Evaluation of a Pedestrian Walking Status Awareness Algorithm for a Pedestrian Dead Reckoning
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Evaluation of a Pedestrian Walking Status
Awareness Algorithm for a Pedestrian Dead
Reckoning
M. S. Lee, S. H. Shin, C. G. Park, Seoul National University
BIOGRAPHIES ABSTRACT
Min Su Lee (email: mandu64@snu.ac.kr) is a M.S. In this paper we present a PDR (Pedestrian Dead
student in the School of Mechanical and Aerospace Reckoning) system with a walking status awareness
Engineering of Seoul National University, Seoul, Korea. algorithm. PDR is a device which provides position
He received his B.S. degrees in School of Mechanical & information of the pedestrian. In general, the step length
Aerospace Engineering, Seoul National University in is estimated using a linear combination of the walking
2008. His research interests include the Pedestrian Dead frequency and the acceleration variance for the mobile
Reckoning, Inertial Navigation Systems. phone. It means that the step length estimation accuracy is
affected by coefficients of the walking frequency and the
Seung Hyuck Shin (email: mad2407@snu.ac.kr) is a Ph.D acceleration variance which are called step length
student in the School of Mechanical and Aerospace estimation parameters. Developed PDR is assumed that it
Engineering of Seoul National University, Seoul, South is embedded in the mobile phone. Thus, we used a single
Korea. He received his B.S, degrees in Information and sensor module which is attached to a waist and a pants
Control Engineering from Kwangwoon University in pocket of a pedestrian. A single sensor module consists of
2004. And he received his M.S. degree in the School of three axis accelerometers, a micro processor and
Mechanical and Aerospace Engineering of Seoul National Bluetooth. The step length estimation parameters can be
University in 2006. His current research interests include different from each phone location and pedestrian`s step
the Pedestrian Dead Reckoning, Context Awareness, motion such as walk or run. It means that different
Inertial Navigation Systems, PDR/WLAN Integration parameters can degrade the accuracy of the step length
algorithm and MEMS-based IMU Applications. estimation. Step length estimation result can be improved
when appropriate parameters which are determined by
Chan Gook Park (email: chanpark@snu.ac.kr, website: pedestrian walking status awareness algorithm. In this
http://nesl.snu.ac.kr) received the B.S., M.S., and Ph.D. paper, the pedestrian walking status awareness algorithm
degrees in control and instrumentation engineering from for PDR is proposed.
the Seoul National University, Seoul, Korea, in 1985,
1987, and 1993, respectively. He worked with Prof. Jason INTRODUCTION
L. Speyer about peak seeking control for formation flight
at University of California, Los Angeles (UCLA) as a The portable navigation system has been developing
postdoctoral fellow in 1998. From 1994 to 2003 he was based on the E911 (Enhanced 911) implementation
with the Kwangwoon University, Seoul, Korea, as an requires that were reported by the Federal
Associate Professor. In 2003, he joined the faculty of the Communication Commission (FCC) in 1996. This set out
School of Mechanical and Aerospace Engineering at the explicitly defined requirements that position information
Seoul National University, Korea, where he is currently a for emergency calls made from mobile phones must be
Professor. In 2009, He was a visiting scholar with the transferred to the 911 public safety answering point
Department of Aerospace Engineering at Georgia Institute (PSAP) with an accuracy of 67% CEP 50m and 95% CEP
of Technology, Atlanta, GA. He served as a chair of IEEE 150m. The portable navigation system has been
AES Korea Chapter until 2009. His current research implemented using GPS, CDMAs pilot signals,
topics include advanced filtering techniques, Inertial AGPS/TDOA, etc. However, these techniques have
Navigation System (INS), GPS/INS integration, MEMS- several limits such as restrictions on the use of GPS
based Pedestrian Dead Reckoning (PDR), and FDIR signals, many error sources in the CDMA signals, etc.
