Elderly's preferences towards rehabilitation robot appearance using electroencephalogram signal
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35
https://doi.org/10.1186/s13634-021-00757-z
EURASIP Journal on Advances
in Signal Processing
RESEARCH Open Access
Elderly’s preferences towards rehabilitation
robot appearance using
electroencephalogram signal
Xinxin Sun1* and Wenkui Jin2
* Correspondence: sunxinxinde@
126.com Abstract
1
School of Design Arts and Media,
Nanjing University of Science and Rehabilitation robots are becoming an important means of assisted living for the
Technology, Nanjing, China elderly, and the appearance of rehabilitation robots directly affects the willingness of
Full list of author information is the elderly to interact with the robots. Much of the current research on robot
available at the end of the article
appearance preferences relies solely on subjective evaluations, which are relatively
cheap, but do not reach deep into the brain to get an accurate grasp of how
humans respond to robot appearance. Using electroencephalogram signal and
questionnaire survey, we studied the preference of the elderly for abstract and
figurative robots. The experimental materials are derived from the pictures of 10
robots in the market. The electroencephalogram signal are collected by BrainVision
Recorder and processed by BrainVision Analyzer, as well as SPSS statistical analysis.
Experiment shows that the peak of figurative robot pictures is higher and the
fluctuation is more intense from 350 ms to 600 ms in the central region and the
right half of parietal region. While the peak of abstract robot pictures is higher and
the fluctuation is more intense in the prefrontal region, and the difference between
abstract robot and figurative robot is not obvious in the occipital region. Based on
the electroencephalogram signal and experimental results, it provides the possibility
for objective preference evaluation of the elderly to the robot designed features.
Keywords: Robots, Electroencephalogram, Objective preferences, Abstract
appearance, Figurative appearance
1 Introduction
In the past few years, many projects have begun to use rehabilitation robots to solve a
series of social problems in family management, rehabilitation monitoring, communi-
cation and social interaction [1–3]. In the future, more and more robots will be used
to support people's more intelligent life at home. One of the main differences between
robots and other household machines or objects is the social interaction between users
and the robot. It is necessary to know how to build a close relationship between robots
and humans, and how to cooperate actively with the robots. Generally speaking, the
current social robot research is mainly focused on expanding the use cases of human
robot interaction technology in related fields, such as eye tracking, predictive learning,
© The Author(s). 2021 Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which
permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the
original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or
other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit
line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by
statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a
copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 2 of 10
and human-machine relationship [4–6]. In these studies of robots, robot appearance
design is the basis of human-computer interaction, so it has received great attention.
In the product design, the emotional design of the robot shape can make a good user
experience, especially in the era of man-machine harmonious symbiosis, the robot with
emotional characteristics has increasingly become the urgent need of human life. As an
agent, appearance is the physical carrier of all other aspects and has great significance
[7–9]. It affects people’s first impression and expectation of the robot. There are many
questions that can be studied around robot appearance, and one of the issues that are
often debated is whether and to what extent smart products should look like people.
Several products on the market are designed with consideration for the similarity be-
tween products and human body forms, such as bottle, chair, and desk lamp. An-
thropomorphism is a method of assigning human characteristics to objects in order to
help people understand and interpret their behaviors and abilities [10, 11]. Therefore, it
has attracted extensive attention in fields such as information science, cognitive science,
art design science, and psychology that robots express emotions through shapes.
In terms of the influence of robot appearance design on human-computer inter-
action, some people think that for humans and robots to have credible and meaningful
interactions, robots should be similar to human beings in structure and function [12–
14]. The tendency to use humanoid features as attributes is considered to be a useful
tool to enable people to interact with robots. So that researchers begin to pay attention
to the classification of robot appearance. In recent years, many types of humanoid ro-
bots developed around the world can be divided into two types: those with extremely
human-like appearances are generally called “figurative type”, while others only have
the vague features of the human form are called “abstract type” [15]. In the current re-
search, scholars have studied the influence of robot appearance and human similarity
on human emotion. There is evidence that users want robots to be “intelligent ma-
chines” that can show more humanoid communication skills, but not like human be-
ings in appearance [16–18]. Through these studies, it is found that the robot head
shape is more likely to stimulate good impression if it is close to the baby’s head shape.
