The performance of a new PTV algorithm applied in super-resolution PIV
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Experiments in Fluids 32 (2002) 346±356 Ó Springer-Verlag 2002
DOI 10.1007/s003480100363
The performance of a new PTV algorithm applied in super-resolution PIV
R.J.M. Bastiaans, G.A.J. van der Plas, R.N. Kieft
346
Abstract In this paper, we investigate the performance of PTV processing. In the PTV step, the displacements of all
particle tracking, exploring the in¯uence of an increasing individual particles are reconstructed. This technique,
amount of estimators. Basically, a simple method to de- which is called super-resolution particle image velocimetry
termine particle matchings was used. Then, ®rst, temporal (SRPIV), has two signi®cant advantages: both the accuracy
extrapolation as well as spatial interpolation are employed. and the resolution of the velocity estimation are increased.
Second, a PIV processing step was incorporated. Tests Resolution is increased because using PIV to estimate a
from simulations show that at relatively high seeding particle's displacement allows a PTV algorithm to search a
densities the performance was increased by a factor of 4 smaller region for a particle match. Thus, the seeding
and 13 for the ®rst and second step, respectively. In a density can be increased. This is con®rmed by results
physical experiment of a wake behind a heated cylinder, a obtained by Keane et al. (1995) for auto-correlation.
clear performance improvement in the case of PIV pre- Concerning accuracy, Cowen and Monismith (1997) show
processing was observed. that their PIV-guided PTV algorithm is inherently more
accurate than their cross-correlation-based PIV algorithm,
1 both applied to two single exposed images. One of the
Introduction reasons for this is that PTV is less affected by the presence
To measure the 2D velocity ®eld in a ¯ow, several tech- of displacement gradients.
niques have been developed based on visualisation of An additional advantage of SRPIV is that the need for
tracer particles. Each technique has its own method of having several sequential images to achieve a successful
image recording and processing to extract the velocity data. particle-tracking result at relatively high seeding densities
Several of these techniques, e.g. particle-tracking velocim- is circumvented. In SRPIV, two images are suf®cient to
etry (PTV) and particle image velocimetry (PIV) are quite obtain tracking results. This is useful in situations where it
well known. In PTV, individual particles are tracked in is not possible to obtain more than two sequential images
subsequent images, whereas in PIV, the averaged dis- due to practical limits.
placement of particles is determined in corresponding In this paper, we investigate the performance of both
image segments of two sequential images. These methods PTV and SRPIV algorithms. There exists a wide variety of
can also be applied to one multiple exposed image. PTV and PIV algorithms. Here, the emphasis is on the
Keane et al. (1995) were one of the ®rst to combine the extension of PTV. Therefore, we take a standard classical
techniques of PTV and PIV. They used the PIV estimation cross-correlation PIV method, with proven performance,
of the local convoluted velocity ®eld as an input for the for the present SRPIV processing. A large number of PTV
methods are described in the literature (e.g. Dalziel 1993,
Dracos and Malik 1992, Guezennec et al. 1994, Hassan and
Received: 4 April 2001 / Accepted: 9 August 2001 Canaan 1991, Khalighi and Lee 1989, Maas et al. 1993,
Malik et al. 1993, Nishino et al. 1989, Okamoto et al. 1995,
R.J.M. Bastiaans (&), G.A.J. van der Plas, R.N. Kieft Pervez and Solomon 1994, Wernet 1993, Yagoh et al.
Division of Internal Combustion Engines, 1993). Many PTV algorithms are quite complicated,
Energy Technology Division, and Fluid Dynamic Laboratory computationally expensive and sensitive to their settings
Department of Mechanical Engineering, and the recorded ¯ows. Therefore, it was decided to
And Department of Applied Physics, develop a straightforward well-de®ned PTV algorithm
J.M. Burgers Centre for Fluid Mechanics,
Eindhoven University of Technology, suitable for the present purpose, i.e. analysing the per-
P.O. Box 513, 5600 MB Eindhoven, The Netherlands formance of PTV and SRPIV. Furthermore, the new PTV
e-mail: r.j.m.bastiaans@tue.nl method serves as a basis for the development of a 3D PTV
code, of which ®rst results are reported in Kieft (2000) and
This research was funded by the Eindhoven University of Schreel et al. (2000).
Technology and the Dutch J.M. Burgers Centre for Fluid The paper starts with a description of the PTV algo-
Dynamics.The experimental work here is part of the research rithm in Sect. 2. Apart from the application of a minmax
programme of the Netherlands Foundation for Fundamental
Research on Matter (FOM), which is ®nancially supported by the ®lter, it differs essentially from other methods in the solver
Netherlands Organisation for Scienti®c Research (NWO). The of the matching problem. This solver is developed on the
authors would like to take the opportunity to thank the technical basis of solution methods for the well-known assignment
staff of the Energy Technology section for their support. problem (e.g. Winston 1991). It turns out that a verysimple, ef®cient and computationally cheap and straight- between neighbouring particles'). Then the majority of
forward method can be deduced. In Sect. 3, the applied particles will be matched correctly even if no prediction
PIV is described, after which the combination of PIV and scheme is employed, i.e. we have zero-order prediction.
