Artemis Mission by participating in the development of an autonomous onboard guidance, navigation, and control system. An onboard system of this kind would provide a vast array of benefits for this and future missions that include the ability to provide faster response times to navigational errors and hazard avoidance, less dependence on ground control systems and reduced network bandwidth consumption. We intend to use computer/machine vision algorithms built on open source frameworks like OpenCV, Caffe, TensorFlow, and Keras, while at the same time building for portability by making it deployable on cFS.
Fayetteville State University Bronco Blue Bots Fayetteville, NC Project Title: Detection of Specific Environmental Features and Teammate Robots with Fusion of LIDAR and Camera Images Abstract: Swarm robotics in an important part of NASA’s Artemis Mission. In swarm robotics a large number of relatively simple physically embodied agents can be designed such that a desired collective behavior emerges from the local interactions among agents and between the agents and the environment. Collective understanding of shapes in the environment and of shapes of nearby robots in the team is an important task since these can create more “shape aware” local interactions and emergence of desirable collective behaviors.
Georgia Gwinnett College - H-3206 Grizzly Bears Lawrenceville, GA Project Title: Structural Analysis Using Contactless Evaluation (S.A.U.C.E-2.0) Abstract: As an extension of our previous NASA MINDS project (H.A.M-S.A.U.C.E), our proposed system will assess and monitor the structural integrity of manufactured structures by utilizing object detection technologies as well as incorporate thermal imaging and vibrational monitors. Due to S.A.U.C.E-2.0’s compatibility with robotic arms and highly portable nature, the proposed system can operate in both easily accessible and inaccessible locations for humans. We believe that S.A.U.C.E-2.0 would be useful to support NASA’s Artemis mission by enabling them to detect structural deformities, then transfer the data to a more centralized location for further analysis and remediation.
Georgia State University Student Innovation Team Atlanta, GA Project Title: Motion-Sensing, Viewer-Tracking OLED Window Visualizing Virtual Environments Abstract: This project supports NASA’s Artemis mission by designing, creating, and upkeeping technology and software that supports the psychological well-being of the Artemis mission crew, through the implementation of an OLED/LED screen to display various geographical locations around Earth. To, 250,000 miles away from home, be able to see their home cities, stay up-to-date with the world’s capitals, and to reminisce about Earth’s nature will benefit the prolonged mental and emotional wellbeing of the astronauts of the Artemis mission.
Hillsborough Community College Dustbusters Tampa, FL Project Title: Magnetic Mesh Particle Filter Abstract: The most prevalent problem plaguing future lunar missions is the damage and danger posed by lunar regolith. We are seeking to develop a mitigation strategy to exploit the evenly dispersed nanoparticles of iron by using a magnetized metal mesh to capture the regolith out of spacecraft. This mitigation strategy turns the destructive dust problem into a question of filter maintenance. This mitigation technique may also double as a particle detection mechanism. We envision that this solution will be deployed in multiple phases since we recognize that dust will more likely than not get through the initial location.
Inter American University of Puerto Rico - Bayamon Campus Inter Space Bayamon, PR Project Title: Adaptable Rover Platform of the Inter American University of Puerto Rico (ARPI) Abstract: The Inter Space team propose a medium-sized lunar rover to carry an assortment of landing pad construction technologies. Those technologies are provided by others as interchangeable payloads to go on the rover, and they include: microwave sintering system to sinter the soil under the lander into a solid surface; polymer spray system to “glue” the lunar soil into a solid surface; rock rake to collect rocks out of the shallow subsurface of the lunar soil; a tamping unit to compact the soil under the vehicle; a bulldozer blade
Johnson C. Smith University The Innovative Bulls Charlotte, NC Project Title: The Limitless Flight Project Abstract: The Limitless Flight Project plan is to design a drone called Limitless to withstand low atmospheric pressure on Mars. Limitless will be developed to have a low weight with long and fast spinning propellers and created in a 3D printer. Our team will then test Limitless in a vacuum chamber to see the lowest possible atmospheric pressure needed for an object to take flight. The Limitless Flight Project would help forward the conversation on aerodynamics, the atmospheric pressure needed to fly, and the theoretical possibility of commercial air travel on Mars.
Lone Star College - CyFair CASTOR Cypress, TX Project Title: Design a Novel Dust-Tolerant Connector for Cryogenic Fluid Transfer on Lunar Base of Operations Abstract: Team CASTOR plans to design a novel dust-tolerant connector for cryogenic fluid transfer on the moon that can successfully mitigate the effects of lunar regolith to cryogenic supply lines, such as lunar regolith intrusion, corrosion, and magnetic effects. The team will optimize the design for reliable performance during operations in the harsh lunar environment with extreme temperatures. Key considerations include dust-tolerance, ease of use, operator safety, and reliability/affordability of materials to be used.
