Powder Press Automation 2018 - RHA Systems RAG 2 Systems PAG 30 Systems Accessories 3Generation 3 - Roboworker
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Powder Press Automation 2018
RHA Systems
RAG 2 Systems
PAG 30 Systems
Accessories
3
Generation 3
Technology
inside
ROBOWORKER – Your Partner for Innovative Automation and Inspection Technology
The ROBOWORKER Team
Contents
Machines
RHA Systems 6
RAG 2 Systems 8
PAG 30 Systems 10
Software 12
Processing of Trays
Stacker systems 14
Magazine systems 15
Conveyor belt systems 16
Accessories
Tray Handling 18
Gripping Technology 20
Punch Cleaning 28
De-burring Functions 30
Assistance Systems for Quality Assurance 32
Service 35
Overview of Article Numbers 36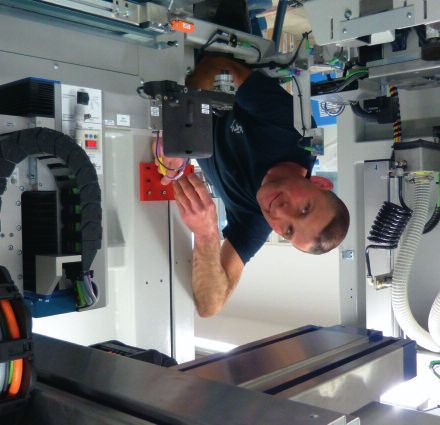
ROBOWORKER – The Specialist for Innovative
Automation and Inspection Technology
We are an expanding international company from the Lake Constance
area, specializing in the development and supply of top quality, innova-
tive automation and inspection systems.
We mainly concentrate on the processing of high precision components,
such as powder pressed parts or sintered components made of carbide,
iron powder, ceramics and special material.
For more than 25 years we have been offering tried and tested systems
meeting nearly all of our customers’ requirements. We focus on press
unloading systems, systems for green machining and inspection of cut-
ting inserts. Re-palletizing and packaging lines for cutting inserts and
handling systems for machine tools complete our portfolio.
ROBOWORKER systems are notable not only due to their fast cycle times
and high number of processable parts but also due to their modular
design. ROBOWORKER delivers systems ready for operation for custo-
mized applications. Depending on the customers’ needs we also supply
our own applications which can be expanded with optional accessories.
A sophisticated control system with configurable application software,
made by ROBOWORKER, provides a simple and comfortable operation
and guarantees user-friendly maintenance.
Our technicians and service team serve our customers with professional
advice and guidance concerning hotline, need for spare parts, trainings
and maintenance.
ROBOWORKER portfolio
Press automation, drilling, de-burring,
automation for grinding/lapping
machines, automation for blasting ma-
chines, re-palletizing, inspecting, laser
marking, lidding, labeling
ROBOWORKER Automation GmbH,
facilities in Weingarten
3
ROBOWORKER – Your Partner for Innovative Automation and Inspection Technology
Powder Press Automation Systems
ROBOWORKER has been successfully working in the field of powder press
3
Generation automation since the early 90s. Our latest Generation 3 technology pro-
vides even more flexible and efficient systems for all kinds of pressed parts.
Today we are able to offer automation solutions for
Carbide parts, cutting inserts
and wear parts • Mechanical, hydraulic and electric presses with withdrawal
or ejection principle
• Single plate presses up to multi-axes presses
• Presses with pressing forces from 4 t to 200 t
Technical and dental ceramics
and special materials
Automotive
RHA RAG 2
4 at 16 t electric press at 25 t hydraulic press
The most important features of our
press automation systems at a glance:
High productivity
through fast and precise high performance linear robots
for the handling of pressed parts
Process reliability
due to perfect synchronization and rapid data exchange
between press and automation system
Maximum freedom
in the automation process with easy-to-use operator interfaces
• Flexible programming of ROBOWORKER’s, or customer owned, grippers
• Creation of contours in the punch cleaning process
• Choice of different de-burring methods
Reduction of green scrap
due to suitable and gentle gripping technology
Quality assurance
through a variety of optional functions, such as de-burring, weighing,
punch cleaning, image processing and height measurement
Optimal furnace loading
with freely programmable high density part placing pattern
Our sales team would be pleased to consult you regarding your needs
and to answer your individual questions.
PAG 30 ND PAG 30
at 10 t electric press at 6 t mechanical press 5
Machines – RHA Systems
RHA Systems –
The Latest Generation High-precision,
Ultra-fast High-end Systems
With the latest generation of press removal systems ROBOWORKER has
once again increased the precision, speed, functionalities and flexibility
3
Generation
of the robot system with the new RL 35/4. Whereas in the RAG and PAG
systems the robot system is mounted on the housing, this new robot is
fixed to a mineral cast column construction.
RHA system
6 with closed housing
Features of the Basic Machine
• Mineral cast column construction with 4-axis linear robot system
RL 35/4, optional addition of 5th/6th axes in gripper
• Optimized use of ROBOWORKER grippers (as a standard also multi-
axis gripper) and customer owned gripping systems
• Two gripper stations for automatic gripper exchange
• Ultra-precise part placing on all kinds of sinter trays including tray
measurement
• Closed housing in stand-alone version
- Dimensions/design available in customized variants
- Containment
• Freely adjustable and highly user-friendly 19” touch screen,
plus mobile handheld terminal for teach-in
Column construction with RL 35/4 • Freely accessible switch cabinet in the column’s rear side with
safety and data relevant interface with the press
Extendable by:
• Processing any kind of sinter tray with
- stacker systems (transport trolleys, roller conveyors, lifting systems,
magazine trolleys)
- magazine systems
- single or double conveyor belt systems
• Adding ROBOWORKER stations (e. g. weighing)
• Adding stations supplied by the customer (e. g. air box)
Robot System RL 35/4
• Kinematics of the axes optimized for horizontal unloading processes,
Clearly arranged mask for input different axe lengths available
of machine parameters on touch screen • High dynamics and precision of all axes due to servo synchronous
motors with toothed belt drive (X) and ball screw drive (Y, Z1, Z2)
• As a standard with direct measuring systems on X, Y and Z1 axes
• All axes with precision linear drives, dust protected, vibration-free
• Shortest cycle times through intelligent interconnection of both Z axes
• Gripper exchange system 3.0 with electric interface extension
and once again improved exchange precision
- Connecting of complete ROBOWORKER gripper range
Technical Data
Robot system RL 35/4 linear robot: 4 Cartesian axes XYZ1Z2; 5th/6th axes
generated by motoric functions in the gripper (capable to be
synchronized with XYZ movements of the robot)
Repeating positioning accuracy +/- 0,02 mm
Quick set-up of part placing pattern Sinter trays max. size: 500 x 450 mm
max. allocation area: 490 x 420 mm
via touch screen Pick cycle up to 50 strokes/min. (without weighing)
up to 25 strokes/min. (weighing of each part)
Operating system Windows 7
Control system Beckhoff
Electrical connection 3 x 400 V, 50 Hz, 32 A
UL standards available: e. g. 3 x 480 V, 60 Hz, 32 A
Compressed air connection/ min. 0.5 – max. 1.0 MPa, dry, oil-free acc. to ISO8573-1 class 1-2-1/
Consumption dependent on grippers and devices
Subject to technical modifications and errors
Machines – RAG 2 Systems
RAG 2 Systems –
Flexible and Efficient Automation Systems
The RAG 2 automation systems for the lateral unloading of presses are
an ideal solution when a large number of sinter trays must be stored and
automatically processed. All systems are equipped with an RL 30/3 BG1
robot system which is mounted on the machine housing. Due to system
speeds of up to 35 strokes/min high production rates are achieved even
adding functions such as weighing or de-burring.