However, robots that look like but not human can seem strange and weird. This
phenomenon is often explained in the context of the uncanny valley hypothesis. This is
a theoretical hypothesis that explains the human emotional response to robot design. It
is believed that if a robot looks like a human, but not enough to evoke a sense of famil-
iarity, it may look like a terrible creature. These findings have a considerable impact on
the field of robot design because they mean that robots close to humans may cause un-
welcome, negative, and emotional reactions. Therefore, robot design is not only a de-
sign science, but also a cognitive science.
Affective processing in the human brain is receiving more and more attention. People
focus on robots that look more attractive, and the first impression of these robots is
stable for a long time, which also means that humanoid robots with excellent appear-
ance design will inspire positive emotions in users [19, 20]. And these positive emotions
are controlled by the left frontal cortex, while negative emotions depend on the full
function of the right frontal cortex [21, 22].
More and more, research is concerned with the design implications for the desired
end-user groups, whether children, adults, or the elderly [23, 24], looking at the appear-
ance design of robots from their point of view. In addition, there was a difference
Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 3 of 10
between young and older respondents: the older the elderly, the less they liked the ap-
pearance of a human being [25].
However, at present, the research on robot appearance preference is mainly based
on questionnaires measurements, interviews, behavioral experiments, and few stud-
ies use advanced neuroscience measurement instruments to enter the level of cog-
nitive neuroscience [26, 27]. In comparison, the cost of subjective measurement is
relatively low, but it does not go deep into the human brain to accurately grasp
the mechanism of human response to the appearance of the robot. Studies have
shown that in many cases, questionnaire responses are affected by external factors
and may be changed intentionally by the interviewees, rather than the initial direct
brain response [28]. In the past few years, researchers have also been interested in
using brain-imaging tools to provide objective data to determine the possible rela-
tionship between robot appearance and preferences, rather than simply asking
people what they like. In this way, cognitive neuroscience goes deep into the inter-
ior of the human brain, which can explore the neural response process and cogni-
tive mechanism of people to things, and then make the research go deep into a
more scientific and accurate basic level. In this respect, electroencephalogram is a
fairly objective approach to know people’s perception process and processing
mechanism of robot appearance from the brain cognitive level [29]. By using elec-
troencephalogram, it is possible to understand their emotional state when they are
looking at different robot designs.
Event-related potentials are a good method for facial perception analysis. In the field
of design, there has been some work that uses these methods to study aesthetic prefer-
ences. The brain response related to preference and rank of faces is that the emotional
judgment process precedes the cognitive process [30]. In other words, before we make
a conscious choice about a robot, we have unwittingly given the answer in advance.
Event-related potentials can assess the neural response to emotional events at millisec-
ond time resolution, and we know that decisions to like/dislike are made milliseconds
before we really realize it [31].
In summary, the existing research still lacks enough understanding of people’s prefer-
ence for the appearance of robots. Most of these studies use questionnaires with closed
questions to investigate this question, which may bring some bias to the experimenter.
Considering these questions, we decided not to find the answer directly through spe-
cific questions (for example, what kind of robot do you like). Instead, we try to explore
some of the aesthetic criteria of robots by collecting people’s electroencephalogram re-
sponses to different types of robots.
