Use of Unmanned Aerial Systems for Hydrological Monitoring
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Use of Unmanned Aerial
Systems for Hydrological Monitoring
Prof. Salvatore Manfreda and HARMONIOUS TEAM
Dipartimento di Ingegneria Civile, Edile e Ambientale (DICEA)
Professor of Hydrology and Advanced Monitoring - www.salvatoremanfreda.it
Chair of the COST Action Harmonious - www.costharmonious.eu
e-mail: salvatore.manfreda@unina.it
Twitter: @Sal_Manfreda
HARMONIOUS TEAM: Salvatore Manfreda, Brigitta Toth, David Helman, Giorgos Mallinis, Richard Lucas, Pauline Miller, Antonino Maltese, Petr
Dvořák, Sander Mücher, Giuseppe Ciraolo, Yijian Zeng, Zhongbo Su, Jana Müllerová, Nunzio Romano, Xurxo Gago, Ruodan Zhuang, Goran Tmusic,
Helge Aasen, Mike James, Gil Concalves, Eyal Ben-Dor, Anna Brook, Maria Polinova, Jose Juan Arranz, Janos Meszaros, Ruodan Zhuang, Kasper
Johansen, Yoann Malbeteau, Matthew McCabe, Isabel Pedroso de Lima, Corine Davis, Sorin Herban, Sophie Pearce, Robert Ljubicic, Salvador
Peña-Haro, Matthew Perks, Flavia Tauro, Alonso Pizarro, Silvano Fortunato Dal Sasso, Dariia Strelnikova, Salvatore Grimaldi, Ian Maddock, Gernot
Paulus, Jasna Plavšic, Dušan Prodanovic, Rafi Kent, Josef Brůna, Martynas Bučas, Joan Estrany, Adrien Michez, Martin Mokroš, Maria Tsiafouli,
João L. M. P. de Lima
2 Unmanned Arial Systems (UAS) for Environmental Monitoring
Scope: improve ability to monitor river basin processes
Variable of interests: state of the vegetation, soil water content, streamflow (flow
velocity and water level), flooded areas and river morphology.
Objective: To define integrated procedures to improve hydrological/hydraulic
monitoring capacity using UAS.
Scale: from plot-scale to the river basin scale providing operational monitoring tools.
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
3
Environmental Monitoring
Global Few hectars Few m2
Up to 30cm Up to 1cm Up to 1cm
Comparable Scales
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
4 UAS vs Satellite
(Manfreda et al., Remote Sensing 2018)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
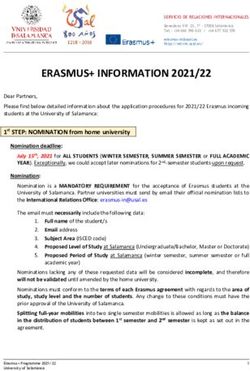
5 Number of articles extracted from the database ISI web of knowledge
3000 100%
automation of a single or multiple vehicles,
tracking and flight control systems, 90%
2500 hardware and software innovations,
80%
Percentage of Environmental Studies (%)
tracking of moving targets,
image correction and mapping performance 70%
2000 assessment
Number of Papers
60%
1500 50%
UAS applications
40%
1000 Environmental Applications
30%
Percentage of Environmental Studies
20%
500
10%
0 0%
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
2014
2015
2016
2017
Year
from 1990 up to 2017 (last access 15/01/2018)
(Manfreda et al., Remote Sensing 2018)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
6 CA16219 - COST Action HARMONIOUS
• A network of scientists is currently cooperating within the
framework of a COST (European Cooperation in Science and
Technology) Action named “Harmonious”.
• The aim of “Harmonious” is to promote monitoring strategies,
establish harmonized monitoring practices, and transfer most
recent advances on UAS methodologies to others within a global
network.
• HARMONIOUS involves 36 Countries
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
Action Chair Salvatore Manfreda
Vice Chair Brigitta Toth
Science Communications Manager: László Bertalan
STSM coordinator: Isabel De Lima WG2:
7
Training School Coordinator: Giuseppe Ciraolo Vegetation Status WG5: Harmonization of
ITC Grant Coordinator: Martin Mokros Leader Antonino Maltese methods and results
Vice leader Felix Frances Leader Eyal Ben Dor
Vice leader Jana Mullerova Vice leader Flavia Tauro
WG1: UAS data
processing
Leader Sorin Herban WG3
Vice leader Corine Davis Soil Water Content
Leader Yijian Zeng Harmonization
Vice leader Anna Brook of different
procedures
Geometric Correction WG4 and algorithms
and image calibration Leader Matthew Perks in different
Vice leader Dariia Strelnikova environments
River morphology
Contrast
Enhancement
Stream flow
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
8 Stay Connected with Us
Link Link
Link Link
Link
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
WG1
UAS data processing
9 Examples of Common Image Artifacts
a) saturated image;
b) vignetting;
c) chromatic aberration;
d) mosaic blurring in overlap area;
e) incorrect colour balancing;
f) hotspots on mosaic due to
bidirectional reflectance effects;
g) relief displacement (tree lean)
effects in final image mosaic;
h) Image distortion due to DSM
errors;
i) mosaic gaps caused by
incorrect orthorectification or
missing images.
