Investigation into the Time Varying Mass Effect on Airship Dynamics Response
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exposition AIAA 2009-735
5 - 8 January 2009, Orlando, Florida
Investigation into the Time Varying Mass Effect on
Airship Dynamics Response
Jayme Waishek ∗ and Atilla Dogan †
Department of Mechanical and Aerospace Engineering
University of Texas at Arlington, TX 76019
Yasmina Bestaoui ‡
Laboratoire IBISC, Universit d’Evry, 91025 EVRY, France
This paper addresses the significance of airship time varying inertia properties due to fuel
consumption on the airship dynamic behavior. First, a new set of nonlinear, 6–DOF airship
equations of motion which include the effect of time-varying mass and inertia properties
associated with fuel consumption, as well we wind effect, are developed. Since the Center
of Mass (CM) of the airship is time–varying during flight, the equations are written in a
reference frame whose origin is at the airship Center of Volume (CV). The dynamic effects
due to fuel consumption are modeled by considering the mass change to be confined to
a finite number of lumped masses, which would normally represent the fuel tanks on the
airship. Once the fuel consumption begins, by using the design parameters such as the
shape, size and location of the individual fuel tanks and the rate of fuel being consumed
from each of them, the mass and location of the individual lumped masses are calculated
and fed into the equations of motion as exogenous inputs. The simulation results obtained
both with and without the time varying mass terms in the equations of motion, with and
without the effect of a prevailing wind, are compared to determine the significance of the
fuel consumption to the airship dynamic response.
I. Introduction
Since the resurgence of lighter-than-air vehicles (a.k.a. airships, dirigibles) in the early 1990’s, they have
been increasingly considered for varied tasks involving transportation, surveillance, freighting, advertising,
monitoring, research, and military roles. They are safe, cost-effective, durable, environmentally benign,
and simple to operate, which makes them suitable for a wide range of applications and attractive to many
varied customers. For example, in December of 2005, Lockheed Martin corporation was awarded a five-year
contract worth 149 million dollars to build a prototype unmanned airship that would remain geostationary
at a near space altitude of about 60000 feet.1 The military has been exploring possible uses of near space
vehicles because they are far less expensive to launch and operate than satellites. In 2006, a Zeppelin
NT-07 aided traffic management at the World Cup Football in Germany, equipped with specially adapted
cameras and computers to gather data to assist in traffic management. Data were processed in real time
on board the airship using specially developed software to provide an overall picture of the traffic situation.
As an example concerning airship surveillance operations, the undoubted success of the US Navy airships
in maritime surveillance operations during and after World War II established a role for airships which
has continued to be fulfilled by contemporary vehicles. The trend towards smaller and lighter sensors for
airship UAV mean that they are becoming more effective in a surveillance role, which is particularly useful
to environmental, biodiversity, and climatological research and monitoring. Airships offer the advantage of
quiet hover with noise levels much lower than helicopters.
∗ StudentMember AIAA, Graduate Student.
† Senior
Member AIAA, Assistant Professor.
‡ Member AIAA, Associate Professor.
1 of 19
Copyright © 2009 by Atilla Dogan. Published by the AmericanAmerican
Institute of Institute
Aeronauticsofand
Aeronautics
Astronautics,and
Inc.,Astronautics
with permission.The method by which airships achieve levitation is the employment of a lifting gas (i.e. helium or hot
air) to exploit Archimedes’ principle in the same manner as a balloon. The difference between airships
and balloons is that balloons simply follow the direction of the winds, whereas airships employ propulsion
and steering. Nonrigid airships or pressure airships are currently the most common variety. From a basic
standpoint, these airships are simply large balloons having shapes which are maintained by their internal
overpressure. The only solid parts are the gondola, the propellers (a pair of propellers mounted at the
gondola and a tail rotor with horizontal axis of rotation) and the tail fins. The envelope holds the helium
that makes the airship lighter than air. In addition to the lift provided by helium, moving airships derive
aerodynamic lift from the shape of the envelope, which is most commonly an ellipsoid. This shape exhibits a
highly aerodynamic profile with good resistance to aerostatic pressures. Like the helicopter, airships possess
different properties depending on their flight modes. The approach and landing, ground maneuvering, and
masting phases of flight demand the highest degree of control precision. However, the control system must
be robust enough to accommodate the airship’s susceptibility to gusts, thermals, and mass variance, as
well as its inherent aerodynamic instability and loss of aerodynamic control at low airspeeds. The problems
associated with gust and mass variance sensitivity and aerodynamic instability are fundamental to ellipsoidal
airships.
Mass properties of a system will vary when mass transfer into or out of the system occurs or mass distribu-
tion within the system changes. Variable mass systems are studied extensively in the area of space flight,2–8
which show the significance of the mass transfer effect on vehicle dynamics. The system of rotorcraft with
external load9 and the Concorde supersonic airline with weight distribution changed by moving fuel10–12 are
examples of systems in which mass changes location. Other examples are space and underwater vehicles13–15
where shape change actuation or moving internal masses are used for control. In the case of aerial refueling,
fuel transferred to the receiver aircraft brings in momentum and changes its inertia properties.16, 17 In this
work, the equations of motion for the airship are derived considering the system of the airship and the fuel
before and after being transferred out of the aircraft. This yields a generic mathematical model that includes
the dynamic effect of mass loss.
The purpose of this paper will be to simulate, and compare the resulting airship behavior when affected
by the time varying mass effect of fuel burn-off. A simulation environment with airship equations of motion
derived both with and without the time-varying mass terms present will be used. The the resulting airship
simulation results will be compared to determine the true significance of the time varying inertial properties
on the airship dynamic behavior. Additional simulation cases are presented to show the response of the
airship to a wind encounter, as modeled by the equations derived herein. The equations of motion presented
herein are adapted from the more general set of equations of motion for an aircraft having both time varying
mass properties and experiencing a wind effect, which were previously derived for the receiver aircraft in an
aerial refueling scenario.16, 17
II. System Modeling
In order to interpret the airship equations of motion, it is important to understand the system modeling
foundation used during the development of the original equations16, 17 which were adapted to the airship
scenario. To begin with, it was necessary to define the airship body frame in such a way that the motion
of the airship Center of Mass (CM) due to fuel burn-off could be accounted for. This is accomplished by
defining the origin of the airship’s body frame (BA -frame) at the location of its Center of Volume (CV), with
a vector denoted ρCM from the origin of the body frame to the location of rigid body empty CM.