Mclennan Community College ATLAS Waco, TX Project Title: PROJECT PLEIADES Abstract: The ATLAS team was started to put the knowledge we as students are gaining through our respected engineering programs to use. McLennan Community College has allowed us as students the opportunity, resources, and guidance needed to make a measurable difference in the Artemis program. Team Atlas is comprised of some of the top engineering students at MCC; we aim to develop our engineering mind's, so by the time we are looking for full time employment, we will exceed expectations. We aim to develop an anchor point so well crafted that NASA will see fit to send it to the moon.
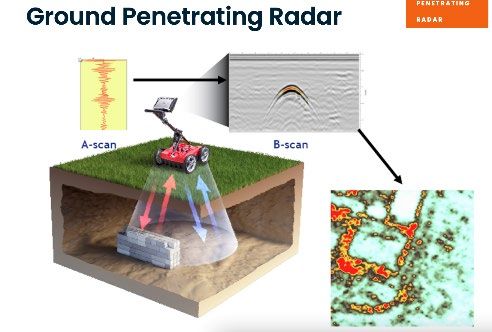
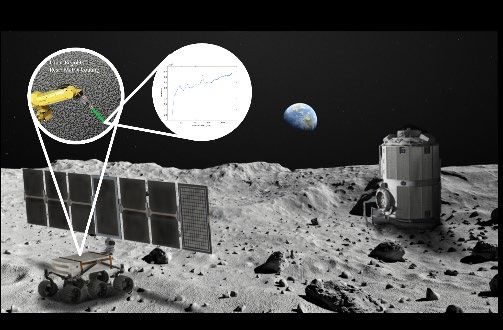
Metropolitan State University Denver MSU Denver Robotics Club Denver, CO Project Title: Simulation of Lunar Resource Discovery via Ground Penetrating Radar Robot Swarm Abstract: MSU Denver’s Robotics Club is creating a simulation of cooperative subsurface mapping via a swarm of novel GPR equipped robots. This project seeks to explore the optimization of cooperative information gathering among a swarm of robots while reducing the total energy cost.
New Mexico Institute of Mining and Technology Rolling Miners Socorro, NM Project Title: Bio-inspired Swarming Pillbots for Lunar Element and Compound Detection Abstract: The proposed biologically inspired swarm of Pillbots will possess the ability to walk and roll on lunar surfaces as a pill bug do. The robot is designed to explore, dig, and detect materials and resources on the Moon surface or underground. Each robot's appendage will contain interchangeable mechanisms that provide diverse functionalities to aid the Pillbots as they go out on missions. Like a swarm of robots, the Pillbots will communicate and locate each other while doing different or similar tasks. This will allow furthering different types of research on the Moon.
Santa Monica College AstroMonica Santa Monica, CA Project Title: Lunar Dust Repellent Coatings for Dust Mitigation on Sensitive Hardware Abstract: We would like to compare systematically the efficacies of superhydrophobic surfaces (biomimicry of the lotus plant), magnetic mesh coatings, and electrostatic mesh coatings, as dust repellent strategies for the problem of lunar dust mitigation. We seek to fabricate a simple prototype of each strategy: a simple superhydrophobic coating (applied as liquid and subsequently cured or dried); a metallic, electromagnetic mesh that would coat or drape over sensitive hardware; a simple, a metallic, electrostatic mesh that would coat or drape over sensitive hardware. Our team is numerous enough for us to divide into sub-teams dedicated to each strategy.
Sonoma State University Seawolf Rohernt Park, CA Project Title: Sonoma State University NASA MINDS Obstacle Detection Vision System Abstract: The Sonoma State University MINDS project is to create a software package that uses cameras and other sensors to detect obstacles for autonomous vehicles. This software package will be tailored to navigation around obstacles on the lunar surface. The obstacle detection system will provide feedback to a human operator to show obstacles near a robotic or crewed vehicle.
Texas State University The Bobcat CaerusCrete San Marcos, TX Project Title: Geopolymer for Future Lunar 3D Construction Abstract: The goal of the project is to develop a geopolymer for lunar 3D construction using a lunar regolith simulant. The developed material will be conditioned in an environmental chamber that simulates lunar temperature. A rheometer will be used to study the rheological behavior of the developed material. Subsequently, mechanical performance evaluation of the material will be conducted to prove that it has sufficient strength for the construction of future colonies on the Moon. The outcome of this project will provide NASA a potential solution to additive construction using in-situ resources on the Moon.
The New Mexico Institute of Mining and Technology The Miner 49ers Socorro, NM Project Title: Lunar Excavator Damage Monitoring by Use of Acoustic Emission Sensor Matrix Abstract: An early damage detection system for lunar excavators is proposed. The acoustic emissions of simulated lunar hazards will be collected and analyzed. An array of piezoelectric sensors will be instrumented onto the dumping mechanism of a prototype lunar excavator. The sensor matrix will allow mission control to sense, detect, locate, and characterize lunar hazard damage inflicted on the robots. A prognosis of the robots remaining life will also be provided. Such a system will lengthen the time and usefulness of lunar excavators that will reliably collect resources for the Artemis research base.
