Large-scale estimation of parking requirements for autonomous mobility on demand systems
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Large-scale estimation of parking requirements for autonomous mobility
on demand systems
Dániel Kondor1,∗ , Paolo Santi2,3 , Kakali Basak1 , Xiaohu Zhang1 , Carlo Ratti2
1
Singapore-MIT Alliance for Research and Technology, Singapore
2
Senseable City Laboratory, MIT, Cambridge MA 02139 USA
3
Istituto di Informatica e Telematica del CNR, Pisa, Italy
∗
E-mail: dkondor@mit.edu
August 20, 2018
arXiv:1808.05935v1 [physics.soc-ph] 17 Aug 2018
Abstract AMOD system will be significantly cheaper than both
private cars and taxis today [8, 9], even competitive with
Cities everywhere are anticipating new mobility technolo- public transit, thus having a potential for high adoption
gies to help solve issues with congestion and pollution rates after some initial period. This change will poten-
while providing afforable, accessible, reliable and conve- tially have a drastic effect on cities and urban mobility.
nient transportation for growing populations. The adop- On one hand, in more positive scenarios, the use of SAVs
tion of self-driving vehicles is projected to happen soon will result in more efficient traffic flows, significantly eas-
and help with achieving these goals, especially if part of ing congestion [10], while also allowing people to be more
a shared mobility on demand service. Potential benefits flexible with regards to mode choices and even better uti-
of such a system include a reduction of the number of lize public transportation options by solving the first- and
vehicles and freeing up parking spaces, while challenges last-mile problem of those journeys [11]. On the other
still include managing the traffic volume. Previous re- hand, the availability of a convenient, reliable and cheap
search focused on estimating fleet size in different scenar- transportation option provided by an AMOD system can
ios. In this work, we focus on estimating minimum fleet generate significant induced demand and thus contribute
size, parking needs and total travel distance for an au- to higher traffic flows, offsetting gains from more efficient
tonomous mobility on demand solution serving all trips traffic, similarly to how infrastructure improvements are
made in private vehicles in Singapore, generated from often followed by further increased traffic and conges-
a comprehensive simulation of the city’s mobility. We tion [6, 12, 2]. Nevertheless, a significant change from
specifically focus on parking demand as currently a sig- privately owned cars is an expected reduction in the to-
nificant amount of space has to be designated as park- tal number of cars, with much higher utilization ratios.
ing in cities, which is poised to become obsolate if people Previous studies estimate potential reductions of fleet size
switch from private vehicles to shared ones which are uti- between 40% to 90% [7, 13, 8, 14] accompanied by similar
lized much more efficiently. We show that over 85% re- reduction in the need for parking as well [15, 16].
duction in the number of vehicles and parking spaces can While nowadays parked vehicles take up a tremendous
be achieved while serving all trips made currently in pri- amount of space and places constraints on planning, there
vate vehicles. We further show that potential increased is relatively few quantitative research on characterizing
traffic volume can be mitigated with the incorporation the extent of this. The work of Chester et al. [17] re-
of ride-sharing, while offering even higher savings, up to veals that cities like Los Angeles can have up to 3.3 park-
92% in both fleet size and parking needs. ing spaces per car, with the total areas of parking being
1.4 times larger than the total area dedicated to roads
and equivalent to 14% of total incorporated land area in
1 Introduction Los Angeles County. Recent work by Szell [18] based on
data from OpenStreetMap finds significantly lower num-
A major technological shift expected to take place in bers, mainly as the study only focuses on surface area
the following decades is the adoption of autonomous taken up by parking structures, as reliably estimating
(self-driving) vehicles [1, 2]. There are many potential the count of individual parking spaces might not be pos-
consequences and scenarios how self-driving will change sible for many cities. Beside the obvious effect of taking
transportation and mobility. While previous studies esti- up valueable space, policies related to parking contribute
mate only a relatively slow adoption rate in private vehi- significantly to city developement via influences on trans-
cles [3, 4], several authors expect a significant shift from portation, mode choices and constraints on design and
the privately owned car to using shared autonomous ve- developement possibilities [20, 21, 22, 23]. With regards
hicled (SAVs) [5, 6, 7, 8]. It is expected that in many to autonomous vehicles, Nourinejad et al. [19] find that a
cases, especially in dense cities, an autonomous mobil- significant amount of space could be saved due to the cars
ity on demand (AMOD) system will offer more conve- parking themselves more densely than human drivers can
nience and better availability than owning and operating achieve.
a private car. Furthermore it is expected that using an Beside AVs, several technological advances and avail-
1
ability of large datasets resulted in studies showing po- parking and total travel distance. Larger values will al-
tential gains in efficiency in urban traffic even with tech- low for more optimizations in dispatching, thus smaller
nologies that have already become widely available. Pre- fleet sizes and less parking demand at the expense of
vious work utilizing taxi ride data [24, 25, 26] showed that more travel. We use a greedy heuristic estimator (Algo-
almost all taxi trips could be shared among two (or more) rithm 1 in the Methods section) which results in the num-
passengers in dense urban areas, providing a way to re- ber of vehicles, parking spaces needed to serve all trips
duce total distance traveled by the taxi fleet and costs and the total amount of travel. We also run a combined
for travelers. Furthermore, even without sharing rides, simulation, where we first create an optimal dispatching
the operations of the taxi fleet itself provides opportu- strategy resulting in trip chains using the methodology
nities for significant optimization and thus reductions in of vehicle shareability networks previously applied to the
fleet size [27, 38]. Research on recently launched car- problem of taxi dispatching [27] (see the Methods section
sharing systems shows that these contribute to reducing for more description), then use the same greedy heuris-
car travel with one shared car replacing between 10 and tic to assign trip chains and parking spots to vehicles.