There are two frames involved in the dynamics modeling: (i) inertial frame [Î] and (ii) the airship’s body
frame [B̂ A ]. To transform all the vectors and their representations written in the most convenient frames to
the frame in which the equations of motion are written, the rotation matrices defined between the vectrices
of each pair of the frames will be used. Note that all matrices in this paper are written in bold font. For
example, the relationship between the vectrices of the inertial frame and BA -frame is
[B̂ A ] = RBA I [Î] (1)
where RBA I is the rotation matrix from the inertial frame to BA -frame.
The dynamic model of the airship is adapted from a previous work in which the dynamics of an airplane
undergoing aerial refueling are modeled.16, 17 Due to fuel transfer in refueling, the airplane is a system of
varying mass just like the airship experiencing fuel depletion. Thus, Newton’s Second Law, which states
2 of 19
American Institute of Aeronautics and Astronauticsthat force is equal to the time rate of change of momentum, is not directly applicable. However, it can be
applied to a system of varying mass by examining the same mass for a change in momentum at two instants
of time.18 As in the aerial refueling case, this approach is used in this paper by defining a system of constant
mass consisting of the airship and the fuel to be burned at each of the airship’s engines in a given time
interval. The momenta of this system at time instants t − ∆t and t, before and after clusters of fuel particles
are removed from the airship by the engines, are used to determine the time rate of change of momentum
while consuming fuel.
To facilitate the derivation of the dynamics equations including the effect of fuel transfer, “the aircraft
- fuel system” is considered, at time t − ∆t, to comprise four parts as (i) solid, (ii) fuel about to enter or
exit the aircraft, (iii) fuel in transition between entrances/exits and fuel tanks, and (iv) fuel in fuel tanks.
The solid part is considered rigid and represented by ‘n’ particles with constant masses, Mi (i = 1, ..., n),
at fixed positions in the the BA frame denoted by ρi . The “fuel in fuel tanks” is represented by k lumped
masses concentrated at the CM of fuel in each fuel tank at a given time. Thus, the mass of fuel in the j th
fuel tank, mj (j = 1, ..., k), and its position relative to the BR -frame, ρm , are time-varying during refueling
j
or fuel consumption.
Consider that, in general, the aircraft has ‘p’ fuel entrance/exit ports and ‘k’ fuel tanks. Fuel can
transition between every port and every tank through fuel pipes. The “fuel in transition” through the fuel
pipes is represented by p × k trains of particles. The train between the j th fuel tank and the lth fuel port
has ‘hjl ’ particles, and each particle has a mass of mjlf + ∆mjlf (f = 1 . . . hjl ) at ρm moving through the
jlf
fuel pipe. The “fuel about to enter/exit the aircraft” at the lth fuel port, at the fixed location ρcl in the BA
frame is considered to be a cluster of ‘k’ particles, one per fuel tank, with mass ∆mjl0 . Note that the total
Pk
fuel mass “about to enter/exit the aircraft” at the lth fuel port is j=1 ∆mjl0 . Let V 0l be the velocity of
the fuel at the lth fuel port.
The linear momentum of the system at time t − ∆t is
Xn k
X Xp hjl
X
P1 = Mi ṙi + mj ṙmj + (mjlf + ∆mjlf ) ṙmjlf + ∆mjl0 V 0l (2)
i=1 j=1 l=1 f =1
During this time, the cluster of ‘k’ particles at the lth fuel port splits into k particles, each with mass ∆mjl0
(j = 1, . . . , k) and joins the jlth train at the fuel port side. This means that ∆mjl0 joins mjl1 . Concurrently,
∆mjl1 leaves mjl1 and joins mjl2 , with the other ∆mjl(f −1) particles similarly cascading down the train
toward the j th fuel tank. At time t, the last particle at the fuel tank side of the jlth train at t − ∆t,
∆mjlhjl , joins mj in the corresponding fuel tank. This description is obviously more appropriate for the
aerial refueling case. However, it can be directly adapted to fuel consumption by simply reversing the
movement of the particles. Based on this description, the linear momentum of the system at time t is
¢³ ´
n k p hjl
p X
X X X X ¡
P2 = Mi (ṙi +∆ṙi )+ (mj + ∆mjlhjl )(ṙmj + ∆ṙmj ) + mjlf + ∆mjl(f −1) ṙmjlf + ∆ṙmjlf
i=1 j=1 l=1 l=1 f =1
(3)
The limit of P 2 − P 1 as ∆t goes to zero yields the time rate of change of momentum of the system at time
t as
Xn Xk Xp Xhjl h i X p
¡ ¢
Ṗ = Mi r̈i + ṁj ṙmj + mj r̈mj + ṁjl(f −1) − ṁjlf ṙmjlf + mjlf r̈mjlf − ṁl V 0l (4)
i=1 j=1 l=1 f =1 l=1
Pk Pp
where ṁl = j=1 ṁjl0 , the fuel mass flow rate at the lth fuel port, and ṁj = l=1 ṁjlhjl is the fuel mass
flow rate into/from the j th fuel tank.
The fourth and fifth terms on the right hand side of this equation (summation over f ) require the
specification of fuel flow through the pipelines, which is not practical in the case of this work. However, the
following assumptions reduce the equation to a form that can be easily implemented in dynamic simulation.