PTV into SRPIV is treated in Sect. 4. The performance and Higher orders of spatial and temporal prediction will be
operational parameters of the algorithm for PTV and available after tracking several frames and this improves
SRPIV are determined by tests with synthetic image data, the matching results signi®cantly. Earlier experiences with
which are given in Sect. 5. In Sect. 6, the algorithm was the algorithm of Dalziel (1993) showed this to be true and
tested using the experimental data of Kieft et al. (1999), this is con®rmed by the results later on in this article.
who investigated the ¯ow phenomena occurring in the There are several things an adequate solver should do.
wake behind a heated cylinder. The paper ends with First, the solver should ®nd a set of independent match-
conclusions on the different methods in Sect. 7. ings. A matching between particle i from frame f
347
and particle image j from frame f + 1 is denoted by
2 a fij 1, otherwise afij 0. A set of matchings is de®ned to
The PTV algorithm be independent if
X f
X f
2.1 8i aij 1 and 8j aij 1 2
Components of the method j i
In this section, the components of the PTV algorithm that
are new or relevant for the present study are described. A Furthermore, the set should contain as many matches as
more detailed description of the PTV processing is given possible. The maximum number of possible matchings is
in Bastiaans et al. (2001). The next paragraph is concerned determined by the minimum number of observed particle
with the matching algorithm. Although based on older images over the two ®elds involved. Finally, the
methods, the matching algorithm is new. The advantages sum of afijcfij over all values of i and j should be as low as
of the matching scheme are threefold; it is very effective, it possible. The problem of ®nding the optimal set of rela-
is computationally fast and it is easy to implement. tions between two data sets de®ned by an evaluation
The prediction algorithm in the PTV part is of relevance function is known as the assignment problem in opera-
in increasing the estimations about the displacement ®eld. tions research (see e.g. Winston 1991) and can be solved
The matching can be improved by not using the real po- by the extended Munkres algorithm as developed by
sition of the particles in each ®rst frame f, but instead Bourgeois and Lassalle (1971).
using an estimation of their position in the second frame However, the Munkres algorithm has three disadvan-
f + 1. The estimation may originate from extrapolation in tages. First, it tries to match particles for evaluation
time, as well as interpolation in space. The temporal function values representing distances larger than the
extrapolation is calculated by Lagrange's extrapolating maximum interframe displacement of particles. Second, a
polynomial of degree Nt)1 through the last Nt points of the large matrix of the evaluation function values has to be
particle path. Spatial interpolation is performed on the stored and third, solving requires much computation time,
basis of a spatial convolution of the data with either a proportional to N3p, with Np the number of particles found
tophat or a Gaussian of width D. Here, either surrounding in a ®eld.
matches or PIV data may be involved. The latter case The ®rst disadvantage can easily be solved by de®ning a
speci®es the SRPIV method. restriction on the maximum matching distance, Drmax,
beyond which no valid relations can occur. The added
2.2 restriction of a maximum matching distance allows a dif-
Matching ferent, easier solution of the problem. A simple solver was
For the matching procedure, one may de®ne an evaluation developed which globally optimizes for pairings up to a
function to express the likelihood that one particle image speci®ed maximum matching distance. At the same time,
in one frame and another particle image in the next frame it uses a much smaller sized sparse matrix and it is con-
corresponds to the same particle in the ¯ow ®eld. A solver siderably faster. This, so-called 'sort matching' algorithm,
using the evaluation function is then applied to ®nd the works as follows:
best set of pairings between two images. The following Step 1: Store all values of the evaluation function, cfij, of
basic evaluation function is used: possible pairings within the de®ned maximum
f f 1 if matching distance, Drmax, in a sparse matrix.
cij xi xj ; 1 Step 2: Sort pairings on size of these evaluation function
if values.
where xj is the estimated position of particle j from frame
Step 3: Determine independent set of pairings, starting
f in frame f + 1. If there is a good estimation of the
with the lowest value of the evaluation function.
movement of the particles or if the displacements are very
f
small, then low values of cij correspond to a high proba- The lowest value corresponds to a match. Subsequent
bility that two particle images originate from the same values correspond to matchings if both partners i and j
physical particle. of the pair are still unmatched, i.e. if
Suppose that the average interframe displacement of X f X f
particles is smaller than the mean minimum distance aij 0 and aij 0:
between particles (frequently denoted by `mean distance j iFor sorting a standard `Quicksort' routine is used (see denoted by M. Therefore, at constant concentration, the
e.g. Press et al. 1994). The implementation of the matching thickness of the light sheet is limited. Furthermore, a large
algorithm as described above results in a computational advantage of the SRPIV procedure is the possibility to
processing time which is a fraction of the total PTV exe- process sequences with a large displacement Dsmax com-
cution time. pared to the mean distance between nearest neighbouring
particles rn. The number of particles per unit area is CDz0
3 and the mean distance between nearest neighbouring
The PIV algorithm particles in the planar projection of the light sheet is then
In order to perform the SRPIV, a PIV correlation tech-
nique is used to estimate the displacements of groups of rn 4CDz0 1=2 : 5
particles. The employed PIV algorithm is based on stan- The theory of the SRPIV procedure was described and
348
dard 2D FFTs. These are applied to corresponding inter- evaluated by Keane et al. (1995). In analyzing experi-
rogation areas of the subsequent single exposed images. mental turbulent ¯ow PIV data, they found an increase of
Therefore, it is a cross-correlation method. The average spatial resolution by a factor of 2.5 in each direction.
displacement of the particles in an interrogation area is Furthermore, Cowen and Monismith (1997) employed the
determined by the localisation of the centre of the corre- technique with synthetic images and for images recorded
lation peak. An estimation of this position is obtained by a from a turbulent boundary layer. They conclude that the
Gaussian ®t according to Willert (1989). This is based on results of the application of their SRPIV method are su-
the assumption that particle images and, therefore, the perior to the results attained by their PIV alone. This in the
covariance function are approximately Gaussian shaped. sense that not only resolution can be improved, but also
In the present PIV method, velocity gradients in an that the accuracy can be enlarged.
interrogation area are responsible for a gradually in- The difference of the present method with the two
creasing loss of correlation at larger displacements. mentioned above is in the particle-tracking algorithm.