20 private vehicles, but the problem of rebalancing the Finally, we perform the same estimations including the
fleet poses significant challenges to operators if one-way potential for ride-sharing. To achieve this we first match
trips are allowed [28, 29, 30]. trips that can be potentially shared using the trip share-
In this paper we aim to estimate a theoretical mini- ability network method previously used for taxi ride shar-
mum on the fleet size, total travel and parking needs of ing [24] and then run Algorithm 1 either alone or again
an AMOD system serving all mobility demand of trips combining with first calculating an optimal dispatching
currently taken in private vehicles in Singapore. This is strategy obtained from vehicle shareability networks.
in contrast to most previous work, which addressed the We apply this estimation to a dataset of trips made
operation of AMOD services under various assumptions in private vehicles by SimMobility, a complex platform
on demand and operational strategies [7, 13, 8, 31, 15]; for generating and simulating urban mobility realistically,
our main interest is providing an estimate of the proper- based on a thorough process of calibration and verifica-
ties of a fleet serving all current trips as in contrast to the tion [32]. Our dataset focuses on Singapore which is cur-
operational characteristics of a system with a presumed rently the main target of SimMobility. The data includes
fleet size. This way we expect to gain results which show 1.44 million trips made in private cars by 676 thousand
the potential of transforming mobility with AMOD ser- individuals over the course of one day in the simulation.
vices. In this goal, our work is most similar to that of This number is realistic for Singapore, a city-state of
Spieser et al. [14], but our approach also results in an ide- about 5 million people with one of the lowest number
alized dispatching strategy which satisfies all trips with- of private vehicles per capita in the developed world, but
out delay, while the estimate presented in [14] is an abso- still suffering from the effects of congestion in peak peri-
lute minimum that does not take into account operational ods and dedicating significant resources and space to road
characteristics, resulting in needing a much larger fleet to infrastructure. Beside trip data, SimMobility provides
provide adequate service to most passengers. Our focus us with a database of buildings in Singapore [37, 36].
on parking demand is most similar to the aims of the pre- We combine this database with official minimum park-
vious study by Zhang and Guhathakurta [15]; the main ing requirements [40] and estimates from the trip data to
difference again is that instead of running the simulation calculate a conservative estimate of the current number
based on a presumed fleet size and parking availability, of parking spaces in Singapore. This process results in
we aim to calculate the minimum numbers based on our an estimate of 1,369,576 parking spaces, or 2.02 parking
constraints. Our methodology extends on our previous spaces per person; we note that the real number is poten-
work focusing on a simplified model of commuting [16] tially even higher as this estimate only includes minimal
and methods employed by Santi et al. [24, 27] with re- requirements.
gards to ride-sharing and taxi fleet size estimation, but
now we focus on general trips for the whole population The main result of this process is an estimate of the
that are based on an extensive simulation of urban mo- minimum number of vehicles, parking spaces and travel
bility in Singapore [32]. distance required to serve the set of trips in our dataset.
Note that contrary to most previous work, our estimates
require that all trips in the original dataset are served
2 Results without delays. Our aim is establishing a limit on the
potential operational characteristics on an AMOD ser-
We estimate the minimum fleet size, parking require- vice. Nevertheless, we note that the main part of the
ments and total travel distance to optimally serve private process is the greedy heuristic estimation done by Al-
vehicle trips made in Singapore with an AMOD system. gorithm 1, which should be possible to reasonably ap-
As our input, we use trips generated by SimMobility, a proximate in real operations as it does not rely on previ-
comprehensive simulator for urban mobility which incor- ous knowledge of trip requests. To establish a potential
porates a detailed model of people’s movements in Sin- tradeoff between generating more traffic and requiring
gapore [32]. We use trips made in private vehicles and smaller fleet sizes and less parking, we repeat the simula-
our requirement is to serve all trips successfully without tion with varying the main parameter, the distance AVs
delay. The main tuneable parameter in the simulation are allowed to travel between the start or end location of
is the distance AVs are allowed to travel without a pas- a trip and their parking. We show the result of this in the
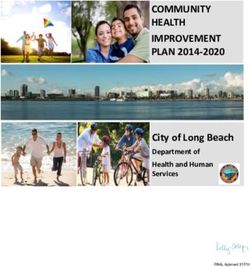
senger (e.g. between consecutive trips). Each value of top row of Figure 1, i.e. the relative change in traffic as
this parameter results in a different solution for fleet size, a function of the corresponding number of vehicles and
2
0.3 0.3
optimized dispatching (original) optimized dispatching (original)
optimized dispatching (weighted) optimized dispatching (weighted)
change in total distance traveled
change in total distance traveled
0.25 greedy heuristic 0.25 greedy heuristic
0.2 0.2
0.15 0.15
0.1 0.1
0.05 0.05
0 0
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
cars per person parking per person
-0.2 -0.2
optimized dispatching (original) optimized dispatching (original)
-0.22 optimized dispatching (weighted) -0.22 optimized dispatching (weighted)
change in total distance traveled
change in total distance traveled
greedy heuristic greedy heuristic
-0.24 -0.24
-0.26 -0.26
-0.28 -0.28
-0.3 -0.3
-0.32 -0.32
-0.34 -0.34
-0.36 -0.36
0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
cars per person parking per person
Figure 1: Main results: number of vehicles and parking per person and relative increase traveled for different modes
of estimation. Top row: using original trips; bottom row: considering ride-sharing, after pairing 97.2% of all trips.