With the assumption of steady fuel flow, i.e. ṁjl(f −1) = ṁjlf = ṁl for all f = 1, . . . , hjl , the fourth term
becomes zero. This implies that mjlf are time-invariant as the same amount of mass joins and leaves the
3 of 19
American Institute of Aeronautics and Astronauticsclusters simultaneously. Alternatively, in any practical aerial refueling case, the total amount of mass that
occupy the fuel pipes and its corresponding momentum should be very small relative the the sum of the
masses of the empty aircraft and the fuel in the fuel tanks. Thus, the terms with summation over f can
be ignored. In such a case, Eq. (4), which is the translational dynamics equation of the receiver aircraft,
becomes
Xk ³ ´ X p
F = Mr̈BR + ṁj ṙmj + mj r̈mj − ṁl V 0l (5)
j=1 l=1
Pk Pp
where ṁ = j=1 ṁj = l=1 ṁl is total mass change rate, with a negative assigned value denoting mass
loss and F is the total external force acting on the airship.
III. Equations of Motion
The airship equations of motion are derived from previously developed16, 17 general equations of motion
in matrix form for an aircraft experiencing mass transfer and wind effect, derived relative to the tanker’s
body frame. The equations are simplified from their original versions to be written relative to an inertial
frame. Another difference is that the references16, 17 have the body frame origin at the CM of the aircraft
rigid body particles, while the airship origin is at its CV.
A. Translational Motion
To consider the wind effect, the translational kinematics of the airship is written as
ṙBA = RT
BA I UA + W (6)
where ṙBA is the representation of the velocity vector in the inertial frame, and UA is the representation in
the body frame of the velocity vector of the airship relative to the surrounding air, which is expanded as
UA = [u v w]T (7)
where u, v, and w are the airship velocity components in its body x-, y-, and z-directions. Additionally, the
vector W is the representation of the local wind velocity in the inertial frame, expanded as
W = [W x W y W z]T (8)
The translational dynamics Eq. (5) is written in matrix form using the representations of vectors and
rotation matrix following the procedure from the references16, 17 as
h i
(M + m)U̇A = (M + m) S(ωBA )UA − RBA I Ẇ
+ RBA I F − M S2 (ωBA )ρCM − M S(ρCM )ω̇BA
k
X £ ¤
− ṁj −S(ωBA ) ρmj + ρ̇mj
j=1
k
X © ª
− mj S(ρmj ) ω̇BA + S2 (ωBA ) ρmj + ρ̈mj
j=1
k
X p
X
£ ¤
− 2 mj −S(ωBA ) ρ̇mj − S(ωBA ) ṁl ρcl (9)
j=1 l=1
where ωBA is the angular velocity vector of the airship relative to the inertial frame and S(ωBA ) is the
skew-symmetric form of ωBA . Recall that V0l in Eq.(5) is the velocity of fuel flow relative to the inertial
frame. In the derivation of the above equation, the fuel velocity at the fuel port relative to the BA frame is
assumed to be zero.
4 of 19
American Institute of Aeronautics and AstronauticsWhen the fuel consumption is not considered and the fuel is treated as part of the rigid airship of constant
mass, mj = ṁj = ṁl = 0 and ρmj = 0 for all time. For this special case, Eq. (9) reduces to
1
£ ¤
U̇A = S(ωBA ) UA + S(ωBA ) W − Ẇ + (M +m) RBA I F − M S2 (ωBA )ρCM − M S(ρCM )ω̇BA (10)
There are several significant remarks based on the derivation of Eq. (9). First, note that the terms
containing ṁj and ṁl represent the effect of time-varying mass on the translational dynamics of the airship.
For the fuel burn-off scenario, the rate of mass change can be approximated as equal to the negative magnitude
of the total fuel transfer rate out of all the individual fuel tanks or out of all the fuel ports. This modular
formulation allows us to simulate asymmetric fuel burning conditions more effectively. Furthermore, in
our model, both ṁl and ṁj can be time-varying functions, thereby enabling us to study the effects of
any combination of unsteady and asymmetric fuel consumption. In fact, the relationship between thrust
generated by the engines and fuel burn rate can easily be modeled. In practice, the values of ṁj , ρmj , ρ̇mj
and ρ̈mj in Eq. (9) depend on the shape, size and location of the fuel tanks on the airship and also the
individual rates of fuel flow out of each of its fuel tanks. Second, the explicit dependency of the translational
motion of the airship on its rotational dynamics states and their time derivatives can be seen through the
terms containing ωBA and ω̇BA in Eq. (9).
Third, the resultant force acting on the airship, (F , in Eq. (9)) is considered to be the sum of the
gravity force vector F G , the aerodynamic force vector AA , and the propulsive force vector P A . Thus, F
(representation in the inertial frame), in terms of FG (representation in the inertial frame), AA (representation
in the body frame), and PA (representation in the body frame), is
F = FG + RT T
BA I AA + RBA I PA (11)
In general, the representation of the force vector F G is
0
FG = 0 (12)
((M + m) − (ρ∆ V ))g
where (M +m)g is the force caused by the total airship weight and −ρ∆ V g is the buoyant force of the airship
as described by Archimedes’ Principle. Herein, ρ∆ is the difference between the density of the air and of the
helium within the airship envelope, and V is the envelope volume.
B. Rotational Motion
The rotational motion of the airship is analyzed with respect to the inertial frame in a manner similar to
the translational motion. The rotational kinematics equations is determined to be
RBA I ṘT
BA I = −S(ωBA ) (13)
where ωBA is the representation of the angular velocity vector of the airship relative to the inertial frame
and can be expanded as as
ωBA = [p q r]T (14)
and matrix S(ωBA ) in Eq. (13) is obtained based on the skew-symmetric matrix operation.
