Estimating Interference with a Two-Dimensional Viterbi Algorithm for Bit-Patterned Media Recording - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
applied
sciences
Article
Estimating Interference with a Two-Dimensional Viterbi
Algorithm for Bit-Patterned Media Recording
Thien An Nguyen and Jaejin Lee *
Department of Information Communication Convergence Technology, Soongsil University, Seoul 06978, Korea;
anthienng1995@soongsil.ac.kr
* Correspondence: zlee@ssu.ac.kr; Tel.: +82-2-820-0901
Abstract: Bit-patterned media recording (BPMR) is proposed as a candidate for future magnetic data
storage to overcome superparamagnetism. The distance between magnetic islands in BPMR must
be reduced to increase the areal density (AD). As magnetic islands become closer, two-dimensional
(2D) interference is increased, including intersymbol interference (ISI) based on the down-track
direction and intertrack interference (ITI) from the cross-track direction. We propose an estimator
to predict interference from neighboring (upper and lower) tracks. This estimator exploits the 2D
Viterbi algorithm (VA) with reduced states. We removed the interference from the neighboring track
and applied a simple 1D VA to detect the received signal. The simulation results show that our model
performs better than previously proposed models.
Keywords: bit-patterned media recording; channel coding; estimating interference; two-dimensional
Viterbi algorithm (2D VA)
1. Introduction
Citation: Nguyen, T.A.; Lee, J. Mechanisms such as bit-patterned media recording (BPMR) [1], heat-assisted magnetic
Estimating Interference with a recording (HAMR) [2], and 2D magnetic recording (TDMR) [3,4] were developed to increase
Two-Dimensional Viterbi Algorithm the areal density (AD) of magnetic data storage devices. In BPMR, the distance between
for Bit-Patterned Media Recording. magnetic islands must be reduced to increase the AD. As the distance between magnetic
Appl. Sci. 2022, 12, 2156. islands becomes closer, interference between them increases. This is two-dimensional (2D)
https://doi.org/10.3390/app12042156 interference, which comprises intertrack interference (ITI) from the cross-track direction
and intersymbol interference (ISI) from the down-track direction. In addition, the received
Academic Editor: Yutaka Ishibashi
signal is disturbed by track misregistration (TMR) and media noise [5,6]. To combat this
Received: 18 January 2022 interference, error-correcting or detection algorithms are required. As a result, we designed
Accepted: 16 February 2022 an interference-estimation scheme to improve detection.
Published: 18 February 2022 For error-correcting codes, Nguyen and Lee proposed a 9/12 two-dimensional mod-
Publisher’s Note: MDPI stays neutral ulation code to avoid the isolated patterns [7]. To reduce the ITI, a rate-3/4 modulation
with regard to jurisdictional claims in code was proposed by Buajong and Warisarn [8]. To avoid the patterns causing 2D interfer-
published maps and institutional affil- ence, a rate-8/9 2-D modulation code was designed by Kovintavewat, Arayangkool, and
iations. Warisarn [9]. To combat 2D interference, a modified 2D Viterbi algorithm (VA) using 2D
modulation-encoding constraints was proposed by Sokjabok, Warisarn, Koonkarnkhai, and
Lee [10]. For the structure of a staggered BPMR, an error-correcting 5/6 modulation code
was introduced by Nguyen and Lee [11], which helps to correct errors and reduce isolated
Copyright: © 2022 by the authors. patterns in the staggered BPMR. With the same code rate, a rate-5/6 constructive ITI code
Licensee MDPI, Basel, Switzerland. was designed by Kanjanakunchorn and Warisarn to mitigate ITI [12]. With the flexibility
This article is an open access article of a neural network, Jeong and Lee proposed a decoding scheme based on a multilayer
distributed under the terms and
perceptron for BPMR [13].
conditions of the Creative Commons
For detection, Cideciyan et al. introduced a partial-response maximum-likelihood
Attribution (CC BY) license (https://
(PRML) method to convert 2D interference into 1D interference [14], which was subse-
creativecommons.org/licenses/by/
quently developed into a general partial response (GPR) to improve accuracy [15]. To
4.0/).