Note that the per person values only consider people who currently make trips in their own vehicles; baseline numbers
are one car and 2-3 parking spaces per person.
3parking required per person. Here, each point represents further optimized if more sophisticated rebalancing algo-
one realization of the simulation with different values of rithms were used for fleet management, which is outside
the main parameters. Here, the relative change in traf- the scope of the current work.
fic refers to change in the total distance traveled by the A potential way to offset extra travel requirements of
fleet of AMODs compared to the total distance of the the SAV fleet and further increase efficiency would be
individual trips made by private cars today. Since the to incorporate ride-sharing into the AMOD system. We
potential to reduce parking mainly comes from the fact repeat all analysis with assuming willingness to use ride-
that AVs do not need to park at the exact destinations sharing as long as the resulting delay is not more than 5
of the trips, an AMOD scenario will result in more total minutes. In accordacne with previous work that was done
distance traveled. on taxi data [24, 25], we find that 97.2% of all trips are
Our main results indicate that we can easily achieve shareable. Using the resulting combined trips, we repeat
a fleet size of between 0.13 and 0.44 vehicles per person, the previous analysis and find further significant gains,
with between 0.26 and 0.85 parking spaces per person. displayed in the bottom row of Figure 1. Results for
Note that in this estimate, we are only considering the fleet size are between 0.08 and 0.24 vehicles per person,
people who currently use private vehicles, thus our base- while parking needs are between 0.17 and 0.47 per person;
line case for today’s scenario is one vehicle per person and these present a 76% to 92% reduction in the number of
2.02 parking spaces per person. For our simulated popu- vehicles and a 77.5% to 92% reduction in parking needs.
lation of 676 thousand individuals, these mean absolute Furthermore, we find significant reductions in traffic in
numbers for a SAV fleet size of between 89 thousand and all cases: total distance traveled by the SAV fleet is be-
296 thousand and between 210 thousand and 575 thou- tween 20% and 35% less than the distance traveled by
sand for parking spaces required. This way, our results private cars. We note that estimating the willingness to
suggest a 56% to 87% reduction in the number of vehicles share rides among passengers is difficult to do, especially
and a 58% to 85% reduction in parking. We note that for our target population of private car users, so a more
these come at a potentially significant increase in total realistic estimate would include only a limited subset of
traffic (as measured by the total distance traveled by the trips shared, with expected results in between the ones
SAV fleet compared to the total distance of trips), up to we find for the two extremes.
20%–30%. Still, already significant reductions are possi-
ble with moderate increases in traffic: with 2.5% extra
travel distance, we gain a 64% reduction in both the to-
3 Methods
tal number of vehicles and parking needs, while an 5% Our estimates are based on three components: Algo-
extra travel distance corresponds to approximately 70% rithm 1 which performs a greedy heuristic estimate on
reduction. An often proposed, but still debated claim the fleet size, parking need and total extra travel given
is that we can expect the adoption of self-driving to in- a set of trips or trip chains [16]; vehicle shareability net-
crease the efficiency of urban traffic significantly due to works [27] which provide an efficient method to calculate
better reaction times, sensing and communication abil- an optimal dispatching strategy to a set of trips, combin-
ities of vehicles allowing them to move more efficiently ing them to trip chain before running Algorithm 1; and
and closer together [10, 33]. This way, concerns about trip shareability network [24] which identify opportunities
extra congestion would be mitigated; we note that some for ride-sharing and outputs these combined trips to be
of these benefits will only be possible to realize with high further processed either by Algorithm 1 or with vehicle
penetration ratios of AVs, thus short-term impacts can shareability networks.
be varied based on the interplay of the many complex
factors involved.
3.1 Heuristic estimate
Beside calculating city-wide numbers for parking and
fleet size, our results can be used to assess the spatial Given a set of trips, Algorithm 1 calculates the minimal
distribution of parking demand for the AMOD fleet and number of vehicles and parking spaces needed to serve
compare it to the current distribution of parking in the them. The main parameter is rmax , the maximum dis-
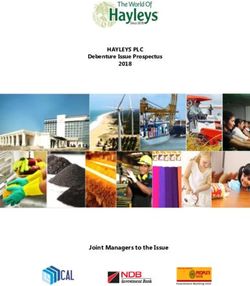
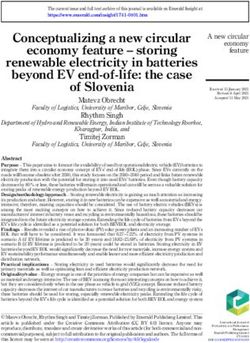
city. We display these distributions in Fig. 2 and also tance a vehicle is allowed to travel without a passenger
their difference (i.e. the amount of parking that becomes (before the start or after the end of a trip). Algorithm 1
surplus in our simulation) in Fig. 3. In both the current works by starting with an initially empty list of park-
and the proposed AMOD scenario, there is a significant ing spaces and vehicles, processing trips in time order
concentration of parking in the central area; this can be and adding further parking and vehicles when needed.
easily explained by the imbalance created by commuters This means that at the start of each trip, we search for
coming there during working hours. In accordance with available vehicles in an rmax radius (in the LC list of
this, potential savings in this area are also modest. Out- vehicles); if any vehicle is found, the closest one is as-
side the CBD however, we see large differences among signed to the trip and its location is added to the list of
the two distributions, in accordance with the overall high available parking spaces to be used later(LP ). If none is
gains. One notable exception is the recently developed found, a new vehicle and a corresponding new parking
Punggol district which is predominantly residential and spot is added to the system at the trip’s start location
is further from job locations than other typical residential (i.e. the newly added vehicle is assumed to have been
locations. This results in less optimization opportunities parked there previously; the new parking spot is again
as we limit the distance AVs can travel to reach a pas- added to LP to be used later). Similarly, at the end of
senger or parking. We note that both cases could be each trip, we search for available parking in an rmax ra-
4dius (in the LP list of empty parking spaces). If at least
one is found, the closest one is selected and the now free
vehicle is parked there, adding it to the list of available
vehicles to be potentially used for an upcoming trip (LC ).