(Whitehead and Hugenholtz, 2014)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II
WG2
Vegetation Status
10
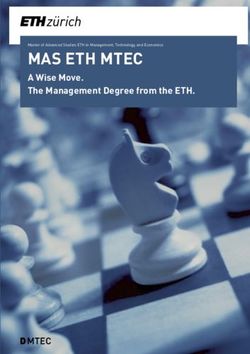
Comparison between a Satellite, CubeSat and UAS NDVI map
Multi-spectral false colour (near infrared, red, green) imagery collected over the RoBo Alsahba date palm farm
near Al Kharj, Saudi Arabia. Imagery (from L-R) shows the resolution differences between: (A) UAV mounted
Parrot Sequoia sensor at 50 m height (0.05 m); (B) a WorldView-3 image (1.24 m); and (C) Planet CubeSat data
(approx. 3 m), collected on the 13th, 29° and 27th March 2018, respectively.
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico IIWG3
Soil Water Content Monitoring
11
a) Soil moisture downscaling
workflow based on random
forest regression (RF);
b) The importance of land
surface features for the RF
model;
c) RF-based soil moisture
products at 15cm;
d) Comparison of the
downscaled soil moisture
with in-situ measurements.
(Su et al., Water 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico IIWG4
River Monitoring
12
Image Velocimetry
2-D flow velocity field derived using
an optical camera mounted on a
quadcopter hovering over a portion
of the Bradano river system in
southern Italy. One of the images
used for the analysis is shown as a
background, where surface
features used by flow tracking
algorithms are highlighted in the
insets (a, b).
(Manfreda and McCabe, Hydrolink 2019)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II13
Stream Flow Monitoring – Data Collection for
Benchmarking Optical Techniques
Image velocimetry data available for 13 case studies Article: (Perks et al., ESSD 2019)
Data: (Perks et al., ESSD 2019)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico IIWG4
River Monitoring
14
Comparison among the most recent Image Velocimetry Techniques
(Pearce et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico IIWG4
River Monitoring
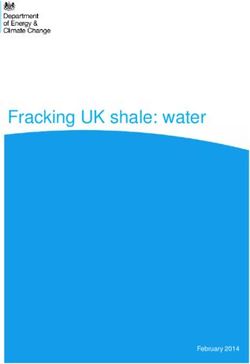
15 UAS data Collection: How to improve DSM accuracy
10 0 10 1
Fig. 1: Comparison of results obtained changing
(A) (B)
(A) (B) (C)
Single Flight Single Flight
the number of GCPs and adopting a single flight
Combined Flights Combined Flights
10 -1
10 0
RMSEX,Y (m)
RMSEZ (m)
10 -2
RMSE X,Y= 0.2cm RMSE Z= 10cm
or a two flights dataset on the plane (A) and z-
(D) (E) (F) 10 -3
10 -1
axes (B).
RMSE Z= 3.5cm
10 -4 10 -2
3 4 5 6 7 8 9 3 4 5 6 7 8 9
N. GCPs N. GCPs
Fig. 1 Fig. 2: RMSE of the 3D model as a function of the
mean distance between GCPs obtained for the
Relative change of RMSEX,Y (%)
500 300
Relative change of RMSEZ (%)
(B)
flight N.2 (A, B) and for the combination of
(A) 3 GCP 3 GCP
400 4 GCP 4 GCP
5 GCP 200 5 GCP
Fligth Fligth plan Level Camera Avg GSD Images 300 6 GCP 6 GCP
flights N.1 and N.4 (C, D).
7 GCP 7 GCP
Above the Tilt (cm/px ) 8 GCP 100 8 GCP
200 9 GCP 9 GCP
Ground (degree) R2=0.15
(m) 100 0
N.1 60 0° 1.9 276 0
-100 R2=0.08
-100
N.2 60 0° 1.9 268 -200 -200
0 50 100 150 0 5 10 15
Mean Planar Distance (m) Mean Vertical Distance (m)
N.3 60 70° - 271
Relative change of RMSEX,Y (%)
600 500
Relative change of RMSEZ (%)
(C) 3 GCP (D) 3 GCP
500 4 GCP 400 4 GCP
N.4 60 20° 2.0 273 400
5 GCP 5 GCP
6 GCP 300 6 GCP
7 GCP 7 GCP
300 8 GCP 8 GCP
2 9 GCP 200 9 GCP
N.5 60 0° 1.9 257 200 R =0.16
100 R2=0.00
3.3 85
100
0
0 UAS-based tiled Model
N.6 120 0° -100
-100
-200 -200
0 50 100 150 0 5 10 15
Mean Planar Distance (m) Mean Vertical Distance (m)
Fig. 2 (Manfreda et al., Drones 2019)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II16 Guidelines for UAS-based monitoring Action Deliverables
(Tmušić et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico IIThe influence of various study conditions on the output quality
17
of a UAS observation
• output product
• quality parameters
• software and hardware
• experiment design
• environmental conditions
• internal (affected) parameters
NB: The arrow color indicates the type of relationship: gray -
direct dependence, orange - inverse dependence.
