Mathematical Method to Construct the Linear Programming of Football Training
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Applied Mathematics and Nonlinear Sciences (aop) (aop) 1–6
Mathematical Method to Construct the Linear Programming of Football
Training
Gang Liu
School of Science and Technology, Nanchang University, Gongqing, Jiangxi, 332020, China
Submission Info
Communicated by Juan Luis García Guirao
Received January 11th 2022
Accepted March 15th 2022
Available online July 15th 2022
Abstract
This article uses mathematical modeling methods to predict the trajectory of a free kick in football. The article
calculates the parameters of the ball's trajectory and quantifies the power of direct free kick shots. The article
combines Kalman filter prediction and linear interpolation to supplement the position of the missed ball in the
video. The experimental results show that the estimated result of this method is highly similar to the actual flight
trajectory of football. This algorithm can be applied in practice.
Keywords: Adaptive algorithm; Football free-kick; Running trajectory; Prediction model; Kalman
filter
AMS 2010 codes: 93C40
1. Introduction
By observing the football game video, it can be seen that the direct free kick of football is a
more varied and complex way of scoring. There are many classic shots in football matches
and some scoring skills that cannot be replicated, which have strong reference and research
significance. A direct free kick in a football game can play a role in determining the trend of
the game. We predict the trajectory of free kicks, on the one hand, to better help the
goalkeeper defend. On the other hand, it can also help football players improve their skills.
No matter from which aspect, it will provide the audience with a wonderful football game.
Foreign scholars have studied various trajectory prediction models for the prediction of
football trajectories. The content contains hidden Markov models [1]. The model divides the
whole area into multiple small areas through clustering. The final model is obtained by
training each region through the hidden Markov model. On this basis, the Viterbi algorithm
calculates the best-hidden state sequence to realize the prediction of trajectory points. The
experimental results show that the model can realize the prediction of different trajectories.
Still, the problem of continuous value discretization needs to be considered when using the
model to make predictions. Because many parameters need to be divided manually, the
*Corresponding author.
Email address: liugang6680@163.com
This work is licensed under the Creative Commons Attribution alone 4.0 License
ISSN 2444-8656 DOI: 10.2478/amns.2022.2.00026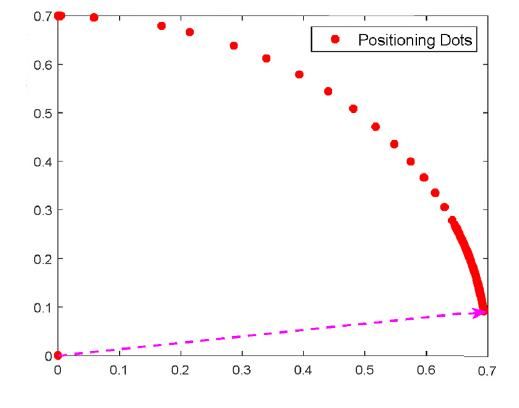
Applied Mathematics and Nonlinear Sciences (aop) (aop) 1–6 accuracy will be affected. In recent years, domestic research on the prediction of football trajectories has gradually matured. The more common prediction models are the trajectory prediction model based on Kalman filtering and the prediction model based on the firefly algorithm. The former can continuously modify the predicted value through measurement, and at the same time, modify the model parameters and statistical noise parameters and reduce the impact of noise. This realizes the prediction of the running trajectory. The latter uses a dynamic collision avoidance method combined with sliding mode control to track the football trajectory. However, the model's response to the target motion state is relatively slow in application [2]. This leads to a relatively high RMSE of the trajectory parameters of the model and a relatively large trajectory offset. Aiming at the problems of existing methods, we propose a football-free kick trajectory prediction model based on adaptive IMM. The article uses adaptive IMM to correct the target motion state and solve the problems of traditional prediction models. 2. Design of the prediction model for the trajectory of a direct free kick in football 2.1 Determine the running parameters of the football direct free kick Based on our research on football direct free kicks, we find that free kicks often fly to the goal at a faster speed. In the initial state of the free-kick, it is still in a static position, and its inertia needs to be overcome when hitting [3]. Therefore, we can observe the rules and characteristics of the players' free kicks from the videos of football matches. Most athletes can hit the ball out of the spin without going over the center of the ball when exerting force when executing a free throw. This makes the football have a large arc in the cross-section. This can bypass other players and interfere with the goalkeeper's judgment on the state of the ball. The sphere is almost without any rotation. But the trajectory of the entire sphere in the cross- section does show an arc-shaped change. This is also why a free kick is called a "scoring against the laws of physics." Free kicks generally occur at a