Visuo-Haptic Collaborative Augmented Reality Ping-Pong
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Visuo-Haptic Collaborative Augmented Reality Ping-Pong
B. Knoerlein G. Székely M. Harders
knoerlein@vision.ee.ethz.ch szekely@vision.ee.ethz.ch harders@vision.ee.ethz.ch
Computer Vision Laboratory
ETH Zurich
CH-8092 Zurich, Switzerland
ABSTRACT interfaces are necessary, which allow transferring skills and
In our current work we examine the development of visuo- knowledge from and to daily life.
haptic augmented reality setups and their extension to col- Using augmented reality environments as user interfaces
laborative experiences in entertainment settings. To this for games has been a topic of research for a while, as de-
end, an expandable system architecture supporting mul- scribed for instance in [7, 12, 18, 5, 8]. Some research re-
tiple users is one of the most indispensable prerequisites. lated directly to our example application of AR ping-pong
In addition, system stability, low latency, accurate calibra- have been carried out in the past. For instance, in [19] a
tion and stable overlay of the virtual objects have to be virtual table-tennis setup with real rackets has been devel-
assured. In this paper we provide an overview of our frame- oped. However, the system did not include haptic feedback
work and present our collaborative example application, an and only used the rackets as an interface to position a vir-
augmented reality visuo-haptic ping-pong game for two play- tual racket on the screen. A similar approach was also taken
ers. The users play with a virtual ball in a real environment in [11], which neither provided haptic feedback. In [13], a
while, by using virtual bats colocated with haptic devices, collaborative, mobile AR-based billiard game has been dis-
they are able to feel the impact of the simulated ball on the cussed, already incorporating tactile feedback. In most of
bat. these works, either no details on overlay accuracy, stabil-
ity and latency are given, or the reported results are of
lower quality. Regarding the integration of haptic feedback
Categories and Subject Descriptors in general AR setups only limited work has been carried
H.5.1 [Multimedia Information Systems]: Artificial, aug- out. Some groups have experimented with adding props
mented, and virtual realities; I.3.7 [Three-Dimensional to provide passive haptic feedback in the AR environment,
Graphics and Realism]: Virtual reality e.g.[14, 6, 15]. However, active behavior of scene objects can
not be generated with these systems. Recent research has
General Terms examined the possibility of adding devices providing active
haptic feedback. A few proof-of-concept systems have been
Design, Performance
developed in this context, for instance [17, 10, 20, 1]. How-
ever, lag reduction, exact alignment, or error minimization
Keywords is only seldomly addressed. Moreover, the haptic device is
Augmented reality, haptics, collaboration usually not colocated with the visual representation of the
augmented objects, thus compromising hand-eye coordina-
1. INTRODUCTION tion. In addition, if simultaneous interaction with real and
virtual objects should be allowed, visuo-haptic colocation in
The underlying idea of augmented reality (AR) systems is
the augmented scene is indispensable. In this context, the
the combination of real and virtual objects into one environ-
real world represents a reference frame into which the vir-
ment [2]. However, the perception of the augmented scene
tual elements have to be perfectly integrated. Any errors
is usually restricted to the visual domain and no haptic cues
in this process would reduce the usability of a system, and
are provided, limiting user interactions. The integration of
compromise user interaction and immersion.
haptic interfaces into AR systems removes this constraint
To alleviate the currently existing shortcomings, we have
and permits to not only see the virtual objects, but in ad-
developed a high precision, collaborative, colocated visuo-
dition to feel them. This can be used for numerous appli-
haptic augmented reality environment. Main components
cations where natural, three-dimensional human computer
are a distributed, low latency framework for synchroniza-
tion, the accurate calibration of the haptic device in world
coordinates and a hybrid tracking setup. In this short paper
Permission to make digital or hard copies of all or part of this work for we describe the developed framework and present an exam-
personal or classroom use is granted without fee provided that copies are ple testbed – multimodal AR ping pong. Figure 1 depicts
not made or distributed for profit or commercial advantage and that copies the overall setup for one user as well as his augmented view
bear this notice and the full citation on the first page. To copy otherwise, to of the scene.
republish, to post on servers or to redistribute to lists, requires prior specific
permission and/or a fee.
ACE’07, June 13–15, 2007, Salzburg, Austria.
Copyright 2007 ACM 978-1-59593-640-0/07/0006 ...$5.00.