Appl. Sci. 2022, 12, 2156. https://doi.org/10.3390/app12042156 https://www.mdpi.com/journal/applsciAppl. Sci. 2022, 12, 2156 2 of 13
apply the Viterbi algorithm (VA) for 2D interference, Nabavi et al. proposed a modified VA,
which mitigates the effect of ITI [16]. GPR and MVA were used by Wang and Kumar to
design a hybrid 2D equalizer [17]. Nguyen and Lee developed a feedback scheme for MVA
to improve ITI prediction [18]. To combat ITI with a low implementation cost, Sadeghian
and Barry proposed an effective detection technique in [19]. In addition, Shi and Barry [20]
also proposed a multitrack detector with 2D pattern-dependent noise prediction, which
significantly outperformed a conventional 2D Viterbi detector when the channel noise
was pattern-dependent. Kim and Lee introduced an iterative 2D soft-output VA (SOVA)
for BPMR systems [21]. This scheme was inspired by the 2D SOVA for holographic data
storage systems and designed as a parallel structure of two 1D VA detectors along the
horizontal and vertical directions, respectively [22]. Nguyen and Lee proposed a serial
detection scheme for two 1D VA detectors along the horizontal and vertical directions [23].
In serial detection, the signal is detected by the horizontal detector, and then the output
signal is detected by the vertical detector. Furthermore, a soft output between horizontal
and vertical detection was introduced to improve the performance of serial detection [24].
Because the VA is used to remove 1D interference, the above detection algorithms
are modifications of the VA to handle 2D interference. Thus, we can use the estimator
to convert 2D interference into 1D interference and apply the conventional VA. For ITI
estimation, Buajong and Warisarn used a GPR target to create feedback for a multitrack,
multihead system to estimate ITI [25]. To remove the ITI effect from the desired track,
an ITI cancellation model using the feedback of sidetrack information was proposed by
Koonkarnkhai, Warisarn, and Kovintavewat [26]. In [18], owing to the asymmetrical
target, the authors were able to extract the ITI information. To improve detection on the
center track, Chang and Cruz designed a multitrack detection technique to estimate the
interference from the sidetrack [27]. Recently, Jeong and Lee proposed an ITI estimation
scheme based on a neural network [28] to achieve interference with high accuracy.
In this paper, we propose an ITI estimator that exploits 2D VA. First, we considered
the sum of product between the signal and the interference as the symbols, which can be
detected by 2D VA. After detecting these symbols, we summed the suitable symbols to
estimate the interference from the sidetrack. Then, we removed these interferences from
the received signal to convert 2D interference into 1D interference. The simulation results
show that the ITI information improves the quality of the equalizer output signal and the
performance of the BPMR systems.
The remainder of this study is organized as follows. Section 2 explains the 2D VA
for interference estimation. Section 3 presents the proposed detection model. Section 4
presents and discusses the simulations and results. Finally, Section 5 concludes the study.
2. Estimating Interference with 2D VA
2.1. GPR Target
First, had to determine the GPR target of the BPMR channel, H, to design an appropri-
ate VA detector, which is the main idea of PRML. Figure 1 illustrates the estimation method
for the GPR target during the training process.
Figure 1. Training model for the GPR target and equalizer.Appl. Sci. 2022, 12, 2156 3 of 13
We followed the procedures mentioned in [23,24] to estimate coefficients of the target
and equalizer matrices, G and F, respectively, which can be written as:
g−1,−1 g−1,0 g−1,1
G = g0,−1 g0,0 g0,1 , and (1)
g1,−1 g1,0 g1,1
f −2,−2 f −2,−1 f −2,0 f −2,1 f −2,2
f −1,−2 f −1,−1 f −1,0 f −1,1 f −1,2
F=
f 0,−2 f 0,−1 f 0,0 f 0,1 f 0,2 ,
(2)
f 1,−2 f 1,−1 f 1,0 f 1,1 f 1,2
f 2,−2 f 2,−1 f 2,0 f 2,1 f 2,2
