Slip Estimation Model for Planetary Rover Using Gaussian Process Regression
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
applied
sciences
Article
Slip Estimation Model for Planetary Rover Using Gaussian
Process Regression
Tianyi Zhang 1, *, Song Peng 2 , Yang Jia 2 , Junkai Sun 1 , He Tian 1 and Chuliang Yan 1
1 School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130025, China;
sunjk20@mail.jlu.edu.cn (J.S.); tianhe18@mails.jlu.edu.cn (H.T.); ycljlu20@126.com (C.Y.)
2 Beijing Institute of Spacecraft System Engineering, China Academy of Space Technology,
Beijing 100094, China; pengsong20@163.com (S.P.); jiayangdoc@sohu.com (Y.J.)
* Correspondence: tyzhang18@mails.jlu.edu.cn
Abstract: Monitoring the rover slip is important; however, a certain level of estimation uncertainty
is inevitable. In this paper, we establish slip estimation models for China’s Mars rover, Zhurong,
using Gaussian process regression (GPR). The model was able to predict not only the average value
of the longitudinal (slip_x) and lateral slip (slip_y), but also the maximum possible value that slip_x
and slip_y could reach. The training data were collected on two simulated soils, TYII-2 and JLU
Mars-2, and the GA-BP algorithm was applied as a comparison. The analysis results demonstrated
that the soil type and dataset source had a direct impact on the applicability of the slip model on
Mars conditions. The properties of the Martian soil near the Zhurong landing site were closer to the
JLU Mars-2 simulated soil. The proposed GPR model had high estimation accuracy and estimation
potential in slip value, and a 95% confidence interval that the rover could reach during motion. This
work was part of a research effort aimed at ensuring the safety of Zhurong. The slip value may be
used in subsequent path tracking research, and the slip confidence interval will be able to help guide
path planning.
Citation: Zhang, T.; Peng, S.; Jia, Y.; Keywords: Mars rover Zhurong; longitudinal slip; lateral slip; Gaussian process regression; slip
Sun, J.; Tian, H.; Yan, C. Slip
uncertainty
Estimation Model for Planetary
Rover Using Gaussian Process
Regression. Appl. Sci. 2022, 12, 4789.
https://doi.org/10.3390/
1. Introduction
app12094789
In the field of planetary exploration, slip is one of the factors that can affect the safety of
Academic Editor: Manuel Armada
planetary rovers [1]. Slip is defined as the difference between the expected motion and the
Received: 3 April 2022 actual achieved motion [2]. Low slip can take the rover out of its planned path, which could
Accepted: 6 May 2022 cause the rover to collide with obstacles. High slip reflects a severe lack of traction, always
Published: 9 May 2022 accompanied by severe rover sinkage and even permanent immobility [3–5]. Almost all
rovers that have conducted detection missions on Mars or the Moon have encountered
Publisher’s Note: MDPI stays neutral
with regard to jurisdictional claims in
slip-related hazards of varying degrees [6–8]. In one case, the rover Spirit was permanently
published maps and institutional affil-
immobilized and was repurposed as a stationary science platform [9]. Therefore, it is
iations.
essential to monitor slip to ensure a rover’s safety.
According to information sources on sensors that predict slip, rover slip estimation
research can be divided into two approaches: exteroceptive-based and proprioceptive-
based [3]. Figure 1 displays common approaches used for rover slip estimation.
Copyright: © 2022 by the authors.
Licensee MDPI, Basel, Switzerland.
This article is an open access article
distributed under the terms and
conditions of the Creative Commons
Attribution (CC BY) license (https://
creativecommons.org/licenses/by/
4.0/).
Appl. Sci. 2022, 12, 4789. https://doi.org/10.3390/app12094789 https://www.mdpi.com/journal/applsci
. Sci. 2022, 12, x FOR PEER REVIEW
Appl. Sci. 2022, 12, 4789 2 of 19
Figure 1. Most common slip estimation approaches for rovers.
Figure 1. Most common slip estimation approaches for rovers.
(1) Exteroceptive-based approach
Exteroceptive sensors require input from the environment and the rover’s surround-
(1)
ings. Exteroceptive-based approach
The most widely used exteroceptive sensors are cameras. Cameras obtain image
information for slip estimation, which can be subdivided into slip estimation based on
Exteroceptive sensors require input from the environment and the
natural environment images and slip estimation based on wheel–ground images.
ings.SlipThe most widely
estimation used exteroceptive
based on natural environment images sensors
is usuallyare cameras.
realized by VisualCamer
Odometer (VO).
formation forThesliprover continuously which
estimation, obtains image
can data of the surrounding
be subdivided intoenviron-
slip estima
ment using cameras and calculates its own pose change according to the overlapping
ural environment
information images
of adjacent images. andthese
It uses sliptoestimation
obtain a motionbased estimationonand wheel–ground
then com-
bines Slip estimation based on natural environment images isused
that with wheel speed information to calculate the slip rate [10,11]. VO is widely usually
in planetary exploration, and has been used with the Mars rovers Spirit, Opportunity and
Odometer (VO).
Curiosity, as well as theThe
lunarrover continuously
rovers Tutu and Yutu-2. Thisobtains
method has image
high slipdata of the sur
estimation
ment using
accuracy, but it cameras and calculates
incurs high computational costs, its
and own pose
is limited change
for use according to t
in sparse-featured
areas and shadowed areas [12,13].
formation of adjacent images. It uses these to obtain a motion estimat
The slip estimation based on wheel–ground images judges the slip using image
bines that such
information, with wheel
as ruts speedDing
and wheels. information to calculate
et al. [14] proposed the slip
to use monocular rate [10
vision
to judge the wheel slip rate under ideal conditions without side deflection, based on the
used in planetary exploration, and has been used with the Mars rovers S
ruts’ spacing. Li et al. [15,16] established the diffuse analysis model of trace imprint by
and Curiosity,
analyzing as well
the formation as the
mechanism lunar
of the wheelrovers
imprint, Tutu and slip
and realized Yutu-2. This me
estimation
based on the time domain features of the wheel imprint
estimation accuracy, but it incurs high computational costs, and image. Li et al. [17] also proposed a is
high-brightness weak boundary rut extraction method to estimate wheel linear velocity and
sparse-featured
combined it with wheel areas and
angular shadowed
velocity (estimated areas [12,13].
by tracking the wheel marking points)
The the
to estimate slip estimation
wheel slip. Comparedbasedwith on wheel–ground
the natural environment-based images judges the sl
slip estimation
method, the slip estimation method based on wheel–ground images has better robustness;
formation, such as ruts and wheels. Ding et al. [14] proposed to use m
it overcomes the acquisition of surface feature points and the dependence on lighting
judge theAdditionally,
conditions. wheel sliptherate under ideal
computational conditions
cost is significantly without
reduced. siderelated
However, deflection
research focused on wheel slip rate estimations has been performed under ideal conditions,
spacing. Li et al. [15,16] established the diffuse analysis model of trace
e.g., no side deflection. These conditions do not conform to the complex situation of orbital
ing the formation
operation of a planetary mechanism
rover. of the wheel imprint, and realized slip e
the
(2) time domain features
Proprioceptive-based approach of the wheel imprint image. Li et al. [17] als
brightness weaksensors
Proprioceptive boundary rutsignals
only require extraction
from themethod
rover, withoutto estimate
depending on wheel
surrounding environment information.
combined it with wheel angular velocity (estimated by tracking the whe
The lunar rovers, Lunokhod-1 and Lunokhod-2, added a non-driving wheel that
tocould
estimate thedown
roll up and wheel
freelyslip.
at theCompared with
rear of the rover. the natural
The actual environment-ba
forward distance of the
lunar rover was measured by the number of revolutions of this
method, the slip estimation method based on wheel–ground images ha wheel. This was combined
with the number of revolutions to estimate the rover slip [18]. The Mars rover Curiosity
itdetermined
overcomes theitacquisition
whether was in danger of surfacebyfeature
of slipping comparing points and
its current the dependen
average to a
ditions. Additionally, the computational cost is significantly reduced
safety threshold [19]. These methods are not suitable for uneven surfaces.
With the rise of data analytics and machine learning, proprioceptive-based data-
research focused
driven approaches onbeen
have wheel
appliedslip rateslip
to rover estimations
estimation. Inhas thesebeen performed
methods, the
tions,
selectede.g.,
signalno side
data deflection.
and the correspondingThese conditions
slip observations do not
are used conform
as input to the co
and output,
respectively, and the model is trained through machine learning algorithms to obtain slip
orbital operation of a planetary rover.
(2) Proprioceptive-based approach
Proprioceptive sensors only require signals from the rover, with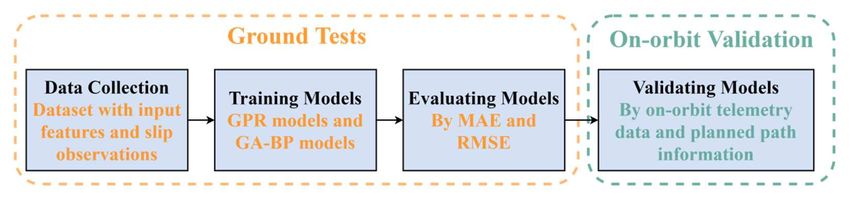
Appl. Sci. 2022, 12, 4789 3 of 19
estimation. Gonzalez et al. [5,19] used linear acceleration, vertical acceleration, and pitch
rate, measured by Inertial Measurement Unite (IMU), as input features, and realized the
slip level classification through various machine learning algorithms, such as Artificial
Neural Network (ANN), Support Vector Machines (SVM), Self-Organizing Mapping (SOM),
and so on. The Lunar All-Terrain Utility Vehicle (LATUV) rover was used to validate the
models, and a concrete-making factory and an abandoned mine were chosen to be test sites.