RAG 2
8 with magazine system
Features of the Basic Machine
• Solid machine frame in welded construction, powder-painted
• 3-axis linear robot system RL 30/3 BG1, 4th axis in gripper
(4th/5th axes also optional)
Easy programming of additional • Optimized use of ROBOWORKER grippers and customer owned
stations via handheld terminal gripping systems
• Two gripper stations for automatic gripper exchange
• Precise part placing on all kinds of sinter trays
including tray measurement
• Mobile handheld terminal (19” touch screen as an option)
• Complete case, safety doors, acryl glass windows with optimized access
• Integrated switch cabinet with safety and data relevant interface
with the press
Extendable by:
• Processing of any kind of sinter tray with
- magazine systems
- stacker systems (transport trolleys, magazine trolleys)
• Adding additional stations supplied by the customer as slide-in
module or fixed installation by placing RAG 2 at a pre-determined
distance from the press
Robot System RL 30/3
• Designed for fast and precise unloading processes
Robot system in RAG 2 in different sizes (BG1/BG2)
• Powerful AC drives with low-play planetary gears (X)
and ball screw spindles (Y, Z)
• All axes with high-performance guides, dust-protected
• Short cycle times due to high inherent and torsional rigidity
• Precision gripper exchange system 2.0
(3.0 as an option for RAG 2 Systems)
- Connection of complete ROBOWORKER gripper range
- 3D levelling for optimal alignment of the interface with the press tool
• Maintenance friendly design
Technical Data
Robot system RL 30/3 BG1 linear robot: 3 Cartesian axes XYZ; 4th axis
generated by motoric functions in the gripper (capable to be
synchronized with XYZ movements of the robot)
Repeating positioning accuracy +/- 0.05 mm
Sinter trays max. size: 500 x 450 mm
max. allocation area: 490 x 420 mm
Pick cycle up to 35 strokes/min. (without weighing)
up to 23 strokes/min. (weighing of each part)
Operating system Windows 7
Control system Beckhoff
Electrical connection 3 x 400 V, 50 Hz, 32 A
UL standards available: e. g. 3 x 480 V, 60 Hz, 32 A
Compressed air connection/ min. 0.5 – max. 1.0 MPa, dry, oil-free acc. to ISO8573-1 class 1-2-1/
Design Z-axis Consumption dependent on grippers and devices
Subject to technical modifications and errors.
9
Machines – PAG 30 Systems
PAG 30 Systems –
Optimal Compact Solutions
ROBOWORKER provides two different concepts
• PAG 30 ND systems for the lateral removal out of powder presses
and
• PAG 30 systems for the retrofitting of existing mechanical presses.
An important factor here is that the pressed part has to be removed
from the front, although the space in front of the press needs to re-
main free in order to change the adapter. That’s why the PAG 30 is
in front of the press, but offset to one side.
PAG 30 ND
10 with double conveyor belt systemFeatures of the Basic Machine
• Solid machine frame in welded construction, powder-painted
• 3-axis linear robot system RL 30/3 BG2, 4th axis in gripper (rotation)
• Optimized use of ROBOWORKER grippers and customer owned
gripping systems
• Two gripper stations for automatic gripper exchange
• Precise part placing on all kinds of sinter trays including tray
measurement
• Mobile handheld terminal (19” touch screen as an option)
• Complete case, safety doors, acryl glass windows with optimized access
• Integrated switch cabinet with safety and data relevant interface
with the press
• Small footprint
Extendable by:
• Processing of any kind of sinter tray with
- PAG 30 ND: single and double conveyor belt system
- PAG 30: double conveyor belt system
• Adding additional stations supplied by the customer as slide-in
Robot system with PAG 30 ND module or fixed installation by placing PAG 30 at a pre-determined
distance from the press
• Robot stacker, extended conveyor belt, loading/unloading system
with magazine trolley
Technical Data PAG 30 ND/PAG 30
Robot system RL 30/3, BG2 linear robot: 3 Cartesian axes XYZ; 4th axis
generated by motoric functions in the gripper (capable to be
synchronized with XYZ movements of the robot)
Repeating positioning accuracy +/- 0.05 mm
Sinter trays max. size: 460 x 500 mm
max. allocation area: 430 x 490 mm
Pick cycle for PAG 30 ND for PAG 30
without weighing: up to 25 strokes/min up to 20 strokes/min
weighing of each part: up to 20 strokes/min. up to 15 strokes/min
Operating system Windows 7
Control system Beckhoff
Electrical connection 3 x 400 V, 50 Hz, 32 A
UL standards available: e. g. 3 x 480 V, 60 Hz, 32 A
Compressed air connection/ min. 0.5 – max. 1.0 MPa, dry, oil-free acc. to ISO8573-1 class 1-2-1/
Consumption dependent on grippers and devices
Subject to technical modifications and errors.
PAG 30 positioned in front of
the press but offset to one side
11Machines – Software
Proven Software
Machines
• Control system based on industrial PC with Windows 7
• Automation software integrates real-time operating system
with PLC, NC and CNC functions
• ROBOWORKER interface for linear robots with optimized operation
for loading/unloading and palletizing tasks
Touch screen: mask for order entering • Configurable ROBOWORKER application software especially develo-
ped for press automation with minimal programming needed
• Operation via 19” touch screen or mobile handheld terminal (de-
pending on machine type) with language selection and user level
3
Generation
for access to the menu functions
- Teach mode: setting machine and product parameters
- Automatic mode: generating all automatic sequences
and setting the online parameters
Option
3
Generation
• Software compensation for precise absolute accuracy (gripper head
to part placing position on tray)
Teach mode: robot teach-in Functions of the Teach Mode
• Robot teach-in and parameterization of movements
• Set gripper parameters
• Fully automatic generation of required part placing positions
with Pattern Wizard for any kind of tray and blank
• Generation of fix patterns by entering coordinates
• Generation of complex cleaning functions
• Programming additional stations, e. g. for machining, measuring etc.
by selection and parameterization of prepared functions
Generation of part placing pattern
with Pattern Wizard
Examples of automatically generated part placing patterns
12Functions of the Automatic Mode
• Selection of all functions of automatic mode, e. g. weighing,
cleaning, sample release
• Preparation of safe automatic cycle using the options single-step
mode, step mode with partial sequences etc.