From Equations (1) and (2), the signals d[j,k] and z[j,k] can be achieved as:
1 1
d[ j, k] = ∑ ∑ a[ j − m, k − n] gm,n , and (3)
m=−1 n=−1
2 2
z[ j, k] = ∑ ∑ y[ j − m, k − n] f m,n . (4)
m=−2 n=−2
We defined the vectors as:
T
g = g−1,−1 g−1,0 g−1,1 g0,−1 g0,0 g0,1 g1,−1 g1,0 g1,1 , (5)
T
f= f −2,−2 f −2,−1 f −2,0 f −2,1 ... f 2,−1 f 2,0 f 2,1 f 2,2 , (6)
T
a= a[ j − 1, k − 1] a[ j − 1, k ] a[ j − 1, k + 1] ... a[ j + 1, k − 1] a[ j + 1, k] a[ j + 1, k + 1] , and (7)
T
y= y[ j − 2, k − 2] y[ j − 2, k − 1] y[ j − 2, k] ... y[ j + 2, k] y[ j + 2, k + 1] y[ j + 2, k + 2] , (8)
where T is transpose operator. Based on Equations (5)–(8), Equations (3) and (4) can be
rewritten as:
d[ j, k ] = gT a, and (9)
z[ j, k] = fT y. (10)
To find the parameters of the GPR target G and the equalizer F, we solved the following
optimization problem. 2
argminE fT y − gT a ,
(11)
s.t.ET g = c
where
1 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0
ET =
0 0 0 0 1 0 0 0 0 , and (12)
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 1
T
c= 0 0 1 0 0 . (13)
The solutions to Equation (11) are presented as:
−1 −1
T T −1
λ= E A−T R T E c, (14)Appl. Sci. 2022, 12, 2156 4 of 13
−1
g = A − T T R−1 T Eλ, (15)
g−1,−1 = g−1,1 = g1,−1 = g1,1 = g0,−1 g−1,0 = g0,−1 g1,0 , (16)
f = R−1 Tg, (17)
where λ is a vector containing the Lagrange multipliers, A = R= E{aaT }, E{yyT }; and
T = E{yaT }. With Equations (14)–(17), the GPR target can be achieved as:
t p t
G= r 1 r , (18)
t p t
where r and p are the horizontal and vertical interferences, respectively; and t = rp.
2.2. 2D VA
In BPMR systems, the received signal is disturbed by 2D interference. Therefore, we
needed to remove or mitigate 2D interference into 1D interference to apply 1D VA. In this
section, we introduce 2D VA. Based on the 2D VA, we propose an interference estimator for
converting 2D interference into 1D interference in the next section (Section 2.3).
As shown in Figure 1, the output of the equalizer z[j,k] can be written as:
z[ j, k] =d[ j, k] + wF [ j, k]
1 1 (19)
= ∑ ∑ a[ j − n, k − m] gn,m + wF [ j, k].
n=−1 m=−1
where wF [j,k] denotes the colored noise. By minimizing the mean square error (MSE), we
wF [j,k] can be ignored while analyzing the estimated signal. The interfered signal can be
rewritten as:
1 1
∑ ∑ a[ j − n, k − m] gn,m =
n=−1 m=−1
+ta[ j − 1, k − 1] + pa[ j − 1, k] + ta[ j − 1, k + 1] (20)
+ra[ j, k − 1] + a[ j, k] + ra[ j, k + 1]
+ta[ j + 1, k − 1] + pa[ j + 1, k] + ta[ j + 1, k + 1].
When we compare the target, G, and Equation (20), interference [r 1 r] is from the
main track and interference [t p t] is from the upper and lower tracks. In this study, we
defined [t p t] as ITI, [t r t]T as ISI, [p 1 p]T as vertical interference (VI), and [r 1 r] as
horizontal interference (HI) in G. ITI affects the current symbol based on the symbols in
neighboring (upper and lower) tracks, and ISI affects the current symbol based on the
symbols in neighboring (previous and next) sample times.
Moreover, we defined a vector, v, as follows:
v = v[ j, k − 1], v[ j, k], v[ j, k + 1] , (21)
where
v[ j, k − 1] = ta[ j − 1, k − 1] + ra[ j, k − 1] + ta[ j + 1, k − 1], (22)
v[ j, k] = pa[ j − 1, k] + a[ j, k] + pa[ j + 1, k], and (23)
v[ j, k + 1] = ta[ j − 1, k + 1] + ra[ j, k + 1] + ta[ j + 1, k + 1]. (24)Appl. Sci. 2022, 12, 2156 5 of 13
With the assignments in Equations (22)–(24), the ISI estimator can be designed. Sim-
ilarly, if v is assigned along the horizontal direction, as in Equations (25)–(27), the ITI
estimator can be designed.
v[ j − 1, k] = ta[ j − 1, k − 1] + pa[ j − 1, k] + ta[ j − 1, k + 1]. (25)
v[ j, k] = ra[ j, k − 1] + a[ j, k] + ra[ j, k + 1]. (26)
v[ j + 1, k ] = ta[ j + 1, k − 1] + pa[ j + 1, k ] + ta[ j + 1, k + 1]. (27)
Based on Equations (21)–(24), a trellis can be designed to detect v using VA. Because
the input, a[j,k], is 1 or −1, the values of v can be calculated, as listed in Table 1. Thus, the
trellis has 36 states for [v[j,k − 1], v[j,k]], and each state has six output branches for v[j,k + 1].