Dimastrogiovanni et al. [20] took driving torque, longitudinal force, and friction coefficient
as inputs, constructed a terrain classifier through SVM, and associated terrain types with
slip level labels. Sand types corresponded to high slip and rock types corresponded to low
slip. The research was tested using the rover SherpaTT, provided by German Research
Center for Artificial Intelligence, and the test site was an outdoor area in soft sand dunes in
Morocco. The proprioceptive-based data-driven approach is becoming a common trend
in slip estimation research, as it can adapt to complex environment and overcome the
dependence on images of the surrounding environment. However, few studies have taken
into account the differences in gravitational acceleration and soil conditions between Earth
and Mars or the Moon. The datasets used to train and validate these models were almost
all obtained on completely natural Earth terrain, which cannot guarantee applicability of
the trained models on Mars or the Moon.
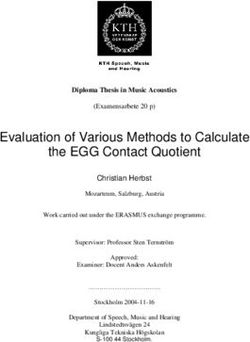
China’s first Mars rover Zhurong successfully landed on the southern Utopia Planitia
of Mars at 109.925◦ E, 25.066◦ N on 15 May 2021 [21]. Figure 2 shows the routing path of
Zhurong during the three-month-long designed life and the typical pictures returned by
Zhurong. After completing its primary exploration tasks, Zhurong continued to carry out an
extended expedition toward an ancient coastal area of Utopia Planitia. Inevitably, it would
have to pass through complex terrains with slip-prone areas in the exploration process.
The primary aim of our research was to establish a slip estimation model for the Mars
rover Zhurong. In our previous work [22,23], we used the Back Propagation neural network
(BP) and optimized BP based on a genetic algorithm (GA-BP) to train models, and GA-BP
models were proven to have good slip estimation performance by model evaluation and
validation. However, GA-BP models did not take uncertainty into consideration. As slip
estimation models are expected to provide the basis for slip-based path planning and path
tracking, obtaining uncertainty in slip estimation has significance for subsequent research.
This paper was a continuation of previous work; we established models able to estimate slip
values and confidence intervals, and further discussed models based on different soil types.
All data were collected in a test site equipped with a low-gravity simulation device and
simulated soil, such that we were able to simulate the conditions experienced by Zhurong
on Mars as closely as possible.
The rest of this paper has been organized as follows: in Section 2, we illustrated the
research framework of this paper. In Section 3, we introduced the data collection process of
ground tests. In Section 4, we introduced the training methods. In Section 5, we showed
the training results, obtained by ground tests, and the estimation results, compared to real
data on Mars conditions. In Section 6, we provided our conclusions.
The main contributions of this paper are as follows:
(1) Obtained a GPR slip estimation model, which can not only have high estimation
accuracy but also provides uncertainty of estimated values. The confidence interval
obtained by models can be used in subsequent robust path planning research.
(2) Compared models based on two kinds of simulated soil data, the results demonstrate
that the soil type and dataset source had a direct impact on the applicability of the
slip model on Mars conditions. In contrast, the JLU Mars-2 simulated soil are more
similar to the soil near the Zhurong landing site.
Zhurong during the three-month-long designed life and the typical pictu
Zhurong. After completing its primary exploration tasks, Zhurong contin
an extended expedition toward an ancient coastal area of Utopia Planit
Appl. Sci. 2022, 12, 4789
would have to pass through complex terrains with slip-prone4 ofareas
19
in
process.
Figure 2. The routing path of Zhurong during its designed life.
Figure 2. The routing path of Zhurong during its designed life.
2. Research Framework
The research framework of this paper is shown in Figure 3. In general, it was consistent
The primary aim of our research was to establish a slip estimation mo
with our previous paper [22]; however, the variables considered in the study and the
rover Zhurong.
machine In our
learning methods previous
used work
were different. The [22,23], we used
specific research the asBack
steps were Propaga
follows:
work (BP) test
(1) Collect and optimized
data BP based
from tests conducted onequipped
at a site a geneticwith aalgorithm (GA-BP) to tr
low-gravity simulation
device and simulated soil. In this paper, we collected data
GA-BP models were proven to have good slip estimation performance b on two kinds of simulated
soil, while our previous paper [22] only used the data collected on JLU Mars-2. As
tion and
such,validation. However,
we were able, in this work, toGA-BP
compare and models
discussdid not take
the influence uncertainty
of soil type on int
As slip
the estimation
applicability ofmodels are models.
slip estimation expected to provide the basis for slip-base
(2) Train slip estimation models with machine learning algorithms. In order to establish
slip estimation models, considering the slip uncertainty, we used Gaussian process
regression (GPR) to train models. GPR can predict not only slip values, but also
their confidence intervals. GA-BP has also been used to train models to compare the
performance of the two algorithms.
(3) Evaluate the trained GPR models and GA-BP models on ground test data. In this
paper, mean absolute error (MAE) and root mean square error (RMSE) were chosen
as evaluation indices to evaluate the performance of the models.
(4) Validate the trained models on telemetry data from Zhurong. We combined the path
planning information and slip estimation information to correct the planned path,
and then compared the end of the slip path with the actual final point.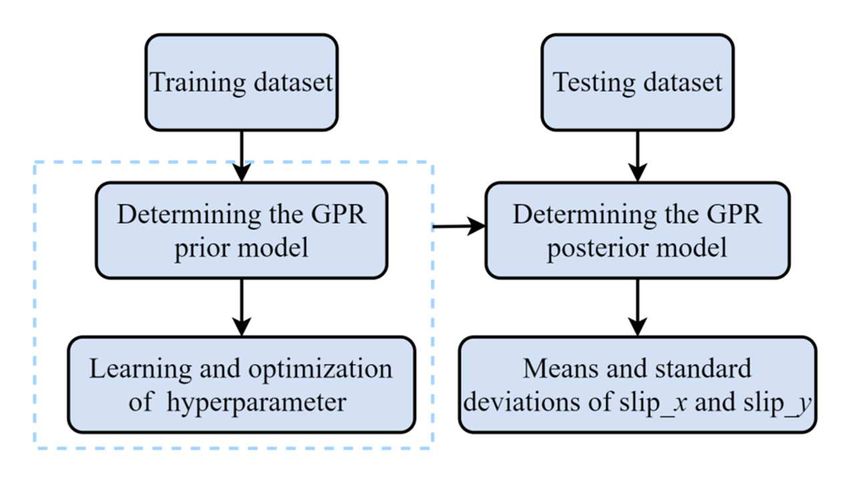
(3) Evaluate the trained GPR models and GA-BP models on ground test data. In this
paper, mean absolute error (MAE) and root mean square error (RMSE) were chosen
as evaluation indices to evaluate the performance of the models.
3. Data Collection (4) Validate the trained models on telemetry data from Zhurong. We combined the path
The
Appl. Sci. 2022, 12, planning
4789ground tests information
were performed in and slip estimation
an indoor information
test site at the Chineseto Academy
correct theofplanned
5 of 19 path,
Space Technology. The and dataset D = {(the
then compared x , send
i
n
) | of} the
i forslip
i =1
pathfeature
input with the actual x
vector final point.
with the
corresponding output, slip observation s , was collected to establish slip estimation mod-
els. In this section, we first introduce the ground testing site, and then detail the input
features and output observations used in our data collection.
Some descriptions have been simplified in this paper; more details are available in
our previous work [22].
3.1. Ground Tests’ Site
Figure 4a displays the indoor test site used for ground tests. The rover used in the
Figure
Figure 3. Research
3. Research framework.
framework.
tests was the validator of Zhurong; as such, its design and functions are essentially the
same as the Zhurong 3. Data
roverCollection
on Mars. The test sites were equipped with a low-gravity sim-
ulation device to provide The ground testsMartian
a simulated were performed in an indoor test
gravity environment forsite
theatrover.
the Chinese
The ver- Academy
of Space Technology. The dataset D = ( xi , si )|in=1 for input feature vector x with the
tical pressure of each wheel always stayed consistent with the values that the rover would
corresponding output, slip observation s, was collected to establish slip estimation models.
experience on Mars. In An indoorwe
this section, global positioning
first introduce system
the ground (iGPS)
testing site, was equipped
and then detail thefor dy-features
input
namic tracking andand measurement of the used
output observations position
in ourand
dataattitude
collection.of the rover; 4 laser trans-
mitters were arranged in the field, and a receiver was installed
Some descriptions have been simplified in thison the more
paper; rover, and are
details theavailable
meas- in our
previous work [22].
urement accuracy of position and attitude are better than 1 mm and 0.1°, respectively.
The tests site was covered
3.1. Ground with
Tests’ Sitethree kinds of simulated soil: TYII-2 simulated lunar
soil, JLU Mars-2 simulated FigureMartian soil,the
4a displays and JLU Mars-3
indoor simulated
test site used for groundsoil.tests.
As shown in Fig-
The rover used in the
ure 4b, the TYII-2 andtestsJLU
was Mars-2 wereoflaid
the validator in a horizontal
Zhurong; area, the
as such, its design andsimulated
functions are soil was the
essentially
naturally laid to formsamegentle
as theterrain
Zhurong undulations,
rover on Mars. andThethetest
slope
sitesvariation range with
were equipped was asmall
low-gravity
simulation device to provide a simulated Martian gravity
(0~5°). Research has demonstrated that the slope of most areas within 50 km of the Zhu- environment for the rover. The
vertical pressure of each wheel always stayed consistent with the values that the rover
rong landing area are below 5° [24]; the data collected in the horizontal area were used in
would experience on Mars. An indoor global positioning system (iGPS) was equipped
this paper. In addition, the JLUtracking
for dynamic Mars-3and data will be used
measurement to analyze
of the position andthe attitude
influence of slope
of the rover; 4 laser
on slip data in our subsequent work. Table 1 presents the mechanical parameters
transmitters were arranged in the field, and a receiver was installed on the ofrover,
TYII-and the
◦
2-simulated lunar soil and JLU accuracy
measurement Mars-2-simulated Martian
of position and attitudesoil [25,26].
are better than 1 mm and 0.1 , respectively.
(a) (b)
Figure 4. (a) The indoor test4.site
Figure of ground
(a) The tests;
indoor test site (b) the distribution
of ground tests; (b) theof simulated
distribution of soil.
simulated soil.