techniques for satellite systems. Another research area for the navigation system is MEMS
based pedestrian navigation system. In recent years,
MEMS technology has allowed production of inexpensive
lightweight and small-size inertial sensors with low power
consumption. These are all desirable properties for
2280
23rd International Technical Meeting of the Satellite Division of
The Institute of Navigation, Portland, OR, September 21-24, 2010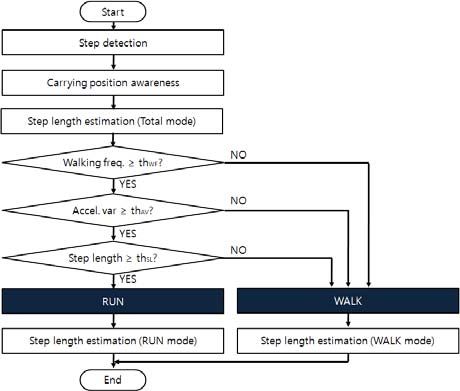
components of a portable navigation system. The quality
of the MEMS inertial sensors is, however, conspicuously
low. Thus, a noble algorithm is required to enhance the
performance of the portable navigation system
implemented using the MEMS inertial sensors. The
technical limit and necessity led the development of
algorithms for PDR (Pedestrian Dead Reckoning). When
the initial position is known from like GPS, PDR system
can be available. PDR is based on the step information,
which can be obtained using accelerometers. When the
calculated using magnetometer or gyro. When we know
the step length and the heading, we can get the position of
the pedestrian. And if the digital map data is available, we
can provide more accurate navigation information using
Map matching algorithm.
One of the key difficulties in PDR is to estimate the
step length according to the status of walk or run. Various (a) Walking Frequency and Step Length
systems and algorithms for PDR have been introduced.
Most of the proposed methods utilize inertial sensors and
step detection algorithms. Jirwimut modeled the step
length error as a first-order Gauss-Markov process, and
the step length is estimated using a Kalman filter and GPS
[1]. The step length is modeled as a linear combination of
a constant and step frequency [2], as that of a constant,
step frequency and variation of the accelerometer [3,4], or
as that of a step frequency, variance of the measured
acceleration magnitude and the vertical velocity [5].
Sagawa and Cho calculated the step length by integrating
the accelerometer and compensating for the bias using the
information that the velocity of the foot is zero when the
walking phase is a stance phase [6,7]. Gabaglio modeled
walking speed as a linear combination of a constant and a
function of acceleration variability [8]. Aminian proposed (b) Acceleration Variance and Step Length
a neural network to estimate the inclination and the Figure 1. Signal pattern of walking motion
walking speed [9].
In general, the step length is estimated using a linear SYSTEM DESCRIPTION
combination of the walking frequency and the
acceleration variance for the mobile phone. The step So far, several types of PDR are proposed on the papers
length estimation accuracy, however, is affected by and patents. The system can be attached on the pedestrian.
coefficients of the walking frequency and the acceleration The proposed system consists of 3-axis accelerometer, 3-
variance which are called step length estimation axis gyros, 3-axis magnetometers and a bluetooth module.
parameters. These parameters are different from each The components of the system are small-sized and low-
carrying position, waist or pants pocket and different from cost. Furthermore, we assumed that the module is
each walking status, walk or run. It means that different attached at pedestrian`s waist and pants pocket which are
parameters can decrease the accuracy of the step length examples of mobile phone carrying position.
estimation. Thus, a pedestrian walking status awareness
algorithm is needed that classifying pedestrian walk or PEDESTRIAN NAVIAGITION ALGORITHM
run, then setting different parameters at each walking
status. In our previous research, Shin & Park proposed Step length estimation
phone location awareness algorithm using gyro output
[10]. Thus, we assumed that we already know where the Step length is utilized in order to calculate the walking
module is carried at. We can classify each step motion at distance in a PNS system. If the step length is constant,
each carrying position. the walking distance can be calculated with accuracy.