Therefore, according to Westerweel (1993) (discussed in Both Keane et al. (1995) and Cowen and Monismith (1997)
more detail in Westerweel 1997), a correlation correction use a window method de®ning the estimated area to which
factor is calculated. a particle advects. If there are two particles in this window,
A measure for the quality of the correlation is given by the matching is ambiguous and must therefore be dis-
the ratio of highest and second highest peak. The quality of carded. Obviously, no matching can be established when
the correlation can be used to discard unreliable data. A there is no particle at all in this window. By minimizing the
more detailed description of the PIV algorithm, together global constraint, as speci®ed in the matching algorithm in
with accuracy tests, is given in Bastiaans (2000). Sect. 2.2, the present PTV method should be able to obtain
a larger yield without loss of accuracy.
4 Thus, the advantages of using SRPIV compared to
SRPIV classical PIV are the enlarged yield and accuracy. With
Now, the described PTV and PIV techniques can be com- respect to PTV, the advantages are the ability to process
bined to SRPIV. Of course, this can only be applied in a only two sequential images at relatively large image den-
satisfactory way if the seeding density ful®ls some sities and image sequences with relative large advection
requirements. For the present classical PIV estimation, the distances. This can be done with only a small maximum
image density should be within upper and lower limits to matching distance, Drmax, obtaining high-quality data.
obtain a well-de®ned correlation. Furthermore, the spatial If we are not dealing with a starting ¯ow, the PTV al-
velocity ¯uctuations within an interrogation area should be gorithm as described in previous sections shows a tran-
relatively small. Therefore, there is a minimum amount of sient in the quality of the output. Errors could be kept low
particles required to represent a ¯ow structure adequately. by using a small maximum matching distance, but then
Additional limits for the seeding density are given by the the yield will show a transient starting at very low values to
PTV processing step. A high seeding density would be higher values due to the neighbourhood estimation.
preferable to obtain a high-resolution velocity ®eld sam- However, this will work only if the seeding density per ¯ow
pling. However, in the PTV method, the necessity to structure is high enough, a condition that also has to be
identify single particles is even more severe, when com- met for performing a resolved PIV (for lower seeding
pared to PIV. The PTV identi®cation of particles is per- densities, a mean displacement could still be obtained).
formed by using a threshold. Thus, it is important to have a Thus, if the seeding density per ¯ow structure is large
minimum amount of overlapping particles. For randomly enough, an additional advantage is obtained by the ap-
distributed particles, the fractional amount of overlapping plication of SRPIV by omitting the transients.
particle images, Po, is given by Bastiaans (2000) as The SRPIV algorithm is implemented by considering
4Ns the background displacements estimated by PIV as addi-
Po 1 e ; 3 tional matchings in the neighbourhood estimation. By
in which Ns is the source density according to Adrian (1991) omitting the temporal extrapolation, we obtain a separated
scheme for PIV estimation and PTV matching, involving
p CDz0
Ns de2 ; 4 also the temporal extrapolation results in a mixed scheme
4 M2 in which only the displacement of previously unmatched
for particles of image diameter de at concentration C. The particles is estimated by both the surrounding matchings
thickness of the light sheet is Dz0 and the magni®cation is of PTV and the PIV displacements. Besides performing aPIV estimation for the entire sequence, the implementa- the image quality (qi) and the sampling quality (qs). A good
tion can handle the use of PIV estimation of one image image quality implies low noise and well-detectable particle
pair for the entire sequence in case of steady ¯ow or sta- blobs in an image. The sampling quality means how well
tistically steady turbulent ¯ow (with relatively low turbu- the particle tracks can be reconstructed. Therefore, both qi
lence intensity). Furthermore, the present SRPIV and qs depend on the source density Ns as de®ned in Eq. 4.
processing is also able to handle sequences in which there However, for the synthetic image sequences in which
is only a random set of PIV estimations of all possible distances are measured in pixels and the number of par-
subsequent image pairs. ticles Np is known, the source density can be rewritten as
p Np
5 Ns de2 : 8
Performance tests with synthetic data 4 AI
349
Then the mean minimum particle distance is given by
5.1 1
Synthesized image data AI 2
r ; 9
The developed algorithm was tested with synthetic images n 4NP
of a well-de®ned ¯ow ®eld. The synthetic images were
composed of several components representing important with the particle diameter de and the image area AI mea-
features of real-image sequences. The images are grey-level sured in pixels and square pixels, respectively. At high
images with 256 grey values, 0 to 255. Particles are rep- source densities, individual particles cannot be discerned
resented as Gaussian-shaped intensity blobs. For each from each other anymore and PTV processing will fail.
pixel value, the particle intensity is integrated over the Therefore, we consider relatively low source densities.
pixel area, after which images are scaled to the maximum For determining the sampling quality of an image se-
grey value. High-wave-number noise, as well as back- quence, the displacement of the particles between images
ground variations, can be added easily. This in combina- with respect to the mean minimum interparticle distance
tion with particle images and overlapping particles is of importance. If there is no information available about
saturate to the maximum grey value. the displacement ®eld, a high value of the maximum
The stream function describing the 2D vortical ¯ow particle displacement, Dsmax, compared to the mean min-
®eld chosen for advecting the randomly distributed par- imum particle distance, rn, results in a high uncertainty
ticles is given by about which particle images correspond to each other.