The tests site
Table 1. The mechanical parameters ofwas covered
TYII-2 withMars-2.
and JLU three kinds of simulated soil: TYII-2 simulated lunar
soil, JLU Mars-2 simulated Martian soil, and JLU Mars-3 simulated soil. As shown in
c (kPa) ϕ (o) K (m) ⋅ m -(n+1)
Figure 4b, the TYII-2 and JLU k cMars-2
kPawere laid in a khorizontal area,
was naturally laid to form gentle(terrain undulations, ) ϕ
( kPa
and
the simulated soil
⋅ m -(n+2) )
the slope variation
n
range was
◦ ). Research has demonstrated that the slope of most areas within 50 km of the
TYII-2 0.035 30.49
small (0~5 0.016 3.71 1.10 1.12
JLU Mars-2 Zhurong37.20
0.609 landing area are below 5◦ [24];
0.019 the data collected in983.36
15.69 the horizontal area1.02were used
c: cohesion; ϕ : internal friction angle; k: shear deformation modulus; k c : the cohesive modulus
in this paper. In addition, the JLU Mars-3 data will be used to analyze the influence of
of the soil; kϕ : the frictional modulus; n: slip-sinkage.
Appl. Sci. 2022, 12, 4789 6 of 19
slope on slip data in our subsequent work. Table 1 presents the mechanical parameters of
pl. Sci. 2022, 12, x FOR PEER REVIEW
TYII-2-simulated lunar soil and JLU Mars-2-simulated Martian soil [25,26].
Table 1. The mechanical parameters of TYII-2 and JLU Mars-2.
c (kPa) ϕ (◦ ) K (m) kc (kPa·m−(n+1) ) kϕ (kPa·m−(n+2) ) n
3.2. Input Features
TYII-2 0.035 30.49 0.016 3.71 1.10 1.12
Input features
JLU
0.609 were
37.20 expected
0.019 to reflect
15.69 the wheel–ground 983.36 interaction
1.02 s
Mars-2
available from sensors on Zhurong. Four features were selected to form the
c: cohesion; ϕ: internal friction angle; k: shear deformation modulus; k c : the cohesive modulus of the soil; k ϕ : the
vector:
frictional modulus; n: slip-sinkage.
3.2. Input Features
(1) The rover’s pitch, θ.
Input features were expected to reflect the wheel–ground interaction state and were
The from
available rover bodyonframe
sensors is shown
Zhurong. in Figure
Four features 5; as to
were selected shown,
form thethe XBfea-
input -axis and
to the ground, with the XB-axis pointing toward the driving directio
ture vector:
parallel
(1) along
axis The rover’s
the pitch,
wheel θ. axis. The ZB-axis was taken to be perpendicular to th
B-axis toand
the pointed to the
ground, with theXBground. θ represents
The rover body frame is shown in Figure 5; as shown, the XB -axis and YB -axis were
Yparallel -axis pointing toward the angle
the driving and the the X
directionbetween
rover body
YB -axis along frame and
the wheel axis.the
Thehorizontal plane,
ZB -axis was taken which
to be could to
perpendicular betheused to and
XB -axis character
YB -axis and pointed to the ground. θ represents the angle between the XB -axis of the rover
slope. There was a highly nonlinear relationship between slip and slope [
body frame and the horizontal plane, which could be used to characterize the terrain slope.
selected
There wasas one of
a highly the feature
nonlinear inputs.
relationship between slip and slope [27], so it was selected as
one of the feature inputs.
Figure 5. The body frame of Zhurong.
Figure 5. The body frame of Zhurong.
(2) The rover’s roll ϕ.
(2) The ϕ represents
rover’s angleϕbetween
theroll . the YB -axis of the rover body frame and the horizontal
plane. It was selected for different rolling states corresponding to different wheel force
ϕ represents
distributions, theslip
which affect angle between the YB-axis of the rover body frame and
behavior.
tal
(3)plane. It wascurrent
The average selected
of sixfor differentmotors
wheel-driving rollingI. states corresponding to differen
distributions, which
According to affect slip
the wheel–soil behavior.
theory, the slip value directly affects the wheel drive
torque T [28], so T can reflect the slip situation. Torque is known to be roughly proportional
(3) Thecurrent
to motor average
[29]; current
therefore, of sixwas
there wheel-driving motors Ibetween
also a mapping relationship . the wheel
drive motor current and the wheel slip. Since this paper focused on the rover slip, the
According to the wheel–soil theory, the slip value directly affects the
slip conditions of the six wheels needed to be comprehensively considered. Therefore, the
averageT
torque [28],ofsosixTwheel-driving
current can reflectmotors
the slip
I wassituation.
chosen as anTorque is known to be rou
input feature.
tional
(4) Theto average
motor angular
current [29]; wtherefore,
velocity there was
of six wheel-driving also
motors w. a mapping relationship
wheelConsidering
drive motor current
the nonideal and the
behavior wheel
of the motor slip.
in the Since this paper
actual operation focused
process, the on t
speed
the slipofconditions
the wheel wasofnotthe
exactly
six the same as
wheels the command
needed to bespeed. Fluctuating within
comprehensively a
considere
the average current of six wheel-driving motors I was chosen as an input
(4) The average angular velocity w of six wheel-driving motors w.
Appl. Sci. 2022, 12, 4789 7 of 19
certain range, wheel speed actually had some correspondence to wheel slip [30]. Therefore,
the average rotational speed of the six wheel-drive motors was chosen as one of the
input features.
3.3. Output Slip Observations
The slip of the rover is measured based on the rover body frame, as shown in Figure 5.
While the rover was driving on natural terrain, the slip could be broken down into lon-
gitudinal slip (slip_x), lateral slip (slip_y), and rotational slip (slip yaw) [31]. This paper
assumed that the slip yaw was trivial and could be canceled out by appropriate orientation
control [32]; we mainly focused on slip_x and slip_y of the rover, defined as follows:
slip_x = (vc − v x )/vc (1)
slip_y = vy /vc (2)
Appl. Sci. 2022, 12, x FOR PEER REVIEW 8 of 20
where vc is the expected velocity of rover, v x is the actual longitudinal velocity, and vy is
the lateral slip velocity of the rover (Figure 6).
ΔyB
vc
ΔxB n+1
vy v Δxc
n vx
Xc
Δyc
Yc
Figure 6. The velocity decomposition.
Figure 6. The velocity decomposition.
Slip cannot be directly observed. It needs to be calculated using position and attitude
3.4. Dataset from the rover in combination with wheel speed information. As shown in
information
Figure 6, time
Table n and time
2 displays then +raw
1 were
datathecollected
adjacent sampling
in ground moments. The slip
tests. Due to theobservations
sampling fre-
were calculated in the manner that follows.
quency of the rover’s position/attitude (20 Hz) having inconsistency with the sampling
frequency
(1) First, of wethe motorthecurrent/velocity
obtained rover’s position, (1 Hz),
( xC_n , yC_nthe current
, zC_n ) and (andxC_n+angular
1 , yC_n+1velocity
, zC_n+1 ) data
needed atto be interpolated
time of n and n + 1,by simple linear
respectively. interpolation.
Then, we calculated The thestep time distance
moving of the research
of the was
set to rover
0.05 sin[22].
the site
Oncoordinate
TYII-2 and system
JLU (Figure
Mars-2,6).approximately 7500 and 4600 data points
were obtained, respectively. The hold-out method was used to randomly split the ground
(∆xC , ∆yC , ∆zC ) = ( xC_n+1 − xC_n , yC_n+1 − yC_n , zC_n+1 − zC_n ) (3)
test data into the training set (66.7%) and testing set (33.3%). In this paper, each ground
type was usedbetonoted
It should obtain a (single
that ∆xC , ∆ytrained model. Therefore, we would like to compare
C , ∆zC ) was measured in the site coordinate system,
which
but the slip was measured based on the roverconditions,
model is more applicable to the Mars body frame,sosothat (∆xwe can
C , ∆y see
C , ∆z C )which
must be type of
simulated
convertedsoil is rover
to the more body
similar to the soil
coordinate in the
system (∆x B , ∆y B , ∆z
Zhurong landing
B ). areas.
(2) Next, we calculated the actual longitudinal velocity v x = ∆x B /∆t and lateral slip
Table 2. The data
velocity v collected
= ∆y /∆t in of
ground tests.It was known that the sampling frequency of the
the rover.
y B
rover’s position and attitude was about 20 Hz, so the time interval ∆t =Sampling
0.05 s.
Raw Data
Frequency
Rover’s pitch 20 Hz
Rover’s roll 20 Hz
Rover’s yaw 20 Hz
Current of each wheel driving motor 1 Hz
Angular velocity of each wheel driving motor 1 Hz
Position of rover 20 Hz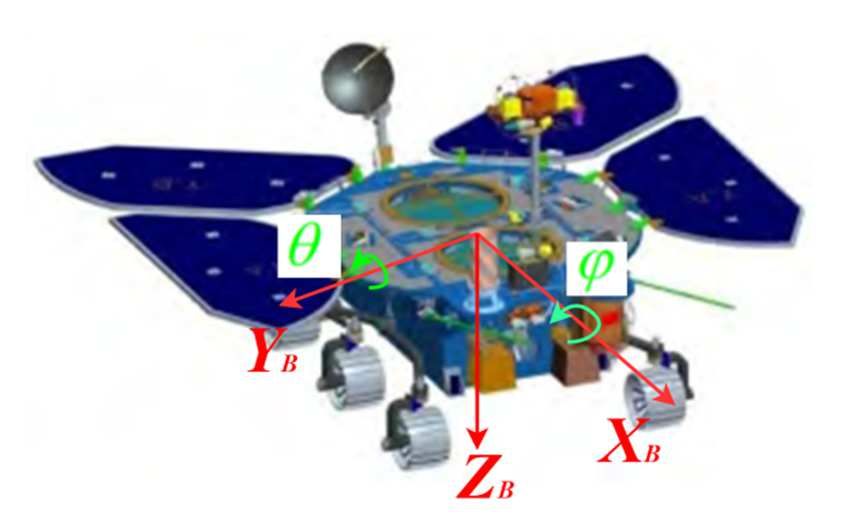
Appl. Sci. 2022, 12, 4789 8 of 19
(3) We calculated the expected velocity of the rover. Due to the small time interval, we
considered that the rover moved in a straight or near-straight path during the interval
time ∆t, and the expected velocity of the rover was defined as follows:
!