In this paper, pedestrian walking status awareness However, the step length varies continuously according to
algorithm is proposed using three different thresholds, the walking speed. Unless a varied step length is
walking frequency, accelerometer variance and step considered, the results of the PNS may have large errors.
length. According to the result of our investigation, the stride is
influenced by walking frequency and a variance of the
accelerometer signals during one step. It is confirmed that
2281
23rd International Technical Meeting of the Satellite Division of
The Institute of Navigation, Portland, OR, September 21-24, 2010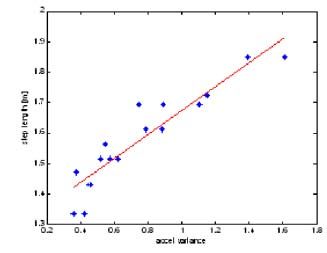
the stride is proportional to the walking frequency and the Walking Freq. vs. Step length
2
acceleration variance. Fig. 1 shows that the relations slow walk
normal walk
between step length and walking pattern (walking 1.5 fast walk
frequency and acceleration variance). In a walking slow run
fast run
motion, the stride is determined using a linear 1
combination of walking frequency and variance of the
0.5
accelerometer in order to estimate the step length in real 1.6 1.8 2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6
time. Eq. (1) shows step length and Eq. (2) show walking Accel var. vs. Step length
2
distance. slow walk
normal walk
1.5
Step Length = α ⋅ f + β ⋅ v + γ
fast walk
(1) slow run
n fast run
∑ (α ⋅ f
1
Walking distance = i + β ⋅ vi + γ ) (2)
i =1
0.5
0 5 10 15 20 25 30
where,
α , β = weights of walking parameters
γ = constant
f i = walking frequency of the i-th step
(a) Waist
Walking Freq. vs. Step length
vi = acceleration variance of the i-th step 2
slow walk
normal walk
1.5
The linear combination is pre-learned during a pre- fast walk
slow run
calibration stage. When the GPS signal is reliable, the 1 fast run
stride of a pedestrian can be calibrated using the position
information from the GPS. 0.5
1.8 2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6
Accel var. vs. Step length
Ground test 2
slow walk
normal walk
However above method is only accurate for walking 1.5 fast walk
slow run
status. To make walking status awareness algorithm, we fast run
1
need to aware step motion and set different step length
parameters at each status. Walking experiments was 0.5
2 4 6 8 10 12 14 16
conducted to verify relationship between step length,
walking frequency and acceleration variance at walking
(b) Pants pocket
and running. Pedestrian performs 50m straight line with Figure 2. Experiment results of walk and run motion at
different walking status, slow walk, normal walk, fast different carrying position
walk, slow run and fast run at two module carrying
position (waist, pants pocket). Fig.2 shows relationship
between walking frequency and step length (up) and
between acceleration variance and step length (down) at
each carrying position. When pedestrian is run, linearity
of Eq. 1 is broken. We can found some different slop
when speed of run is increasing. Therefore, we need to
make a walking status awareness algorithm which
distinguish walk and run motion to get more accurate step
length estimation result.
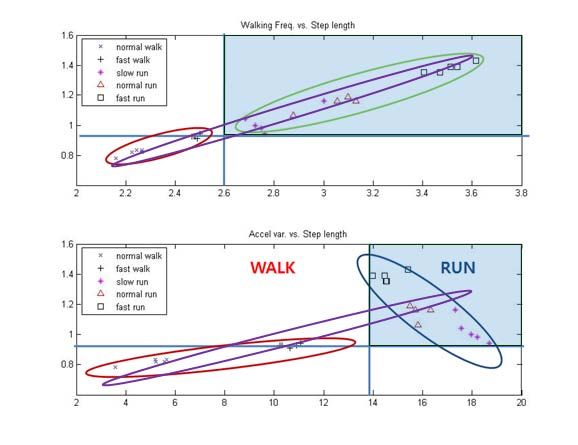
WALKING STATUS AWARENESS ALGORIHM
In this paper, the walking status awareness algorithm is
designed using 3 different threshold values. These
threshold values are walking frequency, acceleration
variance and step length. At this moment, step length is Figuer 3. Concept of walking status awareness algorithm
calculated from an arbitrary step length estimation
parameter which does not care about walking status (we the thresholds, and then present step motion can be
called it total mode). Fig. 3`s purple line is example of defined as run motion.
total mode parameter. At Fig. 3, 3 blue straight lines are Furthermore, from this result we can make 3 different
threshold values at each parameter. When one of variables parameter sets. First one is total mode, ignoring walking
are over the threshold, then there is probability that status and making linear parameter from all status data.