Therefore, the sampling quality is expressed as the ratio
w x; y sin px sin py 6 between rn and Dsmax, occurring between two images,
on W (0,1) ´ (0,1). The velocity, u, can be calculated rn
qs : 10
with its de®nition, Dsmax
@w @w This sampling quality gives an indication of the track-
u ; : 7 ability of an image sequence, which can be understood by
@y @x
considering the effect of an increasing Dsmax for a constant
Particle trajectories can be integrated using a series rn .
expansion with respect to time, up to any order. A tenth- Besides the quality of the image sequence, the algorithm
order expansion was implemented (more details are given parameters are also of importance for the tracking results.
in Bastiaans 2000). For the time steps that are used in the The choice of values for the maximum matching distance,
present study, an accuracy of at least 10)6 image width per the prediction order and the neighbour weighting function
time step is guaranteed. For the image size of 5122, this width, D, is just as important as the image sequence
translates to 5 ´ 10)4 pixels per time step. The maximal quality.
particle displacement Dsmax occurring in the image is pdt.
Because of the shear in the ¯ow, one can study the effects
of merging and separation of particles on the performance 5.3
of the tracking algorithm. The lack of particle loss across PTV tests with synthesised images
the boundary allows tracking for long periods without Some tests were performed to determine the in¯uence of
seeding new particles in the ¯ow. Furthermore, the ab- image sequence quality and algorithm parameters on the
sence of singularities in the ¯ow keeps the particles evenly performance of the particle-tracking algorithm. An over-
distributed over the image. view of the different tests and their parameter values are
shown in Table 1. From the tracking results, the fractional
yield (c) and the mean velocity error (l|Dv|) were deter-
5.2 mined per image and analyzed. The overall performance,
Tracking and algorithm parameters gv, of the tracking is expressed as
The performance of the tracking algorithm is in¯uenced by p
hc i
the quality of the image sequence and the setting of the gv D vE ; 11
tracking parameters. The quality of the measured image ljDvj
sequence determines whether or not tracking results
representative for the measured ¯ow ®eld can be obtained. with time-averaged quantities denoted by hi and the
The quality is determined by two important factors, velocity yield, cv, is the number of particle paths withTable 1. Test parameters: mean minimum interparticle distance, The next tests are performed for a sampling quality of
rn, maximum particle displacement, Dsmax, maximum matching qs 1, which is a relatively dif®cult case for any PTV
distance, Drmax, interpolation radius, D, and the number of points algorithm. Without a prediction scheme the performance
for temporal extrapolation, Nt. Distances are multiplied by 512 to
express their values in pixels. A set of three numbers indicates a
is about 7, as obtained from test run B. A sampling quality
sequence of values, in which the ®rst number corresponds to the of 1 contains suf®cient information to start tracking and
®rst value, the second number to the end value and the third there is ample room for improvement of the tracking
number is the step size result. In test run C, temporal prediction is used to
improve the results. The success of the temporal predic-
Test run dN á 512 Dsmax á 512 Drmax512 D á 512 Nt tion scheme depends, of course, on the accuracy with
A 8 4 2 16 0.5 0 1 which the particle position in the next frame can be
B 8 4 12 2 4 12 2 0 1 expected. Flow dynamics, prediction scheme and magni-
350
C 8 8 8 0 151
D 8 8 0.8 8 0.8 0 2
E 8 8 0.8 8 0.8 8 2
suf®cient length to calculate the velocity using a discrete
second-order central time derivative of the position. For
each test performed, the above quantities were calculated
and analyzed. Each test consisted of an image sequence of
100 images. Each image of 5122 pixels contained
1024 particles. The half-width rp of the Gaussian-shaped
particles was set to rp 1.5 pixels. This results in a source
density of Ns 0.0276 and a fractional overlap of
Po 0.1046. Furthermore, the fraction of particles that
cannot be validated because they are connected to the
image edges is 0.0117. Therefore, the maximum yield
possible is 88.4%. The mean minimum particle distance rn
amounts to 8 pixels. The tests were run on a PC running
Unix, with a Pentium MMX processor at 200 MHz, taking
circa 1 min to process one image sequence.
Results of the experiments are discussed in the next
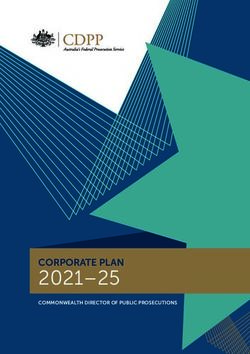
paragraphs. The values of c, l|Dv| and gv of test runs A and
E are given in Figs. 1 and 2. Results of test runs B, C and D
will be summarized only.
In test run A, an image sequence is taken with a relative
high sampling quality of 2.0. The performance of the al-
gorithm, without any prediction schemes, was tested for
different maximum matching distances. Results show that
the performance peaks at Drmax equals Dsmax. A logical
result, since a maximum matching distance smaller than
the maximum particle displacement will certainly result in
unmatched particles, which, in fact, should be matched. A
maximum matching distance larger than the maximum
particle displacement will allow for unnecessary erroneous
matching relations. However, the increase in mean velocity
error at larger maximum matching distances is limited due
to the global optimization in the matching procedure.