• Integrated offset movements possible at every teach point
• Operation without stops (depending on press interface)
- Automatic calculation of travel path parameter based on press
Automatic mode cycle time
• Display of machine data, operating data and statistics
Networking
• All machines can be updated with latest software versions
• Immediate support by Remote Service via VPN or customer’s client
• Support of customer’s production and ERP systems
HMI
• Standard: display of the whole user interface on mobile handheld
Selection of function “sample release” terminal
• More complex machines: combination of 19” touch screen with
keyboard and mobile handheld terminal, e.g.
- when cameras are integrated into the machine
- when machine is connected to ERP system
Technical Data Mobile Handheld Terminal
Industrial LCD TFT monitor touch panel T50-001-CES
Fully sealed housing
Buttons for system control, 6.5” TFT display
Resolution: 640 x 480 pixel
Weight: 1,330 g
Protection class: IP65
Mobile handheld terminal
Subject to technical modifications and errors
Technical Data Touch Screen
Industrial TFT monitor touch panel
Fully sealed housing
Buttons for system control, 19” TFT display
3
Generation Resolution: 1,280 x 1,024 pixel
USB socket on front side
Protection class: IP65
Subject to technical modifications and errors
Touch screen with keyboard,
handheld terminal 13Machines – Processing of Trays/Stacker Systems
Stacker Systems – Automatic Processing of
Complete Sinter Tray Stacks
1 via transport trolley (available for RHA, RAG 2)
• Double stacker system with docking stations for transport
trolleys/AGV for empty and full sinter trays integrated into the front
side or rear side of the machine
• Transport trolley:
- capacity for up to 30 sinter trays (depending on sinter tray height)
- total height approx. 1,000 mm
1 - stack height approx. 500 mm
- loads up to 200 kg
- carrier plates available for non-stackable trays
• Tray stacks processed with motorized lift units
• Cross transportation unit for placing trays in filling position
2 via roller conveyors (available for RHA)
• Roller conveyors integrated into the front or rear side of the machine
• Incoming and outgoing of stacks for loading/unloading of external
transport trolleys/AGV
• Capacity for up to 30 sinter trays (depending on sinter tray height)
2 3 via magazine trolley (available for RHA, RAG 2, PAG 30 systems)
System with big tray buffer; ideal solution for the iron powder sector
• For RHA, RAG 2
- Docking station for transport trolley/AGV for empty trays
and magazine trolley for full trays
- Transport into magazine trolley via double conveyor belt system
with motorized drive and servomotor-driven XZ linear system
- Capacity for up to 60 sinter trays
• For PAG 30 systems
- Docking station for magazine trolley
- 2-axis linear system for loading/unloading of PAG
- Capacity for up to 40 sinter trays
3
Press
XZ loading system
Press
External trolley
with up to 15 shelves
Linear robot
RL 30/3 XYZ(R) Linear robot RL 30/3 XYZ(R)
Pressed part
Working position
Die-plate upper Working position
surface
Loading position for sinter trays
Cross conveyor
unit
Loading position Lift unit
for sinter trays
Transport trolley Double conveyor belt
Stack with empty trays Stack with full trays
Left hand: Functional principle stacker system with transport trolley (longitudinal view)
Right hand: Functional principle stacker system with magazine trolley (cross-sectional view)
14Machines – Processing of Trays/Magazine Systems
Magazine Systems – The Most Flexible
Version for the Pressing Shop
available for RHA and RAG 2
• Integrated fixed magazine system with 3 – 10 levels for one
or more sinter trays
• Space between levels: 50 mm
(levels can be removed for processing higher pressed parts)
• Access to all magazine levels through an automatic lift door
even when the system is running
• Processing of sinter trays via XZ tray handling
• Integration of a second XZ tray handling
- to reduce time for tray exchange
- to integrate additional functions, such as tray cleaning
Magazine system to be integrated - to process trays with heavily loaded trays
into RHA or RAG 2 (by interconnecting both systems)
Programming of magazine system
Press
Linear robot RL 30/3
XYZ(R)
Pressed part
Working position
Working envelope of magazine system, Die-plate upper surface
Pneumatic lift door
designed in solid aluminum
Loading position for sinter trays
Freely accessible
magazine shelves
Fixed magazine system
with 10 shelves
Tray handling XZ
Functional principle magazine system (longitudinal view)
15Machines – Processing of Trays | Conveyor Belt Systems
Conveyor Belt Systems – The Compact Solution
available for RHA and PAG 30
Double conveyor belt system
• Two conveyor belts positioned one above the other for simultaneous
loading and unloading of sinter trays
• Additional conveyor belt with lifting function and left/right operation
• Buffers up to three empty and three full trays
Conveyor belt system
• Conveyor belt
• Buffers one empty tray and one full tray, one tray in filling position
(optionally extendable)
Design double conveyor belt system
PAG system with extended conveyor belt
Press
Double conveyor belt system in PAG 30 ND Linear robot RL 30/3
XYZ(R)
Pressed part
Die-plate upper surface
Loading position for sinter trays
Double conveyor belt system Lift unit
Functional principle double conveyor belt system:
PAG 30 ND (longitudinal view)
16In this section a great variety of accessories for
our automation systems will be found that can be
flexibly integrated into the systems according to
the customers’ needs. In general, these acces-
sories are available for all automation systems.
We have highlighted our latest innovations called
Generation 3 Technology, which meet the highest
demands of high-tech automation systems in
both hardware and software.
Accessories
Maximum Flexibility
in Configuration
3
Generation 3
Technology
insideAccessories – Tray Handling
Optimal Processing of Trays
ROBOWORKER offers a great variety of accessories for the different tray
processing versions – stacker systems, magazine systems, conveyor
belts – to ensure the optimal processing of round or rectangular trays.
Examples:
Magazine system
Conveyor belt system
Stacker system
18Automatic level and Z-correction for sinter trays
Measurement sensor module • Determines real place level by measuring one to three points
• Z-compensation to the XY-plane is carried out for each place point
with an offset
• Standard threads prepared for different tips and plates
Art.no. 0035090
Carrier plates
• Ensure optimal processing of sinter trays
(e. g. for different sinter tray sizes etc.)
• Sturdy design, made of stainless steel or aluminum, with recessed grips
• Stop pins for manual pre-centering of trays
• Stackable – if necessary – and in different heights Art.no. 0035219
Centering unit
Carrier plates/centering unit • For special sinter trays with holes, grooves, knobs etc.