2282
23rd International Technical Meeting of the Satellite Division of
The Institute of Navigation, Portland, OR, September 21-24, 2010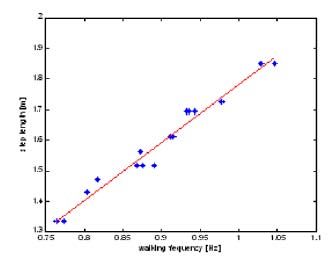
Data num = 1
40
30
Accel. [m/s 2], Attitude [deg.]
20
10
0
1 2 3 4 56 78 910111213
1415
16171819202212234
2256
2278
2390
33132343356
37
38
39
40414243444546474849
-10
-20
-30
-40
300 400 500 600 700 800 900 1000
Samples [Hz]
(a) Carrying position – Waist
Data num = 3
Figure 4. Flowchart of the walking status awareness
algorithm
30
This parameter is kind of general parameter and will be 20
Accel. [m/s 2], Attitude [deg.]
used for step length estimation before the walking status
10
algorithm process. Second is walking mode, makes linear
parameters from only walking motion data. Final mode is 0
running mode, like a walking mode, make linear 1 2 34 5 6 78 9101112131415161718192021
22223422562278239301
323334536
338
7394041424344454647484950
parameters from running data. And at each carrying -10
position, linear combination parameters are different. The
-20
algorithm uses walking parameters at walking motion and
uses running parameters at running motion. -30
Fig. 4 is flowchart for the walking status awareness
algorithm. When step is detected, then carrying position is 400 500 600 700 800 900 1000
Samples [Hz]
awarded by using carrying position awareness algorithm.
In this paper we assumed that carrying position is waist (b) Carrying position – Pants pocket
and pants pocket. And estimating step length by using Figure 4. Experiment results of walking status awareness
total mode step length estimation parameters at present algorithm
carrying position. Walking frequency, acceleration
variance and step length are compared with thresholds, Table 1. Accuracy of walking status awareness algorithm
and if all of variables are over the threshold then
classifying present step is run. Otherwise, present step is Carrying Position
Waist Pants
walk and estimate step length with walk mode step length Result
estimation parameter.
Error [%] 3.67 4.97
EXPERIMENT REUSLTS
Table 2. Accuracy of step length estimation with walking
Walking tests were conducted in order to verify the status awareness algorithm (APDR(PDR))
performance of the proposed algorithm. Step length
estimation parameters of phone location learning and Carrying Position
Waist Pants
walking motion learning are first done on the appropriate Result
trajectory. At this time, pedestrian walks along 50m 4.73 5.23
straight trajectory. At the middle of trajectory, pedestrian Error [%]
(18.21) (19.98)
runs few steps shortly and walks again with normal speed.
Fig. 4 shows results of experiment. Red bars show
awareness of run motion. In Fig. 4 (a), module carrying algorithm. As a result, the error of the proposed algorithm
position is waist and in Fig. 4 (b), module carrying is about 4.97% at the worst. Since there is severe
position is pants pocket. And there is little false detection movement of leg between left and right leg, accuracy of
during transition of walking motion. Especially, at the algorithm is decreased at pants pocket carrying position.
beginning or finish of running motion , that is hard to Table 2 shows improved accuracy of step length
classify the motion. estimation by using our proposed algorithm. In run
Table 1 shows accuracy of walking status awareness motion, accuracy of original step length estimation is too
bad that average of error is about to 20%. But when using
2283
23rd International Technical Meeting of the Satellite Division of
The Institute of Navigation, Portland, OR, September 21-24, 2010our algorithm, error is significantly decreased about 4 [9] K. Aminian, Ph. Robert, E. Jequier, Y. Schutz,
times. “Level, Downhill and Uphill Walking Identification
using Neural Networks,” Electronics Letters 19th
CONCLUSION August, 1993, Vol.29, No.17.