Graphic loop Physic Haptic
loop loop
Transformtations
Grabbing of image requ 1 cycle 1 cycle
est Forces
Transformtations
1 cycle 1 cycle
Undistortion of Forces Transformtations
1 cycle 1 cycle
image Forces Transformtations
1 cycle Forces
1 cycle
Pose refinement sea Transformtations
ans r 1 cycle 1 cycle
we
r pa ching 1 cycle
Forces Transformtations
1 cycle
Drawing of cke Forces
t
background g 1 cycle 1 cycle
...
ckin te
Drawing of che upda 1 cycle 1 cycle
static objects for 1 cycle 1 cycle
1 cycle 1 cycle
Drawing of 1 cycle 1 cycle
interactive objects st
reque 1 cycle 1 cycle
Grabbing of image
...
...
...
Figure 2: Data exchange in the distributed system.
nected. A second haptic device is attached to a third 1.0GHz
single CPU machine (256MB RAM, 256kb cache) running a
haptics client. All components are using Linux OS. As ex-
Figure 1: View of the colocated visuo-haptic AR ternal tracker we use the infrared (IR) optical 6DoF tracking
system. device OPTOTRAK 3020 manufactured by Northern Digi-
tal Inc. The view of one user is captured by a head-mounted
Videre Design MEGA-DCS FireWire camera (640x480 pixel
2. COLLABORATIVE AR FRAMEWORK image at 30 fps). In addition, a user-independent top view
The computational requirements for achieving stable mul- of the scene is generated by an Allied Vision Technologies
timodal interaction in multiuser AR go beyond the capabil- FireWire camera (800x600 at 30fps). Since only one video-
ities of currently available hardware. Therefore, the sys- see-through HMD was available, one player currently has to
tem framework had to be distributed to several machines. rely on the images displayed via the overhead camera. A
The core components of our system are the physics server, a second HMD setup is already manufactured for our system.
graphics and a haptics client. The first machine performs the Finally, to allow touching of virtual objects, two SensAble
physical simulation of the virtual scene. A graphics client 1.5 PHANToM devices are integrated into our AR setup.
carries out all tasks typical to a standard AR setup. The As previously mentioned, the haptic devices are colocated
external input data needed on this client are position and with the augmented environment, thus allowing interaction
orientation of the haptic interfaces, as well as the move- with virtual and real objects via the same tool. Therefore,
ment of the virtual objects in the scene. Finally, haptic high demands for tracking and calibration have to be met,
interfaces can be added to the environment with the haptics which will be discussed in the following.
clients, which communicate directly with the physics server.
In our example setup, one device is directly connected to
the physics server, while a second interface is added via a 3. HYBRID TRACKING
haptics client. To provide high level of immersion, the vi- An IR marker is attached to the head-mounted camera
sual data acquired from the simulation always has to coin- and tracked by the OPTOTRAK system to determine the
cide with the moment the image was taken on the graphics- user’s head pose. The system measures and computes marker
machine. Therefore, accurate synchronization between the orientation and position with submillimeter accuracy at an
physics server and a graphics client is required. To this optimal distance of about two meters. Since the camera and
end, the actual clock difference is determined at startup of the marker are rigidly attached, the camera-marker trans-
the application. This computation is done by a comparison formation is fixed and can thus be determined by Hand-Eye
of the clocks on both machines, while taking into account calibration [16]. The IR tracking data are inherently noisy
the round trip time. After synchronizing both clocks, the due to the inaccurate measurements of the LED positions,
graphical data is stored in a timestamped ringbuffer and the especially when the head-mounted marker moves. As a con-
graphics client can request data for the timestamp the im- sequence, the registration between the real and the virtual
age was taken. The data are transmitted, temporarily stored world is affected, causing instability of virtual objects in
and updated when needed by the rendering process. There- the augmented images. Therefore, we correct the estimated
fore, no latency is added to the overall delay. One round trip camera pose of the IR optical tracker with a vision-based
of the communication takes 500−900µs for small-sized pack- approach. The first step is to detect precalibrated visual
ets. The data exchange between the physics server and the landmarks in the recorded images. Furthermore, to ensure
haptics client is collision free with a round trip time below that a landmark is sufficiently visible, an occlusion test is
200µs. Figure 2 illustrates all information communication carried out and occluded landmarks are discarded. Given
occurring in the framework. the 2D-3D correspondence of the remaining landmarks, the
In our testbed setup for two-player interaction in multi- position and the orientation of the camera are then refined
modal AR, the physics server is run on a dual processor PC by error minimization. An image space approach is used to
with 2.4GHz CPUs (2GB RAM, 512kb cache). Rendering estimate the camera pose as a nonlinear least squares prob-
and tracking on the graphics client is done on a dual pro- lem. A RMS backprojection error of less than 0.7 pixels can
cessor PC with 2.8GHz CPUs (2GB RAM, 512kb cache). be achieved in less than 1ms computation time. Moreover,
To the former a PHANToM is attached, while to the latter using additional offline refinement of 3D landmark positions,
the optical position tracking device and the cameras are con- the error can be further reduced to about 0.3 pixels [3].
pivot calibration [9], giving the marker-tip transformation.