2 Materials and methods
2.1 Participants
In this experiment, a total of 10 participants were recruited to investigate the elderly re-
sponses to the appearances of robots (5 males, 5 females; mean age M = 61.4, standard
deviation = 1.2), among which 7 had no background in art design and 3 had some
background in art design. They were all right-handed and had normal or corrected vi-
sion. In structured interviews, none of the participants reported current neurological or
psychiatric illness or related drug intake.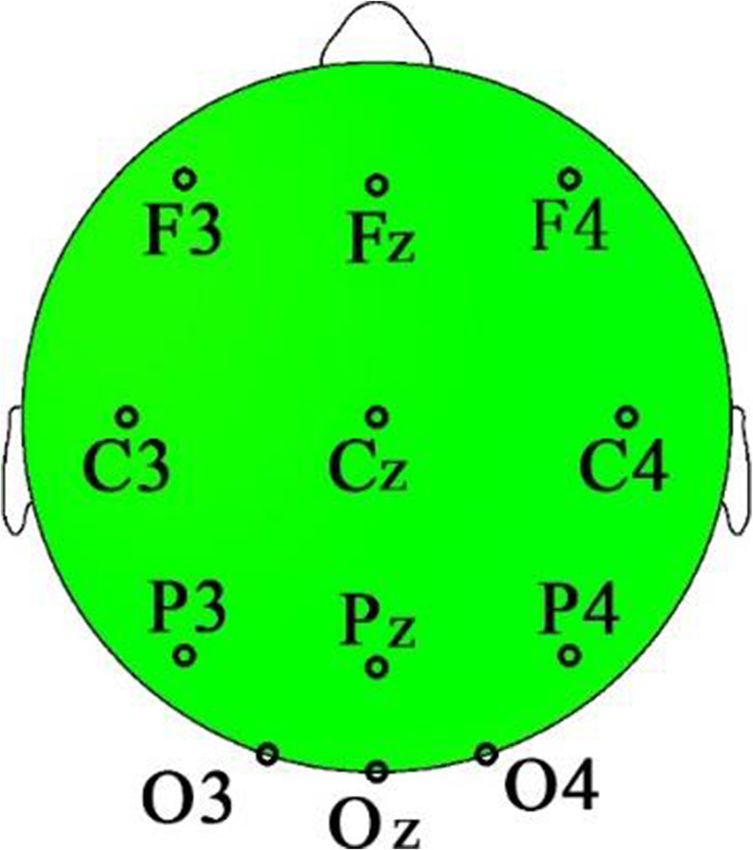
Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 4 of 10
2.2 Stimuli
Eighteen pictures of robot products have been collected from the Internet, not includ-
ing pictures of robot products that do not contain special design factors and are highly
realistic with human beings. After excluding the pictures of products with similar ap-
pearance, a total of 10 typical pictures were selected as stimulating materials. According
to the appearance characteristics of robot products, 10 robot pictures are divided into
two groups: abstract group and figurative group. S1 ~ S5 is an abstract group, a kind of
robot without realistic humanoid shape, which is easily regarded as a machine. How-
ever, it will have some stylized human-like features, such as simplified facial features,
eyes, ears, and eyebrows. S6 ~ S10 is the figurative group; the appearance of the robot
is technically as close as possible to the real human appearance, including arms, hands
and legs.
2.3 Procedure
First of all, we briefly introduce the experiment to the subjects and ask them to sign
the consent form. Then each subject wears an electrode cap and smears conductive
ointment. After all the preparatory work, the actual experiment began. Fast sequence
visual presentation task paradigm was used in the experiment. Ten robot pictures ap-
peared randomly on a 60-Hz 22-inch monitor which is about 90 cm away from the
subjects. All photos are played in three rounds, and each photo is played six times in
each round. The observation time of each picture was 5 s, and subjects were asked to
score the first impressions of the robot, including like/neutral/dislike. Electroencephalo-
gram signals are used to detect the subjects’ preference pattern.
2.4 Date acquisition
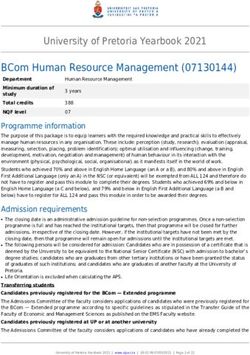
The electroencephalogram measurements consisted of 14 blocks, as shown in Fig. 1. It
has been found that most electroencephalogram analyses related to cognition are con-
centrated in the prefrontal, central, and parietal regions, so in this study, the electrodes
are located in the prefrontal region (F3,Fz, F4), the central region (C3, Cz, C4), the par-
ietal region (P3, Pz, P4) and the occipital region (O1, Oz, O2). Fz was used as the online
reference, and electrode impedance was maintained below 5 KΩ. Electroencephalo-
grams were acquired with BrainVision Recorder (Brain Products GmbH, Gilching,
Germany). The sampling rate was 500 Hz.
