Dugong (Dugong dugon) vocalization patterns recorded by automatic underwater sound monitoring systems
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Dugong (Dugong dugon) vocalization patterns recorded
by automatic underwater sound monitoring systems
Kotaro Ichikawa,a兲 Chika Tsutsumi, and Nobuaki Arai
Graduate School of Informatics, Kyoto University, 606-8501 Kyoto, Japan
Tomonari Akamatsu
National Research Institute of Fisheries Engineering, 314-0408 Ibaraki, Japan
Tomio Shinke
System Intech Co., Ltd., R&D Center, 424-8610 Shizuoka, Japan
Takeshi Hara
Japan Fisheries Resource Conservation Association, 104-0054 Tokyo, Japan
Kanjana Adulyanukosol
Phuket Marine Biological Center, 83000 Phuket, Thailand
共Received 29 September 2005; revised 6 April 2006; accepted 10 April 2006兲
To quantitatively examine the diurnal, or tidal, effects on dugong behavior, we employed passive
acoustic observation techniques to monitor the animals. Automatic underwater sound monitoring
systems for dugongs 共AUSOMS-D兲 were deployed on the sea floor at depths of about 5 m south of
Talibong Island, Thailand. The AUSOMS-D recorded underwater sound in stereo at a sampling
frequency of 44.1 kHz for more than 116 consecutive hours. Dugong calls were automatically
detected by newly developed software with a detection rate of 36.1% and a false alarm rate of 2.9%.
In total, 3453 calls were detected during the 164 h of recording. The autocorrelation of the call rate
indicated an attendance cycle of about 24 or 25 h, and the most frequent vocalizations were
observed from 0300 to 0500 h. The calculated bearings of the sound sources, i.e., dugongs, were
used as an indicator to track the relative numbers of dugongs during the monitoring periods. © 2006
Acoustical Society of America. 关DOI: 10.1121/1.2201468兴
PACS number共s兲: 43.30.Sf, 43.80.Ka, 43.30.Wi, 43.60.Vx 关WWA兴 Pages: 3726–3733
I. INTRODUCTION ers, weather conditions, and water clarity. An additional
The dugong 共Dugong dugon兲 is the only strictly marine weak point of visual observation is that it cannot be per-
mammal that is a benthic-feeding, seagrass specialist 共Marsh formed at night.
et al., 2002兲. Although the world’s largest dugong population Recently, passive acoustical monitoring techniques are
is found in Australian waters, the local populations in many being used for observing the behavior of marine mammals.
other locations are becoming endangered 共e.g., Marsh et al., In response to West Indian manatees 共Trichecus manatus lat-
2002; Preen, 1998; Preen, 2004兲. The lack of ecological and irostris兲, which are in the-same order 共Sirenia兲 as the dug-
behavioral information on this species, however, has slowed ong, being accidentally struck by boats, Niezrecki et al.
conservation actions in many places. Behavioral and ecologi- 共2003兲 devised a method to distinguish manatee calls from
cal information on local populations of dugongs is urgently ambient noise, and 96% of manatee vocalizations were cor-
needed for the implementation of appropriate protection rectly identified, with a false alarm rate of 16%. Niezrecki et
measures. al. 共2003兲 suggested a warning system to alert boaters to the
Dugongs are usually found in shallow waters, spending presence of manatees, and could thereby avoid collisions.
72% of their day in waters less than 3 m deep 共Chilvers Wang et al. 共2005兲 and Akamatsu et al. 共2001兲 compared the
et al., 2004兲, but little information is available on the diurnal, detection of finless porpoises in China using visual and
or tidal, effects on the presence, swimming direction, and acoustic observations, and acoustic observations were deter-
minimum group size of the animal. Conventional behavioral mined to be highly reliable in detecting finless porpoises
observations have relied largely on visual observations from emitting ultrasonic pulses because of their frequent phona-
either airplanes or ships, or sometimes from land observatory tion 共Akamatsu et al., 2005兲.
platforms 共Anderson, 1986; Anderson, 1995a; Marsh and Acoustic observation has several advantages over visual
Sinclair, 1989; Marsh et al., 1999兲. However, visual surveys observation. It can be performed at a constant detection effi-
are problematic; the probability of finding dugongs depends ciency for a long period, and consecutive observations, in-
on several factors, such as the experience level of the observ- cluding night monitoring, are useful for better understanding
study animals. For subjects with easily distinguished calls in
habitats without great geographical constraints, acoustic ob-
a兲
Electronic mail: ichikawa@bre.soc.i.kyoto-u.ac.jp servation could be a powerful outdoor observational tool.