The University of Texas at Austin Project A.R.E.S. Austin, Texas In collaboration with: Austin Community College Austin, Texas Project Title: Automated Rovers for Exploration and Site preparation (A.R.E.S.) Abstract: Automated Rovers for Exploration and Site preparation (A.R.E.S.) is a solution to lunar landing site preparation and mapping which utilizes swarming hexapods. Each rover will be able to use their front two limbs to lift objects and clear debris and will communicate with each other to move larger objects if necessary. Using multiple stereo cameras, the robots will gather visual features from the surroundings to create a globally accurate map and tag features of interest. They will then use this data to remove debris and prepare the area for the arrival of the Artemis crew.
The University of Texas Rio Grande Valley Vaqueros Edinburg, TX Project Title: Autonomous Lunar Landing and Repositioning Control System Abstract: Team Vaqueros from the University of Texas Rio Grande Valley is creating a control system that can easily maneuver a Lunar lander through the low gravity of the moon when descending and repositioning. Our goal is to continuously test this system on a lander and simulate the results on a program. The simulation will precisely estimate the efficiency that our control system will have on the moon. Team Vaqueros also plans to share the excitement to the younger generation of the Artemis mission by performing a demonstration of the control system in front of an audience.
Triton College Dirty Dust Diggers River Grove, IL In collaboration with: Fisk University Nashville, TN Project Title: In-Situ Hydrogen Peroxide Powered Steam Shovel for Robotic Miner Abstract: The High Concentration Hydrogen Peroxide (HTP) powered steam shovel for a robotic miner will be designed as an in-situ resource utilization to effectively mine mafic-type soil on Mars. This miner provides a sustainable mission with water as the main source of energy. Hydrogen peroxide would be derived from the hydrogen and oxygen molecules found in water on Mars. The miner is designed with Computer Assisted Design (CAD) drawings, 3D printers, and Computer Numerical Control (CNC) Machining.
Triton Community College Team GoGo River Grove, IL In collaboration with: Fisk University Nashville, TN Project Title: Development of a Thruster Using In-Situ Hydrogen Peroxide Propellant Abstract: Our team has developed a thruster using in-situ Hydrogen Peroxide with Manganese Oxide as a catalyst, to yielding high pressure steam and oxygen. When released, the high pressure gasses will expand out a converging/diverging nozzle to produce thrust. This will create a force that will propel a spacecraft.
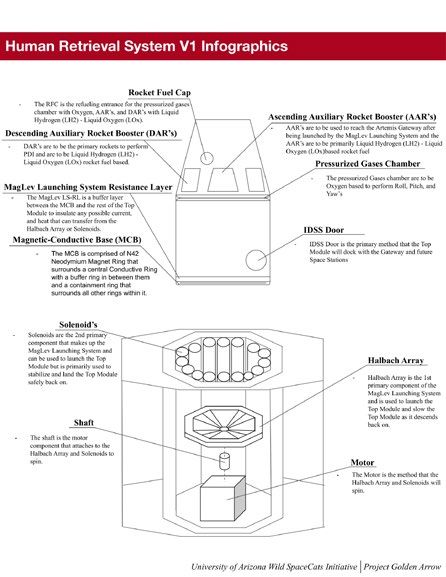
University of Arizona The Arizona WildSpaceCats Tucson, AZ Project Title: Human Retrieval System Abstract: The University of Arizona WildSpaceCats is designing a Lunar Lander that works as a Human Retrieval System for SpaceX’s Human Landing System. The Arizona WildSpaceCats is aiming to help both NASA Artemis and SpaceX's ultimate goal for human colonization on the Moon, Mars and beyond. Our designs addresses the cost for human colonization, reduce fuel needed to travel in space, maximizing use of lunar resources, recycle, safety for interstellar travel and simplicity of use. Neil Armstrong remarked “That's one small step for man, one giant leap for mankind." but this is the beginning of humanities mark in our universe’s history.
University of California, Santa Barbara MELT Santa Barbara, California Project Title: Thermally Insulated Directed Energy Lunar Rover (TIDEL Rover) Abstract: The TIDEL Rover team offers a lunar exploration method utilizing directed energy placed on an autonomous rover. Lunar exploration, especially in Artemis-program areas of interest such as lunar PSRs, require innovative solutions to provide rover power over long distances. Using directed energy, the team proposes a rover system with a light-sensitive panel to convert power from the beamed laser into mechanical energy for lunar exploration. In order to make this a sustainable vehicle, thermal insulation chambers will be concurrently developed. These chambers will house rover electronics and protect them from degradation due to harsh lunar temperatures experienced during lunar night.