distance of 32m or 42m from the goal. The goal area for most free kicks is concentrated at a distance of 28±3m. The farther the free throw is, the easier it is for the goalkeeper to react. The closer the free throw is, the harder it is to cross the wall [4]. It is difficult for a non-rotating sphere to achieve a large-angle operation without considering the influence of the wind direction on the sphere's trajectory. A translational and rotating sphere is subjected to a lateral force perpendicular to the direction of speed when flying in the air. Under the action of this side force, the sphere will deviate from the original flight trajectory and deflect to one side to form a curved ball. For a rotating sphere that moves forward, rotation and air viscosity work together to circulate the boundary layer around the sphere. The lateral force generated by the football in the cross-section will cause the pressure on the side where the flow is accelerated to drop. And the pressure on the side where the flow is slowed to increase. We think of football as an ideal sphere under given conditions. The lateral force generated by the sphere on the cross-section is proportional to the flight speed and the rotation angle, and neither the flight speed nor the rotation angle is zero. If the value of the above two parameters is 0, the football flight direction will point to the same side under the continuous action of side force. Therefore, the flight speed and rotation angle are used as the parameters to establish the prediction model of football's direct free-kick trajectory under this condition. We regard the movement process of a football direct free-kick as the movement of a sphere of uniform mass in the gravitational field in the fluid [5]. When the Reynolds number is in the range of [300, 3×105], the air will fall off on both sides of the football's back and rotate in opposite directions. This produces a periodic abrupt lateral force acting on the sphere to cause the sphere to produce lateral displacement in motion. However, due to the periodic shedding
Applied Mathematics and Nonlinear Sciences (aop) (aop) 1–6
of the linear vortex, the sphere is in a dynamic equilibrium state. It isn't easy to detect the
lateral movement of the sphere only by visual observation. When the Reynolds number is in
the range of [3×105, 3×106], the periodic change disappears. This will cause a lateral force
directed to one side at a certain moment to cause a lateral displacement of the sphere that can
be observed with the naked eye. When the Reynolds number is greater than 3×106, the
periodically changing linear vortex will appear again. It can be seen that the key critical point
for whether the football direct free kick will spontaneously produce lateral displacement
during running on the cross-section is the Reynolds number.
2.2 Estimating the state of football
Because there is a non-linear motion situation in football direct free kick, we default the
football motion state and observation values as follows:
X (i ) h[ X (i 1), a (i 1), b(i 1)] (1)
Y (i ) g[ X (i ), c(i )] (2)
X (i) represents the football state of the i cycle. Y (i ) represents the observation value of the
i period, and the observation value refers to the space position of the football in the current
state. h represents the state transition function. g represents the observation function, and
c(i ) represents the observation error matrix of the i period. a represents the control amount
of the i first cycle. b represents the error matrix. Because the covariance of the above two
functions needs to be obtained in the subsequent calculations, and the above two functions
cannot be directly calculated, the partial derivative matrix is introduced into the function:
h
H (i) ˆ (3)
X X (i 1|i 1),a (i 1)
g
G(i) ˆ (4)
X X (i|i 1)
We combine formulas (3) and (4) with the observed value of the target state in the t 1 period.
We predict the state of the target in the cycle t :
Xˆ (t | t 1) h( Xˆ (t 1| t 1), a (t 1, 0) (5)
F (t | t 1) H (t ) F (t 1| t 1) H (t ) ' (6)
On this basis, the status of the current cycle is updated:
Xˆ (t | t ) Xˆ (t | t 1) T (t )(Y (t ) g ( Xˆ (t | t 1), 0)) (7)
F (t | t ) (T (t )G (t ) F (t | t 1) (8)
It can be seen that the target motion state function is a linear matrix. In the process of actually
predicting the football's direct free kick, the goal's initial state is constructed by visually
observing the position of the first two cycles. Iterative operations are carried out in three
directions to realize the estimation of the current period of football's motion state. In the
above calculation process, it should be noted that the basis of the calculation is that the
motion state has been given and the state value has been fixed. Under such conditions, all
position observation information in the current trajectory needs to be saved in the actual
calculation [6]. This ensures that a state estimation operation is performed on the entire
trajectory again when a new state value appears.