6
vc = ∑ ( wi r ) /(6∆t) (4)
i =1
(4) We calculated the slip_x and slip_y according to Equations (1) and (2), respectively.
3.4. Dataset
Table 2 displays the raw data collected in ground tests. Due to the sampling frequency
of the rover’s position/attitude (20 Hz) having inconsistency with the sampling frequency
of the motor current/velocity (1 Hz), the current and angular velocity data needed to
be interpolated by simple linear interpolation. The step time of the research was set to
0.05 s [22]. On TYII-2 and JLU Mars-2, approximately 7500 and 4600 data points were
obtained, respectively. The hold-out method was used to randomly split the ground test
data into the training set (66.7%) and testing set (33.3%). In this paper, each ground type
was used to obtain a single trained model. Therefore, we would like to compare which
model is more applicable to the Mars conditions, so that we can see which type of simulated
soil is more similar to the soil in the Zhurong landing areas.
Table 2. The data collected in ground tests.
Sampling
Raw Data
Frequency
Rover’s pitch 20 Hz
Rover’s roll 20 Hz
Rover’s yaw 20 Hz
Current of each wheel driving motor 1 Hz
Angular velocity of each wheel driving motor 1 Hz
Position of rover 20 Hz
4. Training Methods
Under the same input conditions, slip also has distribution uncertainty. For the safety
of the rover, it was critical to know not only the average value of the slip, but also the
maximum possible value that the slip could reach [33]. GPR is a nonparametric model
for regression analysis of data using the Gaussian process (GP) as a prior for Bayesian
inference. It exhibits strong adaptability and generalization ability. Furthermore, GPR
synthesizes both data and model uncertainty to estimate uncertainty [34,35]. Therefore,
GPR was used to train models in this paper. GA-BP, proposed in our previous work, was
also used to train models and compared with the performance of GPR, as fully detailed in
the literature [22].
GP is defined as a collection of random variables, any finite number of which have
consistent joint Gaussian distributions, and is fully specified by their mean function m(x)
and covariance function k(x, x0 ), where x and x0 are random variables [36]. Treat the
mean function m(x) as zero for the convenience of calculation, and there is no loss of
generalization.
f ( x ) ∼ GP(0, k( x, x 0 )) (5)
Generally, the data were episodically affected by noise from various sources; the
slippage observations can be represented as
s = f (x) + ε (6)
where f (·) is assumed as a zero-mean Gaussian process, is noise-dependent and follows
(0, σ2 ) distribution. f (·) is a nonlinear mapping relationship between inputs and outputs,
Appl. Sci. 2022, 12, 4789 9 of 19
and ε is noise. Assuming that they both fit zero-mean GP, then the prior distribution of
sample observations, s, also fit GP.
s ∼ GP(0, K + σn 2 In ) (7)
The joint prior distribution of the sample observations, s, and the predicted value s∗ is:
K + s2 I K∗ T
s
∼ N 0, (8)
s∗ K∗ K∗∗
where
k ( x1 , x1 ) k ( x1 , x2 ) ... k ( x1 , x n )
k ( x2 , x1 ) k ( x2 , x2 ) ... k ( x2 , x n )
K= (9)
.. .. .. ..
. . . .
k ( x n , x1 ) k ( x n , x2 ) ... k ( xn , xn )
K∗ = k ( x ∗ , x1 ) k ( x ∗ , x2 ) ... k ( x∗ , xn ) (10)
K∗∗ = k ( x∗ , x∗ ) (11)
1 0 ... 0
0 1 ... 0
In = . (12)
.. .. ..
..
. . .
0 0 0 1
where K is the covariance matrix for the training data, matrix elements k ij = k xi , x j are
used to measure the correlation between xi and x j , K∗∗ is the covariance matrix between
the test points (prediction) and the training data, K∗∗ is the covariance between the points
in the test set, and In is the identity matrix.
According to Bayesian formula
P ( s ∗ , s)
P ( s ∗ |s) = (13)
P (s)
We can obtain the posterior predictive distribution of s∗ at the location x∗ which is the
obtained predicted result by GPR.
−1 −1
P ( s∗ | s ) ∼ N ( K∗ ( K + σ2 I ) s, K∗∗ − K∗ (K + σ2 ) K∗ T (14)
Then
−1
m ( s∗ ) = K∗ ( K + σ2 I ) s (15)
−1
cov(s∗ ) = K∗∗ − K∗ (K + σ2 ) K∗ T (16)
where m(s∗ ) and cov(s∗ ) denote the prediction result and uncertainty, respectively.
GPR has several covariance functions, as shown in Table 1. The most commonly used
is the Squared Exponential (SE),
1 2
k x, x0 = σ f 2 exp(− 2 x − x0 )
(17)
2l
where σ f and l are hyper-parameters in need of identification, generally determined by
maximum likelihood estimation.
1 −1 1 n
L(θ ) = lg p(s x, θ ) = − s T (K + σn 2 In ) s − lg K + σn 2 In − lg 2π (18)
2 2 2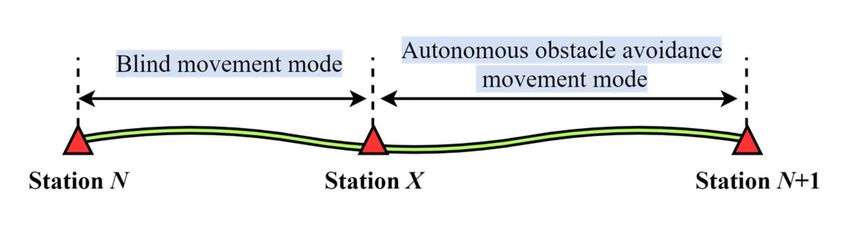
σ
where f
and l are hyper-parameters in need of identification, generally determined
1 1 9
by maximum likelihood estimation.
6(7) = 58 3 ( |2, 7) = − ( +) )* − 58 | + ) | − 58 2 :
2 2 2
(18)
;6(7) 1 ;( + ) )
= ((Appl. Sci. 2022, 12, 4789 11 of 19
2.65%, and a maximum difference of 0.13%. The MAE_x of the GPR models were between
0.29~4.35%, with an average of 1.94% and a maximum difference of 4.06%. Although GPR
models are unstable, the optimal performance of GPR models is beyond the reach of GA-BP
models. MAE_x = 0.29% signified that the estimated slip_x values closely approximated the
true values, which demonstrated the estimation potential of the GPR models. For lateral
slip, the performance results of slip_y were roughly similar to those of slip_x. In conclusion,
both GPR models and GA-BP models could complete the estimation with good accuracy.
The estimation performance of the GPR models was unstable compared to the GA-BP
models, but GPR models also demonstrated estimation potential, which GA-BP models
cannot reach.
Table 3. Estimation results of GA-BP and GPR on TYII-2 and JLU Mars-2 (slip_x).
TYII-2 JLU Mars-2
GA-BP GPR GA-BP GPR
Group
MAE RMSE MAE RMSE No MAE RMSE MAE RMSE
Number
(%) (%) (%) (%) (%) (%) (%) (%)
(1) 2.69 3.39 0.84 1.09 (1) 3.16 4.02 0.54 0.63
(2) 2.69 3.41 0.92 1.18 (2) 3.08 4.05 4.19 4.72
(3) 2.70 3.36 0.93 1.13 (3) 3.14 4.09 1.82 1.91
(4) 2.65 3.38 1.74 2.31 (4) 3.06 4.06 3.45 3.46
(5) 2.66 3.31 3.29 3.65 (5) 3.12 4.06 1.25 1.27
(6) 2.57 3.29 2.69 3.24 (6) 2.99 3.96 4.94 5.61
(7) 2.57 3.29 4.35 5.43 (7) 3.19 4.10 1.80 2.18
(8) 2.67 3.32 1.40 1.50 (8) 3.15 4.14 0.58 0.68
(9) 2.69 3.35 0.29 0.36 (9) 3.18 4.09 0.58 0.79
(10) 2.62 3.29 2.94 3.98 (10) 3.02 4.00 0.20 0.21
mean 2.65 3.34 1.94 2.39 mean 3.11 4.06 1.94 2.15
Table 4. Estimation results of GPR on TYII-2 and JLU Mars-2 (slip_y).
TYII-2 JLU Mars-2
GA-BP GPR GA-BP GPR
Group
MAE_y RMSE_y MAE_y RMSE_y No MAE_y RMSE_y MAE_y RMSE_y
Number
(%) (%) (%) (%) (%) (%) (%) (%)
(1) 1.15 1.50 0.57 0.73 1 1.150 1.577 0.86 0.87
(2) 1.16 1.51 1.91 2.16 2 1.184 1.523 3.38 3.46
(3) 1.15 1.47 1.97 2.50 3 1.127 1.487 1.50 1.95
(4) 1.14 1.48 4.25 5.00 4 1.190 1.537 0.84 0.85
(5) 1.16 1.53 1.80 2.41 5 1.117 1.450 5.40 6.97
(6) 1.16 1.51 1.36 1.36 6 1.131 1.474 3.39 3.41
(7) 1.16 1.51 3.21 4.22 7 1.058 1.414 3.18 3.60
(8) 1.15 1.48 3.84 4.25 8 1.194 1.529 7.48 9.89
(9) 1.15 1.50 0.89 1.19 9 1.115 1.470 3.36 4.71
(10) 1.21 1.54 1.66 1.77 10 1.131 1.522 0.15 0.19
mean 1.16 1.50 2.146 2.56 mean 1.140 1.498 2.95 3.59Appl.Appl. Sci. 2022,
Sci. 2022 , 12, x12,
FOR4789
PEER REVIEW 12 of12
19 of 20
(a) (b)
(c) (d)
Figure
Figure8.8.The
Theestimation resultsof of
estimation results fivefive
testtest groups
groups for slip_x
for slip_x using and
using GA-BP GA-BP
GPR:and GPR:
(a) the line(a) the line
charts
charts of MAE_x; (b) the box plots of MAE_x; (c) the line charts of RMSE_x; (d) the
of MAE_x; (b) the box plots of MAE_x; (c) the line charts of RMSE_x; (d) the line charts of RMSE_x.line charts of
RMSE_x.