Table 1. Results of v, depending on a[j,k], from Equations (22)–(24).
a[j − 1,k − 1]/ a[j − 1,k]/ a[j − 1,k + 1]/
a[j,k − 1]/ a[j,k]/ a[j,k + 1]/ v[j,k − 1] v[j,k] v[j,k + 1]
a[j + 1,k − 1] a[j + 1,k] a[j + 1,k + 1]
−1 −1 −1 −r − 2t −1 − 2p –r − 2t
−1 −1 1
−r −1 −r
1 −1 −1
−1 1 −1 r − 2t 1 − 2p r − 2t
1 −1 1 −r + 2t −1 + 2p −r + 2t
−1 1 1
r 1 r
1 1 −1
1 1 1 r + 2t 1 + 2p r + 2t
2.3. Estimating Interference
After calculating and determining the survivor path (in Section 2.2), the state and input
branch at each step of the survivor path can be identified. The state contains the information of
v[j,k − 1] and v[j,k], and the output branch contains the information of v[j,k + 1]. Therefore, ISI
can be achieved using v[j,k − 1] and v[j,k + 1], and it can be written as:
ISI [ j, k] = v[ j, k − 1] + v[ j, k + 1]. (27)
Considering ISI[j,k] in Equation (28), we subtracted it from the signal, z[j,k], to create a
signal that is only distorted by 1D VI. Then, the VI signal was detected by the 1D VA. Using
Equation (19), the VI signal was derived as follows:
sv [ j, k] =z[ j, k] − ISI [ j, k]
1 (28)
= ∑ a[ j − n, k] gn,0 + wF [ j, k].
n=−1
On the other hand, if v is assigned along the horizontal direction to Equations (25)–(27),
the ITI estimator can be created. Thus, the signal ITI[j,k] can be achieved, and the signal
sh [j,k] can be acquired as follows:
ITI [ j, k ] = v[ j − 1, k] + v[ j + 1, k ]. (30)
1
sh [ j, k] = ∑ a[ j, k − m] g0,m + wF [ j, k]. (31)
m=−1
In the proposed model (in Section 3), the signals ISI[j,k] or ITI[j,k] are the output of the
estimator. If 1D VA is applied according to the vertical direction, the estimator is used withAppl. Sci. 2022, 12, 2156 6 of 13
Equations (28) and (29) to find the ISI[j,k] and remove the horizontal interference. If 1D
VA is applied according to the horizontal direction, the estimator is used with Equations
(30) and (31) to find the ITI[j,k] and remove the vertical interference. ISI[j,k] or ITI[j,k] are
selected according to circumstances of the channel. This is mentioned in the simulation
section (Section 4).
3. Proposed Model
Figure 2 shows the proposed detection model. The original data, u[k] ∈ {0/1}, are
modulated into the signal, a[j,k]∈ {−1/1}, and stored in the BPMR channel, H. This channel
includes 2D interference and Gaussian noise (w[j,k]). The output of the channel y[j,k] goes
through an equalizer, F, to adjust it close to the desired signal, d[j,k]. The parameters of
the equalizer, F, and the target, G, were estimated using the MMSE algorithm during the
training period. The output of the equalizer, F, is z[j,k], which is supplied to the estimator
(using 2D VA) to achieve the ISI[j,k] or ITI[j,k] (depending on the direction mentioned in
Section 2.2).
Figure 2. Proposed detection model.
3.1. BPMR Channel
The readback signal from the BPMR channel suffers from 2D interference and Gaussian
noise and can be written as:
y[ j, k] = a[ j, k] ∗ h[ j, k] + w[ j, k], (32)
where * is the convolution operation; j and k are the discrete indices along the down- and
cross-track directions, respectively; y[j,k] is the readback signal; w[j,k] is additive white
Gaussian noise (AWGN) with zero mean and variance σ2 ; and h[j,k] is the BPMR channel
pulse response, as follows:
h[ j, k ] = P jTx , kTq − ∆o f f , (33)
where P(x, q) is a 2D Gaussian function used to represent the 2D island response of the
BPMR channel, as in [29].
