Sample efficient localization and stage prediction with autoencoders - ESANN 2021
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
ESANN 2021 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence
and Machine Learning. Online event, 6-8 October 2021, i6doc.com publ., ISBN 978287587082-7.
Available from http://www.i6doc.com/en/.
Sample efficient localization and stage prediction
with autoencoders
Sebastian Hoch1 , Sascha Lange2 and Janis Keuper1
1- Offenburg University - Institute for Machine Learning and Analytics - Germany
2- PSIORI GmbH - Germany
Abstract. Engineering, construction and operation of complex machines
involves a wide range of complicated, simultaneous tasks, which poten-
tially could be automated. In this work, we focus on perception tasks in
such systems, investigating deep learning approaches for multi-task trans-
fer learning with limited training data.
We show an approach that takes advantage of a technical systems’ focus
on selected objects and their properties. We create focused representations
and simultaneously solve joint objectives in a system through multi-task
learning with convolutional autoencoders. The focused representations are
used as a starting point for the data-saving solution of the additional tasks.
The efficiency of this approach is demonstrated using images and tasks of
an autonomous circular crane with a grapple.
1 Introduction
The success of deep learning leads to broad use in industry and business. In our
daily work, we use machine learning for the automation of complex technical
systems, from single robots to full production lines. In this work, we will focus
on a wood-yard crane that is used for autonomous filling a paper mill. To oper-
ate entire plants or single machines automatically, tasks such as the perception
of the environment have to be performed. Usually, in industrial projects, the an-
notations have to be generated newly for each task. They, therefore, contribute
significantly to the project costs. In addition to annotation costs, rare events
make it challenging to generate an appropriate data set. In our environment,
for example, new logs are delivered by truck ten times a day. It is precisely
these rare events that are of particular interest for the automation of technical
systems. Technical systems are limited by the lack of data caused by the cost of
labeling and the challenges of covering all special cases. The focus of the tasks
on one object motivates us to use this information when solving the tasks. We
contend that the need for samples in solving tasks can be reduced by domain
knowledge, in our case the focus on the grapple. For this purpose, we have
combined finding a suitable representation with multi-task learning (MTL) [1]
in the version hard parameter sharing.
71ESANN 2021 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence
and Machine Learning. Online event, 6-8 October 2021, i6doc.com publ., ISBN 978287587082-7.
Available from http://www.i6doc.com/en/.
2 Stage prediction
Multi-task learning aims to pass on knowledge by learning some related tasks
simultaneously. In [2], the authors follow this pattern without deviations. Ref-
erence [3] supplements the model by cascading one task’s output as input to the
next task. The paper [4] aims to encode the network structure in a continu-
ous low-dimensional embedding space. Our approach is closest to the standard
shared trunk approach, with elements of [3] and [4].
We create representations with the help of the autoencoder approach [5]. An
autoencoder first compiles the input data into a low-dimensional space and then
reconstructs it from this representation. No labels are required; the process is
unsupervised. In the autoencoder environment, layer-wise pre-training is estab-
lished, as introduced by [6]. This approach became popular through the work
of [7] and [8].
In layer-wise pre-training, individual layers are trained with each other from the
outside to the inside. This leads to a good initialization of the weights of the
individual layers.
In our work, a layer-wise pre-trained autoencoder is combined with a classifier or
regressor. These models’ focus is on embedding spaces that allow solving more
tasks with a small amount of data. A transfer within a domain from one label
to another should take place. Our method is described in Fig 1.
3 Experiments and Results
We performed the experiments on a dataset which contains 5700 images, taken
from a circular crane pointing towards the grapple. The grapple is visible in
each image and has two different annotations. Due to the angle of the sun and
weather influences, the brightness fluctuates significantly. The first annotation
describes if the grapple is loaded. It is called ’grapple loaded?’, is a classification
task and is evaluated in our experiments with the metric accuracy. The second
annotation describes the position of the yellow tip in the image using the x and
y coordinates. We define a prediction for the keypoint yellow tip as correct if it
is within a radius of eight pixels of the truth. To get a clear score, the number
of correct predictions is divided by the number of all predictions (recall).
3.1 Experiments
In order to be able to evaluate our approach, we compare our results with a
representation-based approach and a standard deep neural network (ResNet50
[9]). Each experiment is performed eight times, the average and standard devi-
ation are presented as a result. For the evaluation, 10% of the data are used as
test data.
Since all images in our dataset are annotated for both tasks, it makes sense to
try our method in both directions. For this purpose, a focused autoencoder is
trained for each label. Afterward, the found encoder with its representation is
used for the transfer learning stage of the other label. The second stage of our
72ESANN 2021 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence
and Machine Learning. Online event, 6-8 October 2021, i6doc.com publ., ISBN 978287587082-7.
Available from http://www.i6doc.com/en/.