To further explore the estimation effects of GPR models, Figure 10 displays part of the
GPR estimation results in the TYII-2 group (1) and JLU Mars-2 group (1). Since the test set
Table 4. Estimation results of GPR on TYII-2 and JLU Mars-2 (slip_y).
data were randomly selected, there was no continuous trend between adjacent training data.
In order to exhibit the results more clearly, Figure 10 only shows
TYII-2 the estimation of 100 data
JLU Mars-2
points to avoid excessively dense data points. The gray band area in the figure represents
GA-BP GPR GA-BP GPR
Group Num- the 95% confidence interval corresponding to the estimation result. As shown, no matter
MAE_y RMSE_y
what kind ofMAE_y
soil datasetRMSE_y No
utilized, and whetherMAE_y it was slip_xRMSE_y
or slip_y, theMAE_y RMSE_y
estimation results
ber
(%) (%) (%) (%) (%) (%) (%)
were consistent with the trends of actual values, and almost all real points were located (%)
(1) 1.15 1.50 the 95%
within 0.57
confidence0.73
interval, which 1 means 1.150GPR models1.577can provide
0.86a reasonable 0.87
(2) 1.16 estimation
1.51 of slip
1.91 value uncertainty.
2.16 2 1.184 1.523 3.38 3.46
(3) 1.15 1.47 1.97 2.50 3 1.127 1.487 1.50 1.95
(4) 1.14 1.48 4.25 5.00 4 1.190 1.537 0.84 0.85
(5) 1.16 1.53 1.80 2.41 5 1.117 1.450 5.40 6.97
(6) 1.16 1.51 1.36 1.36 6 1.131 1.474 3.39 3.41
(7) 1.16 1.51 3.21 4.22 7 1.058 1.414 3.18 3.60
(8) 1.15 1.48 3.84 4.25 8 1.194 1.529 7.48 9.89
(9) 1.15 1.50 0.89 1.19 9 1.115 1.470 3.36 4.71
(10) 1.21 1.54 1.66 1.77 10 1.131 1.522 0.15 0.19
mean 1.16 1.50 2.146 2.56 mean 1.140 1.498 2.95 3.59Appl. Sci.
Appl.2022, 12, 4789
Sci. 2022 , 12, x FOR PEER REVIEW 13 of 2013 of 19
(a) (b)
(c) (d)
Appl. Sci. 2022, 12, x FOR PEER REVIEW 14 of 20
Figure 9. The estimation results of five test groups for slip_y using GA-BP and GPR: (a) the line
Figure 9. The estimation results of five test groups for slip_y using GA-BP and GPR: (a) the line charts
charts of MAE_y; (b) the box plots of MAE_y; (c) the line charts of RMSE_y; (d) the line charts of
of MAE_y;
RMSE_y. (b) the box plots of MAE_y; (c) the line charts of RMSE_y; (d) the line charts of RMSE_y.
To further explore the estimation effects of GPR models, Figure 10 displays part of
the GPR estimation results in the TYII-2 group (1) and JLU Mars-2 group (1). Since the test
set data were randomly selected, there was no continuous trend between adjacent training
data. In order to exhibit the results more clearly, Figure 10 only shows the estimation of
100 data points to avoid excessively dense data points. The gray band area in the figure
represents the 95% confidence interval corresponding to the estimation result. As shown,
no matter what kind of soil dataset utilized, and whether it was slip_x or slip_y, the esti-
mation results were consistent with the trends of actual values, and almost all real points
were located within the 95% confidence interval, which means GPR models can provide
a reasonable estimation of slip value uncertainty.
(a) (b)
(c) (d)
Figure 10. GPR estimation results (in part): (a) slip_x on TYII−2; (b) slip_x on JLU Mars−2; (c) slip_y
Figure 10. GPR estimation results (in part): (a) slip_x on TYII−2; (b) slip_x on JLU Mars−2; (c) slip_y
on TYII−2; (d) slip_y on JLU Mars−2.
on TYII−2; (d) slip_y on JLU Mars−2.
6. Mars Condition Validation Results and Discussion
Zhurong operated in a highly efficient detection mode within its design life; the most
commonly used movement scheme is shown Figure 11. When Zhurong arrived at Station
N, its surrounding environment was imaged with navigation cameras located on the mast.(c) (d)
Figure 10. GPR estimation results (in part): (a) slip_x on TYII−2; (b) slip_x on JLU Mars−2; (
on TYII−2; (d) slip_y on JLU Mars−2.
Appl. Sci. 2022, 12, 4789 14 of 19
6. Mars Condition Validation Results and Discussion
Zhurong operated in a highly efficient detection mode within its design life; th
6. Mars Condition Validation Results and Discussion
commonly used movement scheme is shown Figure 11. When Zhurong arrived at
ZhurongN, operated in a highly
its surrounding efficient detection
environment mode with
was imaged within its design cameras
navigation life; the most
located on th
commonly used movement scheme is shown Figure 11. When Zhurong arrived at
Ground flight controllers performed visual positioning, target point selection (inte Station
N, its surrounding environment
ate transition was
Station Ximaged withStation
and target navigation cameras
N + 1), and path located on the(the
planning mast.
path from
Ground flight controllers performed visual positioning, target point selection (intermediate
N to Station X) according to images obtained at Station N. From station N to station
transition Station X and target Station N + 1), and path planning (the path from Station
rover drove in blind movement mode; that is, Zhurong drove completely accordin
N to Station X) according to images obtained at Station N. From station N to station X,
path planned by the ground controllers without autonomous obstacle avoidance
the rover drove in blind movement mode; that is, Zhurong drove completely according
while, visual positioning was performed at Station X to obtain the relative position
to the path planned by the ground controllers without autonomous obstacle avoidance.
tion Xpositioning
Meanwhile, visual N. From
to Station was stationatXStation
performed X to N
to station + 1, Zhurong
obtain drove
the relative in blind
position of auton
obstacle avoidance movement mode; that is, the rover autonomously
Station X to Station N. From station X to station N + 1, Zhurong drove in blind autonomous planned a
drive toward the target, Station N + 1. It should be noted
obstacle avoidance movement mode; that is, the rover autonomously planned a path to that the rover controlle
drive towardequipped
the target,with the N
Station slip estimation
+ 1. It should model
be notedat that
present, thus the
the rover actual is
controller rover
not arrival
equipped with reached
the slipwithout slip model
estimation compensation.
at present, thus the actual rover arrival point is
reached without slip compensation.
Figure 11. The Schematic diagram of Zhurong station.
From the above-described process, the ground cannot obtain real-time rover coordi-
nates when the rover is driving, thus it is impossible to directly verify the accuracy of the
slip estimation value during the driving process. However, we knew the planning path
and the actual end point/arrival after blind movement. In this paper, the predicted slip_x
and slip_y were converted into the longitudinal slip offset ∆x and the lateral offset ∆y,
respectively, and the planned path was corrected according to the longitudinal and lateral
offset values. Thus, we were able to obtain the slip estimation corrected path. The end
point of the slip-corrected path was compared with the actual points the rover reached
(accurate coordinates obtained by visual positioning) to evaluate the estimation effects of
the slip estimation models against the telemetry data. The required telemetry information
is shown in Table 5, and more details of the specific implementation steps are available
in [22]. It should be noted that the frequency of telemetry data for the rover’s attitude and
wheel driving motor is about 0.2~0.3 Hz, which is lower than the sampling frequency of
the ground tests. It means that it needs to use a estimated slip value to represent the mean
slip within 3 to 5 s, which may causes errors in slip offset calculations where the terrain
was extremely rugged. Since the terrain of the landing area of Zhurong is relatively flat, the
data of Zhurong does not change drastically when driving; we can consider this frequency
to be acceptable.
In this paper, validation was conducted based on data obtained from mid-June 2021
(sol.27–sol.40). Table 6 shows the planning path information and actual end points of
arrival. As shown, there was always an offset ∆L between the actual arrival point and
the planned target point. The ∆L varied from 0.267 m to 0.678 m, and the largest offset
occurred at sol.34. Due to the limited sample, there was no uniform linear relationship
between the ∆L of these five movements, the planned distance, and the planned curvature.
According to the planned path information shown in Table 6 and the models’ estimation
results, Figure 12 displays the slip-corrected path and planning path (left figure of each
subfigure). In order to quantify and compare the estimation accuracy of the GA-BP and
GPR models, the offsets, ∆L_GA-BP and ∆L_GPR, between the actual arrival point and
the planned target point, are summarized in Table 7. Figure 12 visualizes the offset results
of each movement (right figure of each subfigure); the points in all subfigures representAppl. Sci. 2022, 12, 4789 15 of 19
the linear deviation distance between the actual arrival point of the current move and the
planned path point, while the horizontal dotted lines in each subfigure represent the offset
∆L between the actual arrival point and the planned target point.
Table 5. Planning end points and actual end points of arrival.
No Required Information Usage Information Type
1 Planning path curvature
2 Planning path distance Ground planning
Draw planning path
3 Planning target point information
Rover’s yaw angle at start point
4
and target point
5 Rover’s pitch
6 Rover’s roll Input features of Telemetry
The current of each wheel models information
7
driving motor
The angular velocity of each wheel
8
driving motor
Judge the deviation Ground visual
9 Visual positioning of end point between predicted positioning
point and real point information
Table 6. Planning end points and actual end points of arrival.