" #!
x + ∆x 2 q + ∆q 2
1
P( x, q) = A exp − 2 + , (34)
2c PWx PWq
where A is the peak amplitude (in this study, A = 1); x and q are the down- and cross-track
directions, respectively; ∆ x and ∆q are the down- and cross-track bit-location fluctuations,
respectively; c is the constant, which represents the relationship between the standard
deviation of the Gaussian function and PW 50 (c = 1/2.3548) [23]; and PWx and PWq are the
PW 50 components of the down- and cross-track pulses, respectively. Finally, we defined
TMR for the BPMR system as
∆o f f
TMR(%) = . (35)
TqAppl. Sci. 2022, 12, 2156 7 of 13
3.2. Detection Scheme
sv [j,k] and sh [j,k] are detected based on the 1D VA algorithm. After detection, the
output of the 1D Viterbi detection is a[j,k], which is similar to the original signal, a[j,k]. Thus,
the signal, a[j,k], can pass through the interference target to regenerate ISI[j,k] or ITI[j,k],
which are the ISI or ITI, respectively, with a higher accuracy compared to ISI[j,k] or ITI[j,k].
ISI [ j, k] = ta[ j − 1, k − 1] + ta[ j − 1, k + 1]
+ ra[ j, k − 1] + ra[ j, k + 1] (36)
+ ta[ j + 1, k − 1] + ta[ j + 1, k + 1].
ITI [ j, k] = ta[ j − 1, k − 1] + pa[ j − 1, k] + ta[ j − 1, k + 1]
(37)
+ ta[ j + 1, k − 1] + pa[ j + 1, k] + ta[ j + 1, k + 1].
Then, either ISI[j,k] or ITI[j,k] is again subtracted from z[j,k] to create a signal with
almost no ISI or ITI, which has only 1D interference (sv [j,k] or sh [j,k]). Finally, either sv [j,k]
or sh [j,k] is detected by 1D VA to restore the original signal, â[j,k].
4. Simulation and Results
For simulation, we generated random data for 10 pages. Each page includes a 1 ×
1,440,000-bits block u[k]. First, u[k] is converted into a[j,k] with a size of 1200 × 1200 bits.
We used the first page to estimate parameters of the GPR target, G, and the equalizer, F,
using the model shown in Figure 1. The remaining pages were applied to the proposed
detection model, as shown in Figure 2, to evaluate the bit error rate (BER) performance. The
BPMR channel was set up with an AD of 3 Tb/in2 (0.465 Tb/cm2 ) (Tx = Tq = 14.5 nm) [30].
In this article, the signal-to-noise ratio (SNR) is definite as SNR = 10log10 (1/σ2 ). First, we
experimented with the proposed model on the BPMR channel without the TMR effect (0%
TMR). The coefficient of the channel, H, is given in [23]. As shown in Figure 2, the ISI
estimator (ISI[j,k] is the output of the estimator) or the ITI estimator (ITI[j,k] is the output of
the estimator) can be used. For the second 1D Viterbi detection, either horizontal or vertical
detection (depending on the interference target). If the ITI target is applied, horizontal
detection is used. If the ISI target is applied, vertical detection is used. Therefore, t there are
four cases, including the combinations of ITI estimator and vertical direction detector (ITI-VD),
ITI estimator and horizontal direction detection (ITI-HD), ISI estimator and vertical direction
detector (ISI-VD), and ISI estimator and horizontal direction detector (ISI-HD).
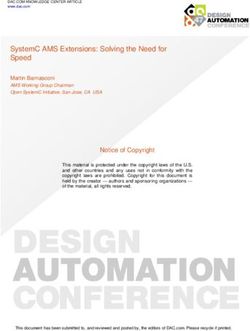
In the first experiment, we determined the best estimator–detector combination for
the proposed model. From Figure 3 shows that the ITI-VD structure has the most favorable
BER. ITI-VD includes the ITI estimator and ISI target. Then second 1D Viterbi detection
was applied to the vertical direction.