University of Central Florida Dr. Regolith Orlando, FL Project Title: In-situ Utilization of Lunar and Planetary Regolith for Sensor Development Abstract: Structural health monitoring is a critical process for structural components in space environments. Missions to explore other planetary surfaces, such as the Artemis mission are of interest. Sensors that can monitor the integrity of these components will be developed using in-situ resources. Lunar Regolith contains similar properties previously observed in sensing materials which indicates a high possibility of the presence of damage-sensing properties. This investigation will allow a significant reduction of launch mass and cost by using resources collected in the region of exploration.
University of Central Florida SenseAid Orlando, FL Project Title: 3D Printing of Engineered Materials in Microgravity Abstract: We strive to design an Autonomous 3D Printer for microgravity that will be capable of onsite printing of engineered materials. The printer will use particle-polymer systems as print media. This will open possibilities for printing essential functional materials in low-gravity environments. Functional materials have a vital role in space exploration systems and can provide extensions of the life of exploration rovers, landers, and aerial systems.
University of Houston Clear Lake Spider Fighters Houston, TX Project Title: Spider Bot Abstract: Our project is to design a spider-bot able to assist in certain life-threatening issues. We intend to develop a fast and reliable device that can deliver life-saving medical aid in the form of providing a stabilized atmosphere that provides oxygen, repair supplies, and crucial spare time for other personnel to save and rescue the patient. Our team is composed of university students that are passionate about our spider-bot project, hoping to ensure the safety of astronauts and reduce the dangers space exploration holds.
University of New Mexico CHILI HOUSE Albuquerque, NM Project Title: Plant Controlled Robots - autonomous cultivation for Artemis Abstract: We are a multidisciplinary team whose goal is to develop innovative techniques to grow crops autonomously on the surface of the moon and Mars for Artemis Astronauts. We will accomplish this by using autonomous robots to monitor and water crops growing in 3D printed structures that we make from simulated in situ resources. Plant water needs will be measured by wearable plant sensors that our autonomous robots will use to control watering. We will grow New Mexico chile peppers for our experiments since these are currently producing the first fruits for astronauts to eat on the International Space Station.
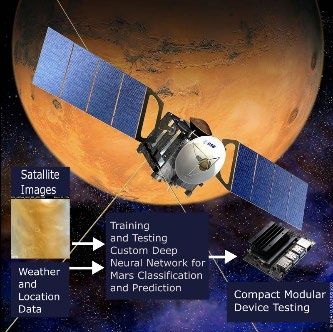
University of North Texas The Solar Eagles Denton, TX Project Title: Deep Neural Networks for Mission Success. Abstract: Our group will design a deep neural network that would be able to analyze data from systems that are currently in place including satellites and sensors. The proposed network will accurately predict future conditions on Mars from past data.
University of Puerto Rico Rio Piedras Alga-Rete Rio Piedras, PR In collaboration with: University of Puerto Rico Mayaguez Campus Mayaguez, PR Project Title: A Sustainable Chamber System to Grow Microalgae for the Artemis Mission Abstract: Our project wants to bring sustainable products to space. During the space mission the less they bring the better, only what is required. With our project, we want to show that microalgae can have many uses, even as a construction material. We are proposing to build a growth chamber known as “VEGGIE” using 3D printing with an algae-based filament and a biodegradable algae-based culture bag where the microalgae will grow in.
University of Texas Rio Grande Valley Team Starbase Brownsville, TX Project Title: Power and Water Generating Liquid Waste Manager Abstract: The Power and Water Generating Liquid Waste Manager is a multipurpose system designed for the filtration of liquid waste(urine, gray water, black water) and the electrolysis of water for use in a hydrogen fuel cell system. Essentially, liquid waste is processed and, if needed, electrolyzed into hydrogen and oxygen with solar power for later use in a fuel cell, functioning as a chemical battery in emergencies or situations in which solar power will be temporarily non-viable.
University of the District of Columbia Firebird Dust Extinguisher Washington, DC Project Title: Lunar Dust Mitigation Technique for Spacesuits Abstract: In this 2022 NASA MINDS project, we propose a novel coating technique to further enhance the cleaning performance of available Electrostatic Cleaning Systems to mitigate lunar dust from spacesuits.
University of the District of Columbia Wax On, Wane Off Washington, DC Project Title: Design and Development of Novel Solar Array Deployment System Abstract: Fictional space colonies have been a part of popular culture for more than a century. Movies like “Austin Powers” and “Despicable Me” have lunar aspects we’ve only dreamed of achieving. MUREP has given us a unique opportunity to turn dreams into reality through our design to develop a compact and retractable deployment system for a solar array. As participants of NASA MINDS our goal is to inspire the next generation to not only dream big but have the courage to make it happen.
You can also read