The derivation of the equation of rotational dynamics of the airship including the effect of total mass
change, change in the position of the airship’s CM and the wind effect, in matrix form, is likewise ac-
complished by simplifying the more general previously developed16, 17 equation to be written relative to
the inertial frame. The more general equation was derived in a manner which parallels the translational
dynamics approach. By this approach, the airship rotational dynamics equation is determined to be
It ω̇BA = MBA + S(ωBA )IM (ωBA ) + M S(ρCM )[−S(ωBA )UA + U̇A + RBA I Ẇ ]
k
X h i
T
+ S(ρmj ) mj ωB A
ρ m j ωBA + m j ρ̈ m j + ṁ j ρ̇ m j
j=1
5 of 19
American Institute of Aeronautics and Astronautics
Xk n o
+ S(ρmj ) mj − S(ωBA )UA + U̇A + RBA I Ẇ
j=1
Xk
+ S(ρmj ) ṁj (UA + RBA I W )
j=1
k
X h³ ´ i
− 2 mj ρTmj ρ̇mj I3×3 − ρ̇mj ρTmj ωBA
j=1
k
X h³ ´ i
− ṁj ρTmj ρmj I3×3 − ρmj ρTmj ωBA
j=1
p
X £¡ T ¢ ¤
+ ṁl ρcl ρcl I3×3 − ρcl ρTcl ωBA
l=1
" p
#
X
− ṁl S(ρcl ) (UA + RBA I W ) (15)
l=1
where IM is the inertia matrix of the rigid (time-invariant mass) portion of the airship with respect to the
origin of the BA frame, expressed by
n
X
IM = Mi [(ρTi ρi )I3×3 − (ρi ρTi )] + M [(ρTCM ρCM )I3×3 − (ρCM ρTCM )] (16)
i=1
and It is the total inertia matrix, expressed by
X k h³ ´ i
4
It = IM + mj ρTmj ρmj I3×3 − ρmj ρTmj (17)
j=1
In this equation, all the variables are with respect to the body frame of the airship. When the rotational
dynamics is represented in this form, it seems quite complicated. However, it is very suitable for this
application. The inertia and mass properties of the airship with empty fuel tanks can be directly used in the
equation. Effect of the fuel consumption on the rotational dynamics is represented by the mass variation
and motion of the lumped masses in the body frame of the airship. In the case of multiple fuel tanks,
the effect of fuel flow out of each tank can be taken into account separately. Since the equation is written
with respect to a point fixed geometrically in the body of the airship, change of the CM during the fuel
consumption is already incorporated in the equation. Another advantage of writing the equation with respect
to a geometrically fixed frame in the body is seen when the aerodynamic variables such as airspeed, angle
of attack and side-slip angle and aerodynamic stability derivatives need to be used. Since these variables
and derivatives are determined by the geometric shape of the aircraft, not its mass properties, the standard
definitions can be directly used without any modification or reinterpretation.
Recall that the external force acting on the airship is due to the sources of (i) gravity, (ii) aerodynamics,
and (iii) propulsion. The total moment of the external forces about the origin of BA -frame can be written
as
M BA = M G + M A + M P (18)
where M G , M A , and M P are the moment vectors due to gravity, aerodynamics, and propulsion, respectively.
Note that the moment due to gravity is not zero since the origin of BA -frame is at the CV of the airship
rather than its CM. Therefore, the gravitational moment is due to the rigid and lumped masses, as well as
the buoyant force in the event that its line of action does not pass through the BA -frame origin, such that
k
X
MG = (ρm × mj G) + ρB × B + ρCM M × G (19)
j
j=1
where G is the vector of the gravitational acceleration and B is the vector of the buoyant force. Let G be
the representation of the G vector in the inertial frame. Thus, G = [0 0 g] where g is the magnitude of the
6 of 19
American Institute of Aeronautics and Astronauticsacceleration due to gravity. Additionally let B be the representation of the B vector in the inertial frame.
Thus, B = [0 0 − ρV g]. Equation (19) is written in matrix form as
k
X
MG = − mj S(ρmj )RBA I G + S(ρB )RBA I B + M S(ρCM )RBA I G (20)
j=1
The aerodynamic and propulsion moment vectors are expanded in Chapter IV.
IV. Added Masses and Inertias
The displacement of the fluid medium contributes to the overall momentum change of a system moving
through that fluid. In the general aircraft case, this momentum change contribution can be ignored because
the mass of the displaced air is insignificant when compared with the mass of the moving body. However,
this is not true for airships, which displace air having roughly the same mass as that of the vehicle. This
results in the required addition of ”added mass” and ”added inertia” terms to the nominal mass and inertia
of the airship when formulating the airship equations of motion.19
The incorporation of the added mass and inertia effects begins by recalling Eq. (11) as
F = FG + RT T
BA I AA + RBA I PA
The aerodynamic force representation, AA , can be expanded as the summation of the body frame aerody-
namic force and the additional forces that are a result of the ”virtual” mass and inertia characteristic of an