If none is found, a new parking spot is added at the end
location of the trip and the vehicle is parked there (and
again it is added to LC ).
Note that the number of vehicles is increased each time
Algorithm 1 Main algorithm to calculate fleet size and
no available vehicle has been found at the start of the trip.
parking demand for shared self-driving vehicles.
The number of parking spaces is increased each time no
T = { list of trips or trip chains } vehicle has been found at the start of a trip and each time
rmax = maximum distance that self-driving no available parking has been found at the end of a trip.
cars are allowed to travel empty Since we start the calculations with no vehicles or parking
NP = 0 parking spaces required available, this procedure results in a minimal number of
NC = 0 number of cars required vehicles and parking spaces subject to the constraint that
Dtot = 0 extra travel distance vehicles need to be parked at most rmax distance from
LP = { empty list for free parking spaces } the start and end of any trip they make. This algorithm
LC = { empty list for available cars } can be considered a greedy heuristic in the sense that
E = { empty event list } it always selects the closest available vehicle or parking
for all t ∈ T do space for a trip without performing any global optimiza-
separate t to start and end “events” tion. This way, its runtime complexity is linear in the
add these to E number of trips and only slightly affected by the average
end for density of free vehicles and parking if an efficient spatial
process all events in E in time order: indexing solution (e.g. an R-tree) is used to keep track of
for all e ∈ E do these.
if e is the start of a trip then Beside calculating the number of vehicles and parking
find c ∈ LC s.t. dist(e, c) < rmax spaces required, we can also keep track of the extra travel
if found then required, i.e. the travel distances between the parking
remove c from LC locations and the start or end of trips. This extra travel
add c’s location to LP is in comparison to trips made in private vehicles where
add travel distance between c we assume that parking is available at the start and end
and e to Dtot of trips. As this methodology does not try to perform
else a global optimization, the results for fleet size, parking
assume there is a free car at e and extra travel will generally not be minimal, as a more
increase both NP and NC by one optimal dispathcing strategy could exist.
add e’s location to LP
Furthermore, using this methodology, it is easy to cal-
end if
culate the spatial distribution of parking spaces in the
else e is the end of a trip
result. We display these in an example case in Fig. 2.
find p ∈ LP s.t. dist(e, p) < rmax
if found then
remove p from LP 3.2 Vehicle shareability networks
add travel distance between e
and p to Dtot Shareability networks [24, 27] provide a computationally
add p’s location to LC efficient way to calculate an optimal dispatching strategy
else for a given list of trips, resulting in minimum fleet size
assume there is a more parking or minimum total connection distances between trips.
increase NP by one In this approach, a graph is constructed from the trips
add e’s location to LC where each trip is a node, and two trips are connected
end if by a (directed) edge if the start of the later trip can be
end if reached from the end of the earlier one. This way, each
end for edge represents a trip pair that can be served consecu-
Result: NP total number of parking spaces and NC tively by the same vehicle. Each trip can have several
total number of cars needed to satisfy mobility demand incoming and outgoing edges as there can be several dif-
and Dtot extra travel distance over the case of private ferent options of which connections to choose at the end
vehicles of a trip. Notably, trips separated by large time intervals
can always be connected by an edge; this way, the share-
ability network can be huge, i.e. scale with the square of
the number of trips. We limit the network size and com-
putational complexity by setting a maximum threshold
on the connection time as well. Since we expect a good
dispatching strategy to prefer short connections, reason-
able values of maximum connection time will only slightly
affect the solution.
5Figure 2: Spatial distribution of parking spaces. Left: simulation results using the greedy heuristic estimator with
rmax = 500 m. Total fleet size is 200 thousand vehicles and total parking need it 410 thousand, with 5% extra
traffic. Right: current distribution of parking spaces estimated from the SimMobility building and trip database.
The total number of parking spaces is 1.37 million.
Having constructed the vehicle shareability network, of connection distances is minimal, while the number of
we can find an optimal dispatching strategy by finding vehicles required is only slightly larger in practice.
a minimum path cover on it. While finding a minimum A further technical question when evaluating the total
path cover on a directed graph in general is NP-hard, number of parking requirement is of short term parking,
it can be solved in polynomial time for acyclic graphs i.e. between two consecutive trips in a chain. To properly
by converting the problem to finding a maximum match- handle these, we slightly modified Algorithm 1 to simul-
ing on a bipartite graph [34, 35]. In our case, the di- taneously process requests for short-term reservation of
rection of edges always respects time (edges always point parking spaces. This works similarly to finding parking
toward the trip that happens later), thus our shareability spaces in general, but the location of these short term
network will always be a directed acyclic graph and the parking can be anywhere between the end of the earlier
minimum path cover can be solved efficiently on it [27]. trip and the start of the later trip. Then such parking
This minimum path cover can then be used as a dispatch- spaces are assumed to be reserved for the duration be-
ing strategy where each path is interpreted as a chain of tween the two trips: they cannot be taken by any other
consecutive trips to be served by the same vehicle. Thus, vehicle, but are automatically added back to the list of
the number of vehicles needed is at most the number of available parking LP after the end of this time.