Planning Planning Rover’s Yaw(o ) Planning Points Actual Points Deviation
Sol Curvature Distance Start Target X_Plan Y_Plan X_Actual Y_Actual ∆l
(1/m) (m) Point Point (m) (m) (m) (m) (m)
27 0.038 8.459 −135.508 −116.999 −4.9805 −6.7917 −4.9408 −7.1753 0.386
28 −0.071 9.196 −129.597 −167.031 −7.6869 −4.7449 −7.8924 −4.9153 0.267
34 −0.039 9.23 −162.377 176.774 −9.107 −1.1502 −9.7244 −1.4313 0.678
36 −0.0594 9.644 −106.654 −139.298 −5.1775 −7.9800 −5.5369 −8.3848 0.541
40 0.0096 9.516 171.782 177.010 −9.4670 0.9290 −10.0064 0.7707 0.562
Table 7. ∆L_GA-BP and ∆L_GPR.
TYII-2 JLU Mars-2
Sol
GA-BP GPR GA-BP GPR
∆L_GA-BP ∆L_GPR ∆L_GPR1 ∆L_GPR2 ∆L_GA-BP ∆L_GPR ∆L_GPR1 ∆L_GPR2
(m) (m) (m) (m) (m) (m) (m) (m)
27 0.434 0.420 0.426 0.851 0.120 0.044 0.472 0.551
28 0.312 0.241 0.739 0.896 0.222 0.144 0.688 0.880
34 0.633 0.141 1.269 1.549 0.240 0.084 1.217 1.380
36 0.548 0.165 0.938 1.267 0.302 0.143 0.518 0.700
40 1.129 0.133 0.531 0.712 0.242 0.075 0.653 0.731Appl. Sci. 2022, 12, x FOR PEER REVIEW 17 of 20
Appl. Sci. 2022, 12, 4789 16 of 19
(a)
(b)
(c)
(d)
Figure 12. Cont.Appl.
Appl. Sci.
Sci. , 1212,
2022,
2022 4789 PEER REVIEW
, x FOR 18 of1720of 19
(e)
PEER REVIEW 16 of 20 16 of 20
Figure 12. Planning path, predicted path, and deviation from sol.27–sol.36: (a) sol.27; (b) sol.28;
Appl. Sci. 2022 , 12, x12.
Figure FOR PEER REVIEW 16 o
Appl. Sci. 2022 ,,12
sol.34;Planning
(c)REVIEW path,
(d) sol.36; predicted path, and deviation from sol.27–sol.36: (a) sol.27; (b) sol.28; (c)
(e) sol.40.
Appl.
Appl.
Appl. Sci.
2022
Sci.Sci. 2022
, 12, ,12
2022 x12,x,xxFOR
,FOR FOR
FOR PEER
PEER
PEER REVIEW
REVIEW
PEER REVIEW
sol.34; (d) sol.36; (e) sol.40. 1616 16of
16
of of20
of
20 20
20
of pathplanned
was always
path,farther
and thethan
endthe endof
point and
pointpath
of was . represent the estimation
always farther than the points
end point of the
of GA-BP
. models based on TYII-2 and
IEW∆L_GA-BP
he (TYII-2) was 1.129 m,
Notably, on sol.40, ∆L = 0.562 m, 7.
whileConclusions
∆L_GA-BP
JLU
theMars-2
∆L_GA-BP of
datasets,
(TYII-2)respectively.
planned was 1.129
path, and Inthe
m, while16
allend ofpoint
20
subfigures,
∆L_GA-BP path was
of ofpath deviated
always thefarther
furthestthanfrom
the the
end point of
hich demonstrated
JLU Mars-2 that
wasthejust
GA-BP
0.242models established
m, planned
which
This demonstrated
paper
path,
planned
planned
planned
planned developed
and
path,
path,
path,
path, that
the
and
Notably,
andand
and the end
the
the
the the
slip
endonend
end GA-BP
estimation
point
endsol.40,
point of
point
pointof∆L
point models
of
of models
path
of=pathpath
0.562
path
path established
was
m,
was
wasfor
was
the
was the
always Mars
always
∆L_GA-BP
always
always
always rover
farther
farther
farther
farther
farther Zhurong
than
than
(TYII-2)
thanthan
than thethe
the
was
theend
end using
end
end
1.129
endpoint m,GPR
point
point
point
point of of
ofof. . .∆L_GA-B
while
of .
poorly inbased
comparison
on TYII-2 to the
dataothers. The
performed
and GPR
GA-BP.
Notably, models
poorly
Notably, in
Notably,
Notably,
on
Notably,The
oncomparison
onon
on JLU∆L
sol.40,
sol.40,
training
sol.40,
sol.40,
sol.40,∆L =to
∆L
Mars-2
=∆L
data
∆L the
===0.562
0.562
0.562 others.
0.562
was
0.562
came
m, m,
just
m, from
the
the
m, the ∆L_GA-BP
The
the
the GPR
∆L_GA-BP
0.242
ground
∆L_GA-BP
∆L_GA-BP models
m, which
∆L_GA-BP (TYII-2)
tests
(TYII-2)on
(TYII-2)
(TYII-2) two
was was
demonstrated
(TYII-2) was
was
was 1.129
simulated
1.129
1.129
1.129m,m,m,m,
that
m, while
while
soils,
whilewhile
while ∆L_GA-BP
∆L_GA-BP
the∆L_GA-BP
GA-BP
∆L_GA-BP
TYII
∆L_GA-BP models
and ofofof establis
of
howed
plannedthe same
based
path, onregularity.
and two
the end JLU JLU JLU
JLU
JLU
ofshowed
JLU
The slip-corrected
soil point
datasets
of also
path was Mars-2
Mars-2
Mars-2
Mars-2
Mars-2
Mars-2. was
Thesame
path
the
always was
datawas
based
was
wasjust
just
alsojust
just
just on
0.242
0.242
had
regularity.
farther than 0.242
TYII-2
0.242
0.242 m,
them,
higher
Them,
m,
m, which
data
which
which
which
which
end demonstrated
performed
demonstrated
demonstrated
demonstrated
demonstrated
accuracy
slip-corrected
point of and poorly
. samplingthat
path that
thatin
that
thatthethe
the the
the GA-BP
comparison
GA-BP
GA-BP
GA-BP
GA-BP
frequency. models
to models
models
models
models
models
The established
theestablished
others.
established
established
were The GPR mo
established
xhibited
Notably,better
based performance
on sol.40,
on the = 0.562
∆LJLU than
m, the
Mars-2 based
validated
path
∆L_GA-BP
dataset based
based
based
based
onon on
using
based on
on TYII-2
TYII-2
TYII-2
TYII-2TYII-2
Zhurong
on was
(TYII-2)
exhibited better data
data
based data
data
datadata
on performed
performed
performed
performed
performed
two
1.129 m, while
performance on poorly
Mars
soil
than ∆L_GA-BP
the poorly
poorly
poorly
poorly in
in
conditions,
datasets path in
in comparison
comparison
comparison
in comparison
comparison
also and
showed
ofbased on the to
tototo
to
the
the
results
the the
the
the
same others.
others.
others.
others.
others. The
demonstrated The
The
The
regularity. GPRGPR
GPR
GPR
GPR
Thethat models
models
models
models
models
the
slip-corrected p
ofJLU
the Mars-2
path
the waswasjust
TYII-2 closer
dataset.to the
0.242 m, actual
The which
end pointsoil
based
arrival based
type
demonstrated
of the and
based
based
basedon
point, on on
two
and two
dataset
on
on two
that
path two
two
soilsoil
the
was datasets
source
soil
soil
soil
datasets
based GA-BP
closeron thehad
datasets
datasets
datasets also
toalso
models
the aalso
JLU also
also showed
direct
showed
actual impact
showed
showed
showed
established
Mars-2 the
the
arrival
dataset same
the
the
the on
samesame
point, the
same
same regularity.
and
exhibited applicability
regularity.
regularity.
regularity.
regularity. better TheThe
The The
The slip-corrected
of the slipthan
slip-corrected
slip-corrected
slip-corrected
slip-corrected
performance model thepath
on path
path
path path based
based
ays onthe
within TYII-2
theactual data
95% performed
confidence Mars
poorly
interval.in
based
arrival point was always within the conditions.
comparison
based based
on
based
based
∆L_GPR1onthe on
on
onthe the
JLU
the
the The
JLUto JLU
JLU
JLU properties
the
Mars-2
the others.
Mars-2
TYII-2
Mars-2
Mars-2
Mars-2 dataset of
The
dataset
dataset.
dataset
dataset
dataset the
GPR Martian
models
exhibited
exhibited
The end
exhibited
exhibited
exhibited
95% confidence interval. ∆L_GPR1 point soil
better
better
better
better
better ofnear
the the
performance
performance
performance
performance
performance Zhurong
path thanwasthan
than
than
than the landing
the
closer
the
the to
path thesite
path
path
path were
based
based
actual
basedbased
based on on
on
arrival
on
on point,
point
baseddeviation
onand fromdatasets
two∆L_GPR2
soil therepresent
actualalsoarrival
showed most
pointthe similar
thethe
of
the TYII-2
the end-point the
the TYII-2
the
same to
TYII-2
TYII-2
TYII-2 95% the JLU
dataset.
dataset.
dataset.
dataset.
regularity.
dataset.
deviation from
theTheTheMars-2
The
The The
Theend
end
the
actual endend
end simulated
point point
point
point
slip-corrected
pointarrival
actual
arrival of of of
of
the the
the
the
thepoint
point soil.
was path
path
path This
path
path
path
of wasdemonstrated
was
was95%
the
always was
was closer
closer
closer
closer
closer
withinto to to
the to
to
the the
the the
the
actual
the actual necessity
actual
actual
actual arrival
arrival
arrival
arrival
95%arrival confidence of using
point,
point,
point,
point, and and
and
and
point,interval.
and ∆L_G
dicted
based by the
the GPR
onconfidence model.