2.5 Date analysis
For subjective ratings of robot appearance, we performed a separate repeated measures
analysis of variance with agent type (abstract group and figurative group) as the factor.
We used a BrainVision Analyzer (Brain Products GmbH, Gilching, Germany) to
analyze electroencephalogram data. The raw electroencephalogram data were band-
pass filtered (0.1 ~ 30 Hz) and re-referenced to the average of the left and right mastoid
electrodes. The artifacts such as ophthalmogram and dermatoelectricity were removed,
and the wave map and topographic map were drawn according to the degree of prefer-
ence and the type of image stimulation. The amplitudes of different conditions and dif-
ferent brain regions were extracted and statistically analyzed by SPSS 22.Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 5 of 10
Fig. 1 Electrode distribution position
3 Results
3.1 Preference data
Subjects’ preference for robots with abstract appearance is like 74.4%, neutral 16.7%,
dislike 8.9%, and they think that the reasons why they like abstract robots most are
“cute,” “simple and honest,” and “easy to approach.” Subjects’ preference for robots
with figurative appearance is like 13.3%, neutral 25.6%, dislike 61.1%, and the subjects
thought that the most reasons for disliking figurative robots were “panic,” “bulkiness,”
and “hostility.”
3.2 Event-related potentials
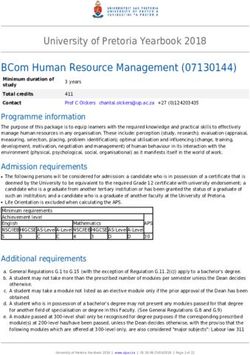
Figure 2 shows the superimposed average waveform of different region. Figure 3
represents the electroencephalogram topographic maps of the two types of robots,
and the color depth represents the degree of activation of the brain region. We
can know from these two pictures that the peak of figurative robot pictures is
higher and the fluctuation is more intense from 350 ms to 600 ms in the central
region and the right half of parietal region. While the peak of abstract robot pic-
tures is higher and the fluctuation is more intense in the prefrontal region, and
the difference between abstract robot and figurative robot is not obvious in the oc-
cipital region.
Select pictures S1 and S10 which have obvious differences from 10 pictures and were
selected as the representatives of abstract and figurative types, and then compare the
electroencephalogram data of the two pictures, as shown in Fig. 4. S1 elicit a stronger
N170 and the P300 of S10 is relatively stronger by comparing S1 and S10.Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 6 of 10
Fig. 2 Average waveforms of different regions of the head
3.3 Statistical results
Under the condition of visual stimulation of different types of robot pictures, the aver-
age amplitudes of multiple electrodes in four brain regions were calculated respectively.
Because the amplitude fluctuates with time, the time window for extracting the ampli-
tude must be limited. In this paper, we take the peak time point of the waveform as the
center and set a time window in the range of ± 10 ms, the amplitudes of N170, P300,
andN400 are extracted and statistically analyzed to compare the differences of the am-
plitudes of the two types of robots.
Taking the type of robot product image as independent variable and the amplitude of
each brain region as dependent variable, the paired sample test was carried out. The re-
sults show that there is a significant difference in the amplitude of the N170 compo-
nent in the prefrontal region under different picture types (t = − 1.07, p = 0.04),
indicating that the difference in the picture type has a main effect on the composition
of the prefrontal region. There is no significant difference in amplitude among the cen-
tral region (t = − 1.95, p = 0.10), the prefrontal region (t = − 1.38, p = 0.63), and the oc-
cipital region (t = − 1.34, p = 0.34). Under the condition of different picture types, the
amplitudes of P300 components in the parietal region (t = − 1.07, p = 0.06), central re-
gion (t = 2.42, p = 0.14), parietal region (t = 1.53, p = 0.18), and occipital region (t =
2.86, p = 0.11) were not significantly different. Similarly, under the condition of differ-
ent picture types, the amplitudes of N400 components in the parietal region (t = 3.51,Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 7 of 10
Fig. 3 Electroencephalogram topographic map of two types of robots
p = 0.12), central region (t = 5.37, p = 0.33), parietal region (t = 4.59, p = 0.25), and oc-
cipital region (t = 2.40, p = 0.42) were not significantly different.