• Active centering of trays in filling position
• Trays are pushed in X/Y, alternatively in X or Y into a stop position
Art.no. 0035214
Cleaning of trays
• During loading, trays are cleaned with an integrated cleaning station
with suction nozzles
• In addition, station can be equipped with different brush strips
• Connects to customer’s exhaust system Art.no. 0032306
Setting station for tray spacers
• For sinter tray stacking
• Station with handling system which takes spacers
Tray cleaning from a feed position and positions them onto tray
• All spacer positions freely programmable Art.no. 0031751
Buffering of parts
• Plate for buffering parts during tray exchange without press stop
• Simultaneous to press unloading, r
elocation of parts to sinter tray Art.no. 0046953
Tray measurement with automatic position correction
3
Generation
• Measurement via clearance holes in the tray or at the outer edges
• Measuring camera, trans-illumination Art.no. 0064707
Setting station for spacers
Tray measurement 19Accessories – Gripping Technology
Gripping Technology for Any Pressed Part
Rotating The standard ROBOWORKER gripper portfolio consists of motorized va-
cuum/suction grippers, hole grippers and parallel grippers with additional
functions, such as rotating, turning or tilting. In addition to this, there
are special grippers available, such as double, twofold and manifold
grippers. This range has recently been extended with the addition of a
multi-axis gripper, capable of placing the parts in any position.
The grippers have an interface for suction cups, part specific suction
plates, silicon adapters (balloons), jaws and special insets. Standard
grippers also have an interface for a flange- mounted punch cleaner.
Turning Motorized rotary grippers are also equipped with a reference sensor
for the exact positioning of the part after the rotation process.
Motorized movements are freely programmable and are integrated auto-
matically into the robot’s movements. For example, the rotary function
can be used within the de-burring station to significantly increase the
de-burring results. ROBOWORKER balloon grippers may also be equipped
with special integrated de-burring nozzles.
ROBOWORKER offers a gripper adapter module to enable the use of both,
Tilting ROBOWORKER and customer owned grippers.
Left hand: Vacuum/suction gripper with motorized tilting function, suction pieces
Right hand: Balloon gripper with motorized turning function, balloons
User friendly teach-in software
for grippers
Left hand: 3-jaw hole gripper with motorized rotary function, set of gripper jaws with changeable pins
Right hand: 2-jaw parallel gripper with motorized turning function, customized gripper jaws
20Vacuum/Suction Grippers
1 1 Basic model
Vacuum/suction gripper, basic model • Gripper body
• Adapter plate with a metric M5 thread
(other threads upon request) Art.no. 0034750
This gripper type is available with the following additional functions:
2 with motorized rotary function
• For blanks which have to be rotated up to 360 degrees
between pick and place
• Acceleration and deceleration rotation speed
2 freely programmable Art.no. 0040861
Vacuum/suction gripper with motorized 3 with motorized turning function
rotary function and reference sensor • For blanks which need to be arbitrarily turned between
pick and place
3
Generation • Turning speed in both direction freely
programmable Art.no. 0049211
4 with motorized tilting function
• For blanks which need to be arbitrarily tilted between
pick and place
3
Generation • Tilting speed in both direction freely
programmable Art.no. 0049760
3
Vacuum/suction gripper The standard scope of delivery of all vacuum/suction grippers ROBO-
with motorized turning function WORKER includes three flat suction cups with diameter 5, 6 and 8 mm.
Extensions
Universal suction adapter
• Suction adapter available for modification by customer
• Three unmachined suction plates (Ø 80 mm) for free positioning
of bore holes
• Suction cups are not within the scope of delivery Art.no. 0035409
4
Vacuum/suction gripper Universal suction adapter
with motorized tilting function • Suction adapter available for modification by customer
• Three unmachined suction plates (Ø 45 mm) for free positioning of
bore holes
• Suction cups are not within the scope of delivery Art.no. 0051359
Example universal
suction adapter
21Accessories – Gripping Technology
1
Balloon gripper, basic model; Hole Grippers
suction/balloon gripper, basic model
Balloon Grippers
ROBOWORKER balloon grippers are prepared for any balloons and are
especially suitable for sensitive blanks that have to be gripped without
leaving impressions. All balloon grippers come with three sample balloons
with diameters 2.55, 4.2 and 5.2 mm. Upon request ROBOWORKER will
also provide a complete list of available balloons.
2 1 Basic model Art.no. 0034752
Balloon gripper and suction/balloon gripper with
motorized rotary function and reference sensor This gripper type is available with the following additional functions:
2 with motorized rotary function Art.no. 0040863
3
Generation
3 with motorized turning function
4 with motorized tilting function
Art.no. 0049213
Art.no. 0049762
Additional gripper variants offering even more flexibility:
• Combined suction/balloon gripper Art.no. 0047048
• Combined suction/balloon gripper with motorized rotary function,
3
Balloon gripper with motorized turning function 3
Generation convertible from suction to balloon gripper by use of an adapter
(not available with blowing function) Art.no. 0044940
Special insets with blowing function for balloon grippers
as an alternative to balloons available in different gripping ranges:
• Gripping range 3.0 – 3.5 mm Art.no. 0051146
• Gripping range 3.5 – 4.2 mm Art.no. 0051147
• Gripping range 4.0 – 5.2 mm Art.no. 0051148
• Gripping range 5.0 – 6.5 mm Art.no. 0051149
4 • Gripping range 6.3 – 8.0 mm Art.no. 0051150
Balloon gripper with motorized tilting function
2- and 3-Jaw Hole Grippers
As a further option for gripping the blank in the hole, ROBOWORKER offers
2-jaw and 3-jaw hole grippers with a total stroke of 6 mm. Standard
gripper jaws with changeable gripper pins are within the scope of delivery.
5 Basic models Art.no. 0046783 (2-jaw)
Art.no. 0046156 (3-jaw)
5 6 With motorized rotary function Art.no. 0035343 (2-jaw)
2-/3-jaw hole gripper Art.no. 0034717 (3-jaw)
Complimentary accessories
• For 2-jaw hole grippers: special set of gripper jaws with integrated
segment pins for the smallest bore holes Art.no. 0038538
6
2-/3-jaw hole gripper with motorized
rotary function and reference sensor
Special set of gripper
Special inset with Gripper jaw with jaws with integrated
blowing function changeable pin segment pins
221
2-jaw parallel gripper, gripping force 10 N Parallel Grippers
ROBOWORKER parallel grippers are double acting and offer a total stroke
between 4 and 12 mm. All parallel grippers (with the exception of the
tilting grippers) are additionally fitted with a dust cover and are therefore
able to cope with the challenging powder press environment.