aircraft which displaces air of significant mass as
AA = A0 + A1 U̇A + A2 ω̇BA (21)
where A0 is the representation of the aerodynamic force vector in the BA frame, given19 as
1 2£ ¤
AX = ρVa CX1 cos2 α cos2 β + CX2 sin(2α) sin(α/2)
2
1 2
AY = ρV [CY 1 cos(β/2) sin(2β) + CY 2 sin(2β) + CY 3 sin(β) sin(|β|) + 2CY 4 δr ]
2 a
1 2
AZ = ρV [CZ1 cos(α/2) sin(2α) + CZ2 sin(2α) + CZ3 sin(α) sin(|α|) + 2CZ4 δe ] (22)
2 a
where ρ is the air density and Va is the body frame velocity of the airship determined by
p
Va = u2 + v 2 + w2 (23)
Additionally, in the aerodynamic force coefficients of Eq. (22), the angle of attack and sideslip angle are
calculated by
w
α = tan−1
u
v cos(α)
β = tan−1 (24)
u
and δe and δr are the elevator and rudder deflections, respectively. The aerodynamic coefficients CX1 . . . CZ4
are repeated from the reference19 in App. A. The virtual mass matrices are obtained from Lamb parameters
which are refined by wind tunnel experiments to be
1.247 ρ 0.0 0.0
A1 = − 0.0 17.22 ρ 0.0
0.0 0.0 16.67 ρ
0.0 0.0 0.0
A2 = − −1.231 ρ 0.0 −56.89 ρ (25)
0.0 55.27 ρ 0.0
7 of 19
American Institute of Aeronautics and AstronauticsThese virtual mass terms are additional components of axial force owing to virtual mass effects. The
added masses and inertias are the derivatives of the aerodynamic forces and moments with respect to linear
and angular acceleration. After the added masses and inertias are incorporated into the previously derived
equations of motion by substituting Eq. (21) into Eq. (9), the translational dynamics equation becomes
£ ¤
[(M + m)I3×3 − A1 ] U̇A = (M + m) S(ωBA )UA − RBA I Ẇ
+ RBA I FG + A0 + PA − M S2 (ωBA )ρCM
k
X £ ¤
− ṁj −S(ωBA ) ρmj + ρ̇mj
j=1
·X
k ¸ k
X
− mj S(ρmj ) + M S(ρCM ) − A2 ω̇BA − mj S2 (ωBA ) ρmj + ρ̈mj
j=1 j=1
k
X p
X
£ ¤
− 2 mj −S(ωBA ) ρ̇mj − S(ωBA ) ṁl ρcl (26)
j=1 l=1
Likewise, to incorporate the virtual mass and inertia effect into the rotational dynamics, the aerodynamic
moment representation can be expanded as
MA = M0 + M1 ω̇BA + M2 U̇A (27)
When Eq. (27) is substituted back into Eq. (15), the rotational dynamics equation is rewritten as
³ ´
It − M1 ω̇BA = M0 + MG + MP + S(ωBA )IM (ωBA ) + M S(ρCM )[−S(ωBA )UA + RBA I Ẇ ]
k
X h ¡ T ¢ i
+ S(ρmj ) mj ωB A
ρ m j
(ωB A
) + m j ρ̈ m j
+ ṁj ρ̇m j
j=1
Xk Xk n o
+ S(ρmj ) mj + M S(ρCM ) + M2 U̇A + S(ρmj ) mj − S(ωBA )UA + Ẇ
j=1 j=1
Xk
+ S(ρmj ) ṁj (UA + RBA I W )
j=1
k
X h³ ´ i
− 2 mj ρTmj ρ̇mj I3×3 − ρ̇mj ρTmj ωBA
j=1
k
X h³ ´ i
− ṁj ρTmj ρmj I3×3 − ρmj ρTmj ωBA
j=1
Xp
£¡ T ¢ ¤
+ ṁl ρcl ρcl I3×3 − ρcl ρTcl ωBA
l=1
" p
#
X
− ṁl S(ρcl ) (UA + RBA I W ) (28)
l=1
where MG and MP are the representations of the M G and M P vectors in BA -frame, respectively. M0 is the
aerodynamic moment represented directly in BA -frame, and is given19 as
1 2
ML = ρV CL2 sin(β) sin(|β|)
2 a
1 2
MM = ρV [CM 1 cos(α/2) sin(2α) + CM 2 sin(2α) + CM 3 sin(α) sin(|α|) + 2CM 4 δe ]
2 a
1 2
MN = ρV [CN 1 cos(β/2) sin(2β) + CN 2 sin(2β) + CN 3 sin(β) sin(|β|) + 2CN 4 δr ] (29)
2 a
8 of 19
American Institute of Aeronautics and Astronauticswhere the aerodynamic coefficients CL2 . . . CN 4 are repeated from the reference19 in App. A.
The virtual inertia matrices are generated from Lamb parameters which are refined during wind tunnel
experiments to be
13.38 ρ 0.0 3.658 ρ
M1 = − 0.0 311.9 ρ 0.0
3.658 ρ 0.0 316.8 ρ
0.0 −1.231 ρ 0.0
M2 = − 0.0 0.0 55.27 ρ (30)
0.0 −56.89 ρ 0.0
V. State–space Form of the Dynamics Equations
The most general form of the dynamics equations from Eqs. (26) and (28) are
U̇A = f1 ω̇BA + c1 (31)
ω̇BA = f2 U̇A + c2 (32)
where
Xk
f1 = −[(M + m)I3×3 − A1 ]−1 mj S(ρmj ) − A2 + M S(ρCM ) (33)
j=1
½
£ ¤
c1 = [(M + m)I3×3 − A1 ]−1 (M + m) S(ωBA )UA − RBA I Ẇ
+ RBA I FG + A0 + PA − M S2 (ωBA )ρCM
k
X £ ¤
− ṁj −S(ωBA ) ρmj + ρ̇mj
j=1
k
X
− mj S2 (ωBA ) ρmj + ρ̈mj
j=1
k
X p
X ¾
£ ¤
− 2 mj −S(ωBA ) ρ̇mj − S(ωBA ) ṁl ρcl (34)
j=1 l=1
³ ´−1 Xk
f2 = It − M1 S(ρmj ) mj + M2 + M S(ρCM ) (35)
j=1
and
(
³ ´−1
c2 = It − M1 M0 + MG + MP + S(ωBA )IM (ωBA ) + M S(ρCM )[−S(ωBA )UA + RBA I Ẇ ]
k
X h i
T
+ S(ρmj ) mj ωB ρ
A mj
ωBA + m ρ̈
j mj + ṁ ρ̇
j mj
j=1
Xk h i
+ S(ρmj ) mj −S(ωBA )UA + RBA I Ẇ
j=1
9 of 19
American Institute of Aeronautics and Astronautics
Xk
+ S(ρmj ) ṁj (UA + RBA I W )
j=1
k
X h³ ´ i
− 2 mj ρTmj ρ̇mj I3×3 − ρ̇mj ρTmj ωBA
j=1
k
X h³ ´ i
− ṁj ρTmj ρmj I3×3 − ρmj ρTmj ωBA
j=1
p
X £¡ T ¢ ¤
+ ṁl ρcl ρcl I3×3 − ρcl ρTcl ωBA
l=1
" p
# )
X
− ṁl S(ρcl ) (UA + RBA I W ) (36)
l=1
Note that the above set of equations, Eqs. (31) and (32) are not in the standard state–space form, which
is the most convenient for numerical simulation. After some manipulation, these equations become
−1
U̇A = (I3×3 − f1 f2 ) (f1 c2 + c1 ) , (37)
−1
ω̇BA = f2 (I3×3 − f1 f2 ) (f1 c2 + c1 ) + c2 (38)
which are the dynamics equations written in the state-space form and to be used in computer simulations.