Since the ITI component is larger than the ISI in channel, H, of the simulation for the
BPMR, the BER performance of this combination is outstanding compared with the that of
other cases. In addition, based on this experiment, we can see how to choose the estimator
between ITI[j,k] and ISI[j,k]. When the ITI component is larger than the ISI component in
the channel, ITI[j,k] is chosen, and when the ISI component is larger than the ITI component
in the channel, ISI[j,k] is chosen.
We then compared the proposed model with the previous studies in the channel
without TMR effect (∆o f f = 0) and media noise (∆ x = ∆q = 0). The results are presented in
Figure 4.Appl. Sci. 2022, 12, 2156 8 of 13
Figure 3. BER performance of the four combinations of the estimator and detection structures.
Figure 4. BER performance of proposed model [18,24,25,28].
Figure 4 shows that the proposed model with the optimal structure can improve the
gain from 0.5 to 2.5 dB at a BER of 10−4 . For the three-way GPR target with feedback [18],
the model estimates either the upper or lower interference. Our proposed model estimates
both the upper and lower interference. Thus, our proposed model can achieve higher
performance compared to the model in [18]. Comparing the serial soft output [24], our
proposed model removes the interference from the equalized signal. Thus, it preserves the
noise information better than the serial soft output, which estimates noise information by
using the feedback from the hard output. Finally, with the ITI subtraction technique [25]
and estimation with a neural network [28], a general filter to estimate the ITI. For ITIAppl. Sci. 2022, 12, 2156 9 of 13
subtraction technique, the authors used one-layered filter to predict the ITI. For neural
networks [28], a multi-layered filter can be used to predict the ITI. In our proposed model,
we used the 2D VA, which gives a more specific rule to predict the ITI (or ISI). Thus, the
proposed model achieves better optimization compared to the models in [25,28].
Next, we considered the BER performance of the proposed model in the BPMR channel
with the TMR effect (∆o f f 6= 0). We assumed that our model suffers from a 10% TMR. We
compared the proposed model with serial detection [24] and the model used in [18]. The
results are shown in Figure 5. When the TMR effect occurs, the ITI is becomes asymmetric.
However, our proposed model can estimate and compensate for the change in ITI and still
achieve the best performance.
Figure 5. BER performance of the proposed model with 10% TMR [18,24].
To investigate resistance to the TMR effect, we changed the level of TMR from 10% to
30%, with an SNR of 15 dB to compare the BER performance. The results are presented in
Figure 6.
Based on the results in Figures 5 and 6, we can see that the proposed model can achieve
the best performance when the level of the TMR effect is less than 20%. When the TMR
effect is more than 20%, the performance of our proposed model is the same as that of serial
soft output [24]. Therefore, the proposed model can resist a TMR effect of less than 20%.
In the next experiment, we simulated our proposed model on the BPMR channel
with 6% position fluctuation. Figure 7 shows that our proposed model improved the BER
performance compared to the serial soft output in [24] and three-way GPR target with
feedback in [18] with 6% position fluctuation. When position fluctuation occurs, both
ITI and ISI change. However, in this case, the ITI is still larger than the ISI. Therefore,
estimating and compensating for the change in ITI is a major factor for improving the BER
performance. In addition, we simulated according to the degree of position fluctuation,
and the results are shown in Figure 8. We can see that the proposed model can resist
position fluctuation of less than 18%. When the position fluctuation is more than 18%, the
performances of all models converge.Appl. Sci. 2022, 12, 2156 10 of 13
Figure 6. BER performance of the proposed model according to TMR at SNR = 15 dB [18,24].
Figure 7. BER performance of the proposed model with 6% position fluctuation [18,24].Appl. Sci. 2022, 12, 2156 11 of 13
Figure 8. BER performance of the proposed model according to position fluctuation at SNR =
15 dB [18,24].
5. Conclusions
We proposed an interference estimator that uses 2D VA to improve detection perfor-
mance. In our proposed model, we grouped the sums of products between the signal and
the interference into the symbols to apply the 2D VA. In the 2D VA, because each symbol
has six levels, we used a trellis with 36 states and 6 input branches. The detected symbols
were chosen to estimate the ITI or ISI (depending on the directions and the parameters
of the channel). The simulation results show that our proposed model can improve the
performance of previous studies. Especially with the optimal structure, the proposed model
can achieve gains of 0.5 and 2.5 dB at a BER of 10−4 compared to the models in [18,24],
respectively. In addition, the simulation shows that the proposed model can achieve a
better BER performance of serial detection with a TMR effect lower than 20% and a position
fluctuation less than 18%.