2 1 Basic model with 10 N gripping force Art.no. 0045714
2-jaw parallel gripper, gripping force 30 N 2 Basic model with 30 N gripping force Art.no. 0045740
3 Basic model with 45 N gripping force Art.no. 0064745
4 With motorized turning function, gripping force 10 N Art.no. 0048997
5 With motorized turning function, gripping force 30 N Art.no. 0048998
6 With motorized turning function, gripping force 45 N
3
Generation 7
8
With motorized turning function 90° (lateral picking)
With motorized tilting function
Art.no. 0067601
Art.no. 0048999
Art.no. 0049755
3
2-jaw parallel gripper, gripping force 45 N The parallelism of the gripping jaws is an important factor as it guarantees
very precise gripping of the blank. The gripper jaws for parallel grippers
(Art.no. 0031762) are customized and are not within the scope of delivery.
4
2-jaw parallel gripper with
motorized turning function, gripping force 10 N
Customized
gripper jaws
5
2-jaw parallel gripper with
motorized turning function, gripping force 30 N
6
2-jaw parallel gripper with
motorized turning function, gripping force 45 N
7 8
2-jaw parallel gripper 90° 2-jaw parallel gripper
with motorized turning with motorized tilting function
function
23Accessories – Gripping Technology
Special Grippers
1
This double gripper combines 1 Double grippers
parallel and suction gripping • For parts that have to be gripped differently within one cycle due to
their geometry or position
• Combination of two gripping modes,
e. g. suction and gripping with pliers
• Additional rotating, tilting or turning available
2 Twofold and manifold grippers
• Grip more than one part
2
Left hand: Example for a fivefold gripper
Right hand: Example for a twofold gripper 3 Multi-axis gripper
• For parts that have to be brought into special positions
• Integrated turning and rotating axes with servo drives and Harmonic-
3
Generation
drive (including reference sensors for quick referencing)
• Convenient set up software
• Freely programmable gripper movements, axes, timings, infeeds,
gripping functions
• Suitable for suction/balloon and parallel grippers
• Maximum repeating accuracy (± 0.01 mm!) Art.no. 0063447
3
User interface multi-axis gripper
7
Gripper exchange system 3.0
Rotating – turning – tilting,
3 movements comparable to a 6-axis robot
but easier to teach-in and operate
24Extensions Gripping Technology
1 Electric pressure control valves for gripping and blowing functions
• Standard: integration of one pressure control valve
1 for balloon and parallel grippers
Electric • Product specific saving of parameters
pressure control valve • Freely programmable pressure up to 6 bar (0.6 MPa) Art.no. 0031632
2 Second vacuum circuit
• For manifold grippers
• Assembled at Z-axis
• Integrated vacuum query Art.no. 0034729
3 Gripper station
• For gripper storage during the cleaning operation or for punch cleaner
storage during the removal process (as a standard in double version)
• Consisting of: adjustable base plate with centering and supporting
2 pins for the respective tool
Second • Modified versions available for special requirements Art.no. 0035069
vacuum circuit
4 3/2 valves
• Control of additional gripper functions,
such as blow pulses and expansion Art.no. 0031773
5 Base body for customer owned gripper
• Use dependent on gripper type Art.no. 0061747
6 Precision adapter for customer owned gripper adapter
• Axial or radial pneumatic connections
• 18 optional electric connection pins Art.no. 0036763
3 7 Gripper exchange system 3.0
Gripper station • With electric interface extension for up to two servo drives
• Maximum exchange precision due to prism and flat bolt system
• Maximum repeating accuracy in X-/Y directions
3
Generation
as well as in rotation in relation to the gripper head
• Designed for multi-axis gripper, but suitable for docking
of all grippers from ROBOWORKER gripper range Art.no. 0063448
4
3/2 valves
5 6
Base body for customer owned gripper Gripper adapter
25Accessories – Gripping Technology
Technical Data (material housing of all grippers made of aluminum hard anodized)
Vacuum/Suction Grippers
with motorized
Vacuum-/ rotary function and with motorized with motorized
suction grippers reference sensor turning function tilting function
Blank weight max. 500 g max. 150 g max. 150 g max. 150 g
0° up to 360° 0° up to 360° up to 180°
Function range (freely programmable) (freely programmable) (freely programmable)
Adapter
for suction cup M5 or customized M5 or customized M5 or customized M5 or customized
max. up to 0.8 bar max. up to 0.8 bar max. up to 0.8 bar max. up to 0.8 bar
Vacuum (0.08 MPa) (0.08 MPa) (0.08 MPa) (0.08 MPa)
Balloon Grippers
with motorized
rotary function and with motorized with motorized
Balloon grippers reference sensor turning function tilting function
Blank weight max. 150 g max. 50 g max. 50 g max. 50 g
0° up to 360° 0° up to 360° up to 160°
Function range (freely programmable) (freely programmable) (freely programmable)
Balloon 0 up to 6 bar Balloon 0 up to 6 bar Balloon 0 up to 6 bar Balloon 0 up to 6 bar
Operating pressure (0 up to 0.6 MPa) (0 up to 0.6 MPa) (0 up to 0.6 MPa) (0 up to 0.6 MPa)
M24 x 1.5 M24 x 1.5
outside thread or outside thread or
Adapter for balloon customized customized customized customized
Balloon size Ø 2.3 up to 11.4 mm Ø 2.3 up to 11.4 mm Ø 2.3 up to 11.4 mm Ø 2.3 up to 11.4 mm
Suction/Balloon Grippers
Suction/balloon grippers with motorized rotary
Suction/balloon grippers (convertible) function and reference sensor (convertible)
as suction gripper: max. 500 g as suction gripper: max. 150 g
Blank weight as balloon gripper: max. 150 g as balloon gripper: max. 50 g
Function range 0° up to 360° (freely programmable)
Operating pressure Balloon 0 up to 6 bar (0 up to 0.6 MPa) Balloon 0 up to 6 bar (0 up to 0.6 MPa)
Adapter for suction M5 or customized/M24 x 1.5 M5 or customized/M24 x 1.5
cup/balloon outside thread or customized outside thread or customized
Vacuum max. up to 0.8 bar (0.08 MPa) max. up to 0.8 bar (0.08 MPa)
Balloon size Ø 2.3 up to 11.4 mm Ø 2.3 up to 11.4 mm
262-/3-Jaw Hole Grippers
2-/3-jaw hole grippers with motorized
2-/3-jaw hole grippers rotary function and reference sensor
Gripping force 7 N at 1 bar (0.1 MPa); 39 N at 5 bar (0.5 MPa) 7 N at 1 bar (0.1 MPa); 39 N at 5 bar (0.5 MPa)
Total stroke 0 up to 6 mm (adjustable) 0 up to 6 mm (adjustable)
Function range 0° up to 360° (freely programmable)
Speed/function time 100°/sec. rotary function stepping motor driven
Parallel Grippers
2-jaw- parallel grippers
2-jaw parallel grippers with motorized turning function
Gripping force 10 N; 30 N; 45 N 10 N; 30 N; 45 N
Total stroke 10 N: 4 mm; 30 N: 6 mm; 45 N: 12 mm 10 N: 4 mm; 30 N: 6 mm; 45 N: 12 mm
Function range 0° up to 360° (freely programmable)
Operating pressure up to 7 bar (0.7 MPa) up to 7 bar (0.7 MPa)
2-jaw parallel grippers 90° 2-jaw parallel grippers
with motorized turning function with motorized tilting function
Gripping force 23 N 23 N
Total stroke 4 mm 4 mm
Function range up to 90° (freely programmable) up to 90° (freely programmable)
Operating pressure up to 7 bar (0.7 MPa) up to 7 bar (0.7 MPa)
Multi-axis Grippers
Blank weight up to 500 g Positioning
repeatability +/- 0.01 mm
turning axis: -5° – 185°
Function range rotary axis: -95° – 95° Execution as jaw, hole or vacuum/suction gripper
Accuracy Gripping force adjustable with digital pressure control valve
of motors 3,000 steps/r
Programmable usage total flexibility at all teachpoints
Resolution setting 0.1°/0.01 mm Operating pressure up to 7 bar (0.7 MPa)
Technical Data Clamping Jaw Sets (approx. 0.2 mm clearance has to be allowed for at each jaw)
Suitable for 2-/3-jaw hole grippers Suitable for 2-jaw hole grippers
(standard) (for smallest holes)
Gripping range 1 9.2 mm (Ø opened)/3.2 mm (Ø closed) 7.2 mm (Ø opened)/1.6 mm (Ø closed)
Gripping range 2 13.3 mm (Ø opened)/7.2 mm (Ø closed)
Subject to technical modifications and errors
27Accessories – Punch Cleaning
Flexible Cleaning of Press Tool
Whether the punch needs to be cleaned frequently or only occasionally,
ROBOWORKER has the appropriate cleaning solution for each task. The
1 remaining powder is removed by brushes or by air nozzles in the punch
Balloon gripper with cleaner.