Stage 1 multi-task learning
Stage 2 transfer
autoencoder + focusing task
new task
s f
h o
a c
r u
e s
d e
n layer n layer d
e
n
c e
o n
d c
e t code layer
code layer o
r a
d
d s
e
e k
r
c
n
o
e
d s n layer
n layer n layer w
e p
r e
l
c
a
f
y
i output:
e
output 2: c new task
r
focusing task
s
l
a
y
e
r
s
Fig. 1: Approach: Stage 1: A layer-wise pre-trained autoencoder is extended
with a focusing task. The loss function, especially for the shared encoder, con-
sists of the weighted sum of the two individual losses. Stage 2: The encoder
(architecture + weights) of the multi-task learning model is extended with layers
for solving one other task in the domain.
method is trained with all data and with few (1500) data. Particular interest is
given to the performance that can be achieved with little data compared to the
other approaches.
The multi-task models are designed according to Section 2. As input, the im-
ages are resized from the size (1024,648,3) to the size (256,192,3). The Encoder
network consists of 12 convolution layers along with three fully connected layers.
The kernel size is always (3,3). Subsequent to the input layer, the first three
convolution layers have eight filters followed by two layers of 16 filters, three
layers of 32 filters and four layers with 64 filters. The hyperparameter stride is
set to two in layers 3, 5, 8, 10 and 12. In the other layers, the hyperparameter
strides is set to one. The activation of layers 3, 5, 8 and 10 is normalized by
batch normalization [10]. The fully connected layers have the sizes 512, 128 and
32. The code layer has seven neurons and is activated linearly. The decoder is
designed symmetrically to the encoder. Thereby convolutional layers have been
replaced by a transposed convolutional layer.
The focus criterion model used for the classification ’grapple loaded?’ consists
of three fully connected layers with 24, 8, and 1 neuron. Apart from the output
layer, the activation’s are adjusted using batch normalization. The key point
73ESANN 2021 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence
and Machine Learning. Online event, 6-8 October 2021, i6doc.com publ., ISBN 978287587082-7.
Available from http://www.i6doc.com/en/.
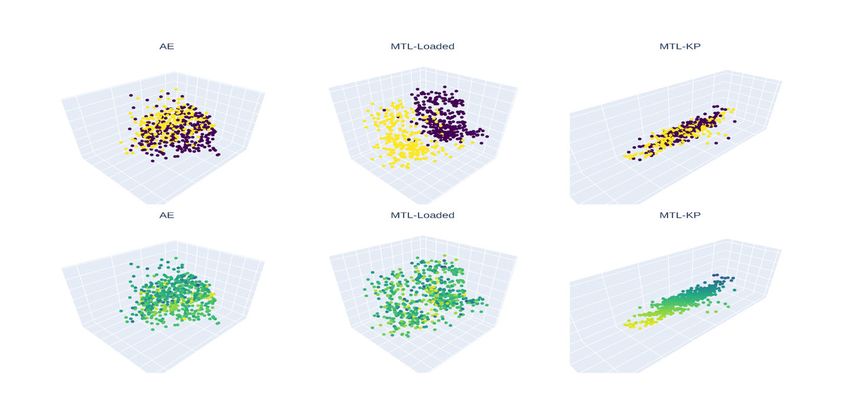
Fig. 2: Embeddings of the different models. The colored markings in the top row
correspond to the annotation ’grapple loaded?’ and in the bottom row to the
grapple’s y position. The MTL models show strong adaptation to their focusing
task, while the normal autoencoder shows no adaptation to the tasks.
detection yellow tip model differs from this model by having 32 neurons and
linear activation in the first layer.
The networks for the second stage consist of the trained and focused encoder.
To solve the actual task, the encoder is extended by the task-specific layers. The
same architecture as just described for the focusing part is used.
For comparison purposes, the tasks are learned using standard autoencoders and
subsequent transfer learning. In the results tables these results are simply titled
as autoencoder.
3.2 Embedding
To be able to evaluate an embedding, the instrument of visualization is applied.
For this purpose, the test data is encoded and provided with the corresponding
annotation. For ease of presentation, a principal component analysis is per-
formed on the coded data for three components. Fig. 2 shows the embeddings
of the three models marked with the two annotations. The autoencoder model,
like all other models, manages to encode the data points. No adaptation is made
to the grapple in the autoencoder model, nevertheless. The MTL models show
a clear adaptation to their focusing task. Since we emphasize the grapple, we
rate the encoding of the position higher than the separation by class.
3.3 Classification ’grapple loaded?’
The classification task ’grapple loaded?’ is well solved by all approaches. Table
1 lists the results for 5000 and 1500 data points for the different methods. With
74ESANN 2021 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence
and Machine Learning. Online event, 6-8 October 2021, i6doc.com publ., ISBN 978287587082-7.
Available from http://www.i6doc.com/en/.