This allows obtaining corresponding point measurements in
both the haptic and world coordinate system. After acquir-
ing 3D point data, the absolute orientation problem has to be
solved. Due to additional errors, resulting from inaccuracies
in haptic encoder initialization, a two-staged optimization
process is followed [4]. The final calibration results yield an
alignment error better than 1.5mm. Figure 3 demonstrates
the calibration results for visuo-haptic colocation. A virtual
table tennis bat is aligned with a real handle attached to the
haptic device.
5. COLLABORATIVE, VISUO-HAPTIC AR
PING-PONG
To demonstrate the high fidelity of the system, an AR
ping-pong environment was chosen as testbed scenario for
our collaborative visuo-haptic augmented reality system. This
choice has been driven by the importance of fast collabo-
rative interactions during gameplay. Real handles of table
tennis rackets are attached to the haptic devices. The actual
bat and the ball are, however, overlaid virtual objects. In
order to integrate the real table and the net, these objects
are initially calibrated in the world coordinate system, thus,
allowing the virtual ball to collide with them. A simplified
rigid body dynamics model is used for physical modeling
of the ball. The haptic devices are used to render impact
forces to the users and to control the virtual bat. The overall
rendering performance of the augmented scene at a resolu-
tion of 640x480 pixels is illustrated in Table 1. Due to the
multi-threaded implementation, the images are displayed at
about 20Hz with an overall latency of about 60 − 100ms.
The scene as shown to one of the users is depicted in Figure
4.
Component Average time [ms]
Frame rendering 15
Frame unwrapping 5
Corner detection + occlusion test 20
Pose refinement 0.6
Object rendering 5
Table 1: Rendering performance
Figure 3: Haptic device without (top) and with colo-
cated augmentation of a virtual bat (center,bottom) . 6. CONCLUSION
We have presented a colocated visuo-haptic augmented
reality environment for two-player ping-pong. A dedicated
4. HAPTIC DEVICE CALIBRATION system providing accurate calibration, high stability, and
In order to align the virtual representation of the hap- low latency had to be developed. A problem of the current
tic interaction point with the correct physical location in setup is the lack of binocular stereo cues. This limits the
the real world, the relationship between the haptic and the interactivity of the system since depth information has to
world coordinate system needs to be determined. The first be inferred from shadows, occlusions and motion parallax.
step of our calibration procedure is to collect 3D point mea- Moreover, the workspace of the currently used haptic device
surements in the coordinate systems of the haptic device and is rather limited. Therefore interactions are restricted to a
the optical tracker. To this end an optical marker is attached certain area. In addition, due to the used device only 3DOF
to the stylus of a PHANToM device. For the measurements, of force feedback can be provided.
the tip position is stabilized in the middle of the haptic Next steps will be the extension to stereo vision for better
workspace by rendering a fixation force with the device. The depth perception. In addition, to reduce network traffic and
marker assembly is then manually rotated following a spher- to ease the synchronization a hardware trigger signal will be
ical movement in space, while the marker poses are being integrated. Also, extension to 6DOF haptic feedback and
recorded. The best fitting sphere is then determined using alternative haptic devices will be investigated.
and I. Rudomin. Multi-user networked interactive
augmented reality card game. In International
Conference on Cyberworlds, pages 177–182, 2006.
[6] R. Grasset, J.-D. Gascuel, and D. Schmalstieg.
Interactive mediated reality. In Symposium on Mixed
and Augmented Reality, pages 302–303, 2003.
[7] T. Jebara, C. Eyster, J. Weaver, T. Starner, and
A. Pentland. Stochasticks: Augmenting the billiards
experience with probabilistic vision and wearable
computers. In Proc. 1st Int’l Symp. Wearable
Computers ISWC, pages 138–145, 1997.
[8] A. Lam, K. Chow, E. Yau, and M. Lyu. Art:
augmented reality table for interactive trading card
game. In Proceedings of the 2006 ACM international
conference on Virtual reality continuum and its
applications, pages 357–360, 2006.
[9] S. Lavalle, P. Cinquin, and J. Troccaz. Computer
Integrated Surgery and Therapy: State of the Art,
chapter 10, pages 239–310. IOS Press, 1997.