The same algorithm settings were used in test run B to
test the in¯uence of the sampling quality on the perfor-
mance by varying the maximum particle displacement.
The maximum particle displacement was varied with the
sampling time for the images. The maximum matching
distance was set equal to the maximum particle displace-
ment. This results in an increasing l|Dv| and a decreasing c,
giving a decreasing overall performance with decreasing
sample quality. At a sampling quality of qs 2/3, the
performance drops from approximately 36 to about 2. A
low sampling quality causes a large number of erroneous
particles to be matched. As a result, the average length of
particle paths decreases, causing a decreasing value of the Fig. 1. Results for test case A, qs 2.0, maximum matching
velocity yield. distances in fractions of the entire image size of 512 pixelsSpatial prediction can be used to improve the matching
yield of particles for which no temporal prediction is
possible. This should improve yield and accuracy and,
therefore, performance. Tests for comparing the results for
tracking with and without spatial prediction were done
with different maximum matching distance values in test
runs D and E. Again the sampling quality was 1 and Nt was
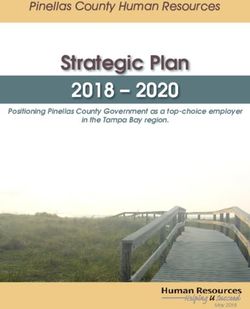
equal to 2. In Fig. 2, results are shown for case E, in which
spatial prediction was activated. The results for D and E
are similar in shape, but the case which includes spatial
prediction clearly shows an improvement in yield, accu-
351
racy and performance, as expected. For the reference case,
the performance is increased from about 24 to about 28.
Additional testing has shown that, for this type of large-
scale ¯ow, the performance improvement due to spatial
prediction is more or less constant for any reasonable
value of D. Furthermore, the sensitivity of the exact setting
of Drmax for the performance is decreased, as can be ob-
served from a comparison of test case A with E (Figs. 1 and
2). In test case A, there is a sharp performance peak,
whereas in test case E, the maximum is constant for a
range of Drmax.
According to the above results, the best algorithm set-
tings are Nt 2, Drmax Dsmax and D set to any reason-
able value for the distances between particles. Of course,
the scales in the ¯ow must also be taken into account. In
the present case, at qs 1, the mentioned settings of the
algorithm result in an increase of the performance from 7,
without any additional estimations, to 28, in the case of
optimal settings. Sometimes the results can be improved
somewhat by changing these suggested parameter settings
a little. One can easily think of certain situations where the
presented optimal settings might not the best choice. For a
stationary ¯ow, one could easily improve performance by
decreasing the Drmax. Although at the ®rst samples per-
formance would be decreased, due to spatial prediction in
the long run, performance would improve. However, in
most cases, the ¯ow is unsteady or highly turbulent and
Drmax Dsmax would be better.
5.4
SRPIV tests with synthesized images
A further increase in performance is expected if the PTV
algorithm is adapted for SRPIV purposes. The spatial
prediction code was extended in order to use the PIV re-
sults for the spatial velocity prediction. PIV was performed
Fig. 2. Results for test case E, qs 1.0, maximum matching on frame 1 and 2 of the particular image sequence of test
distances in fractions of the entire image size of 512 pixels C, which has a sampling quality of 1. The size of the in-
terrogation areas was chosen to obtain an image density of
tude of the error in the particle position are of importance. 16, i.e. the interrogation areas contain 16 particle images
Clearly, extrapolation order 1, Nt 2, or higher is best, on average, in order to obtain a well-de®ned correlation.
improving both the results for yield and accuracy. At these Thus, interrogation areas of 64 ´ 64 pixels are used, with
values, the performance is increased from 7 to about 23. an overlap of 32 pixels. This results in 15 ´ 15 interroga-
However, for order-4 extrapolation, some decrease in the tion areas, of which there are only 8 ´ 8 independent data
performance is observed. For this case, the yield is still at a points. Therefore, by using PIV alone, the fractional ve-
high level, but the velocity errors start to grow. Since our locity yield, cv, is only 1/16. The accuracy of the PIV es-
test ¯ow ®eld only has large scales, the extrapolation errors timation could be evaluated as well. However, the PIV
are mainly caused by the errors in the particle positions. results give an estimation of the convoluted velocity ®eld,
These small errors may give poor estimations of the new which is an estimation of the local velocity if the interro-
particle positions at high orders of the temporal gation areas are small compared to the size of the ¯ow
extrapolation. structures. A comparison of actually obtained velocityvectors with the convoluted analytical ¯ow ®eld would fall more or less independent of the maximum matching dis-
beyond the scope of the present paper. The PIV results tance. At very small maximum matching distances, the
were used for spatial prediction for processing the full SRPIV shows a slightly increased performance. Addition-
sequence. ally, a smaller maximum matching distance allows for a
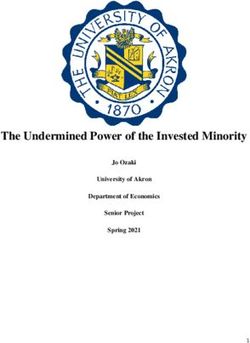
The results of the SRPIV are shown in Fig. 3. Clearly, smaller mean minimum particle distance, which can be
the SRPIV result has a higher yield and accuracy and thus used to increase the particle density and thus the resolu-
a much higher performance. The velocity yield is equal to tion can be improved.
the theoretical maximum yield, except for very small
maximum matching distances. The mean velocity error 6
stays constant at about 0.01 and the performance has a Tests with experimental data
value of 92±98. Also, one can see that the SRPIV results are
352
6.1
Experimental setup
Since the synthetic images indicated that the algorithm
performs in a satisfactory way, the next step is to test the
algorithm with experimentally obtained data. The algo-
rithm is tested on ¯ow phenomena occurring in the wake
behind a heated cylinder. The experimental conditions are
schematically displayed in Fig. 4.