flange-mounted punch cleaner
1 Flange-mounted punch cleaner
• For frequent cleaning
• Mounted on ROBOWORKER gripper interface
• Programmable cleaning rhythm
• Rotating double brush head with blowing function
• Usage dependent on press adapter and gripper type
Art.Nr. 0046861
2 Separate punch cleaner
2 • For occasional cleaning operations or for grippers that,
Separate punch cleaner due to design, cannot carry flange-mounted punch cleaners
• Stored on gripper station
• Rotating double brush head Art.Nr. 0044147
As a standard, ROBOWORKER delivers 10 cup brushes with a punch
cleaner. Further brushes, such as porcupine or paint brushes can easily
be plugged in.
Non-contact measurement of the upper punch position (Art.no.
0035135) is available for presses unable to accurately reach the cleaning
position (normally mechanical powder presses). The measured deviation
is calculated in the punch cleaning operation.
3 Separate punch cleaning robot
• For flexible and individual cleaning of upper and lower punches,
3
Generation
multi-punches or cross hole pressing device
• Flexibility in cleaning equipment,
e. g. CO , ultrasonic cleaning bath, brushes
²
• 6 axis Fanuc robot for punch cleaning with load capacity 5 – 10 kg
• Gripper exchange upper and lower part with holder
for customer‘s cleaning tools
• Handheld terminal for mobile and stationary use
• Including basic functions for punch cleaning
3 • Including interface (software and electrics) with press
Separate punch cleaning robot • Including safety housing with door Art.Nr. 0064709
Cup brush (hard), Cup brush (soft), Porcupine brush, 1st gen.
Art.no. 0035278 Art.no. 0031728 Art.no. 0035428 Paint brush,
Porcupine brush with snap on, Art.no. 0031293
28 2nd gen., Art.no. 0037923
Further brush options1
Cleaning Program Module
The cleaning program module allows the user to use product specific
cleaning programs and parameterize them via the software interface.
There are different options for creating a cleaning program – automatic
or manual:
1 Calculate simply
• Automatic generation of cleaning program by entering the basic
size of geometric shapes
2
2 Calculate from ISO
• Automatic generation of cleaning program by entering ISO
or similar part sizes
3 Line & Circle
• For blanks that do not fit into the ISO range or if a manual set-up
is preferred
• Teach-in and saving of movement made by punch cleaner
via handheld terminal
4 Option NC
• Option for NC programming, e. g. using the outline of the punch
3
• Data entered at the USB interface of the handheld terminal
• Not within the standard scope of the cleaning program module
These methods of creating cleaning programs can be combined for either
upper or lower punch. Cleaning repetitions and direction of the punch
cleaner (clockwise or anti-clockwise) can also be individually programmed.
For split punches the cleaning program can be individually adapted to
each segment of the punch.
Technical Data Punch Cleaner
4 Flange-mounted Punch cleaner
punch cleaner with rotating brush
Speed 2,100 RPM 2,100 RPM
Rotary function motorized motorized
Stall torque 0.1 Nm 0.1 Nm
Material housing Aluminium, hard anodized Aluminium, hard anodized
Weight 1.1 kg 0.7 kg
Clip lock for
Clip lock for fast brush change,
Other fast brush change Blowing function
Subject to technical modifications and errors
29Accessories – De-burring Functions
Clean and Burr-free Blanks
Many blank types are required to be free from burrs or other particles
after the pressing process. ROBOWORKER offers different options for
1 optimal cleaning results which can be used individually or in combination
Rotating de-burring brush and with one another.
air box with outline blowing nozzles
1 Rotating de-burring brush
• For the removal of particles from below
• Station adjustable in height
• Gripper path over brush can be freely parameterized
• Brush body prepared for fine hair (natural or synthetic hair)
of different thicknesses
• Option: food-safe versions of brushes
• Option: second rotating de-burring brush for de-burring
from top 3 (handling of pressed part
with parallel gripper) Art.no. 0035393
2 2 Combination of lateral de-burring and de-burring from below
Additional lateral de-burring • Rotating de-burring brush for the removal of particles from below
• Two (extendandable to four) fixed lateral brushes for lateral
removal of particles
• Distance between brushes and height adjustable
• Gripper path over brush can be freely parameterized
Art.no. 0069264
3
Rotating de-burring brushes
from top and from below
De-burring brush
with natural hair attachment
30 De-burring brush with
synthetic hair attachment1 Air box
• Two lateral blowing nozzles, adjustable in height and angle,
to remove powder residues
• Four outline blowing nozzles in different designs (also customized)
for de-burring
• Gripper path over air box can be freely parameterized
3
Generation
• Extendable with electric pressure control valve
• Station with connection to customer’s exhaust system
Art.no. 0035273
2 Gripper adapter
1 • Additional de-burring with balloon gripper and
Schematic view air box blowing function from above
• Hole pattern of nozzle adapted to blank size Art.no. 0043794
29 mm
2
32 mm
Balloon gripper with adapter for de-burring
gripper adapter
connecting nut
Ø 32 mm
blowing nozzle
balloon
Ø 46 mm
Pattern of the blowing holes
Each air box is delivered with a round,
two rectangular and
one triangular outline nozzles 31Accessories – Assistance Systems for Quality Assurance
Blank Quality Doesn’t Only Hinge on the Press
Different assistance systems for quality assurance of the pressed part
complete the accessory overview for powder press automation. This
includes, among others, weighing of blanks, several inspections and
measurements or removal of samples and rejects.