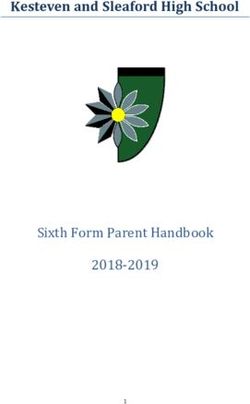
3726 J. Acoust. Soc. Am. 119 共6兲, June 2006 0001-4966/2006/119共6兲/3726/8/$22.50 © 2006 Acoustical Society of AmericaFIG. 1. A sonogram 共bottom inset兲 and a waveform 共middle inset兲 of dug-
ong calls including three short-duration calls and a long-duration call, re-
corded in the study area. Spectrograms of a typical short-duration call 共top
FIG. 2. A map of the study site around the southern part of Talibong Island,
left兲 and a typical long-duration calls 共top right兲 are shown in the top inset.
Trang, Thailand. AUSOMS-D, represented by the star, was deployed on the
sea floor at depths of about 5 m. Shaded areas outlined by break lines
indicate seagrass distribution, surveyed by Nakanishi et al. 共2006兲. Most of
the dugongs were sighted in/around the seagrass beds 共Nakanishi et al.,
Dugong vocalizations have been classified into three 2005; Hines et al., 2005兲.
groups 共Anderson et al., 1995b兲: chirp-squeaks, barks, and
trills. Chirp-squeaks are short, frequency-modulated signals,
with two to five harmonics within the 18-kHz band. Barks dugong behavior and to detect changes in the number of
appear to be broadband signals covering the 500- to individuals in the monitored area, with the goal of character-
izing the ecological aspects of dugongs in nearshore areas.
22000-Hz range with a median frequency of about 1200 Hz
and no frequency modulation. The bark duration ranges from
0.03 to 0.12 s. Trills, heard as a rising cascade of notes, last II. MATERIALS AND METHODS
100– 2200 ms, with an average and standard deviation of A. Research site and the monitored area
850± 269 ms. 共Anderson et al., 1995b兲. Anderson et al.
Our recording experiments were conducted south of
共1995b兲 also suggested the function of each call type as fol-
Talibong Island, Trang, Thailand, 共07° 12. 908⬘N ,
lows: “Chirp-squeaks may serve as announcements of terri-
99° 24. 071⬘E; Fig. 2兲. The sea floor around Talibong Island
tory ownership, have a ranging function in territorial de-
is covered by approximately 7 km2 of seagrass beds, the
fense, and serve as signatures distinguishing neighbors from
largest in Thailand, and mainly composed of Halophila ova-
possible mate or challengers. Barks seem appropriate as
lis, for which dugongs show a preference 共Hines, 2002兲.
warning sounds, indicating readiness to attack. Trills may
The seafloor is almost flat with a rather gentle slope, and
indicate nonaggressive intentions” Dugong calls in southern
few obstacles exist to obstruct the path of a sound wave in
Thailand have shown a slight difference in the acoustical
the focal area. The largest dugong population in Thailand is
characteristics that were described in the Anderson et al.
also found in this area 共Adulyanukosol, 1999兲. A population
共1995b兲 report, and have been roughly categorized into two
of 123 dugong individuals, about 62% of the total estimated
groups: short-duration and long-duration calls 共Ichikawa et
population 共about 200 individuals兲 along the Andaman coast
al., 2003兲. Out of more than 1400 dugong calls, we could not
of Thailand, were counted by aerial surveys conducted in the
record any sound that was likely to correspond to the barks
Trang province 共around Talibong Island and the neighboring
in the Anderson et al. 共1995b兲 study. Short-duration calls,
Muk Island兲 in 2000 and 2001, and all dugongs sighted were
which were the most frequent in the study area, had an av-
in ⱕ5-m depth lowest low water 共Hines et al., 2005兲.