For the experiments, a water tank facility is designed, in
which the heated cylinder (D 8.5 mm, L 495 mm) is
towed through the motionless tank rather than being
exposed to a forced main ¯ow. The speci®c dimensions of
the water tank are for length ´ width ´ height
500 ´ 50 ´ 75 cm. The main advantage of this device is a
minimal creation of boundary layers and an almost uni-
form in¯ow velocity distribution (Anagnostopoulos 1978).
A constant cylinder wall temperature difference was
maintained by an electric rod heater. The towing speed
was 8.9 ´ 10)3 m/s and the temperature difference of the
cylinder wall with the ambient ¯uid was kept constant at
5.8 K (with a controlled electric rod heater). This results in
Reynolds and Richardson numbers based on the cylinder
diameter of ReD 75 and RiD 1.3.
Hollow glass particles of sizes 10 and 20 lm are used as
seeding. These particles are illuminated with a 200-mJ
pulsed Nd:YAG laser. The recording is performed by using
an 8-bit digital camera with a 1008 ´ 1019 resolution for a
(6 ´ 10)2) ´ (6 ´ 10)2) m2 ®eld of view at 29 Hz (Kodak
ES1.0), resulting in a pulse separation of 1/29 s. The
camera is ®xed and the maximum in-plane displacement is
31% of the towing speed. The camera is directly coupled to
the data acquisition system. The laser is synchronized by
using the frame strobe of the camera as a master-signal.
The method, as described above, resulted in an image
sequence with relative low noise and well-detectable par-
ticle images. More details and experimental results are
given in Kieft (2000).
Fig. 3. Results for the SRPIV processing case, qs 1.0, maximum
matching distances in fractions of the entire image size of
512 pixels Fig. 4. De®nition of the mixed convection problem6.2 observed in Fig. 5. For almost all chosen qs, gex turns out
Tracking and algorithm parameters to be higher for the SRPIV results. For small qs, the dif-
In the present experiments, about 12,000 particles were ference is signi®cant. Remarkable is the fact that the curve
detected, which results in a constant rn equal to 4.6 camera which represents the SRPIV results does not show a
pixels. To get a good impression of the experimental maximum as can be seen in the PTV results, but increases
performance of the algorithm, it is suf®cient to vary the linearly with decreasing qs. The performance, presented
sampling quality and measure the corresponding perfor- here, is a combination of the total amount of velocity
mance. This sampling quality can either be changed by vectors found, expressed in the value of c and the quality
varying rn or Dsmax, according to Eq. 10. In the tests which of these vectors which is expressed in the standard devi-
are applied on the same sequence of acquired images, the ation of the vectors within a small sub-domain (ru,v). In
image quality, qs, is varied by skipping frames in the Figs. 6 and 7, these separate quantities are presented. As
353
acquired image sequence. For a frame skip equal to 0, the one can see, for the PTV results, c mainly increases as qs
subsequently grabbed camera frames are interrogated, decreases. This implies that for increasing frame skip,
while for a frame skip of k, only the k-th grabbed image is more vectors can be found. This can be attributed to the
analyzed. By doing so, Dsmax (the displacement of particles fact that the accuracy of the sub-pixel interpolation
between the images considered) increases and therefore qs becomes increasingly dominant. Therefore, the errors in
decreases. In Table 2, the applied frame skips are given the temporal extrapolation increase rapidly. Then, the
together with the corresponding sampling qualities present high seeding density results in lots of erroneous
(Eq. 10). matchings. This can also be observed in the increase of the
In the experimental case, the exact solution of the ¯ow local standard deviation. The quality of the PTV vectors
®eld is not available. Therefore, a more practical perfor- decreases rapidly for qs < 2 (increasing ru). For the
mance measure gex needed to be de®ned, smallest qs, this standard deviation is almost of the same
p order as the length of the velocity vectors.
c
gex ; 12
ru;v
where ru,v denotes the mean standard deviation of the u-
and v-component of the velocity vectors. This standard
deviation is calculated by dividing the ¯ow ®eld into Nm
monitoring areas in which the local standard deviation of
the ¯ow ®eld is calculated with respect to the average
velocity ®eld within this small area. By averaging this local
standard deviation over all monitoring areas, ru,v is cal-
culated. For all tests, it turned out that ru rv, therefore,
all further discussions are based on ru.
One should note that when Nm is taken too small (in
other words, the monitoring area is large), physical
velocity gradients will contribute to the mean average
standard deviation. On the other hand, by taking Nm too
large, the amount of vectors on which the standard devi-
ation in the interrogation area is evaluated becomes very
small. In the presented results, Nm is chosen to be 256 Fig. 5. Performance for the PTV and SRPIV tests as a function of
(16 ´ 16). As stated before, the physical velocity gradients the image quality qs based on the u-component of the vector
will contribute to the local standard deviation. However,
when there are no erroneous velocity vectors measured,
this standard deviation will be relatively low compared to
the situation in which there are more and more erroneous
velocity vectors. Therefore, the local standard deviation is
still a good qualitative measure of the errors. This holds
analogously for the experimental performance.