Inspection/Measurement of Parts
Weighing
Depending on the requirements of the customers, ROBOWORKER com-
pletely integrates one or two precision weighing cells by Mettler Toledo,
Wipotec or Sartorius into the removal robot. An accuracy of +/- 5 mg or
more can be achieved in the process, depending on the environmental
conditions.
1 Preparation of weighing cell
• Execution for scales with accuracy of < 10 mg
• Separate scale foot and heavy support plate for the scale
• Solid aluminum cover for scale protection
• Interface for scale(s) separate art.no. 0035291
• Weighing software for up to two scales with
weighing functions such as
- interval weighing (user-defined adjustment)
- parameter assignment
- measured-value processing
- transmission to press control
- manual mode
• Operation via touch screen or mobile handheld terminal
Art.no. 0035209
1
Preparation of weighing cell 2 Blowing and suction for scales
• Four pneumatic valves, pressure control valve
• Twofold blowing and suction nozzles
• Prepared for connection to customer’s exhaust system Art.no. 0035402
3 Export of weighing data
• Export by USB interface or via network connection Art.no. 0031769
4 If multiple press tools are used, the additional function
of multiple weighing is provided on request.
2
Blowing and suction for scales
32Precision weighing cells (extract of cell range)
Maximum capacity Readability
Mettler Toledo WMS 104C 120 g 0.1 mg
Mettler Toledo WMS 204 220 g 0.1 mg
5
Mettler Toledo WMS 403 410 g 1 mg
Height measuring station;
Mettler Toledo WMS 404C 410 g 0.1 mg
ensor height measuring station
Mettler Toledo WMS 803 820 g 1 mg
Mettler Toledo WMS 1203C 1,220 g 1 mg
Wipotec SW 20/150 20 g 1 mg
Wipotec SW 50/300 50 g 2 mg
Wipotec SW 100/400 100 g 2 mg
Wipotec SW 200/600 200 g 10 mg
Wipotec SW 500/1000 500 g 20 mg
Sartorius WZA 224-N 220 g 0.1 mg
Sartorius WZA 523-N 520 g 1 mg
Subject to technical modifications and errors
5 5 Height measuring station
Integrated round cycle table • Rotating two position component support plate (handling position
or measuring position)
• Digital sensor (absolute) with pneumatic stroke function
- Adjustable in height
- Depending on requirement up to four sensors (two from above
and two from beneath) can be integrated
• Different stylus available
• Sequence software, measured-data acquisition and data transmis-
sion integrated into control
• Measuring range of sensor: 20 mm
• Accuracy in process: up to 0.01 mm Art.no. 0035297
6
Control of the blank’s bottom Variant
face by camera system • Integrated round cycle table with height measurement, weighing
plus machining (here: drilling, de-burring, hole-cutting)
Note: The cycle time is reduced by the height measurement.
6 Support visual control of blank bottom face
• Image processing system takes photos of bottom face on manual
request or in intervals
• Image generation without evaluation via handheld terminal
• After image analysis, part is either reintegrated into the pick and
place process, removed as a sample part or rejected Art.no. 0043742
7 Optical inspection of parts
• Image processing system with telecentric illumination for in-
3
Generation
spection with trans-illumination
• Part holder
• Incident-illumination for inspection from above
• Software functionality for measuring tasks included Art.no. 0064768
7
Optical inspection
3
33Accessories – Assistance Systems for Quality Assurance
Part Monitoring
8 Gripper sensor technology
8 • Vacuum sensor for all vacuum/suction grippers (for other gripper
Integrated vacuum sensor types only partly available) to monitor the presence of pressed part
on gripper during the entire cycle
• On request: definition of options for integrating sensors into grippers
9 Light barrier/laser sensor
• Indirect or direct inspection of pressed part, e. g. to avoid
double pressing resulting in tool damage
• Sensors ensure that pressed part has been picked up
before the next part is pressed
• Readjustment of position setting of light barrier/laser
sensor when grippers or part type are changed Art.Nr. 0043740
10
Part counting with laser triangulation 10 Part counting system
• Process reliability in the counting process via laser triangulation
3
Generation • Usage of camera and laser systems (tray is viewed from different angles)
Art.no. 0064769
Blank Removal
11 Removal of samples
• Electric belt conveyor module with toothed belt drive and geared motor
• Removal of samples according to cycle set or
11 in response to a manual request Art.no. 0035079
Standard sample belt
12 Reject box
• Collection box made of stainless steel
• If box is fitted outside the machine, rejects are removed via sample belt
• If box is mounted in the machine, blank is ejected directly by the gripper
• Blank is rejected when press signals defect and if weighing results
or height measurements are outside the entered tolerance
Art.no. 0035092
Assistance Systems for Teach-in
11
Sample belt for round parts 13 Support of manual teach-in in press
• For teach-in of poorly visible work piece/gripper combinations
3
Generation • Camera systems on gripper and in press
• Enlarged photo displayed on screen enables exact positioning
of gripper without parallax error Art.no. 0064770
12
Reject box
34Service
ROBOWORKER Service
Customer satisfaction is our highest priority. Therefore we have compiled
a vast service package that meets all of our customers’ needs.