paths found. For limited maximum connection times, We note that a main drawback of the vehicle share-
some trip chains can be distinct in time (if separated by ability network approach is that all trips need to be
more than the minimum connection time). This can be known in advance. Regarding practical applicability,
the case if the demand for trips fluctuates during the day. Vazifeh et al. [27] estimate that a near-realtime ver-
In this case, vehicles can be assigned to trip chains using sion of the vehicle shareability network algorithm would
Algorithm 1 giving the combined minimum number of achieve similar performance with a fleet size between
vehicles and parking spaces required. 15% and 30% larger than the ideal one. In recent work,
Lowalekar et al. [38] perform an extensive analysis of the
While the result of this computation will be optimal dynamic assignment problem, which is closely related
in terms of fleet size, it can result in excessive extra to the concept of vehicle shareability networks. In our
travel as connection distance between consecutive trips case, near-realtime performance is instead evaluated by
in a chain is not part of the calculations. This prob- the heuristic estimator (Algorithm 1) that requires trips
lem is slightly mitigated by allowing only relatively short to be requested only in a small time in advance, which
connection times, thus limiting connection distances as corresponds to the time required for a vehicle to travel
well. Furthermore, we can set an explicit limit on con- rmax distance. Our results indicat good performance
nection distances as well. An other approach that we with only slight increases in fleet size when compared to
implemented is employing a weighted version of the max- the optimized solution based on shareability networks.
imum matching after converting the vehicle shareability
network to a bipartite graph. In practice, we associate
3.3 Trip shareability networks
each edge with a weight of Dmax − d, where Dmax is
a maximum allowed connection distance, and d is the Beside vehicle shareability networks, we use trip share-
connection distance on the current edge (omiting edges ability networks to identify the potential for ride-sharing
with d > Dmax ). Finding a solution that maximizes the (i.e. one vehicle serving the two overlapping passenger
sum of weights will result in trip chains where the sum trips at the same time) [24]. In this case, edges in the
6parking space per unit based on the minimum parking
requirements published by LTA [40], giving a total of
321,974 for this many units in the building database.
Beside housing, we have four use categories for build-
ings in the SimMobility database: office, retail, factory
and other. For these, we use minimum parking require-
ments that are most appropriate from the LTA minimum
parking requirements, displayed in Table 1 [40]. Apply-
ing these gives a total of 22,458 parking spaces related to
office use, 24,737 parking spaces related to retail, 77,577
parking spaces related to factory use and 78,829 parking
spaces for other uses. Furthermore, we have 25,740 park-
ing spaces managed by the URA, mostly on-street park-
ing and some parking lots. Adding these up, we have a
total of 1,185,162 parking spaces, giving a ratio of 1.753
parking spaces per person for our simulated population.
Since these numbers are based on the minimum park-
Figure 3: Spatial distribution of potential savings in ing requirements which are quite low, we expect that the
parking demand, i.e. the difference between the results actual number of parking is underestimated. This is espe-
displayed in Fig. 2. cially striking for office use, where a total of 22,458 park-
ing spaces seems unrealistically low. We note that the
minimum parking requirements in Singapore are quite
shareability network are drawn between trips that can be
low, in accordance with Singapore’s goal of becoming
shared, i.e. served by the same vehicle with an overlap-
“car-lite”. Specifically, for office use, Los Angeles county
ping segment. For the purpose of the current study, we
requires ten times more parking then Singapore does in
only deal with trip sharing between two passengers, thus
its CBD and five times more than Singapore does outside
our goal is to pair as many trips as possible. As a con-
the central area [17]. With this in mind, we expect that
straint we require that both trips should be served with
developers often provide more parking if there is an ex-
maximum 5 minutes of delay. Also, we weight the edges
pected demand. To better assess the actual availability
in the shareability network with the time of the shared
of parking, we run a simpler variant of our simulation,
portion of the trips. Again we calculate a weighted max-
where we assume human drivers who need to park their
imum matching, resulting in the maximum sharing of
car exactly at their destinations. This is very similar to
trips. As expected based on previous work [24, 25] and in
Algorithm 1 in our previous work [16], with rmax = 0.
accordance with the high density of trips in our dataset,
We note that trip origins and destinations were provided
almost all trips are shareable (97.2%). We note that this
as 4529 discrete locations, which we interpret as the lo-
does not automatically result in halving the number of
cations of potential parking lots. This way, people can
vehicles required as only part of the trips shared. The
share parking spaces even in this constrained version of
actual reductions are 36% in total travel distance, 31%
the simulation, again giving a lower estimate on actual
in total travel time with 67% of the time now spent in a
parking usage. The result of this procedure is an estimate
shared part of a trip and a 35% reduction in the maxi-
of 1,064,952 parking spots.
mum number of trips happening at the same time (which
is a minimum limit on the number of vehicles required).