6.3
Experimental results
For the tests as presented here, the SRPIV results show a
better performance than the PTV results, as can be
Table 2. Applied frame skips with corresponding sampling
qualities qs
skip 0 1 2 3 4 5 8 17
qs 6 3 2 1.5 1.2 1 0.66 0.33 Fig. 6. Velocity yield c for the PTV and SRPIV tests as a function
of the image quality qsAnother approach to investigate the performance of the
algorithms is by means of a vector ®eld analysis. From the
vector ®elds as depicted in Figs. 8 and 9, the higher per-
formance of the SRPIV algorithm can be seen by visual
comparison. For qs 6, both vector ®elds (Figs. 8a and
9a) show no signi®cant difference. The stray vectors which
can be observed are mostly caused by the positional error
in the particle location, whose importance increases for
increasing qs (small displacements with respect to the
interparticle distance).
As qs decreases, ®rst the quality of the vector ®eld
354
improves. A further decreasing of qs results in a PTV
vector ®eld in which more stray vectors can be observed,
while for the SRPIV vector ®eld, the quality remains
constant or even improves (Figs. 8c and 9c). For the
Fig. 7. The ru for the PTV and SRPIV tests as a function of the smallest qs investigated, the PTV vector ®eld appears as a
image quality qs random ®eld of vectors, no coherent ¯uid ¯ow can be
detected. This means that no correlation can be found
between particles in subsequent frames. A closer inspec-
For the SRPIV results, c increases with an increase of tion shows a residual background of correct vectors, but it
sampling quality. However, the accuracy decreases more is overwhelmed by the majority of erroneous results. The
and, therefore, the performance shows a monotonic SRPIV results, on the other hand, still represents the ¯ow
decrease. This behaviour can be understood by consider- ®eld satisfactorily. Only in the areas of large velocity gra-
ing the particle location error, which becomes of minor dients, some regions occur where less vectors are found.
importance for large particle displacements (small qs). These regions were mainly caused by the low density of
Fig. 8a±d. PTV vector ®elds at t 5 s for different sampling qualities355
Fig. 9a±d. SRPIV vector ®elds at t 5 s for different sampling qualities
valid background velocity vectors. In the regions with dif®cult to track with high accuracy, the performance
large velocity gradients, the PIV correlation between im- could be increased from about 7 to 28 by using nearby
ages was lost for large frame skips (small qs), because there spatial and temporal information. In the case of SRPIV,
is no shear correction. Therefore, the invalid PIV-esti- where a PIV estimation is used to enhance the results, a
mated velocity vectors in these regions, as detected by the performance of approximately 98 is obtained and the
correlation peak height ratio, were discarded. In regions sensitivity to the tracking parameters becomes very low.
with large velocity gradients, the absence of a good ve- Moreover, the highest resolution is determined by the
locity estimate for predicting particle positions results in a lowest possible rn, provided that the fractional overlap Po
decay of the number of matches. is still small.
The experimental results presented here show that the
7 performance of the SRPIV algorithm turns out to be higher
Conclusions than that of the PTV algorithm, especially for image se-
In the present paper, a particle-tracking algorithm was quences where the particle displacements is larger than the
introduced, with a new straightforward matching proce- mean minimum interparticle distance (qs < 1). This cor-
dure, which turns out to be very ef®cient. It was used in responds largely with the results from tests with synthe-
combination with PIV to perform SRPIV. The algorithms sized image sequences.
were tested with synthetic and experimental data. However, in the tests with the synthesized data, the
The tests with synthetic images show that the PTV occurring error was dominated by erroneous matchings.
algorithm is fast and accurate and, for sampling quality In the experimental results, this error is a combination
values of 1 and larger, a good overall performance value is of the erroneous matching and the particle position
achieved. The results also indicate that for optimal per- error. Especially for large values of qs (very small dis-
formance, the algorithm parameter values should have the placements), the latter error turns out to be the most
following values: Drmax Dsmax, Dsmax < rn (or qs > 1), dominant one for both PTV and SRPIV. For very small
Nt 2 and D at any reasonable value. In most cases, particle displacements, this error can become of the
D rn is reasonable if a Gaussian window is applied. It same order as the length of the velocity vector. Here, it
was shown that for a sequence quality of 1, which is quite should be noted that the crucial parameter is then solelythe particle displacement relative to the particle position ization and image analysis. Kluwer, Dordrecht, The Nether-
error and not qs. lands, pp 27±54
For the SRPIV results, the accuracy of the obtained Dracos T; Malik NA (1992) 3D particle-tracking velocimetry ± Its
possibilities and limitations. In: Tanida Y, Miyashiro H (eds)
velocity vectors expressed in terms of a standard deviation Proc. 6th Int. Symposium on Flow Visualization, 1992,
of the vector ®eld, remains high (small ru,v). This means Springer, Berlin Heidelberg New York, pp 785±791
that although the fractional velocity yield of the SRPIV Guezennec YG; Brodkey RS; Trigui N; Kent JC (1994) Algorithms
results decreases, the validity of the found vectors is more for fully automated three-dimensional particle-tracking velo-
or less preserved. This is in contrast to the PTV algorithm, cimetry. Exp Fluids 17:209±219
where ru reaches a minimum at qs 3. For decreasing of Hassan YA; Canaan RE (1991) Full-®eld bubbly ¯ow velocity
qs, accuracy is lost fast due to random matching. measurements using a multiframe particle-tracking technique.
