Measurement, Instrumentation, Control and Analysis - MIT Ian Hunter and Lynette Jones Department of Mechanical Engineering, 12 June, 2020
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Measurement, Instrumentation, Control and Analysis Ian Hunter and Lynette Jones Department of Mechanical Engineering, MIT 12 June, 2020 Ian Hunter Lynette Jones

MIT PSSC (Physical Science Study Committee) According to its Wikipedia entry: By the 1964–1965 school year, about half the US students enrolled in high school physics (200,000 students, 5000 teachers) were reportedly using the PSSC course materials. https://en.wikipedia.org/wiki/Physical_Science_Study_Committee https://www.compadre.org/portal/pssc/pssc.cfm https://archive.org/details/reviewofphysical00daes/mode/2up Ian Hunter was taught high school physics in New Zealand using the PSSC modular component kits and text book.

Build It Use It Heathkit Pasco Use It Mechanno Vernier Undergrad: 2.671 Measurement and Ramsey, Arbor Instrumentation Elecraft, Leybold Jameco, Build It and Use IT TenTec, Didac, Graduate: 2.131 Advanced Kelvin, EduTek, Instrumentation and Elenco 3B Sci, Measurement Turbine Tech, Lego Nvis Tech, TecQuip, https://www.electronicdesign.com/home/whitepaper LabTek, AtiCo /21803813/whatever-happened-to-heathkit-pdf
Approach Can we design a system in which a minimal set of mechanical, electronic, optical and software components and building blocks can be used to create instruments (physical workstations) for performing experiments and analyses on a wide range of phenomena in STEM areas? Can these Workstations be built by the student for their own use or for the use by others? Can these Workstations be used for one-on-one interactions with students? Can the Workstations be used to determine a student’s understanding of an area … model a student’s specific knowledge?

Hierarchy Clusters Suite of Lab course Workstations, lecture topic, particular STEM theme (e.g., the environment, energy) Workstations Implement a set of experiments: system measurements Modules Signal measurements Elements PCBs, pumps, translation stages Components Chips, resistors, transistors, LEDs

Mechanical Components

Motors and Actuators
Pneumatic and Hydraulic Components

Optical Components Note: a new set of optical components are being developed based on the use of fused quartz rails.