VI. Simulation and Results
This section shows how the physical attributes of the airship and its fuel tanks and engines are incorpo-
rated as mathematical quantities in the equations of motion. It also presents the results of the simulation
developed for use with these equations to model an airship’s dynamic behavior. The simulation is based on
the Airspeed Airship AS500, the aircraft data for which can be found in App. A.
A. Fuel Tank and Engine Configuration
Figure 1. The Airspeed Airship AS-500
The AS500 is an under-actuated system having the most popular propulsion system layout for pressurized
non rigid airships. The propulsion system consists of twin ducted main propellers mounted either side of the
envelope bottom as well as a propeller in the tail for torque correction and attitude control. If the thrust
provided by the main envelope propellers in the body frame is denoted as TM with a tilt angle of γ, and
the thrust provided by the tail propeller in the body frame is denoted as TT , then the representation of the
10 of 19
American Institute of Aeronautics and Astronauticsforce vector P A as it appears in Eq. (11) is
PA = PAM + PAT (39)
where PAM is the propulsion force associated with the main propellers and PAT is that associated with the
tail propellers, which are written as
TM cos γ 0
P AM = 0 PAT = TT (40)
TM sin γ 0
where γ is the tilt angle of the main propellers, which tilt simultaneously. The moment due to propulsion
as it appears in Eq (18) is
M P = ρM × P A M + ρT × P A T (41)
where ρM and ρT are the main propeller and tail propeller moment arms in the airship’s body frame,
respectively.
The airship contains a single fuel tank located at (0.95, 0, 1.17) with respect to the BA frame origin, fuel
flow from which is denoted ṁ1 = ṁ. This tank fuels the main and tail engines simultaneously at a rate that
is a linearPfunction of each engine’s throttle. Therefore, the sum of the mass consumed by the main and tail
p
engines, l=1 ṁl , is equal to the total mass change of the single fuel tank. The actual mass of m1 , the fuel
amount left in the fuel tank, at any instant of time can be computed by integrating ṁ1 , a negative number,
over time. With the main propellers providing full thrust, generating the fuel burn rate given in App. A, it
takes the airship fuel tank 10300 seconds to empty.
To determine the position vector of the fuel mass concentrated at the single tank, ρm , recall the assump-
1
tion that fuel in each fuel tank is concentrated at its CM. In general, the initial location ρm (0) is considered
j
to be the CM of the fuel in the fuel tank at the initial time. As the fuel tank mass changes, the vector ρm (t)
j
always points at the CM of the fuel under the assumptions that the fuel tanks are rectangular and the fuel
stays level within each tank. The position vectors ρm along with its first and second time derivatives are
1
used in the airship’s equations of motion.
B. Simulation Results
Simulation results are presented below for several cases. The airship is always initialized at an altitude of
20 meters in a level hover with respect to the ground. Results are shown with the aircraft (i) thrusting to
steady-state, (ii) thrusting to steady-state and deflecting elevator, and (iii) thrusting to steady-state and
encountering wind gust.
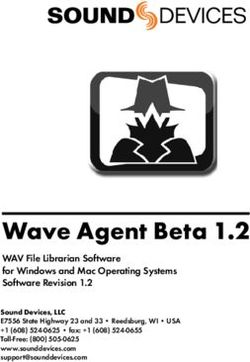
Figures 2 through 4 depict the results of simulations executed in a simple thrust scenario with three
fuel-burn cases as indicated in the figure legends. The ”Normal” case is a thrust scenario in which the
gondola-mounted main propellers provide a constant 20 N of thrust from an initial hover condition. The
”No burn” case is the same, except that the time varying mass effect of fuel burn-off is assumed to be zero
as in Eq. (10). In this case, the mass properties of the airship stay constant at the initial values, which
correspond to a full fuel tank at the ”Normal” location. The ”Aft tank” case is the same as the ”Normal”
case, except that the location of the fuel tank is mirrored across the Y-Z plane to aft of the airship CV. In
each of the normal and aft tank cases, the simulation is run until the fuel tank is half depleted. In all fuel
burn cases, it is assumed that the buoyancy force is adjusted such that it always stays equal to the current
airship weight.
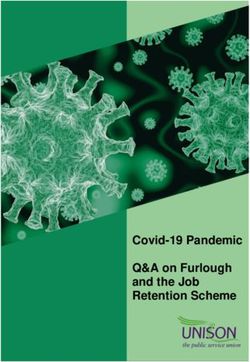
Figure 2 shows that there is a significant attitude time history impact caused by the the airship mass
distribution change associated with fuel burn-off. In the normal case, it can be seen that the aircraft pitches
up by more than 10 degrees as the fuel tank, located slightly forward and below the airship CV, loses half of
its mass over the course of 5000 seconds. This pitch angle increase translates directly into an altitude gain
of approximately 1 × 104 meters over the course of the simulation compared to the case where the fuel burn
effect is ignored, as shown in Fig. 3. Likewise, when the location of the fuel tank is mirrored to behind the
airship CV, an opposite-direction attitude impact and accompanying reduction in altitude increase occurs
over time. Note that, in neither the normal nor the aft tank cases does the airship ever reach a trimmed
steady-state condition since the mass is time-varying throughout. The body axis velocities are presented in
11 of 19
American Institute of Aeronautics and AstronauticsThrust to Steady−State
Yaw [deg] 1
Normal
0 No burn
Aft tank
−1
1000 2000 3000 4000 5000
Pitch [deg]
20
10
0
1000 2000 3000 4000 5000
Time (sec)
1
Bank [deg]
0
−1
1000 2000 3000 4000 5000
time [sec]
Figure 2. Time history of the airship orientation during sustained thrust
Thrust to Steady−State
Normal
x [m]
50000 No burn
Aft tank
0
1000 2000 3000 4000 5000
1
y [m]
0
−1
1000 2000 3000 4000 5000
−10000
z [m]
−20000
−30000
1000 2000 3000 4000 5000
time [sec]
Figure 3. Time history of the airship trajectory during sustained thrust
Fig. 4 for reference of velocities produced by this thrust profile. Velocity components in all three cases are
similar despite the fact that the weight and pitch angle change in the ”Normal” and ”Aft tank” cases. This
can be explained by the fact that aerodynamic characteristics are not affected by weight change, and the
variation of weight components in the body frame as the pitch angle changes is not significant.