(Tmušić et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II18 Activities involved in UAS-based Mapping
(Tmušić et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II19 (Dis)advantages of Different Platforms
(Tmušić et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II20
Preliminary Checklist before Flying
(Tmušić et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II21
Metadata Associated with
each UAS-survey
A detailed description of the flight characteristics and
preprocessing activities carried out on the published
data is extremely useful, not only for scientific
reproducibility, but also to guarantee a certain quality,
while also advancing and educating the broader field.
All potential variables and details about a survey are
listed in the UAS survey form reported herein.
(Tmušić et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II22 Proposed UAS Environmental Mapping Workflow
(Tmušić et al., Remote Sensing 2020)
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II23 Final Remarks
• UAS-based remote sensing provides new advanced procedures to monitor key variables,
including vegetation status, soil moisture content, and stream flow.
• The detailed description of such variables will increase our capacity to describe water
resource availability and assist agricultural and ecosystem management.
• HARMONIOUS COST Action is supporting the definition of standardized protocols for
UAS-based applications to improve reliability of such technology.
• Aim of the next activities is to specialize these guidelines on specific aspects and build
new tools to support the use of UAS for environmental monitoring.
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico II24 Publications produced by the COST Action HARMOIOUS
Tmušić, G.; Manfreda, S.; Aasen, H.; James, M.R.; Gonçalves, G.; Ben-Dor, E.; Brook, A.; Polinova, M.; Arranz, J.J.; Mészáros, J.; Zhuang, R.;
Johansen, K.; Malbeteau, Y.; de Lima, I.P.; Davids, C.; Herban, S.; McCabe, M.F. Current Practices in UAS-based Environmental
Monitoring, Remote Sensing, 12, 1001, 2020. [pdf]
Pearce, S.;R.; R. Ljubičić; S. Peña-Haro; M. Perks; F. Tauro; A. Pizarro; S.F. Dal Sasso; D. Strelnikova; S. Grimaldi; I. Maddock; G. Paulus; J.
Plavšić; D. Prodanović; S. Manfreda, An Evaluation of Image Velocimetry Techniques under Low Flow Conditions and High Seeding
Densities Using Unmanned Aerial Systems, Remote Sensing, 12, 232, 2020. [pdf]
Perks, M. T., S. Fortunato Dal Sasso, A. Hauet, S. Pearce, S. Peña-Haro, F. Tauro, S. Grimaldi, B. Hortobágyi, M. Jodeau, J. Le Coz, I.
Maddock, L. Pénard, and S. Manfreda, Towards harmonization of image velocimetry techniques for river surface velocity
observations, Earth System Science Data Discussion, 2019. [pdf]
Manfreda, S., S. F. Dal Sasso, A. Pizarro, F. Tauro, Chapter 10: New Insights Offered by UAS for River Monitoring, Applications of Small
Unmanned Aircraft Systems: Best Practices and Case Studies, CRC Press, Taylor & Francis Groups, 211, 2019.
Manfreda, S., M.F. McCabe. Emerging earth observing platforms offer new insights into hydrological processes, Hydrolink, 1, 8-9,
2019. [pdf]
Manfreda, S., P. Dvorak, J. Mullerova, S. Herban, P. Vuono, J.J. Arranz Justel, M. Perks, Assessing the Accuracy of Digital Surface Models
Derived from Optical Imagery Acquired with Unmanned Aerial Systems, Drones, 3(1), 15, 2019. [pdf]
Manfreda, S., M. F. McCabe, P. E. Miller, R. Lucas, V. Pajuelo Madrigal, G. Mallinis, E. Ben-Dor, D. Helman, L. Estes, G. Ciraolo, J. Müllerová,
F. Tauro, M. I. de Lima, J. L. M. P. de Lima, A. Maltese, F. Frances, K. Caylor, M. Kohv, M. Perks, G. Ruiz-Pérez, Z. Su, G. Vico, and B. Toth, On
the Use of Unmanned Aerial Systems for Environmental Monitoring, Remote Sensing, 10(4), 641; 2018. [pdf]
Prof. Salvatore Manfreda – Università degli Studi di Napoli Federico IIYou can also read