erage frequency of 4521± 1615 Hz and an average duration
of 126± 87 ms 共n = 704兲. Long-duration calls, which seemed
B. Recording device and its installation
to correspond to the trills in the Anderson et al., 1995b study,
were characterized by a frequency of 4152± 1111 Hz and a Automatic underwater sound monitoring systems for
duration of 1737± 1049 ms 共n = 74兲. The highest vocalization dugongs version 1.0 共AUSOMS-D; System Intech Co., Ltd.,
frequency was once every 2 s. Frequencies of once in 20 to Tokyo, Japan; see details in Shinke et al., 2004兲 were used
30 s were common and suitable for the application of passive for passive acoustical monitoring. These systems were de-
acoustical observation tools 共Ichikawa et al., 2003兲. Figure 1 signed based on the acoustical characteristics of dugong calls
shows a sonogram of three short-duration calls and a long- described in Anderson and Birtles 共1978兲 and Ichikawa et al.
duration call, together with a time series waveform view and 共2003兲. The AUSOMS-D consisted of a pair of hydrophones
the spectrograms. located 2 m apart for calculating the bearings of the sound
In the present study, we applied passive acoustic obser- sources. The electric circuits and batteries were housed in a
vation techniques to observe the diurnal, or tidal, effects on pressure-resistant case 关Fig. 3共a兲兴, and the hydrophones were
J. Acoust. Soc. Am., Vol. 119, No. 6, June 2006 Ichikawa et al.: Periodic attendance of vocalizing dugongs 3727FIG. 4. An example of the results of the automated detection. Sonograms of
three short-duration calls and a long-duration call are shown in the lower
inset and the result of the filtering in the upper, with asterisks indicating the
star-time versus the arrival time difference in a millisecond of each detection
共a vertical axis on the upper left兲. The long-duration call was detected as a
complex of four shorter-duration calls.
2004, retrieved on 26 February 2004, and the data were read
out on 27 February 2004 then reinstalled in the same position
on 28 February 2004. We used an anchored buoy to make
sure the AUSOMS-D was positioned correctly.
To calibrate the bearing calculations, dugong calls were
transmitted near the AUSOMS-D from a research vessel by
an underwater speaker. The vessel trajectories measured by
both GPS and the AUSOMS-D were compared.
C. Post-processing of the underwater sound datasets
Dugong calls were automatically detected from the am-
FIG. 3. 共a兲 A block diagram of AUSOMS-D. The diameter, length, and bient noise using newly developed software in MATLAB. The
weight 共in air兲 of the system was 267 mm, 680 mm, and about 50 kg, re- mean frequency range of the dugong vocalization was
spectively. 共b兲 A complete system sensitivity/response curve with hydro- 4521± 1615 Hz for the short-duration calls and
phones of −190 dB, 1 kHz high-pass filter and 70 dB gain control. The
4152± 1111 Hz for the long-duration calls 共Ichikawa et al.,
system showed a flat frequency response over 2 – 10 kHz.
2003兲. In order to reduce any low frequency sound compo-
nent mainly produced by ship traffic, the sound signals were
fed into a 1-kHz high-pass filter. To briefly describe the de-
connected to a stereo preamplifier. Each hydrophone had flat
tection algorithm, the sound data was segmented into time
frequency responses within 2 dB between 1 and 10 kHz. The
windows. Then the dominant frequency component of each
hydrophone sensitivity was −190 dB 共re 0 dB 1 V / Pa at
time window was calculated by taking the Fast Fourier
10 kHz兲. High-pass filters could be altered to thru, 200 Hz,
Transform. After the summation processing, if the dominant
1 kHz, 4 kHz. The recording level could be adjusted to 70,
frequency components of the neighboring time windows ex-
80, or 90 dB in advance of recording by an attenuator. Figure
ceed the spectrum-level threshold, and continue and persist
3共b兲 shows the complete system response curve with the hy-
for more than length thresholds, the components was consid-
drophones of −190 dB sensitivity, 1 kHz high-pass filter, and
ered as a dugong call. The following describes the algorithm
70 dB gain control. Digitized signals were recorded on an
in detail 共an examples is shown in Fig. 4兲.