To combine these results with the previous estimation,
we map the building locations to all possible trip start
3.4 Estimating current parking supply
locations in a 250 m radius around them, and distribute
We estimate the parking spaces currently available in Sin- the estimated parking in a way that minimizes the dis-
gapore by combining the database of buildings present in crepancy between the two results. After this, for each
SimMobility [37, 36] with related official sources, notably location, we take the larger value from the two estimates
the list of parking spaces managed by the Urban Rede- as our final estimate of parking. The main idea behind
velopment Authority (URA) [39], the official minimum this is to adjust estimates in locations where basing them
parking requirements published by the Land Transport only on minimum parking requirements gives unrealisti-
Authority (LTA) [40] and the aggregate number of park- cally low values, especially for offices in the CBD area.
ing spaces managed by the Housing Development Board On the contrary, in residential locations, we find that
(HDB) [41]. We further combine this data with results the actual demand for parking is already lower than the
for parking occupancy from the trip data itself. current supply. After these adjustments, we arrive at a
For housing constructed by the HDB, we distribute the number of 1, 369, 576 parking spots, or 2.02 per person
total number of parking reported officially evenly among considering our simulated population. We still consider
all such apartments in Singapore. The aggregate num- this as a lower bound on the real number of parking in
ber available from the government source [41] is 640,188, Singapore. We display the spatial distribution f parking
while the SimMobility database includes 1,188,649 HDB spaces in Fig. 2. This estimate then allows us to calcu-
apartments in total, giving on average 0.5386 parking late a spatially detailed comparison of potential savings;
spaces per unit. For private housing, we assume one we display such results in Fig. 3.
7Minimum parking required
within 400 m distance of a
use type in the CBD everywhere else
rapid transit station
residential 1 space per unit
office 1 space per 450 m2 1 space per 250 m2 1 space per 200 m2
retail 1 space per 400 m2 1 space per 200 m2 1 space per 150 m2
factory 1 space per 450 m2
other 1 space per 300 m2
Table 1: Minimum parking requirements used to estimate parking availability. These are based on the standards
published by LTA. The categories displayed here are the ones avaiable in our building database; actual categories
in the official standard are more diverse. Notable, the value used here for factories is a best estimate based on
different standards for different actual factory types distinguished by LTA. The value for other uses is also based on
a qualitative assessment of different requirements for different use types.
4 Discussion real willingness for ride-sharing, especially among people
who currently use private cars, where privacy and exclu-
sivity are among the main benefits. With the potential
Our results show that a drastically reduced fleet of SAVs
that an AMOD system can efficiently compete with pub-
could serve all private vehicle trips in Singapore, freeing
lic transportation and generate induced demand [6, 12],
up tremendous amount of space currently dedicated to
we believe that further work should focus on better un-
parking. We believe that due to this reduction in parking
derstanding the challenges in terms of traffic management
needs, SAVs can contribute to a significant transforma-
and congestion in different scenarios with respect to rates
tion of urban spaces with further densification possible
of adoption, pricing, public policy and regulatory envi-
in many scenarios. Perhaps the most important change
ronment.
could be the disappearance of surface parking lots in typ-
ical suburban settings. We expect that this will have
the important secondary effect of increasing walkability: References
since former parking lots provide prime location for fur-
ther development, typical distances can decrease, making [1] Daniel J. Fagnant and Kara Kockelman. Preparing a
walking alone or combined with public transit a more at- nation for autonomous vehicles: Opportunities, barriers
tractive option. In already denser areas like downtowns, and policy recommendations. Transportation Research
we expect less potential for new development, but the Part A: Policy and Practice, 77:167–181, 2015. ISSN
conversion of any above-ground parking garages will still 09658564. https://dx.doi.org/10.1016/j.tra.2015.
04.003.
present opportunities for densification, again having the
potential of more convenient access to amenities to lo- [2] Wolfgang Gruel and Joseph M. Stanford. Assessing the
cals. Furthermore, exploiting the potential to greatly Long-term Effects of Autonomous Vehicles: A Specula-
reduce on-street parking can foster the growth of effec- tive Approach. Transportation Research Procedia, 13:
tive usable public space, resulting in improvements for 18–29, 2016. ISSN 23521465. https://dx.doi.org/10.
local residents in terms of liveability and consequently 1016/j.trpro.2016.05.003.
for local businesses in terms of better customer engage- [3] Prateek Bansal and Kara M. Kockelman. Forecasting
ment. Re-use of current underground parking facilities is Americans’ long-term adoption of connected and au-
most questionable. Nevertheless, some of these should be tonomous vehicle technologies. Transportation Research
preserved for the use of the SAV fleet, while the surplus Part A: Policy and Practice, 95:49–63, 2017. ISSN
could be converted to commercial or logistics usage. We 09658564. https://dx.doi.org/10.1016/j.tra.2016.
expect that the availability of excess space, even if un- 10.013.
derground, will generate new business opportunities; we [4] Ricardo A. Daziano, Mauricio Sarrias, Benjamin Leard.
believe that given the potential for becoming obsolete, Are consumers willing to pay to let cars drive for them?
parking facilities should be designed with the potential Analyzing response to autonomous vehicles. Transporta-
to convert to different uses in mind. We note that our tion Research Part C: Emerging Technologies, 78:150–
research only outlines the possibility for much reduced 164, 2017. ISSN 0968090X. https://dx.doi.org/10.
parking demand; any changes will be gradual, thus hav- 1016/j.trc.2017.03.003.
ing a significant surplus of parking in city centers in the
[5] Rico Krueger, Taha H. Rashidi, John M. Rose. Prefer-
near future is still unlikely. ences for shared autonomous vehicles. Transportation
While the results for fleet size are promising and the Research Part C: Emerging Technologies, 69:343–355,
greatly reduced parking demand outlines the potential 2016. ISSN 0968090X. https://dx.doi.org/10.1016/
for significant urban transformations, the effects on traf- j.trc.2016.06.015.
fic congestion are much less clear. We have seen that the [6] Bryant Walker Smith. Managing Autonomous
most optimal dispatching strategies result in significant Transportation Demand. Santa Clara Law Re-
extra traffic (measured as total distance traveled). While view, 52(4):1401–1422, 2012. ISSN 02729490.
we have shown that this can be compensated by sharing http://digitalcommons.law.scu.edu/lawreview/
trips among pairs of passengers, it is hard to estimate the vol52/iss4/8/.