In the current research, we exploited the signal from a given direction (horizontal or
vertical directions) to estimate interference (ITI or ISI). Thus, in the near future, we will
develop a model to exploit and combine the information from both directions (horizontal
and vertical).
Author Contributions: Conceptualization, T.A.N. and J.L.; methodology, T.A.N. and J.L.; software,
T.A.N.; validation, T.A.N. and J.L.; formal analysis, T.A.N.; investigation, T.A.N. and J.L.; writing—
original draft preparation, T.A.N.; writing—review and editing, T.A.N. and J.L.; supervision, J.L.;
project administration, J.L.; funding acquisition, J.L. All authors have read and agreed to the published
version of the manuscript.
Funding: This work was supported by the National Research Foundation of Korea (NRF) grant
funded by the Korea government (MSIT) (2021R1A2C1011154).
Institutional Review Board Statement: Not applicable.
Informed Consent Statement: Not applicable.
Data Availability Statement: Not applicable.Appl. Sci. 2022, 12, 2156 12 of 13
Conflicts of Interest: The authors declare no conflict of interest.
References
1. Albrecht, T.R.; Arora, H.; Ayanoor-Vitikkate, V.; Beaujour, J.-M.; Bedau, D.; Berman, D.; Bogdanov, A.L.; Chapuis, Y.-A.; Cushen,
J.; Dobisz, E.E.; et al. Bit-Patterned Magnetic Recording: Theory, Media Fabrication, and Recording Performance. IEEE Trans.
Magn. 2015, 51, 1–42. [CrossRef]
2. Rottmayer, R.E.; Batra, S.; Buechel, D.; Challener, W.A.; Hohlfeld, J.; Kubota, Y.; Li, L.; Lu, B.; Mihalcea, C.; Mountfield, K.; et al.
Heat-assisted magnetic recording. IEEE Trans. Magn. 2006, 42, 2417–2421. [CrossRef]
3. Thompson, D.A.; Best, J.S. ChemInform Abstract: The Future of Magnetic Data Storage Technology. ChemInform 2000, 31.
[CrossRef]
4. Garani, S.S.; Dolecek, L.; Barry, J.; Sala, F.; Vasic, B. Signal Processing and Coding Techniques for 2-D Magnetic Recording: An
Overview. Proc. IEEE 2018, 106, 286–318. [CrossRef]
5. Richter, H.J. The transition from longitudinal to perpendicular recording. J. Phys. D Appl. Phys. 2007, 40, R149–R177. [CrossRef]
6. Sharrock, M.P. Time dependence of switching fields in magnetic recording media (invited). J. Appl. Phys. 1994, 76, 6413–6418.
[CrossRef]
7. Nguyen, C.D.; Lee, J. Elimination of two-dimensional intersymbol interference through the use of a 9/12 two-dimensional
modulation code. IET Commun. 2016, 10, 1730–1735. [CrossRef]
8. Buajong, C.; Warisarn, C. Improvement in bit error rate with a combination of a rate-3/4 modulation code and intertrack
interference subtraction for array-reader-based magnetic recording. IEEE Magn. Lett. 2019, 10, 1–5. [CrossRef]
9. Kovintavewat, P.; Arayangkool, A.; Warisarn, C. A rate-8/9 2-D modulation code for bit-patterned media recording. IEEE Trans.
Magn. 2014, 50, 1–4. [CrossRef]
10. Sokjabok, S.; Warisarn, C.; Koonkarnkhai, S.; Lee, J. Modified 2D Viterbi algorithm using 2D modulation encoding constraints
in BPMR systems. In Proceedings of the 17th International Conference on Electrical Engineering/Electronics, Computer,
Telecommunications and Information Technology (ECTICON), Phuket, Thailand, 24–27 June 2020; pp. 457–460.
11. Nguyen, T.A.; Lee, J. Error-correcting 5/6 modulation code for staggered bit-patterned media recording systems. IEEE Magn. Lett.
2019, 10, 1–5. [CrossRef]
12. Kanjanakunchorn, C.; Warisarn, C. Soft-decision output encoding/decoding algorithms of a rate-5/6 CITI code in bit-patterned
magnetic recording (BPMR) systems. In Proceedings of the 34th International Technical Conference on Circuits/Systems,
Computers and Communications, JeJu, Korea, 23–26 June 2019; pp. 1–4.