2.3 Football trajectory prediction
Adaptive IMM is a multi-model algorithm. This algorithm effectively controls the number of
parallel filters while maintaining information exchange. The algorithm realizes the joint
prediction of the target through multi-information fusion [7]. The steps of the IMM adaptive
algorithm are information exchange, parallel filtering, and information fusion. Because the
estimated football state is linear, we control the number of parallel filters of the IMMApplied Mathematics and Nonlinear Sciences (aop) (aop) 1–6
algorithm to N. The final state estimate is the sum of multiple state estimates. Then the
posterior probability density function of the state estimate is:
N
p ( x (t ) | wt ) p ( x (t ) | o(t ) i,wt ) p (o(t ) i | wt ) (9)
i 1
i (t ) p (o(t ) i | y t ) (10)
i (t ) represents the probability of target i . In the adaptive IMM algorithm, the number of
control parallel filters is changed from N t to i . At this time, the posterior probability density
function for calculating the state estimate of the target i is:
t p( w(t ) | x(t ), o(t ) i, wt 1 )
p( x(t ) | o(t ) i, w ) t 1
p( x(t ) | o(t ) i, wt 1 ) (11)
p( w(t ) | o(t ) i, w
Calculate the predicted probability of target i according to the above formula:
N
i (t | t 1) p (o(t ) i | y t ) p (o(t ) i | o(t 1) j ,wt 1 ) p (o(t 1) j | wt 1 ) (12)
i 1
The calculated predicted probability is the mixed probability of the target state jump. Based
on the known probability, we use the calculated mixed state estimation value of the moving
target and its covariance as the input value of filter j . In this way, the predicted mean,
variance, and filter gain are calculated [8]. Calculate the probability of target i through the
likelihood function at time t . We weighted all the results based on the state estimate of the
moving target and its covariance estimate to get the state estimate and its covariance at time t .
This completes the update of the model probability.
3. Experimental research
In the experiment, to fully verify the performance of the proposed football direct free kick
running trajectory prediction model. We compare the performance of the designed prediction
model and two traditional prediction models and analyze the gap between the three. In the
experimental study, we use process noise to simulate the inaccuracy of modeling. The process
noise figure x simulates the modeling noise, and the intensity of the modeling noise is
controlled by adjusting the size of the noise figure. In this way, the running target is tracked
and predicted [9]. Calculate the RMSE value of position, velocity, and probability and track
offset according to the tracking and prediction results.
3.1 RMSE experiment and analysis
Regardless of the designed predictive model or the traditional predictive model, the model
switching threshold needs to be set in advance. Therefore, in the experiment, the
performance of different algorithms is verified by changing the value of the model switching
threshold. Let the process noise figure be 10 2 . The model switching threshold value
range is as follows:
{0.4, 0.5, 0.6, 0.7, 0.8, 0.9,1.0} (13)
We use different predictive models to track the operating targets. Multiple simulations are
performed whenever the model switching threshold takes a different value, multiple
simulations are performed, and the RMSE peak values of different models under different
model switching thresholds are calculated. The calculation results are shown in Table 1.
Table 1. RMSE calculation results of each model under different model switching thresholds.
Model Peak Speed Probabilisti
switching position RMSE c RMSE
threshold RMSE peak peak
Firefly ζ=0.4 18.769 7.5207 1.304Applied Mathematics and Nonlinear Sciences (aop) (aop) 1–6
Algorithm ζ=0.6 17.676 6.8495 1.257
ζ=0.8 16.502 6.2368 1.198
ζ=1.0 15.571 5.8992 1.151
Kalman filter ζ=0.4 15.264 8.325 1.524
algorithm ζ=0.6 14.267 7.256 1.364
ζ=0.8 13.514 6.361 1.232
ζ=1.0 12.368 5.921 1.129
Adaptive IMM ζ=0.4 9.21 1.261 0.414
algorithm ζ=0.6 8.64 1.194 0.338
ζ=0.8 7.23 1.026 0.206
ζ=1.0 6.04 0.925 0.114
It can be seen from Table 1 that the RMSE value of each parameter of the prediction model
has different changes under different model switching threshold conditions. As the model
switching threshold increases, the RMSE value of each parameter is gradually decreasing.
Therefore, it can be seen that when the model switching threshold is 1, the RMSE value of the
prediction model is the lowest, and the model performance is the best [10]. The article
compares the RMSE peak values of the parameters of each model on the condition that the
model switching threshold is 1. The position RMSE peak value, velocity RMSE peak value,
and probability RMSE peak value of the prediction model based on adaptive IMM designed
in this paper are lower than the other two groups. And when the model switching threshold is
different, the three are always kept at a low level.