8[7] Daniel J. Fagnant, Kara M. Kockelman. The travel and [17] Mikhail Chester, Andrew Fraser, Juan Matute, Car-
environmental implications of shared autonomous vehi- olyn Flower, and Ram Pendyala. Parking Infras-
cles, using agent-based model scenarios. Transportation tructure: A Constraint on or Opportunity for Ur-
Research Part C: Emerging Technologies, 40:1–13, 2014. ban Redevelopment? A Study of Los Angeles County
ISSN 0968090X. https://dx.doi.org/10.1016/j.trc. Parking Supply and Growth. Journal of the Ameri-
2013.12.001. can Planning Association, 81(4):268–286, 2015. ISSN
0194-4363. http://www.tandfonline.com/doi/full/
[8] Lawrence D. Burns, William C. Jordan, Bon- 10.1080/01944363.2015.1092879.
nie a. Scarborough. Transforming Personal Mo-
bility. Technical report, The Earth Institute, [18] Michael Szell. Crowdsourced Quantification and Vi-
Columbia University, 2013. http://wordpress. sualization of Urban Mobility Space Inequality. Ur-
ei.columbia.edu/mobility/files/2012/12/ ban Planning, 3(1):2183–7635, 2018. ISSN 2183-7635.
Transforming-Personal-Mobility-Aug-10-2012.pdf. https://dx.doi.org/10.17645/up.v3i1.1209.
[19] Nourinejad M, Bahrami S, Roorda M J. Designing park-
[9] Chris Brownell, Alain Kornhauser. A Driverless Alter-
ing facilities for autonomous vehicles. Transportation
native Fleet Size and Cost Requirements for a Statewide
Research Part B, 109, 110–127. https://doi.org/10.
Autonomous Taxi Network in New Jersey. Transporta-
1016/j.trb.2017.12.017
tion Research Record, 2416:73–81, 2014. https://dx.
doi.org/10.3141/2416-09. [20] Donald C Shoup. The high cost of free parking. Planners
Press Chicago, 2005. ISBN 1884829988.
[10] Vincent A.C. van den Berg, Erik T. Verhoef. Au-
tonomous cars and dynamic bottleneck congestion: The [21] Donald C. Shoup. Cruising for parking. Transport
effects on capacity, value of time and preference hetero- Policy, 13(6):479–486, 2006. ISSN 0967070X. https:
geneity. Transportation Research Part B: Methodologi- //dx.doi.org/10.1016/j.tranpol.2006.05.005.
cal, 94:43–60, 2016. ISSN 01912615. https://dx.doi.
org/10.1016/j.trb.2016.08.018. [22] Rachel Weinberger. Death by a thousand curb-cuts: Ev-
idence on the effect of minimum parking requirements
[11] Shen Y, Zhang H, Zhao J (2018). Integrating shared on the choice to drive. Transport Policy, 20:93–102,
autonomous vehicle in public transportation system: A 2012. ISSN 0967070X. https://dx.doi.org/10.1016/
supply-side simulation of the first-mile service in Singa- j.tranpol.2011.08.002.
pore. Transportation Research A, 113, 125–136. https:
[23] Christopher T. McCahill, Norman Garrick, Carol
//dx.doi.org/10.1016/j.tra.2018.04.004
Atkinson-Palombo, and Adam Polinski. Effects of Park-
ing Provision on Automobile Use in Cities. Trans-
[12] Corey D. Harper, Chris T. Hendrickson, Sonia Man-
portation Research Record: Journal of the Trans-
gones, Constantine Samaras. Estimating potential in-
portation Research Board, 2543:159–165, 2016. ISSN
creases in travel with autonomous vehicles for the non-
0361-1981. http://trrjournalonline.trb.org/doi/
driving, elderly and people with travel-restrictive medi-
10.3141/2543-19.
cal conditions. Transportation Research Part C: Emerg-
ing Technologies, 72:1–9, 2016. ISSN 0968090X. https: [24] Paolo Santi, Giovanni Resta, Michael Szell, Stanislav
//dx.doi.org/10.1016/j.trc.2016.09.003. Sobolevsky, Steven H Strogatz, and Carlo Ratti. Quan-
tifying the benefits of vehicle pooling with shareabil-
[13] Daniel J. Fagnant, Kara M. Kockelman, Prateek Bansal. ity networks. PNAS, 111(37):13290–13294, 2014. ISSN
Operations of Shared Autonomous Vehicle Fleet for 0027-8424, 1091-6490. https://dx.doi.org/10.1073/
Austin, Texas, Market. Transportation Research Record: pnas.1403657111.
Journal of the Transportation Research Board, 2536:98–
106, 2015. ISSN 0361-1981. https://dx.doi.org/10. [25] R. Tachet, O. Sagarra, P. Santi, G. Resta, M. Szell, S. H.
3141/2536-12. Strogatz, and C. Ratti. Scaling law of urban ride shar-
ing. Scientific Reports, 7:42868, 2017. ISSN 20452322.
[14] Kevin Spieser, Kyle Treleaven, Rick Zhang, Emilio https://dx.doi.org/10.1038/srep42868.