Hotline
• Competent technical teleservice by qualified engineers and technicians
- consulting service, failure diagnosis and analysis
- direct recovery of machine failures
• Fast worldwide availability of spare parts and spare part packages
• Efficient planning of on-site services with our customers
Range of services offered by our leading team of technicians
• Set-up and commissioning of ROBOWORKER machines
• Execution of acceptance tests
• Training on machines in Weingarten or at customers’ site
• Production support
• Preventive maintenance
35Overview of Article Numbers
RHA Systems
Description Art.no. Catalogue p. Remarks
RHA basic machine 0059347 6/7
RAG 2 Systems
Description Art.no. Catalogue p. Remarks
RAG 2 basic machine 0035088 8/9
Stacker system for sinter trays 0035119 14
normally two trolleys/stacker system
Transport trolley with folding side walls 0035120 14 for empty and full sinter trays
Double conveyor belt system with motor
drive and FU control module 0043139 14
for transferring full sinter trays
XZ loading system for sinter trays 0033318 14 from the conveyor belt
Magazine trolley for storing
full sinter trays 0031771 14
the number of levels is flexible
Integrated magazine system with 3 levels 0035290 15 between 3 and 10
Integrated magazine system with 10 levels 0035227 15
Additional tray handling 0031630 15 for reduction of tray change time
PAG 30 Systems
Description Art.no. Catalogue p. Remarks
PAG 30 ND basic machine 0043604 10/11
PAG 30 basic machine 0035281 10/11
Double conveyor belt system for sinter trays 0043607 16
necessary protection as press stands offset
Protection doors between PAG 30 and press 0035093 11 to the automation system
Robot stacker 0048913 11 consisting of 2 positions
Extended conveyor belt 0043712 11
Loading/unloading system 0070751 11
Magazine trolley 0070750 11
General
Description Art.no. Catalogue p. Remarks
upon request, all machines may be delivered
Delivery of machine acc. to UL-standards 0045512 7/9/11 according to UL-standards
36Accessories
Description Art.no. Catalogue p. Remarks
Tray handling
Automatic level and Z-correction for sinter
trays (level and thickness compensation) 0035090 19
set of 10 plates; carrier plates within scope of
Carrier plates 0035219 19 delivery of RAG 2 within magazine system
Centering unit for sinter trays 0035214 19 for special trays (e. g. trays with holes, grooves)
via suction nozzles;
Cleaning of trays 0032306 19 integrated cleaning station
Setting station for tray spacers 0031751 19
Buffer function 0046953 19
Tray measurement
with automatic position correction 0064707 19
Gripping technology
Vacuum/suction grippers
Vacuum/suction grippers 0034750 21 delivery including 3 standard suction cups
Vacuum/suction gripper with motorized
rotary function and reference sensor 0040861 21 delivery including 3 standard suction cups
Vacuum/suction gripper with motorized
turning function 0049211 21 delivery including 3 standard suction cups
Vacuum/suction gripper with motorized
tilting function 0049760 21 delivery including 3 standard suction cups
adaptation by customer,
Special suction adapter 0035409 21 delivery without suction cups, Ø 80 mm
adaptation by customer,
Special suction adapter 0051359 21 delivery without suction cups, Ø 45 mm
Hole grippers
blowing nozzles available;
Balloon gripper 0034752 22 delivery incl. 3 balloons
Balloon gripper with motorized rotary function blowing nozzles available;
and reference sensor 0040863 22 delivery incl. 3 balloons
Balloon gripper with motorized turning function 0049213 22 delivery incl. 3 balloons
Balloon gripper with motorized tilting function 0049762 22 delivery incl. 3 balloons
no blowing nozzles available; delivery incl.
Suction/balloon gripper (convertible) 0047048 22 3 standard suction cups and 3 balloons
37Overview of Article Numbers Description Art.no. Catalogue p. Remarks Hole grippers Suction/balloon gripper with motorized rotary no blowing nozzles available; delivery incl. function and reference sensor (convertible) 0044940 22 3 standard suction cups and 3 balloons Special insets with blowing function 0067463 22 gripping range 2.0 – 3.0 mm Special insets with blowing function 0051146 22 gripping range 3.0 – 3.5 mm Special insets with blowing function 0051147 22 gripping range 3.5 – 4.2 mm Special insets with blowing function 0051148 22 gripping range 4.0 – 5.2 mm Special insets with blowing function 0051149 22 gripping range 5.0 – 6.5 mm Special insets with blowing function 0051150 22 gripping range 6.3 – 8.0 mm 2-jaw hole gripper 0046783 22 delivery incl. set of jaws with changeable pins 2-jaw hole gripper with motorized rotary function and reference sensor 0035343 22 delivery incl. set of jaws with changeable pins 3-jaw hole gripper 0046156 22 delivery incl. set of jaws with changeable pins 3-jaw hole gripper with motorized rotary function and reference sensor 0034717 22 delivery incl. set of jaws with changeable pins Jaw (without pins) suitable for 2- and 3-jaw grippers 0017958 22 2 or 3 jaws are necessary for one gripper Set of changeable pins for 2-/3-jaw hole grippers 0019449 22 set consisting of 10 pins Set of special gripper jaws with integrated segment pins for smallest holes 0038538 22 only available for 2-jaw hole grippers Parallel grippers (gripper jaws are not scope of delivery) 2-jaw parallel gripper 0045714 23 double acting; gripping force 10 N; dust cover 2-jaw parallel gripper 0045740 23 double acting; gripping force 30 N; dust cover 2-jaw parallel gripper 0064745 23 double acting; gripping force 45 N; dust cover 2-jaw parallel gripper with motorized turning function 0048997 23 double acting; gripping force 10 N; dust cover 2-jaw parallel gripper with motorized turning function 0048998 23 double acting; gripping force 30 N; dust cover 2-jaw parallel gripper with motorized turning function 0067601 23 double acting; gripping force 45 N; dust cover 2-jaw parallel gripper 90° double acting; gripping force 23 N; with motorized turning function 0048999 23 lateral picking 2-jaw parallel gripper with motorized tilting function 0049755 23 double acting; gripping force 23 N Set of jaws for parallel grippers 0031762 23 customized 38
Description Art.no. Catalogue p. Remarks
Special grippers
Multi-axis gripper 0063447 24
Extension gripping technology
Electric pressure control valve to replace pneu-
matic valves used in machine/accessories 0031632 25 automatic, programmable
Second vacuum circuit 0034729 25 pipe (port W9): Ø 5 mm
Gripper station 0035069 25
connection to port: Ø 5 mm; necessary for
3/2 relief valves (2x) 0031773 25 activating blowing nozzles (balloon grippers)
Base body for customer owned gripper 0061747 25 use dependent on gripper type
Precision adapter for grippers 0036763 25 standard
Gripper exchange system 3.0 0063448 25
Punch cleaner
Flange-mounted punch cleaner
with blowing function 0046861 28 mounted on the gripper
Punch cleaner, rotating with air blow function 0044147 28
Cup brush 0035278 28 hard
Cup brush 0031728 28 soft
Paint brush 0031293 28
Porcupine brush, 1st gen. 0035428 28
Porcupine brush with snap on, 2nd gen. 0037923 28
Upper punch measurement 0035135 28
Separate cleaning robot 0064709 28
De-burring
brush body Ø 60 mm, natural hair from
0.02 mm thickness; synthetic hair from
0.075 mm thickness; food-safe version
Rotating de-burring brush 0035393 30 min. hair diameter 0.075 mm
Combination of lateral and de-burring from below 0069264 30
Air box 0035273 31 with connection to customer’s exhaust system
Insert for outline blowing nozzle air box 0045883 31
Insert f. outline blowing nozzle air box with design 0045884 31 e. g. special geometry
Blowing nozzle for gripper 0043794 31 controlled via port W8
39You can also read