80 GB removable hard disk drive in uncompressed.wav for-
mat with a time stamp. The longest recording duration was 共1兲 Underwater sound data were segmented into 1.8 ms
over 116 h. The power supply system with batteries and time windows.
dc/dc converter were also housed inside the case. The sam- 共2兲 To calculate the power spectrum density for each time
pling frequency of the A/D converter was 44.1 kHz and the window, a fast Fourier transform 共FFT, 1024 points兲
dynamic range was 74– 120 dB 共re1 Pa兲 with a 16-bit was applied to every 80 time points. The spectrum
resolution. The time synchronizations and recording sched- density was named submatrix 兵Fmn其 共m
ules were set by the user’s personal computer. = 1 , 2 , 3 , . . . , N , n = 1 , 2 , . . . , 512兲, where N is the num-
AUSOMS-D was deployed on the sea floor off the ber of the time window. Each Fm had a 512-term fre-
southern part of Talibong Island 共07° 12. 786⬘ N , quency range from 0 to 22 kHz.
99° 24. 114⬘ E, Fig. 2兲. Two sandbags were put together with 共3兲 Then, 25-moving summation processing was used to
the AUSOMS-D so that the instrument would not slide achieve a new matrix 兵Smn其 共m = 1 , 2 , 3 , . . . , N , n
around and an underwater compass was used for the instru- = 1 , 2 , . . . , 512兲 defined from Fkn by taking the sum-
ment orientation. Data were recorded for up to five consecu- mation of each corresponding frequency component
tive days from 24 to 26 February 2004 and 28 February to 4 of the 25-term successive submatrix 兵Fkn其共k = m , m
March 2004. The AUSOMS-D was installed on 24 February + 1 , m + 2 , . . . , m + 24, n = 1 , 2 , . . . , 512兲 关Eq. 共1兲兴,
3728 J. Acoust. Soc. Am., Vol. 119, No. 6, June 2006 Ichikawa et al.: Periodic attendance of vocalizing dugongsTABLE I. Threshold settings and the detection efficiency.
Frequency
Spectrum level Duration modulation Detection False alarm rate Number of
共dB rms re 1Pa2 / Hz兲 共ms兲 共Hz兲 rate 共%兲 共%兲 calls
87.75 60 100 36.1 2.9 355
m+24 5-min interval. Doubtful detections, indicated by more than
Smn = 兺 Fkn .
k=m
共1兲 10 calls per 5-min interval, were replayed to determine
whether the detections were noise. Thus, ship noise and
Equation 共1兲 was repeated for n = 1 to n = 512 to obtain ma- shrimp noise were manually removed from further analyses.
trix 兵Smn其. Given that dugong calls are narrowly frequency
modulated at around 4 kHz over a duration of 60 ms E. Bearing calculation and accuracy evaluation
共Anderson and Birtles, 1978; Ichikawa et al., 2003兲, the Sound source bearings were calculated based on the
25-moving summation processing should have improved time differences of sounds at stereo hydrophones obtained by
the signal-to-noise ratio of dugong calls by 5 dB, through the cross-correlation between the two channels 关Eq. 共3兲兴:
冉 冊
increasing the relative amplitude of the narrow-band fre-
quency component likely to be a dugong call and by de- c⫻t
= cos−1 , 共3兲
creasing other random components 关Eqs. 共2.1兲–共2.3兲兴. d
25
where is the bearing of the sound source, c is underwater
兺
i=1
si = 25 · s, 共2.1兲 sound speed, t is the arrival time difference, and d is the
distance between the stereo hydrophones.