Electronic Building Blocks Combination of TinkerForge, custom built modules and others Master Interface WiFi Interface Ethernet (PoE) Interface IMU A10 s Microcontroller PWM Controller Micro Step Motor Controller GPS FLIR IR Thermal Imager Thermocouple Interface Force Sensor Hall Effect Color Sensor Current Voltage Sound Pressure Barometer Accelerometer RTD Interface Interface
Modules Ambient Light UV Light IR Temperature Humidity, Air Quality, Barometric Pressure, Temperature Barometric Pressure, Sound pressure Altitude (including real time power spectrum) WiFi: 802.11, 100 kJ battery energy, typical draw 0.8 W, Air Quality, 1.5 days recording Barometric pressure, Temperature
Bluetooth Communication 20 mm x 20 mm Dr. Craig Cheney Dr. Peter Dourmashkin Physics Inertial Measurement Unit (IMU) kit used in MIT 8.01 (Physics I).
Using MICA to teach the inner workings of MEMS accelerometers.
500 Structural Components 400 25 mm × 25 mm anodized aluminum 350 extrusions 300 250 200 brackets 150 100 50 M3, M4, and M5 insertion nuts
Each physical MICA Handle for carrying Workstation has a CAD counterpart. A large number of custom MICA PCBs have been designed (wireless BT IMUs), filters, power amplifiers, very low current amplifiers, high voltage (very low current) amplifiers, etc Digilent Analog Discovery 2 (100 MHz, dual 14 bit differential ADCs) and Usually 2 x 21700 cells (~100 kJ energy) Impedance module used in many Workstations with data TinkerForge bricks and bricklets used transfer to Mathematica for extensively (24 bit, 1 kHz ADCs), many analysis sensors, step motor and PWM controllers. Each PCB has a viewable circuit layout and in some cases a SPICE model Misumi 25 x 25 mm black Kristan Hilby Mech. Eng. Grad. student anodized Al extrusion rails
MICA Workstation Assembly Video
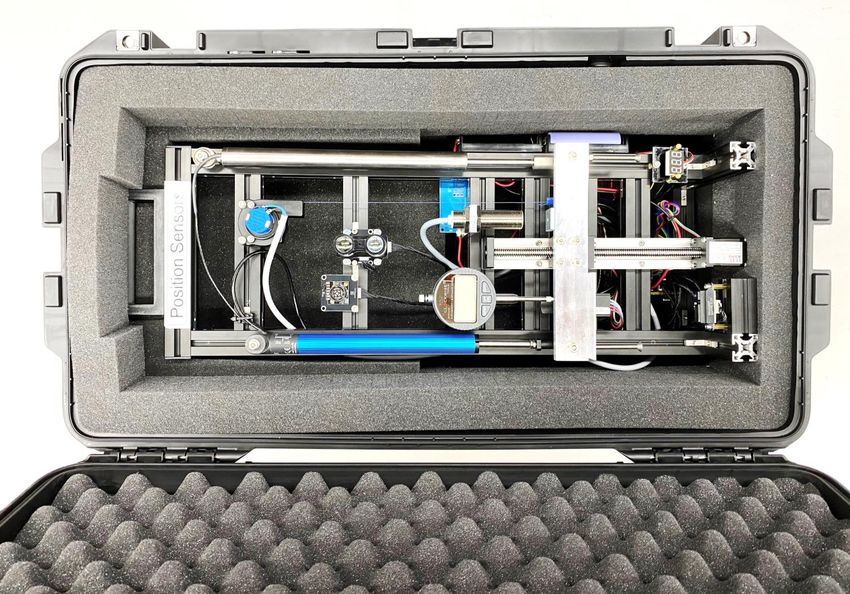
MICA Workstation: Mechanical Dynamics A steel ruler (beam) is clamped at one end and driven by a Lorentz force coil and magnetic circuit at the other end. Position is measured via an inductive sensor. Various linear system identification techniques are used to Magnetic clamp determine both nonparametric as well parametric models up to 4th order. In addition to step and swept sin testing, stochastic inputs (Gaussian white Flexible beam noise, binary nonwhite noise, etc) are used to teach about probability density functions, auto- and cross-correlation, Toeplitz matrix inversion, Inductive position Fourier and Laplace transforms, system impulse response functions, sensor frequency response functions, transfer functions, parameter estimation, nonlinear minimization, objective functions, sensitivity function, analysis of µ-step motor to residuals, Akaike information criterion, model order selection. position damper Flexible beam Copper eddy µ-step motor stage current damper to position damper Magnets (mass) Magnetic circuit (mass) Lorentz force coil µ-step motor to Lorentz force coil calibrate position Copper eddy sensor and to current damper measure static stress strain of beam
MICA Software Evolution 1985 1990 1995 2000 2005 2010 2015 2020 MACSYMA Computer Language requirements: • Every measurement requires: value, time (space) stamp, units (metric), ±uncertainty • Symbolic and numeric computation (e.g., numeric and symbolic Fourier transforms) • Lumped parameter and continuum models (FEM) • Support for hardware control and quasi real time measurements (e.g., Prof. Craig Carter Dr. Nick Hunter-Jones 100 ns resolution time stamps) MIT DMSE Perimeter Institute for • Support for imaging, video analysis, molecular modeling, 3D Theoretical Physics visualization and CAD models • Potential to add e-tutor avatars Macsyma is a symbolic language written in LISP developed at MIT Thanks to Dr. Serge Lafontaine for creating the 100 ns timing capability in Mathematica Thanks to George Varnavides and Amina Matt in MIT DMSE for helping with Mathematica Nexus is a Matlab like numeric and symbolic language written by Ian Hunter