Frazzoli, Daniel Morton, Marco Pavone. Toward a
Systematic Approach to the Design and Evaluation [26] Javier Alonso-Mora, Samitha Samaranayake, Alex Wal-
of Automated Mobility-on-Demand Systems: A Case lar, Emilio Frazzoli, and Daniela Rus. On-demand high-
Study in Singapore. In Road Vehicle Automation, capacity ride-sharing via dynamic trip-vehicle assign-
pages 229–245. 2014. https://dx.doi.org/10.1007/ ment. Proceedings of the National Academy of Sci-
978-3-319-05990-7_20. ences, 114(3):462–467, 2017. ISSN 0027-8424. https:
//dx.doi.org/10.1073/pnas.1611675114.
[15] Wenwen Zhang and Subhrajit Guhathakurta. Parking
[27] Paolo Santi, Mohammad M Vazifeh, Giovanni Resta,
Spaces in the Age of Shared Autonomous Vehicles: How
Steven H Strogatz, and Carlo Ratti. Minimum fleet
Much Parking Will We Need and Where? Transporta-
problem: estimating the smallest number of vehicles to
tion Research Board 96th Annual Meeting, pages 17–
serve a city’s transportation demand. to appear, 2018.
05399, 2017. https://trid.trb.org/view.aspx?id=
1439127. [28] Diana Jorge and Gonçalo Correia. Carsharing systems
demand estimation and defined operations: A literature
[16] Dániel Kondor, Hongmou Zhang, Remi Tachet, Paolo review. European Journal of Transport and Infrastruc-
Santi, and Carlo Ratti. Estimating savings in parking ture Research, 13(3):201–220, 2013. ISSN 15677141.
demand using shared vehicles for home-work commut-
ing. arXiv preprint, arXiv:1710.04983, 2017. https: [29] Elliot Martin, Susan Shaheen, and Jeffrey Lidicker.
//arxiv.org/abs/1710.04983. Impact of Carsharing on Household Vehicle Holdings.
9Transportation Research Record: Journal of the Trans- [41] https://data.gov.sg/dataset/
portation Research Board, 2143:150–158, 2010. ISSN hdb-properties-facilities-under-management?
0361-1981. https://dx.doi.org/10.3141/2143-19. resource_id=78c18b2b-b4cb-47d7-a953-612b3a2800ce
[30] Dimitris Papanikolaou. A new system dynamics frame-
work for modeling behavior of vehicle sharing systems.
Proceedings of the 2011 Symposium on Simulation for
Architecture and Urban Design, Society for Computer
Simulation International, Boston, Massachusetts, pages
126–133, 2011. http://dl.acm.org/citation.cfm?id=
2048552.
[31] Carlos Lima Azevedo, Katarzyna Marczuk, Sebastián
Raveau, Harold Soh, Muhammad Adnan, Kakali Basak,
Harish Loganathan, Neeraj Deshmunkh, Der-Horng Lee,
Emilio Frazzoli, and Moshe Ben-Akiva. Microsimulation
of Demand and Supply of Autonomous Mobility On De-
mand. Transportation Research Record: Journal of the
Transportation Research Board, 2564:21–30, 2016. ISSN
0361-1981. https://dx.doi.org/10.3141/2564-03.
[32] Muhammad Adnan, Francisco C Pereira, Miguel Car-
los Lima Azevedo, Kakali Basak, Milan Lovric, Se-
bastian Raveau, Yi Zhu, Joseph Ferreira, Christopher
Zegras, and Moshe E Ben-Akiva. SimMobility: A
Multi-Scale Integrated Agent-based Simulation Plat-
form. In 95th Annual Meeting of the Transportation
Research Board Forthcoming in Transportation Research
Record, 2016. http://web.mit.edu/cami/Public/CLA_
SimMobility_Framework_TRB_2016.pdf.
[33] Remi Tachet, Paolo Santi, Stanislav Sobolevsky, Luis Ig-
nacio Reyes-Castro, Emilio Frazzoli, Dirk Helbing, and
Carlo Ratti. Revisiting street intersections using slot-
based systems. PLOS ONE, 11(3):1–9, 03 2016. https:
//dx.doi.org/10.1371/journal.pone.0149607.
5
[34] John E Hopcroft and Richard M Karp. An n 2 algo-
rithm for maximum matching in bipartite graphs. SIAM
Journal on Computing, 2(4):225–231, 1973. https:
//dx.doi.org/10.1137/0202019.
[35] F T Boesch and J F Gimpel. Covering Points of a Di-
graph with Point-Disjoint Paths and Its Application to
Code Optimization. Journal of the ACM, 24(2):192–198,
1977. ISSN 00045411. https://dx.doi.org/10.1145/
322003.322005. http://portal.acm.org/citation.
cfm?doid=322003.322005.
[36] D T Le, G Cernicchiaro, C Zegras, J Ferreira. Construct-
ing a Synthetic Population of Establishments for the
Simmobility Microsimulation Platform. Transportation
Research Procedia, 19, 81–93, 2016. https://dx.doi.
org/10.1016/j.trpro.2016.12.070
[37] Y Zhu, J Ferreira. Data Integration to Create Large-
Scale Spatially Detailed Synthetic Populations. In Plan-
ning Support Systems and Smart Cities, Springer, 2015.
https://dx.doi.org/10.1007/978-3-319-18368-8_7
[38] Lowalekar M, Varakantham P, Jaillet P (2018). On-
line spatio-temporal matching in stochastic and dynamic
domains. Artificial Intelligence, 261, 71–112. https:
//dx.doi.org/10.1016/j.artint.2018.04.005
[39] https://data.gov.sg/dataset/
ura-parking-lot?resource_id=
6baa1ff2-a647-41a0-bb7e-17218964e91e
[40] https://www.lta.gov.sg/content/dam/ltaweb/corp/
Industry/files/VPCOP2011.pdf
10You can also read