Table 1: Model performance of the selected models (%), which are trained by
different data volume, for both tasks. The best result is highlighted in bold. For a
few data, the MTL and Transfer approach shows significantly better performance
than the other approaches.
data ResNet50 Autoencoder STAGE 1 MTL STAGE 2 Transfer
key point detection: yellow tip
5000 0.895 ±0.09 0.865 ±0.04 0.862 ±0.032 0.884 ±0.027
1500 0.19 ±0.178 0.522 ±0.153 - 0.568 ±0.212
classification: grapple loaded?
5000 0.931 ±0.02 0.902 ±0.013 0.901 ±0.025 0.933 ±0.01
1500 0.768 ±0.04 0.709 ±0.098 - 0.878 ±0.026
5000 images, all approaches are over 90% correct. The model which was pre-
trained with the keypoint yellow tip is the best. It achieves an accuracy of 93.3%,
closely followed by the ResNet50 with 93.1%. At 1500 images, our approach
achieves an accuracy of 87.8 %. This is significantly better than the second-
placed ResNet50 with a performance of 76.6%.
3.4 Keypoint detection ’yellow tip’
An examination of the results for the keypoint detection task reveals a similar
picture to the classification task. The presented method is best, especially when
there is little data. The experimental results are shown in table 1. At 1500
data points, the representation-based approaches are significantly better than
the ResNet50. Whereby the presented approach outperforms the autoencoder
approach by 4.6%. At 5000 data points, the ResNet50 delivers the best per-
formance, closely followed by our approach. As with the other task, the MTL
part of our approach delivers similar performance to the autoencoder-based ap-
proach. When all the results are considered together, it can be seen that the
method presented delivers better results than the other approaches, especially
when only a small amount of data is available. If more data is available, the
approach is competitive but does not always produce the best performance. The
comparison with a convolutional autoencoder shows that a suitable focus of the
embedding can be advantageous for subsequent tasks. It is also evident that dif-
ferent tasks solve this differently well. A task that shows a clearer relation to the
relevant region seems to be more suitable. The focusing task neither loses nor
gains from the MTL but is essential to the focus of the representation. Based on
the performance shown, the approach is particularly recommended when several
tasks with a common focus need to be solved. Costs can be saved due to the
reduced need for data. The standard neural network shows its strength with
many data and through its lower training effort.
75ESANN 2021 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence
and Machine Learning. Online event, 6-8 October 2021, i6doc.com publ., ISBN 978287587082-7.
Available from http://www.i6doc.com/en/.
4 Conclusions
This paper has presented our first approach towards focused representations for
the solution of multi-task recognition problems in a data-efficient manner. The
approach modifies autoencoder by a shared encoder and a focusing task. Simul-
taneous training of the autoencoder and arbitrary related tasks allows to focus
the autoencoders prediction capabilities onto relevant regions in images. These
representations are used to solve further tasks of a technical system in a data-
saving way.
To demonstrate this method’s performance, the approach was compared with a
standard deep neural network and a representation-based approach on an indus-
try dataset. Compared to a classical autoencoder, the found representations are
focused on regions of interest.
We recommend that future work be directed in particular to improving repre-
sentation search. For this purpose, the effect of additional parallel tasks can be
investigated and different strategies for the loss function can be analyzed.
The performance of the proposed approach was demonstrated using a real-world
dataset. We believe that such data-efficient approaches can significantly reduce
annotation costs, especially in industrial projects.
References
[1] Rich Caruana. Multitask learning. In Sebastian Thrun and Lorien Pratt, editors, Learning
to Learn, pages 95–133. Springer US, Boston, MA, 1998.
[2] Zhanpeng Zhang, Ping Luo, Chen Change Loy, and Xiaoou Tang. Facial landmark de-
tection by deep multi-task learning. In David Fleet, Tomas Pajdla, Bernt Schiele, and
Tinne Tuytelaars, editors, Computer Vision – ECCV 2014, pages 94–108, Cham, 2014.
Springer International Publishing.
[3] Jifeng Dai, Kaiming He, and Jian Sun. Instance-aware semantic segmentation via multi-
task network cascades, 2015.
[4] Shanfeng Wang, Qixiang Wang, and Maoguo Gong. Multi-task learning based network
embedding. Frontiers in Neuroscience, 13, 01 2020.
[5] D. E. Rumelhart and J. L. McClelland. Learning internal representations by error prop-
agation. In Parallel Distributed Processing: Explorations in the Microstructure of Cog-
nition: Foundations, pages 318–362. 1987.
[6] D. Ballard. Modular learning in neural networks. In AAAI, 1987.
[7] G. E. Hinton and R. R. Salakhutdinov. Reducing the dimensionality of data with neural
networks. Science (New York, N.Y.), 313:504–507, 2006.
[8] Y. Bengio, Pascal Lamblin, Dan Popovici, and Hugo Larochelle. Greedy layer-wise train-
ing of deep networks. Adv. Neural Inf. Process. Syst., 19:153–160, 01 2007.
[9] Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for
image recognition, 2015.
[10] Sergey Ioffe and Christian Szegedy. Batch normalization: Accelerating deep network
training by reducing internal covariate shift, 2015.
76You can also read