Figures 5 through 6 illustrate a scenario in which the airship experiences first a 20 N main thrust, followed
12 of 19
American Institute of Aeronautics and AstronauticsThrust to Steady−State
20
Normal
u [m/s]
10 No burn
Aft tank
0
1000 2000 3000 4000 5000
1
v [m/s
0
−1
1000 2000 3000 4000 5000
0.3
w [m/s]
0.2
0.1
0
1000 2000 3000 4000 5000
time [sec]
Figure 4. Time history of the airship velocity components during sustained thrust
Deflect Elevator
1
Yaw [deg]
Normal
0 No fuel
−1
1000 2000 3000 4000 5000
Pitch [deg]
40
20
0
1000 2000 3000 4000 5000
Time (sec)
1
Bank [deg]
0
−1
1000 2000 3000 4000 5000
time [sec]
Figure 5. Time history of airship orientation during sustained thrust with elevator deflection
by a 10-degree sustained elevator deflection at 500 seconds. Here, the ”Normal” case is the same as that for
Figs. 2 through 4, consisting of a 20 N main thrust with associated fuel burn. This time, however, a ”No
fuel” case is included in which it is assumed that there is no time-varying mass effect, but all of the fuel has
actually been depleted. This is presented as the worst-case comparison between the actual airship behavior
13 of 19
American Institute of Aeronautics and AstronauticsDeflect Elevator
x [m] Normal
50000
No fuel
0
1000 2000 3000 4000 5000
1
y [m]
0
−1
1000 2000 3000 4000 5000
−20000
z [m]
−40000
−60000
1000 2000 3000 4000 5000
time [sec]
Figure 6. Time history of airship trajectory during sustained thrust with elevator deflection
and the behavior encountered when the effects of fuel mass and fuel burn are ignored.
First, it can be seen in Fig. 5 that there is a significant overall difference in pitch angle attributed to the
fact that the forward-located fuel tank in the ”No fuel” case is empty. This effect can also be seen in Fig.
6, where the normal scenario results in a much lower altitude climb and an x-direction displacement that is
longer by 3 × 104 meters. After the elevator is deflected at 500 seconds, it can be seen that the ”No fuel”
case achieves a steady-state attitude quickly while the normal case continues to drift due to the time-varying
fuel mass.
Finally, Figs 8 through 12 present the results of a simulation in which the airship main propellers thrust
at 20 N as before. Fifty seconds into the time range illustrated by the figures, the airship encounters a -10
m/s x-direction wind gust with the profile shown in 7. The ”Normal” and ”No fuel” cases here are the same
as those presented in Figs 5 and 6.
First, Fig. 8 shows that the dip in pitch angle due to horizontal wind gust encounter is slightly greater
in the ”No fuel” case. In Figs. 8 and 9, the same effect attributed to the mass distribution seen in the
”Deflect Elevator” case can be seen in the relationships between the pitch angle and the x- and z-direction
displacements. This is due to the similar effect that the difference in fuel tank mass has on the airship pitch
angle throughout the simulation. In Fig. 10, it can seen that the x-direction wind gust has a much greater
effect on the normal airship airspeed than on the airship modeled without fuel tank mass, as represented by
the first term on the right-hand side of Eq. (26). The components of this velocity change are separated out
in Fig. 11, where both u and w are shown to be affected by the wind and wind derivative. It can also be
seen from Fig. 12 that the pitch rate associated with the gust is more pronounced in the ”No fuel” case,
attributable to the mass and wind / wind derivative relationships present in Eq. (28).
14 of 19
American Institute of Aeronautics and AstronauticsX−Direction Wind Gust
0
−2
Wind [m/s]
−4
−6
−8
20 40 60 80 100
Time [sec]
Figure 7. Time history of airship x-direction wind gust
X−Direction Wind Gust
1
Yaw [deg]
Normal
0 No fuel
−1
0 20 40 60 80 100
Pitch [deg]
40
30
20
20 40 60 80 100
Time (sec)
1
Bank [deg]
0
−1
20 40 60 80 100
time [sec]
Figure 8. Time history of airship orientation during sustained thrust with x-direction wind gust
15 of 19
American Institute of Aeronautics and AstronauticsX−Direction Wind Gust
10000
Normal
x [m]
No fuel
8000
20 40 60 80 100
1
y [m]
0
−1
20 40 60 80 100
−4000
z [m]
−6000
20 40 60 80 100
time [sec]
Figure 9. Time history of airship trajectory during sustained thrust with x-direction wind gust
X−Direction Wind Gust
26
Normal
25 No fuel
Velocity Magnitude (m/s)
24
23
22
21
20
19
20 40 60 80 100
Time (sec)
Figure 10. Time history of airship velocity magnitude during sustained thrust with x-direction wind gust
16 of 19
American Institute of Aeronautics and AstronauticsX−Direction Wind Gust
25
Normal
u [m/s]
No fuel
20
20 40 60 80 100
1
v [m/s
0
−1
20 40 60 80 100
0.4
w [m/s]
0.2
0
−0.2
20 40 60 80 100
time [sec]
Figure 11. Time history of airship velocity components during sustained thrust with x-direction wind gust
X−Direction Wind Gust
1
p [rad/sec]
Normal
0 No fuel
−1
20 40 60 80 100
q [rad/sec]
0.05
0
−0.05
20 40 60 80 100
1
r [rad/sec]
0
−1
20 40 60 80 100
time [sec]
Figure 12. Time history of airship angular velocity components during sustained thrust with x-direction wind
gust
17 of 19
American Institute of Aeronautics and AstronauticsVII. Conclusion and Future Work
A set of equations of motion of an airship is derived to account for time-varying inertia properties due
to fuel depletion and exposure to wind. The airship is modeled so as to allow for mass center shift of the
system during fuel transfer. This allows for time-varying fuel quantity and center of mass for each fuel
tank individually, as well as the specification of fuel tank location, shape, and size. Further, the speed and
direction of fuel flow, as well as the location of the consuming engines, are accounted for. The dynamic
effect of wind exposure appears explicitly in the derived equations of motion. The equations are presented
in matrix form for ease of simulation. This study shows that presence of fuel in fuel tanks and its depletion
over time have a significant impact on the aircraft attitude and position time histories, as well as its gust
response. The impact of fuel depletion on airship dynamic behavior is quantitatively determined to be
significant in any study or development of airship control algorithms. The generic nature of the developed
equations permits the simulation of any type of aircraft at any flight condition with mass transfer or mass
variation of any sort. The main limitations of the equations derived are that the fuel tanks are modeled point
masses and engine consumption is a linear function of throttle. As future work, the effects of mass variation
and wind on the lateral dynamics of the airship will be studied. The mass variation technique presented
here will be used to study the effect of ballonets filled with air for controlling the pressure difference between
the surrounding air and inner gas. The effect of wind gradient over the airship in addition to the temporal
variation studied herein will be modeled.