3.2 Trajectory migration experiment and analysis
According to the results displayed above, it can be seen that the RMSE calculation results of
each model are more reliable when the model switching threshold 1.0 is reached.
Therefore, in the trajectory deviation angle experiment, the model switching threshold
1.0 is used as the condition to test the mastery of different prediction models on the
trajectory of the football direct free kick. The simulated football trajectory is shown in Figure
1.
Figure 1 The original trajectory of the target
The experimental results of each prediction model obtained based on the original trajectory of
the football goal shown in Figure 1 are shown in Figure 2 below. From the results in Fig. 2(a)
and Fig. 2(b), it can be seen that there is a relatively large deviation in the trajectory traced by
the traditional prediction model. The results are shown in Figure 2(c) is consistent with the
actual trajectory. Combined with the RMSE calculation results, it can be seen that theApplied Mathematics and Nonlinear Sciences (aop) (aop) 1–6
designed soccer direct free kick trajectory prediction model based on adaptive IMM has a low
RMSE value and small trajectory offset when tracking the target. This shows that the
performance of the model is better than the traditional predictive model.
Figure 2 Trajectory angle tracking results of three different prediction models
4. Conclusion
This paper mainly studies and designs a football direct free kick trajectory prediction model
based on adaptive IMM. Based on the video data of direct free-kicks in football, the running
characteristics of free kicks are studied. At the same time, we predict the trajectory of a
football free kick based on its characteristics and running status. After the design is completed,
several comparative experiments are designed to deal with the problems in the traditional
prediction model. The experimental results verify the reliability of the designed prediction
model. At the same time, the experiment also proved that the model could effectively solve
the problems of traditional prediction models. This provides a theoretical basis and support
for improving football players' direct free kick skills in the future.
References
[1] Liebermann, R. C. Reminiscences of Days as an Undergraduate at Caltech in the 1960s: Geology, Student
Body Politics and Intercollegiate Football. International Journal of Geosciences.,2021; 12(8): 653-666
[2] Hostrup, M., Gunnarsson, T. P., Fiorenza, M., Mørch, K., Onslev, J., Pedersen, K. M., & Bangsbo, J.
In‐season adaptations to intense intermittent training and sprint interval training in sub‐elite football
players. Scandinavian journal of medicine & science in sports.,2019; 29(5): 669-677
[3] Brook, S. L. An estimation of NCAA Football Bowl Subdivision demand as a two‐part tariff. Managerial
and Decision Economics., 2019;40(1): 79-83
[4] Macdonald, B., McAleer, S., Kelly, S., Chakraverty, R., Johnston, M., & Pollock, N. Hamstring
rehabilitation in elite track and field athletes: applying the British Athletics Muscle Injury Classification in
clinical practice. British journal of sports medicine.,2019; 53(23): 1464-1473
[5] Francini, L., Rampinini, E., Bosio, A., Connolly, D., Carlomagno, D., & Castagna, C. Association between
match activity, endurance levels and maturity in youth football players. International journal of sports
medicine., 2019;40(09): 576-584
[6] Smith, H., Closser, A. H., Ottmar, E., & Arroyo, I. Developing Math Knowledge and Computational
Thinking Through Game Play and Design: A Professional Development Program. Contemporary Issues in
Technology and Teacher Education.,2020; 20(4): 660-686
[7] Slade, P., & Tolhurst, T. Job Security and Risk‐Taking: Theory and Evidence From Professional Football.
Southern Economic Journal.,2019; 85(3): 899-918
[8] Aghili, A. Complete Solution For The Time Fractional Diffusion Problem With Mixed Boundary
Conditions by Operational Method. Applied Mathematics and Nonlinear Sciences.,2021; 6(1): 9-20
[9] de Assis, R., Pazim, R., Malavazi, M., Petry, P., de Assis, L. & Venturino, E. A Mathematical Model to
describe the herd behaviour considering group defense. Applied Mathematics and Nonlinear Sciences.,2020;
5(1):11-24
[10] Lago, I., Lago‐Peñas, C., & Lago‐Peñas, S. Decentralization and football. Social Science Quarterly.,2019;
100(1): 163-175You can also read

















