4 Discussion
From these research results, we can discuss two contents in further detail. The first is
the influence of the appearance of the robot on people’s preferences. Secondly, how to
incorporate the preferences of end-users into the robot appearance design process.
4.1 Human preference for the appearance of robots
According to the experiments, the brain’s cognitive process of robots is that at 170 ms,
and there are more emotional expressions contained within stimulation of abstract
robot pictures, and induce early top-down regulation from neural systems involved in
rapid emotional processing. And after 300 ms, the elderly pay more attention to figura-
tive picture than abstract ones. Combined with the statistical results of the image pref-
erence of abstract and figurative robots, it can be seen that the design features of
abstract products are simple, they are just similar to human beings in appearance and
action to a certain extent and require less attention, and are more likely to stimulate
positive emotions. On the contrary, some of the figurative robots are too close to the
real human body and have more design features, so the elderly need to pay more atten-
tion and they are very likely to enter the range of uncanny valley. Even if there is only a
slight difference between the figurative robot and the human being, it will be very con-
spicuous and dazzling, so that the whole robot has a very stiff and scary feeling. And
the electroencephalogram experiments show that the negative emotions mainly depend
on the function of the right parietal region.Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 8 of 10
Fig. 4 Electroencephalogram topographic map of two types of robots
Although in theory, it is possible to cross the uncanny valley by being more
similar to humans, the elderly seem to prefer robots that are simple and easy to
understand and more easily integrated into the home environment. This kind of
abstract robot, which looks different from human, but has some human character-
istics, can make the interaction between people and robot more intuitive, pleasant
and easy. This is mainly because the elderly usually use similar information and as-
sumptions to form mental models about robots. A robot must be able to perform
a series of useful tasks or functions. And in order to share the environment and
interact with people, the execution process must be completed in a socially accept-
able, comfortable, and effective way. If a robot is exactly like a human in appear-
ance and behavior, then the elderly have reason to assume that humans will treat
it like other humans and expect it to act like a human. And if the appearance of a
robot is not exactly the same as that of a human, then the elderly will react to it
in the same way as they do to pets. They can tolerate problems such as not intelli-
gent enough and flaws in their work.
4.2 Robot appearance design for the elderly
The appearance of the robot for the elderly is not entirely determined by its function
and technical ability, it will also be affected by specific aesthetic and design features.
The appearance of robots affects human perception of robots to a great extent, so de-
signers can draw conclusions from the older adults’ tastes and preferences to measure
the attractiveness of some features in robot design. From the point of view of industrial
designers, creating the right robot shape is the most important thing. If designers canSun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 9 of 10
create the right robot, people will be more receptive to robots in their daily life. How-
ever, it is also very difficult to visualize the functions of robots to express positive im-
ages and establish close relationships with people. Therefore, designers have more and
more responsibility in robot design.
For rehabilitation, robot that have appeared in the older adults’ lives at present and
will appear in large numbers in the future, when designing them, the prototype should
tend to not only be anthropomorphic, but also looks like a machine, avoiding the un-
canny valley effect. This is a problem that all of us who are concerned about robot and
the development of this industry need to pay attention to. Designers might as well re-
gard the robot as a kind of intelligent household appliances; on the one hand, it can
minimize the contrast between the robot and the older adults’ ability defects. On the
other hand, the appearance of the robot affects people’s evaluation of the ability of the
robot, and also has an impact on the accessibility, desirability, and expressiveness of the
robot.
5 Conclusions
The rehabilitation robots appear more and more in the older adults’ life scenes, and the
appearance design of robots plays a very important role in the emotional experience of
the elderly. Through electroencephalogram experiments, the elderly are more likely to
like the abstract appearance, and have a low preference for the figurative appearance,
which may even arouse users’ fear. Therefore, for designers, robot appearance should
not look too similar to a human, so as to make the interaction between the elderly and
robot more intuitive, pleasant, and easy.