[10] Lee, S., and K. Mase, “Activity and Location
This research demonstrates the walking status awareness
Recognition using Wearable Sensors.” IEEE
algorithm for PDR. Considered walking statuses are walk
Pervasive Computing 24-32, 2002
and run. Also, carrying position of module is considered
such as waist and pants pocket. In order to develop the [11] Ravi, N. ; Dandekar, N. ; Mysore, P. ; Littman, M.
algorithm, three features are used such as walking L. “Activity Recognition from Accelerometer Data.”
frequency, acceleration variance and step length. And set Proceedings of the National Conference on Artificial
3 different threshold values at each features. In order to Intelligence, v.20 no.3, 2005, pp.1541-1546
verify the performance of the proposed algorithm,
[12] Bao, L., Intille, S.S. “Activity recognition from user
walking tests are conducted. Result show that the
proposed algorithm can improve the accuracy of the annotated acceleration data.” Proceedings of the 2nd
walking distance estimation of the pedestrian. Walking International Conference on Pervasive computing, 1-
17
status awareness error is less than 5%.
[13] Lukowicz, P. ; Ward, J. A. ; Junker, H. ; Stager, M. ;
ACKNOWLEDGMENTS Troster, G. ; Atrash, A. ; Starner, T. “Recognizing
Workshop Activity Using Body Worn Microphones
We acknowledge that this work has been supported by and Accelerometers.” Lecture notes in computer
Samsung Electronics Co. Ltd. science, v.3001, 2004, pp.18-32
REFERENCES [14] S. H. Shin, C. G. Park, H. S. Hong, J. M. Lee,
“Adaptive Step Length Estimation for PNS using the
[1] R. Jirawimut, P. Ptasinski, V. Garaj, F. Cecelja, W. Awareness of the Sensor Location and the Walking
Balachandran, “A Method for Dead Reckoning Status of Pedestrians,” ION GNSS 2007, Fort Worth,
Parameter Correction in Pedestrian Navigation Texas September 25-28, 2007.
System,” Proceedings of the 18th IEEE
Instrumentation and Measurement Technology
Conference, 2001.
[2] R. W. Levi, T. Judd, “Dead Reckoning Navigational
System using Accelerometer to Measure Foot
Impacts,” United States Patent No. 5,583,776, 1996.
[3] Quentin Ladetto, “On foot navigation : continuous
step calibration using both complementary recursive
prediction and adaptive Kalman filtering,”
Proceedings of ION GPS 2000, pp.1735~1740.
[4] S. H. Shin, C. G. Park, H. S. Hong, J. M. Lee,
“MEMS-based Personal Navigator Equipped on the
User’s Body.” Proceedings of ION GNSS 2005.
[5] J. Kappi, J. Syrjarinne, J. Saarinen, “MEMS-IMU
Based Pedestrian Navigator for Handheld Devices,”
Proceedings of ION GPS 2001, pp.1369~1373.
[6] K. Sagawa, M. Susumago, H. Inooka, “Unrestricted
Measurement Method of Three-dimensional Walking
Distance Utilizing Body Acceleration and Terrestrial
Magnetism,” Proceedings of the International
Conference on Control, Automation and Systems,
2001, pp.707~710.
[7] S. Y. Cho, C. G. Park, G. I. Jee, “Measurement
System of Walking Distance using Low-Cost
Accelerometers,” Proceedings of the 4th ASCC, 2002.
[8] Vincent Gabaglio, “Centralised Kalman Filter for
Augmented GPS Pedestrian Navigation,”
Proceedings of ION GPS 2001, pp.312~318.
2284
23rd International Technical Meeting of the Satellite Division of
The Institute of Navigation, Portland, OR, September 21-24, 2010You can also read