冑兺 25
i=1
n2i = 冑25 · n, 共2.2兲 F. Tide level
Tide levels were taken from the annual tide tables for
Thai waters, which contained hourly recorded heights of wa-
= 冑25 · = 5 · SNR⬘ ,
25 · s s
SNR⬘ = 共2.3兲 ter predicted in meters above the lowest low water. These
25 · n n data were published by the Hydrographic Department of the
where s and n is the signal and the noise component, respec- Royal Thai Navy.
tively, and SNR’ is the improved signal-to-noise ratio 共SNR兲
after the summation processing 共Minami, 1986; Braganza III. RESULTS
and Prabhanada, 1995兲. A. Detection rate and bearing accuracy
共4兲 The frequency Am of the maximum spectrum density
level within each Sm was determined. Over 100 GB of underwater sound data were obtained in
共5兲 The spectrum density levels of Am over a detection the recording experiment. To assess the detection probability,
threshold level were used for the analyses. Comparing automatically detected calls and human detected calls were
the values of successive Am and Am+1 , Am+1 was fil- compared, and different sets of detection parameters, such as
tered to be within ±100 Hz of Am. If a successive the spectrum density level duration, were tested. In total, 355
series of 兵Am其 that satisfied the above conditions dugong calls were detected by a human analyst within 6 min
lasted for more than the minimum allowable dura- from 2116 to 2122 h on 2 March. The best overall detection
tion, the series was considered to be the dugong’s performance was provided by the parameter set specified in
biological sound; the frequency modulation of dug- Table I.
ong chirp-squeaks and trills are reported to be The acoustical filter, with the filtering parameters de-
gentle and to change little between neighboring scribed in Table I, detected 172 possible dugong calls out of
1.8-ms time windows. The detection threshold for the sound dataset identical to the one heard by the human
the spectrum density level and the minimum allow- analyst. The filter correctly detected 36.1% 共⫽ 128/77355
able duration were altered to evaluate the detection calls兲 of the human-detected calls and 2.9% 共⫽ 5/172 detec-
probability. tions兲 of the filtered detections were the false alarms. There
were 18 calls with a relatively long duration 关avg.
1266.4± 814.0 ms 共SD兲兴 that were divided into some pieces
D. Manual reduction of ship noise and remaining
and counted as a series of some shorter-duration calls 共see
biologic noise
the example in Fig. 4兲. In total, 39 detections were confirmed
Despite the low false detection rate of automatic detec- to be such split parts of a call. The low detection rate was
tion, broadband noise from fishing boats and pulse noise partly because of the high-spectrum level threshold used to
thought to be created by snapping shrimp masked dugong prevent unreliable detection in/low signal-to-noise ratio situ-
calls. In all cases, large-level masking resulted in an unnatu- ations, for if we exclude the data less than 100 dB at the
ral number of detected calls, e.g., more than 500 calls per dominant frequency, the detection rate increased to be about
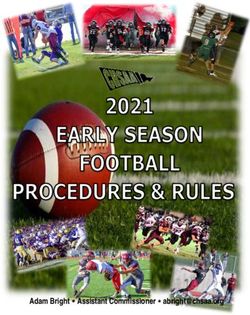
J. Acoust. Soc. Am., Vol. 119, No. 6, June 2006 Ichikawa et al.: Periodic attendance of vocalizing dugongs 3729FIG. 5. A time series of change in the number of calls per 5-min interval
共the upper兲 and the relative tide levels 共the lower兲. The shaded bars indicate
the nighttime from 1800 to 0600.
72.6% 共⫽ 98/135 calls兲. All of the underwater sound datasets
were analyzed with the detection parameters found in Table
I. Bearing calibration results indicated an average error in
degrees of 9.43± 9.61° 共SD; n = 117兲.