Designed and built remotely by 2020 2.131* USB or WiFi Connection student project group Can be remotely controlled via TeamViewer, Zoom (limited) or equivalent. WiFi (WiFi 802.11b/g/n) currently limited to 10 simultaneous 600 mm connections. Thanks to Dr. Serge Lafontaine for helping create the WiFi capability. Bluetooth Connection 2.1 & 4.2 Only for local communication with 200 mm local BT sensors *2.131 is the MIT Mech Eng graduate Advanced Instrumentation and Measurement course taught by Ian Hunter. 600 mm
Demo
Frequency Response Measurement Salem-Key analog second-order low-pass filter Scott Stephens DMSE grad. Now working for Sonos Thanks to Dr. Serge Lafontaine for the Sallen-Key filter PCB design Kits sent to students in 2.131 Advanced Instrumentation and Measurement course Thanks to Scott Stephens for the Digilent differential adapter PCB design
MICA Workstations fit within ~ 200 × 200 × 600 mm Transportation Shibani Joshi
Clusters Power over Ethernet (PoE) 7 MICA Workstations per PoE Switch Ethernet PoE 30 W/channel 10/100 Mbit/s (1 Gbit/s compatible) Control from MICA Mathematica Notebook … Currently 50 Workstations built with another 50 under development. Plans for another 100 Workstations over the next 2-3 years. Thanks to Dr. Serge Lafontaine for helping create the PoE capability.
Fundamental Constants ✓ Speed of light, c ✓ Magnetic constant, µ0 ✓ Electric constant, ε0 Newton’s gravitational constant, G ✓ Planks constant, h ✓ Elementary charge, e Electron mass, me ✓ Avogadro constant, NA ✓ Faraday constant, F ✓ Molar gas constant, R ✓ Boltzmann constant, k ✓ Electron volt, eV
MICA Workstations Under Development
Compact Mass Spectrometer 6th Gen µMS Dr. Brian Hemond MIT Mech Eng and EECS grad Curretly CTO Indigo Technologies 8th Gen Version being finalized now
Dr. Craig Cheney MICA Cloud Chamber
210Po Test Video
Chemical Sensors Fluorescence Quench Sensor Dr. Walker Inman MIT Mech Eng grad CEO Lucid Scientific Dissolved O2 gradient 96 dissolved O2 sensors in 96 well plate.
Potentiostat / Galvanostat 3 electrode Potentiostat Dr. Geehoon Park • Single channel • Potential sweep ±1.5 • Variable gain resistors (5 kΩ, 50 kΩ, 500 kΩ) and capacitors (100 pF, 1 nF, 10 nF) 2 electrode Galvanostat • Single channel • Maximum current: ±65 mA • Maximum potential: ±5V • Variable sensing resistors (10 Ω, 100 Ω, 1 kΩ)
MICA Miniature Gas Chromatograph Dr. Eli Paster MIT Mech Eng grad Currently CEO PolyJoule 200 180 ~20% Pentane; ~80% Heptane 160 Injection Amount: 20 nL Sample Rate: 20 Hz 140 Duration: ~8 min Impulse Response 120 100 80 60 40 20 0 -20 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 Time (s)
Dr. Cathy Hogan Prof. Craig Carter Dr. Barbara Hughey Dr. Peter Dourmashkin Dr. Adam Wahab Biology and Biochem Mathematica 2.671 and WTP Physics Atomic Force Microscope Annie Chen Dr. Nickolas Demas Vineet Padia Dr. Ashley Raynal Adam Spanbauer Plasmas Acoustic Spectrometer MICA Fabrication NMR Deep Learning
System ∞ ∞ = ℎ0 + න ℎ1 − ⅆ + ඵ ℎ2 1 , 2 − 1 − 2 ⅆ 1 ⅆ 2 + 0 0 ∞ ම ℎ3 1 , 2 , 3 − 1 − 2 − 3 ⅆ 1 ⅆ 2 ⅆ 3 + … + 0 ∞ ∞ න … න ℎ 1 , … , − 1 … − ⅆ 1 … ⅆ 0 0 the n-th order Volterra kernel, ℎ 1 , … , , can be regarded as a higher-order impulse response of Vito Volterra the system. (1860-1940) 1887
You can also read