Acknowledgements
Not applicable.
Authors’ contributions
Both authors have contributed towards this work as well as in compilation of this manuscript. The authors read and
approved the final manuscript.
Funding
This research was financially supported by MOE (Ministry of Education in China) Youth Project of Humanities and
Social Sciences Fund, 2018: “Design and Research of Intelligent Home Products and Services System Based on the
Body Language of the Elderly”(No.18YJCZH158), University-Industry Collaborative Education Program, 2020:“Research
on the body language design of the elderly based on wearable motion capture system” (No. 202002035017), and the
Fundamental Research Funds for the Central Universities (No. 30919013233).
Availability of data and materials
Unfortunately, the data are not available online. Kindly, contact the corresponding author for data requests.
Declarations
Consent for publication
Informed consent was obtained from all authors included in the study.
Competing interests
The authors declare that they have no competing interests.
Author details
1
School of Design Arts and Media, Nanjing University of Science and Technology, Nanjing, China. 2College of
Furnishings and Industrial Design, Nanjing Forestry University, Nanjing, China.
Received: 10 May 2021 Accepted: 29 June 2021
References
1. R. Gassert, V. Dietz, Rehabilitation robots for the treatment of sensorimotor deficits: a neurophysiological perspective. J.
Neuroeng. Rehabil. 15(1), 1–15 (2018)Sun and Jin EURASIP Journal on Advances in Signal Processing (2021) 2021:35 Page 10 of 10
2. Y. Ma, S. Xie, Y. Zhang, A patient-specific EMG-driven neuromuscular model for the potential use of human-inspired gait
rehabilitation robots. Comput. Biol. Med. 70(1), 88–98 (2016)
3. V. Khoshdel, A. Akbarzadeh, N. Naghavi, A. Sharifnezhad, M. Souzanchi-Kashani, sEMG-based impedance control for
lower-limb rehabilitation robot. Intell. Serv. Robot. 11(1), 97–108 (2018)
4. E.A. Björling, E. Rose, Participatory research principles in human-centered design: engaging teens in the co-design of a
social robot. Multimodal Technol. Interaction 3(1), 1–17 (2019)
5. P.T. Jardine, M. Kogan, S.N. Givigi, S. Yousefi, Adaptive predictive control of a differential drive robot tuned with
reinforcement learning. Int. J. Adaptive Control Signal Process. 33(2), 410–423 (2019)
6. S.C. Lewis, A.L. Guzman, T.R. Schmidt, Automation, journalism, and human–machine communication: Rethinking roles
and relationships of humans and machines in news. Digit. J. 7(4), 409–427 (2019)
7. S. Ivaldi, , S. Lefort, J. Peters, M. Chetouani, J. Provasi, E. Zibetti, Towards engagement models that consider individual
factors in HRI: on the relation of extroversion and negative attitude towards robots to gaze and speech during a
human–robot assembly task, Int. J. Soc. Robot., 9(1), 63-86 (2017)
8. A. Ajoudani, A.M. Zanchettin, S. Ivaldi, A. Albu-Schäffer, K. Kosuge, O. Khatib, Progress and prospects of the human–
robot collaboration. Autonomous Robots 42(5), 957–975 (2018)
9. J. Murphy, U. Gretzel, J. Pesonen, Marketing robot services in hospitality and tourism: the role of anthropomorphism. J.