JLU Mars-2 intervalTheboundary
datasetmaximum simulated
exhibited possible
predicted
the actual
the the
the
the
better Martian
point
by
actual
actual
actual the
arrival
actual
performance GPR
arrival soil
arrival
and
arrival
arrival for
model.
point ground
was
point
∆L_GPR2
pointpoint
point
than was
theThewas
was
was tests,
maximum
always
represent
always
always
always which
pathwithin
always within the
within
within
based has
possible
within the not
the
end-point
the
on the
the been
point 95% 95%not
deviation
95% 95%
95% considered
confidence
confidence
confidence from interval.
confidence
confidence the in
interval. the∆L_GPR1
interval.
actual
interval.
interval. existing
∆L_GPR1
∆L_GPR1
arrival
∆L_GPR1
∆L_GPR1 point of the
over 0.5 mthe
the TYII-2 away
rover
dataset. from
Thethe
could end real
reach arrival
was
point theliterature.
point.
ofalways and and∆L_GPR2
Comparing
over and
and
and
path The
0.5 ∆L_GPR2
∆L_GPR2
∆L_GPR2
was GPR
mcloser
∆L_GPR2away models
fromthe the
represent
confidence
represent
represent
represent
represent
to had
the
the
actualreal
the
the high
the arrival
interval estimation
end-point
end-point
end-point
end-point
end-point
arrival point.
boundary
point, accuracy,
Comparing
deviation
predicted
deviation
deviation
deviation
deviation
and from
from from
from
from and
by
the
the the
the
the the were
actual
GPR
actual
actual
actual
actual able
arrival
model.
arrival
arrival
arrival
arrival to show
point point
The
point
point
point the
of
of ofthe
ofmaximum
the slip
the
the95% 95%
95%
95%
95% possible p
model, basedthe on the same
GA-BP model soil
and dataset,
the behavior
GPR the GPR
model, of
confidence
confidence
confidence
confidence the
model
based
confidence rover.
interval on the
interval
the
interval
interval
interval These
same
rover models
boundary
boundary
boundary
boundary soil
boundary
could offered
dataset,
predicted
reach was
predicted
predicted
predicted
predicted the
by
by aby
by GPR
by
always
the
the 95%the
the
theGPR
GPR confidence
model
GPR
over
GPR
GPR model.
0.5
model.
model.
model.
model. m interval.
away
The The
The
The
The maximum
from
maximum
maximum
maximum
maximum Thus,
the real this
possible
possible arrival
possible
possible
possible work
point point
point.
point
point Compa
the actual arrival point was always within the 95% confidence interval. ∆L_GPR1
on effect. always
∆L_GA-BP of TYII-2
achieved a offered
wereestimation
better always
the the arover
larger
the
the
the
rover basic
effect. than
rover
rover
rover research
∆L_GA-BP
could
could could
could
could the
reach
reach direction
reach
reach
reach
wasof
GA-BP
was TYII-2
was
was
was always
always for
were
always
model
always
always subsequent
and
over
over always
over
over
over the
0.5
0.5 m
0.5
0.5
0.5
m m m slip-based
larger
GPR m
away away
away
away
away than
model,
from from
from
from
from path
based
the
the the
the
thereal planning
real
on
real
real
real arrival
the
arrival
arrival
arrival
arrival same and
point.point.
point.
point. path
point.
soil track- the GPR mo
Comparing
dataset,
Comparing
Comparing
Comparing
Comparing
and ∆L_GPR2 represent the end-point deviation from the actual arrival point of the 95%
t ∆L_GPRor ofroughly
JLU Mars-2 were smaller than
whileing. ∆L. The best
confidence interval equal
boundary to ∆L,predicted byThere
most
the ∆L_GPR
thethethe
the
GA-BP
the are
GA-BP
GPR GA-BP
GA-BP
GA-BP some
of
model JLU
model
model. modellimitations
modelMars-2
always
modeland
Theandandand
and
the were
the
maximum the
achieved
the
the
GPR ofGPR
GPR our
smaller
GPR
GPR work;
model,
model,
possible than
model,
a model,
better
model, only
∆L.
basedbased
estimation
based
based
based
point two
The
on
onon on
onthe
thekinds
best the
effect.
the
the same of
same
same
same
same simulated
∆L_GA-BP
soil soil
soil
soil
soil ofsoils
dataset,
dataset,
dataset,
dataset,
dataset, TYII-2
the the
the were
the
GPR GPR
were
GPR
GPR
GPR used
modelmodel
always larger t
model
model
model
the GPR model
estimationbased on
pointsJLU allMars-2;
appeared on
in sol.27,∆L_GPR
on
the
alwaysthe
test,GPR
always
always
always thus
always model
achieved it is
achieved
achieved
achieved
achieved based
hard
or
a a a a
betterato
roughlyon
better
better
better JLU
deeply
better equalMars-2;
explore
estimation
to
estimation
estimation
estimation
estimation ∆L,on sol.27,∆L_GPR
the
effect.
while
effect.
effect.
effect.
effect. correlation
∆L_GA-BP
most
∆L_GA-BP
∆L_GA-BP
∆L_GA-BP
∆L_GA-BP ∆L_GPR between
ofofof of
of ofTYII-2
TYII-2
TYII-2 JLU
TYII-2
TYII-2 soil
were properties
were
Mars-2
were
were
were always always
were
always
always
always and
larger
smaller
larger
larger
larger
larger slip
than than ∆L. The
than
than
than
the rover could reach was always over 0.5 m away from the real arrival point. Comparing
hat the predicted
even point was
reached 0.044 very
m, close to
meaning the
that
behavior. real
or the
or
or arrival
predicted
roughly
roughly
Moreover,
roughly equal equal
equal point
the
to to
estimation
to
∆L, was
∆L,
∆L,
training
while
∆L,dataset, very
while
points
while of
most close
most
all
most
the to
∆L_GPRthe
∆L_GPR
appeared
Gaussian
∆L_GPR
∆L_GPR real
of of
on
of
JLU arrival
JLU
the
JLU
process Mars-2
GPR
Mars-2
Mars-2 modelwere
were
regression
were smaller
based
smaller
smaller model on
than than
JLU
than
takes
∆L. ∆L.
Mars-2;
∆L.
Thea The
The
long
bestonbest
sol.27,∆L_G
best
the GA-BP model and the GPR model,or or
roughly
based roughly
on the equal equal
sametosoil to ∆L, while
while most most
the GPR ∆L_GPR model of JLU Mars-2 were smaller than ∆L. The
of JLU Mars-2 were smaller than ∆L. The best
point.
always achieved a better estimation effect. time, estimation
estimation
estimation
estimation
and
best∆L_GA-BP the
es-timation points points
points
algorithm even
points allallall
all appeared
reached
appeared
appeared
needs
points were
of TYII-2 appearedto
all appeared 0.044
beon onon
on m,
the the
the
theGPR
improved.
always larger GPR
on the GPR
meaning
GPR model
than model
model
model based based
the
based
based on onon
predicted
on
JLU JLU
JLU
JLU Mars-2;
GPR model based on JLU Mars-2; on sol.27, real arr
that point
Mars-2;
Mars-2;
Mars-2; was
on on on
on sol.27,∆L_GPR
very
sol.27,∆L_GPR close
sol.27,∆L_GPR
sol.27,∆L_GPR to the
blished based on In the data of the
conclusion, the JLU
model Mars-2 dataset
established
even even
even had
based
reached
reached
reached on the
0.044
point.
0.0440.044m, data
m,m, of the
meaning
meaning
meaning JLU
that Mars-2
that
that
the the
the dataset
predicted
predicted
predicted had
point point
point was was
wasvery very
very close close
close toto to
to
the the
the
real real
real arrival
arrival
or roughly equal to ∆L, while most ∆L_GPR ∆L_GPR even
of JLUeven reached
Mars-2 reached0.044
were 0.044m, meaning
smaller m,than meaningthat
∆L. Thethe predicted
thatbest the predicted point was
point very was close
very the
close realtoarrival
arrival
the real
tian environment
the best near Zhurong’s
adaptability to landing
the Martian
Author site,
point.
point.
point. which
environment
point.
Contributions: nearIn Zhurong’s
conclusion,
Conceptualization, landing
the
Y.J.model
and site,
T.Z.; which
established
software, based
S.P. on
and the
J.S.; data
data of the
curation, JLU Mars-2 dataset
H.T.
estimation points all appeared on the GPR model
arrival based on JLU Mars-2; on sol.27,∆L_GPR
point.
ian soil inmeans
this region
the m, may be more
properties similar to the simu-
even reached 0.044 meaningofthat the Martian
andpredicted
the J.S.; soil in
In
In this
writing—original
In In Inconclusion,
conclusion,
point
conclusion,
region
conclusion,
conclusion,
wasthevery
the
the
may
best the
the
draft
the model be
model
model
close
model
more
adaptability
model
preparation,
established
to similar
established
established
the
established realtoT.Z.;
established the to
based theonsimu-
based
Martian
based on
supervision,
based
arrival
based onon
onthe
the the
thedata
data
environment
the data
C.Y.
data
data ofofofofthe
of
All
the the
the
theJLU
JLU
near
JLU
authors
JLU
JLU Mars-2Mars-2
Zhurong’s
Mars-2
Mars-2
Mars-2
have dataset
dataset
read
dataset
dataset
dataset
and
had had site, wh
landing
had
had
had
model hadlatedhighsoil,
estimation
JLU accuracy
Mars-2. The and
GPR estimation
agreed model
the to
the
the the
the had
best best
best po- high
published
best estimation
adaptability
means
adaptability
adaptability
adaptability version the
to toto
the accuracy
ofproperties
to the
the
the Martian
Martian
Martian and
manuscript.
Martian of estimation
environment
the Martian
environment
environment
environment po-soil
near near
near
near in Zhurong’s
this
Zhurong’s region
Zhurong’s
Zhurong’s landing
may
landing
landing
landing be more
site, site,
site,
site, which
similar
whichwhich
which to the si
point. the best adaptability to the Martian environment near Zhurong’s landing site, which means
ed the maximum
tential, deviation
and at the that
same thetimerover could
offered meanstheachieve,
means
means
means maximum
the the
the
the deviation
properties
lated
properties
properties
properties soil,
of of of
of
the that
JLUthe
the
the the
Martian
Mars-2.