A. Airship Parameters
M : 18.375 kg
Fuel tank capacity: 1.97 kg
Fuel burn rate: −9.563 × 10−6 kg/(Ns)
Reference area Sref : 2.8352 m2
Reference length Lref : 7.8 m
Volume V : 15 m3
Location of the fueled c.m. ρCM : [0, 0, 0.4032]
Location of the main thruster ρM : [−0.31, 0, 1.1]
Location of the tail thruster ρT : [−3.29, 0, .25]
Inertia Matrix, [kg.m2 ]: Ixx = 3.5976 Iyy = 138.8312 Izz = 138.8312
From the reference:19
CX1 = −0.0789 CX2 = −0.7769 = CY 1 = CZ1 CY 2 = −0.4154 CY 3 = −1.7211
CY 4 = −0.0899 = CZ4 CZ3 = −1.2211 CL2 = 0 CM 1 = 2.2194 CM 2 = −1.4789
CM 3 = −0.4816 CM 4 = −0.1291 CN x = −CM x (42)
References
1 Mayer, N., “Ligher-than-air systems,” Aerospace America, Vol. 12, 2007, pp. 32–33.
2 Rosser, J. B., Newton, R. R., and Gross, G. L., Mathematical Theory of Rocket Flight, McGraw–Hill Book Company,
Inc., 1947.
3 Jarmolow, K., “Dynamics of a Spinning Rocket with Varying Inertia and Applied Moment,” Journal of Applied Physics,
Vol. 28:3, 1957, pp. 308–313.
4 Ellis, J. W. and McArthur, C. W., “Applicability of Euler’s Dynamical Equations to Rocket Motion,” ARS Journal,
Vol. 29:11, 1959, pp. 863–864.
5 Eke, F. O., “Dynamics of Variable Mass Systems with Application to the Star 48 Solid Rocket Motor,” Advances in
Astronautical Sciences, Vol. 54:2, 1984, pp. 671–684.
6 Thomson, W. T., Introduction to Space Dynamics, Dover Publications, Inc., Mineola, NY, 1986.
7 Eke, F. O. and Mao, T. C., “On the dynamics of variable mass system,” International Journal of Mechanical Engineering
Education, Vol. 30:2, 2002, pp. 123–137.
8 Eke, F. O., Mao, T. C., and Morris, M. J., “Free Attitude Motions of a Spinning Body with Substantial Mass Loss,”
Journal of Applied Mechanics, Vol. 71:2, 2004, pp. 190–194.
9 Schierman, J. D., Ward, D., Monaco, J., Hull, J., and Lawrence, T., “On-Line Identification and Nonlinear Control of
Rotorcraft/External-Load Systems,” Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit, Denver,
CO, 14-17 August 2000, AIAA-2000-4042.
18 of 19
American Institute of Aeronautics and Astronautics10 Collard, D., “Future supersonic transport studies at aerospatiale,” SAE (Society of Automotive Engineers) Transactions,
Vol. 99, 1990, pp. 1700–1708.
11 Collard, D., “Concorde airframe design and development,” SAE (Society of Automotive Engineers) Transactions,
Vol. 100, 1991, pp. 2620–2641.
12 Orlebar, C., The Concorde Story, The Hamlyn Publishing Group Limited, London, United Kingdom, 1994.
13 Shen, J. and McClamroch, N. H., “Translational and Rotational Spacecraft Maneuvers via Shape Change Actuators,”
Proceedings of the American Control Conference, Arlington, VA, June 25-27, 2001.
14 Woolsey, C. and Leonard, N., “Moving mass control for underwater vehicles,” Proceedings of the American Control
Conference, Anchorage, AK, May 8-10 2002.
15 Schultz, C. and Woolsey, C., “An Experimental Platform for Validating Internal Actuator Control Strategies,” IFAC
Workshop on Guidance and Control of Underwater Vehicles, Newport, South Wales, U.K., April 2003.
16 Tucker, J., Derivation of the Dynamics Equations of Receiver Aircraft in Aerial Refueling, Master’s thesis, The University
of Texas at Arlington, Arlington, TX, December 2007.
17 Tucker, J., Dogan, A., and Blake, W., “Derivation of the Dynamics Equations of Receiver Aircraft in Aerial Refueling,”
in press for publication in AIAA Journal of Guidance, Control and Dynamics, 2009.
18 Thomson, W. T., Introduction to Space Dynamics, Dover Publication, Inc., 1986.
19 Mueller, J. and Paluszek, M., “Development of an Aerodynamic Model and Control Law Design for a High Altitude
Airship,” AIAA 3rd ”Unmanned Unlimited” Technical Conference, Workshop and Exhibit, Chicago, IL, Sept 2004, AIAA
paper 2004-6479.
19 of 19
American Institute of Aeronautics and AstronauticsYou can also read