B. Frequency and bearing analyses
In total, 11 836 possible calls were detected during the
164 h recording trial from 1000 h on 24 February 2004 to
1000 h on 26 February 2004 共48 h; the first period兲 and from
1000 h on 28 February 2004 to 0600 h on 4 March 2004
共116 h; the latter period兲. We did not record underwater
sound on 26 and 27 February because of system mainte-
nance. Of the total detections, 3453 were defined as dugong
calls, while 8383 ship and biologic noise components were
removed from the analyses. A total of 664 calls
共13.8 calls h−1兲 were detected during the first period and
2789 共24.0 calls h−1兲 occurred during the latter period. Fig-
ure 5 shows the time series change in the number of dugong
calls per 5-min interval. Time series change of the relative
tide level is also shown in the upper inset of Fig. 5. The
FIG. 6. Autocorrelation of the dugong vocalization rate. The number of
recording period coincided with the last half of a spring tide calls 5-min interval showed about 24-h time cycle in both periods.
and the first quarter of a neap tide. The tidal level variation
was significantly greater in the first period than in the latter
period 共t test, P ⬍ 0.01; 2.55± 0.25 m, n = 4, and and inshore directions from the AUSOMS-D. Time 0 was the
1.04± 0.53 m, n = 12, respectively兲. The tidal cycle was 12 h lowest 共a兲, 共d兲 or highest tide 共b兲, 共e兲, or the accumulated
for the first period and 13 h for the latter. data from other time periods 共c兲, 共f兲. In the first period, dur-
In the first period, the autocorrelation of the dugong vo- ing the low tide hours, one hour before and after the lowest
calization showed periodic cycles of 5.25 and 24.25 h 共Fig. tide, about 60.8% of dugong calls were vocalized from the
6, upper兲, whereas in the latter period the vocalization rate inshore direction 关the source directions were less than 90°
showed a 25.58-h cycle 共Fig. 6, lower兲. from the AUSOMS-D; Fig. 8共a兲兴, whereas about 55.6% and
Hourly variation in the number of detected calls and ship
noise component is shown in Fig. 7. We divided the time of
day into 8 periods, 0000–0300, 0300–0600, 0600–0900,
0900–1200, 1200–1500, 1500–1800, 1800–2100, and 2100
− 2400 h, and compared the average numbers of calls per
period. Vocalizations were most frequent from 0300 to
0600 h, both in the first and the latter period 共Scheffe’s pair-
wise comparison test, P ⬍ 0.01兲, accounting for 34.03 共226/
664兲 and 47.40% 共1322/2789兲 of the total calls per period,
respectively.
Although the periodic cycle of vocalization rate was
nearly identical, dugong vocalization was infrequent during
the first period relative to the latter period. Figure 8 shows
FIG. 7. Histogram of the average number of calls per hour. The horizontal
the distribution of the sound source direction from the axis represents time of day and the vertical axis shows the average number
AUSOMS-D, with 0° and 180° corresponding to the offshore of calls.
3730 J. Acoust. Soc. Am., Vol. 119, No. 6, June 2006 Ichikawa et al.: Periodic attendance of vocalizing dugongssystems. The monitoring period covered 10 days, or 164 ef-
fective monitoring hours 共48 and 116 consecutive hours兲.
The dugong vocalization detection performance of the
AUSOMS-D was confirmed. The detection and the false
alarm rates were 36.1% and 2.9%, respectively. Niezrecki
et al. 共2003兲 had applied automatic detection to manatee
calls, which are reported to have similar acoustical charac-
teristics to those of dugongs 共Anderson, 1995兲, and con-
cluded that the signal strength of a manatee vocalization and
the sound level of the background noise were the two key
factors affecting the performance of any manatee warning
system. Both factors are directly related to the signal-to-
noise ratio of a manatee signal 共Niezrecki et al., 2003兲. Like-
wise, the detection of dugong vocalizations would be af-
fected by the signal-to-noise ratio of a dugong call. The next
logical extension of the automatic detection system was to
investigate dugong sound levels as a function of distance
from the source. The average error of the bearing calcula-
tions resulted in 9.43± 9.61° 共SD, n = 117兲.
The time cycle of the vocalization frequency itself was
likely driven by circatidal rhythm or circadian rhythm, or
both, because the autocorrelation of the vocalization rates
showed 24.5 and 25.6-h cycles through each period 共Fig. 6兲.