Martian
Martian
Martian rover
soilThe could
soil
soil
soil in GPR
in in
in
this achieve,
this
this
this modelregion
region
region
region had
may may
may
may high
be be
be
bemore more
estimation
more
more similar
similar
similar
similar to to
to to
accuracy
the the
the
thesimu- simu-
and
simu-
simu- estimation
In conclusion, the model established thebased
Funding: on the
This
properties data
research of the of the JLUnoMars-2
received
Martian external
soil in dataset
funding.
this had may be more similar to the simulated soil,
region
th planning.
the best which is veryto
adaptability useful for robust
the Martian path lated
environment planning.
lated
lated
lated
JLU Mars-2.
soil, soil,
soil,
soil, JLU
near JLU
The GPR
JLU
JLU Mars-2.
tential,
Mars-2.
Mars-2.
Mars-2.
Zhurong’s model
and
The The
The
The at
GPR GPR
the
GPR
GPR
landing
had high
same
model model
model
model
site, time
had had
had
had
which high high
offered
high
high estimation
the
estimation maximum
estimation
estimation accuracy
accuracy
accuracy
estimation accuracy and estimation potential, and at
deviation
accuracy and and
and
and estimation
that the rover
estimation
estimation
estimation po- po-
po-
po- could achi
Institutional tential,
tential,
tential,
tential, Review
and andand
and at at
the
at Board
at the
which
the
thesame
same Statement:
same
sameis very
time time
time
time useful
offered Notthe
offered
offered
offered applicable.
for the
robust
the
the maximum
maximum
maximum
maximum path deviation
planning.
deviation
deviation
deviation that that
that
that the the
the
therover rover
rover
rover could could
could
could achieve,
achieve,
achieve,
achieve,
means the properties of the Martian soilthe in same
this region time may be the
offered more similar todeviation
maximum the simu- that the rover could achieve, which is very
ual end points of 6.
Table arrival.
Planning end points and actual end
which
which pointsisisveryofuseful
very
very arrival.
useful
useful for
for robust
robust path
path planning.
planning.
lated soil, JLU Mars-2. The GPR model hadwhich
Informed which
high is
Consent very
is
estimation
useful for robust path
useful
Statement: forfor
accuracy robust
Notrobust
and pathpath
applicable. planning.
estimation planning. po-
Tableplanning.
6. Planning end points and actual end points of arrival.
tential,
anning
Planningand at theRover’s
Points sameActual
time
Yaw( offered
Points
o) the maximum
Data Deviation
Planning deviation
Points
Availability
that the
Statement: Actual
Not
rover could achieve,
Points
applicable. Deviation
Table
Table
Table 6. 6.
Table Planning
6.Planning
6. end
Planning
Planning end
end points
end points
points
points and actual
and
and
and actual
actual end
actual points
end
end
end ofof
points
points
points arrival.
ofarrival.
of arrival.
arrival.
which
lan isY_Plan
Distance very useful for robust
X_Actual Target path planning.
Y_Actual X_Plan
Planning ∆l Y_Plan
7. Conclusions Planning X_Actual Rover’sY_Actual
Yaw(o) Planning
∆l Points Actual Points Deviati
Start Point Acknowledgments: The authors oo)) are grateful
oo) o) to the Chinese Academy of Points
Space Technology for test
m) (m) (m) (m) Planning
Planning
Planning
Planning
Point Sol(m) Planning
Planning
Planning
Curvature
Planning
(m) This(m) paper Rover’s
Rover’s
Rover’s
Rover’s
Distance
(m) Yaw(Yaw(
Yaw(
Yaw(
developed (m) Planning
Planning
Planning
Planning
Target
(m) Points
Points
Points
Points
X_Plan
(m) Actual
Actual
Actual
Actual
Y_Plan Points
Points
Points
slip estimation models for the Mars rover Zhurong using GPRX_Actual Deviation
Deviation
Y_Actual
Deviation
Deviation ∆l
Table 6. PlanningSolend points and actual andpoints
end data supporting.
of arrival. Start Point
Sol
Sol Curvature
Sol−4.9408
805 8.459−6.7917−135.508 Curvature
Curvature
Curvature
−116.999 Distance
−7.1753 Distance
Distance
(1/m)
Distance
−4.9805
and 0.386−6.7917
GA-BP. Target
(m) training
The Target
Target
Target
−4.9408 data cameX_Plan
X_Plan
X_Plan
X_Plan
Point
−7.1753 Y_Plan
from ground Y_Plan
Y_Plan
Y_Plan X_Actual
X_Actual
X_Actual
(m)testsX_Actual
0.386 on (m) Y_Actual
Y_Actual
Y_Actual
Y_Actual
two simulated ∆l∆l
(m) soils, TYII∆l
∆l
(m) and (m)
Start
Start
Start
Start Point
Point
Point
Point
869 9.196−4.7449
ng −129.597
Rover’s Yaw( −7.8924
o) (1/m)(1/m)
(1/m)
(1/m)
−167.031 −4.9153
27
Planning (m) (m)
(m)
Conflicts
(m)
0.038
−7.6869
Points of
0.267Interest:
8.459
−4.7449 The
ActualPointPoint
authors
Point
Point
−135.508
−7.8924
Points (m)
declare (m)
no
(m)
(m)
−116.999
−4.9153 conflict
Deviation (m)
of(m)
(m)
(m) interest.
−4.9805
0.267
JLU Mars-2. The data also had higher accuracy and sampling frequency. The models were (m) (m)
(m)
(m)
−6.7917 (m) (m)
(m)
(m)
−4.9408 (m) (m)
(m)
(m)
−7.1753 0.386
107 9.23−1.1502−162.377
nce 272727
27
−9.7244
Target 0.0380.038
0.038
0.038
176.774 −1.4313
28 8.459
X_Plan 8.459
8.459
8.459
−0.071
−9.107 0.678
Y_Plan
validated −135.508
−135.508
−135.508
−135.508
9.196
−1.1502
X_Actual
using −116.999
−116.999
−116.999
−116.999
Zhurong data −4.9805
−129.597
−9.7244
Y_Actual −4.9805
−4.9805
on−4.9805
−167.031
−1.4313
Mars∆l −6.7917
−6.7917
−6.7917
−6.7917
−7.6869
0.678 and
conditions, −4.9408
−4.9408
−4.9408
−4.9408
−4.7449
the results −7.1753
−7.1753
−7.1753
−7.8924 0.386
−7.1753
demonstrated 0.386
0.386
0.386
−4.9153
that the 0.267
Start
775 9.644 Point 28 28
References
−7.9800 28
−5.5369 −0.071
−0.071
−0.071 −8.3848 9.196
9.196
9.196 0.541 −129.597
−129.597
−129.597 −167.031
−167.031
−167.031 −7.6869
−7.6869
−7.6869 −4.7449
−4.7449
−4.7449 −7.8924
−7.8924
−7.8924 −4.9153
−4.9153
−4.9153 0.267
0.267
0.267
28
−106.654
Point −0.071
−139.298 34
(m) 9.196
−0.039
−5.1775
soil (m) −129.597
9.23
−7.9800
type and dataset −167.031
−162.377
−5.5369
(m) source (m) −7.6869
176.774
−8.3848
had a direct −4.7449
−9.107
0.541 −7.8924
−1.1502 −4.9153
−9.7244
(m)impact on the applicability of the slip model on 0.267
−1.4313 0.678
9670 9.516
1.0.9290
−135.508 Tian, H.;
34 34
−10.0064
34
171.782Zhang,
34
−116.999 −0.039
T.; Jia,
−0.039
−0.039
−0.039
177.010 0.7707
Y.; Peng,
36
−4.9805 9.23 9.23
9.23
−0.0594
9.23
−9.4670
Mars 0.562
S.; Yan,
−6.7917 C.−162.377
Zhurong:
−162.377
−162.377 9.644
−162.377
0.9290
conditions. The
−4.9408 176.774
Features
176.774
176.774
−106.654
176.774
−10.0064
properties
−7.1753and−9.107−9.107
mission
−9.107
−139.298
−9.107
0.7707
of the of −1.1502
China’s
−1.1502
Martian
0.386 first
soil Mars
−1.1502
−5.1775
−1.1502
0.562 −9.7244
rover.
−9.7244
−9.7244
near −7.9800
−9.7244 −1.4313
Innovation
−1.4313
−1.4313
the Zhurong 2021, 2,
−5.5369
−1.4313landing0.6780.678
100121.
0.678
−8.3848
0.678
site were 0.541
6 −129.597 36 36
36
36
−167.031 −0.0594
−0.0594
−0.0594
−0.0594 40
−7.6869 9.6449.644
9.644
9.644 −106.654
−106.654
−106.654
−4.7449 −106.654
0.0096 −139.298
−139.298
−139.298
−7.8924 −139.298
9.516 −5.1775
−4.9153 −5.1775
171.782 −5.1775
−5.1775
177.010 −7.9800
−7.9800
−7.9800
0.267 −7.9800 −5.5369
−9.4670 −5.5369 −5.5369
−5.5369
0.9290 −8.3848
−8.3848
−8.3848
−8.3848
−10.0064 0.5410.541
0.541
0.541
0.7707 0.562
Table 7.40
−162.377 40 0.0096
∆L_GA-BP
40
40
176.774 and
0.0096
0.0096 ΔL_GPR.
0.0096
−9.107 9.516 −1.1502171.782
9.516
9.516
9.516 −9.7244177.010
171.782
171.782
171.782 −1.4313−9.4670
177.010
177.010
177.010 −9.4670
−9.4670
−9.4670 0.678 0.9290
0.9290 −10.0064
0.9290
0.9290 −10.0064 0.7707
−10.0064
−10.0064 0.7707
0.7707
0.7707 0.5620.562
0.562
0.562
4 −106.654 Table 7. −8.3848
∆L_GA-BP and0.541
ΔL_GPR.
TYII-2 −139.298 −5.1775
JLU Mars-2 −7.9800 −5.5369 JLU Mars-2
Table 7. 7.
Table
Table
Table ∆L_GA-BP
7.∆L_GA-BP
7. ∆L_GA-BP
∆L_GA-BPand ΔL_GPR.
and
and
and ΔL_GPR.
ΔL_GPR.
ΔL_GPR.
6 GA-BP
171.782 177.010
GPR −9.4670
GPR 0.9290
GA-BP −10.0064 TYII-2 0.7707 GPR 0.562 JLU Mars-2
SolYou can also read