13. Jeong, S.; Lee, J. Modulation Code and Multilayer Perceptron Decoding for Bit-Patterned Media Recording. IEEE Magn. Lett.
2020, 11, 6502705. [CrossRef]
14. Cideciyan, R.; Dolivo, F.; Hermann, R.; Hirt, W.; Schott, W. A PRML system for digital magnetic recording. IEEE J. Sel. Areas
Commun. 1992, 10, 38–56. [CrossRef]
15. Nabavi, S.; Kumar, B.V.K.V. Two-Dimensional Generalized Partial Response Equalizer for Bit-Patterned Media. In Proceedings of
the IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007; pp. 6249–6254. [CrossRef]
16. Nabavi, S.; Kumar, B.V.K.V.; Zhu, J.-G. Modifying Viterbi Algorithm to Mitigate Intertrack Interference in Bit-Patterned Media.
IEEE Trans. Magn. 2007, 43, 2274–2276. [CrossRef]
17. Wang, Y.; Kumar, B.V.K.V. Improved Multitrack Detection with Hybrid 2-D Equalizer and Modified Viterbi Detector. IEEE Trans.
Magn. 2017, 53, 1–10. [CrossRef]
18. Nguyen, T.A.; Lee, J. Modified Viterbi Algorithm with Feedback Using a Two-Dimensional 3-Way Generalized Partial Response
Target for Bit-Patterned Media Recording Systems. Appl. Sci. 2021, 11, 728. [CrossRef]
19. Sadeghian, E.B.; Barry, J.R. Soft Intertrack Interference Cancellation for Two-Dimensional Magnetic Recording. IEEE Trans. Magn.
2014, 51, 1–9. [CrossRef]
20. Shi, S.; Barry, J.R. Multitrack Detection with 2D Pattern-Dependent Noise Prediction. In Proceedings of the 2018 IEEE International
Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [CrossRef]
21. Kim, J.; Lee, J. Iterative Two-Dimensional Soft Output Viterbi Algorithm for Patterned Media. IEEE Trans. Magn. 2011, 47, 594–597.
[CrossRef]
22. Kim, J.; Lee, J. Two-Dimensional SOVA and LDPC Codes for Holographic Data Storage System. IEEE Trans. Magn. 2009, 45,
2260–2263. [CrossRef]
23. Nguyen, T.A.; Lee, J. One-dimensional serial detection using new two-dimensional partial response target modeling for bit-
patterned media recording. IEEE Magn. Lett. 2020, 11, 1–5. [CrossRef]
24. Nguyen, T.A.; Lee, J. Effective Generalized Partial Response Target and Serial Detector for Two-Dimensional Bit-Patterned Media
Recording Channel Including Track Mis-Registration. Appl. Sci. 2020, 10, 5738. [CrossRef]
25. Buajong, C.; Warisarn, C. A Simple Inter-Track Interference Subtraction Technique in Bit-Patterned Media Recording (BPMR)
Systems. IEICE Trans. Electron. 2018, E101.C, 404–408. [CrossRef]
26. Koonkarnkhai, S.; Warisarn, C.; Kovintavewat, P. A Novel ITI Suppression Technique for Coded Dual-Track Dual-Head Bit-
Patterned Magnetic Recording Systems. IEEE Access 2020, 8, 153077–153086. [CrossRef]
27. Chang, W.; Cruz, J.R. Inter-Track Interference Mitigation for Bit-Patterned Magnetic Recording. IEEE Trans. Magn. 2010, 46,
3899–3908. [CrossRef]Appl. Sci. 2022, 12, 2156 13 of 13
28. Jeong, S.; Lee, J. Signal Detection Using Extrinsic Information from Neural Networks for Bit-Patterned Media Recording. IEEE
Trans. Magn. 2020, 57, 1–4. [CrossRef]
29. Jeong, S.; Kim, J.; Lee, J. Performance of Bit-Patterned Media Recording According to Island Patterns. IEEE Trans. Magn. 2018, 54,
1–4. [CrossRef]
30. Warisarn, C.; Arrayangkool, A.; Kovintavewat, P. An ITI-mitigating 5/6 modulation code for bit-patterned media recording.
IEICE Trans. Electron. 2015, E98-C, 528–533. [CrossRef]You can also read