[10] T. Nojima, D. Sekiguchi, M. Inami, and S. Tachi. The
smarttool: a system for augmented reality of haptics.
In Proc. of IEEE Virtual Reality, 2002, pages 67–72,
2002.
[11] T. Ohshima, K. Satoh, H. Yamamoto, and H. Tamura.
AR2 hockey: A case study of collaborative augmented
reality. In Proc. VRAIS, pages 268–275, 1998.
[12] W. Piekarski and B. Thomas. Arquake: The outdoor
augmented reality gaming system. Communications of
the ACM, 45(1):36–38, 2002.
[13] U. Sargaana, H. S. Farahani, J. W. Lee, J. Ryu, and
W. Woo. Collaborative billiARds: Towards the
ultimate gaming experience. In ICEC, pages 357–367,
2005.
[14] D. Schmalstieg, A. Fuhrmann, G. Hesina, Z. Szalavari,
L. M. Encarnacao, M. Gervautz, and W. Purgathofer.
Figure 4: Colocated visuo-haptic AR ping-pong for
The studierstube augmented reality project. Presence
two players.
- Teleoperators and Virtual Environments,
11(1):32–45, 2002.
7. ACKNOWLEDGMENTS [15] R. Sidharta, J. Oliver, and A. Sannier. Augmented
reality tangible interface for distributed design review.
This work has been performed within the frame of the
In Computer Graphics, Imaging and Visualisation,
Swiss National Center of Competence in Research on Com-
pages 464–470, 2006.
puter Aided and Image Guided Medical Interventions (NCCR
Co-Me) supported by the Swiss National Science Founda- [16] R. Y. Tsai and R. K. Lenz. A new technique for fully
tion. autonomous and efficient 3D robotics hand/eye
calibration. IEEE Journal of Robotics and
Automation, 5(3):345–358, 1989.
8. REFERENCES [17] J. R. Vallino and C. M. Brown. Haptics in augmented
[1] M. Adcock, M. Hutchins, and C. Gunn. Augmented reality. In ICMCS, Vol. 1, pages 195–200, 1999.
reality haptics: Using ar toolkit for display of haptic [18] D. Wagner, T. Pintaric, F. Ledermann, and
applications. In Proc. of 2nd IEEE Intl Augmented D. Schmalstieg. Towards massively multi-user
Reality Toolkit Workshop, pages 1–2, 2003. augmented reality on handheld devices. In Pervasive,
[2] R. T. Azuma. A survey of augmented reality. pages 208–219, 2005.
Presence: Teleoperators and Virtual Environments, [19] C. Woodward, P. Honkamaa, J. Jäppinen, and E.-P.
6(4):355–385, 1997. Pyökkimies. Camball: augmented networked table
[3] G. Bianchi, C. Jung, B. Knoerlein, M. Harders, and tennis played with real rackets. In Advances in Comp.
G. Székely. High-fidelity visuo-haptic interaction with Entertainment Techn., pages 275–276, 2004.
virtual objects in multi-modal ar systems. In ISMAR [20] G. Ye, J. J. Corso, G. D. Hager, and A. M. Okamura.
2006, October 2006. Vishap: Augmented reality combining haptics and
[4] G. Bianchi, B. Knoerlein, G. Székely, and M. Harders. vision. In Proc. of IEEE Intl. Conference on Systems,
High precision augmented reality haptics. In Man and Cybernetics, pages 3425–3431, 2003.
Eurohaptics 2006, pages 169–177, July 2006.
[5] M. Diaz, M. Alencastre-Miranda, L. Munoz-Gomez,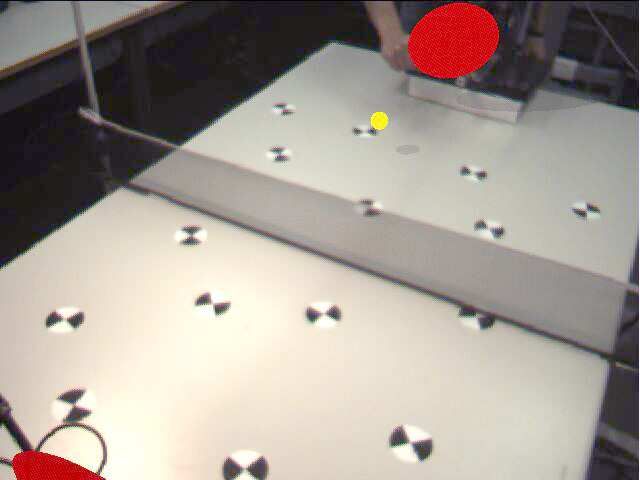
You can also read