Travel Tourism Mark. 36(7), 784–795 (2019)
10. A. Langer, R. Feingold-Polak, O. Mueller, P. Kellmeyer, S. Levy-Tzedek, Trust in socially assistive robots: Considerations for
use in rehabilitation. Neurosci. Biobehav. Rev. 104(1), 231–239 (2019)
11. E. Broadbent, Interactions with robots: the truths we reveal about ourselves. Annu. Rev. Psychol. 68(1), 627–652 (2017)
12. G. Génova, I.N. Quintanilla, Are human beings humean robots? J. Exp. Theor. Artif. Intell. 30(1), 177–186 (2018)
13. D.G. Johnson, M. Verdicchio, Why robots should not be treated like animals. Ethics Inf Technol 20(4), 291–230 (2018)
14. R. Sparrow, M. Howard, When human beings are like drunk robots: driverless vehicles, ethics, and the future of
transport. Transportation Res. Part C Emerg. Technol. 80(1), 206–215 (2017)
15. G. Matsuda, K. Hiraki, H. Ishiguro, EEG-based mu rhythm suppression to measure the effects of appearance and motion
on perceived human likeness of a robot. J. Hum. Robot Interaction 5(1), 68–81 (2015)
16. T. Tanioka, K. Osaka, R. Locsin, Y. Yasuhara, H. Ito, Recommended design and direction of development for humanoid
nursing robots perspective from nursing researchers. Intell. Control Automation 8(2), 96–110 (2017)
17. J. Peter, R. Kühne, The new frontier in communication research: why we should study social robots. Media Commun.
6(3), 73–76 (2018)
18. S. Saunderson, G. Nejat, How robots influence humans: a survey of nonverbal communication in social human–robot
interaction. Int. J. Soc. Robot. 11(4), 575–608 (2019)
19. N. Geva, F. Uzefovsky, S. Levy-Tzedek, Touching the social robot PARO reduces pain perception and salivary oxytocin
levels. Sci. Rep 10(1), 1–15 (2020)
20. T.B. Sheridan, A review of recent research in social robotics. Curr. Opin. Psychol. 36(1), 7–12 (2020)
21. R.E. Wheeler, R.J. Davidson, A.J. Tomarken, Frontal brain asymmetry and emotional reactivity: a biological substrate of
affective style. Psychophysiology 30(1), 82–89 (1993)
22. E. Harmon-Jones, P.A. Gable, On the role of asymmetric frontal cortical activity in approach and withdrawal motivation:
an updated review of the evidence. Psychophysiology 55(1), 1–7 (2018)
23. M.I. Ahmad, O. Mubin, J. Orlando, Adaptive social robot for sustaining social engagement during long-term children–
robot interaction. Int. J. Hum. Comput. Interaction 33(12), 943–962 (2017)
24. Y.H. Wu, C. Fassert, A.S. Rigaud, Designing robots for the elderly: appearance issue and beyond. Arch. Gerontol. Geriatr.
54(1), 121–126 (2012)
25. L. Chu, H.W. Chen, P.Y. Cheng, P. Ho, I.T. Weng, P.L. Yang, S.L. Yeh, Identifying features that enhance older adults’
acceptance of robots: a mixed methods study. Gerontology 65(4), 441–450 (2019)
26. M.M. de Graaf, An ethical evaluation of human–robot relationships. Int. J. Soc. Robot. 8(4), 589–598 (2016)
27. S. Coghlan, F. Vetere, J. Waycott, B.B. Neves, Could social robots make us kinder or crueller to humans and animals? Int.
J. Soc. Robot. 11(5), 741–751 (2019)
28. M. Aubry, R. Müller, B. Hobbs, T. Blomquist, Project management offices in transition. Int. J. Proj. Manage. 28(8), 766–778
(2010)
29. V. Gandhi, G. Prasad, D. Coyle, L. Behera, T.M. McGinnity, EEG-based mobile robot control through an adaptive brain–
robot interface. IEEE Trans. Syst. Man Cybern. Syst. 44(9), 1278–1285 (2014)
30. M.L. Carrito, P. Bem-Haja, C.F.D. Silva, D.I. Perrett, I.M. Santos, Event-related potentials modulated by the perception of
sexual dimorphism: The influence of attractiveness and sex of faces. Biol. Psychol. 137(1), 1–11 (2018)
31. J. Teo, C.L. Hou, J. Mountstephens, Preference classification using electroencephalography (EEG) and deep learning. J.
Telecommunication Electron. Comput. Eng. 10(1), 87–91 (2018)
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.You can also read