Exp Fluids 12:49±60
From the analyses of the vector ®eld it can be concluded
356 Keane RD; Adrian RJ; Zhang Y (1995) Super-resolution particle-
that the SRPIV algorithm performs optimally at qs 1, imaging velocimetry. Meas Sci Technol 6:754±768
which is a mean value over the entire ¯ow ®eld. This Khalighi B; Lee YH (1989) Particle-tracking velocimetry: an
difference in optimum performance with respect to the automated processing algorithm. Appl Opt 28:4328±4332
de®ned measure gex occurs due to the fact that in this Kieft RN (2000) Mixed convection behind a heated cylinder. PhD
de®nition the accuracy is weighted stronger than the thesis. TUE, Eindhoven, The Netherlands
spatial resolution (expressed in c). Furthermore, it turns Kieft RN; Rindt CCM; Steenhoven AA (1999) The wake behaviour
behind a heated horizontal cylinder. Exp Therm Fluid Sci
out that the quality of the background velocity is of crucial 19:183±193
importance to the performance of the SRPIV algorithm. Maas HG; Gruen A; Papantoniou D (1993) Particle-tracking
Missing vectors in this background velocity, due to velocimetry in three-dimensional ¯ows. Part 1: photogram-
ambiguous PIV correlations, cause a decrease of the ve- metric determination of particle coordinates. Exp Fluids
locity yield of the tracking results and therefore a decrease 15:133±146
in performance. Thus, in practice, the possibility to gen- Malik NA; Dracos T; Papantoniou D (1993) Particle-tracking
erate adequate background velocity vectors determines the velocimetry in three-dimensional ¯ows. Part II: particle track-
ing. Exp Fluids 15:279±294
lowest limit of qs for SRPIV. In this particular case, this Nishino K; Kasagi N; Hirata M (1989) Three-dimensional parti-
limit can be found somewhere around qs 0.5. Addi- cle-tracking velocimetry based on automated digital image
tionally, for large displacements resulting in very small qs, processing. ASME Trans J Fluids Eng 111:384±391
the out-of-plane particle loss increases. Then, a thicker Okamoto K; Hassan YA; Schmidl WD (1995) New tracking
light sheet is required. algorithm for particle image velocimetry. Exp Fluids 19:
An additional advantage of the SRPIV algorithm is the 342±347
possibility to obtain a qualitatively good vector ®eld from Pervez MS; Solomon TH (1994) Long-term tracking of neutrally
buoyant tracer particles in two-dimensional ¯uid ¯ows. Exp
just two images. This property makes it possible to per- Fluids 17:135±140
form particle tracking on two fast acquired images, as Press WH; Teukolsky SA; Vetterling WT; Flannery BP (1994)
obtained, for example, in measurements of high-speed Numerical recipes in C. The art of scienti®c computing, 2nd
turbulent ¯ows. The additional tracking then improves the edition, chapter 2.6. Cambridge University Press, Cambridge
spatial resolution considerably. Schreel KRAM; Plas GAJ van der; Kieft RN (2000) Accuracy of a
3D particle-tracking velocimetry method (CD-ROM paper 310).
References In: Grant I, Carlomagno GM (eds) Proceedings of the 9th
Adrian RJ (1991) Particle-imaging techniques for experimental International Symposium on Flow Visualisation, 2000, Edin-
¯uid mechanics. Ann Rev Fluid Mech 23:261±304 burgh, UK.
Anagnostopoulos E; Gerrard JH (1978) A towing tank with Wernet MP (1993) Fuzzy-logic particle-tracking velocimetry.
minimal background motion. J Phys E 9:951±954 Proc SPIE 2005:701±708
Bastiaans RJM (2000) Cross-correlation PIV: theory, implemen- Westerweel J (1993) Digital particle image velocimetry ± Theory
tation and accuracy. EUT Report 99-W-001. Eindhoven Uni- and application. PhD thesis. Delft University of Technology,
versity of Technology, Eindhoven, The Netherlands The Netherlands
Bastiaans RJM; Plas GAJ van der; Kieft RN (2001) The perfor- Westerweel J (1997) Fundamentals of digital particle image
mance of high-resolution particle velocimetry: algorithm, velocimetry. Meas Sci Technol 8:1379±1392
simulations and experiments. EUT Report 2001-W-001. Ein- Willert CE (1989) High-resolution correlation peak detection.
dhoven University of Technology, Eindhoven, The Netherlands Technical Report ECE 251 C. University of California at San
Bourgeois F; Lassalle JC (1971) An extension of the munkres Diego, La Jolla, Calif.
algorithm for the assignment problem to rectangular matrices. Winston W (1991) Operations research. Applications and algo-
Comm ACM 14(12):802±806 rithms, chap 7. Duxbury Press, Boston, Mass.
Cowen EA; Monismith SG (1997) A hybrid digital particle- Yagoh K; Ogawara K; Iida S (1993) The particle-tracking method
tracking velocimetry technique. Exp Fluids 22:199±211 using the Kalman ®lter. In: Nieuwstadt FTM (ed) Flow visual-
Dalziel SB (1993) Decay of rotating turbulence: some particle- ization and image analysis. Kluwer, Dordrecht, Netherlands,
tracking experiments. In: Nieuwstadt FTM (ed) Flow visual- pp838±842You can also read