However, there was no drift that exactly followed a 25-h
cycle, as shown in Fig. 7. If the attendance cycle of vocaliz-
ing dugongs in the monitored area were only driven by the
tidal shift, vocalization peaks should have occurred, even in
daytime, during the spring and neap tide periods. These re-
sults suggest that the periodic cycle of dugong vocalization
FIG. 8. Distribution of the sound source directions of dugong calls observed frequency was driven, not only by the tidal cycle, but also by
1 h before and after the low tide 共a兲,共d兲 and the high tide hours 共b兲,共e兲, and the diel cycle of about 25 and 24 h. The number of detected
the accumulated data from other time periods 共c兲,共f兲. Lightly shaded bars in calls also varied between the two monitoring periods; many
each of 共a兲–共f兲 was placed at 90°, with the width indicating a mean bearing more calls were detected in the latter period, when the tidal
error of about 9.43°.
range was much less than in first period. The dugong vocal-
ization source bearings indicated more frequent use of in-
68.8% were vocalized from the inshore direction during the shore areas 共from the AUSOMS-D兲 than offshore areas. A
high tide hours 关Fig. 8共b兲兴 and other periods 关Fig. 8共c兲兴, re- significant difference was found between the first and latter
spectively. However, in the latter period, about 81.2%, periods in the average percentage of calls vocalized from the
69.3%, and 84.6% of calls were vocalized from the inshore inshore direction 共Welch’s t test, n = 3 for each period, P
direction during low tide hours 关Fig. 8共d兲兴, high tides 关Fig.
= 0.027兲. Dugongs vocalized more frequently inshore of
8共e兲兴, and during other time periods 关Fig. 8共f兲兴, respectively.
AUSOMS-D in the latter period, during the neap tide 关Figs.
Series of detected calls occurring within intervals shorter
8共a兲–8共f兲兴. The variance of the sound source direction within
than 1 s were extracted. The variance in degrees in the sound
call series of 1-s interval 共MPI兲 suggested that group aggre-
source directions within each extracted series was then cal-
gation occurred in the latter period. The small tidal range
culated and considered an index for the number of simulta-
would have facilitated the aggregation within a monitored
neously existing dugong individuals, i.e., an “acoustical
area.
snapshot,” hereafter referred to as the momentary population
Several visual surveys revealed the evidence of dug-
index or MPI. If the series were composed of calls emitted
ongs’ feeding in intertidal flats that were physically inacces-
by more than one individual, the MPI would be greater.
sible during low tides 共e.g., Adulyanukosol, 1999; Mukai
There were 51 series in the first period and 308 in the latter,
et al., 1999; Nakoaka and Aioi, 1999; Tsutsumi et al., sub-
with an average MPI of 35.4± 20.91 共SE兲 and 157.08± 36.48
mitted兲. Thus, in shallow areas, they would been under
共SE兲, respectively, a significant difference 共Welch’s t test,
strong time constraints regulated by the tidal range. Many
P ⬍ 0.01兲, indicating that more individuals aggregated in the
studies have suggested a correlation between dugong activity
monitored area during the latter period than in the first pe-
and tidal shift. For example, Anderson and Birtles 共1978兲
riod.
reported that dugong feeding at Shoalwater Bay 共Queen-
sland, Australia兲 was strongly regulated by tidal patterns.
IV. DISCUSSION
They also reported that diurnal inshore feeding was normal,
In this study we provided the first long-term recording of even without frequent anthropogenic disturbance, and that
dugong vocalizations using stationary acoustical monitoring the restriction to nocturnal feeding was a response to human
J. Acoust. Soc. Am., Vol. 119, No. 6, June 2006 Ichikawa et al.: Periodic attendance of vocalizing dugongs 3731disturbance rather than a normal pattern. Hines 共2002兲 per- tion of Basic Research Activities for Innovative Biosciences
formed several daytime aerial surveys around Talibong Is- of Japan.
land and reported that more individuals were found around
the hours of high tide than at low tide. Nocturnal feeding Adulyanukosol, K. 共1999兲. “Dugong, dolphin and whale in Thai waters,”
Proceedings of the 1st Korea-Thailand Joint Workshop on Comparison of
behavior was observed by Dung 共2003兲 in Vietnamese waters
Coastal Environment, Korea-, Thailand, pp. 5–15.
and Mukai et al. 共1999兲 in Thai waters. Anderson 共1986兲 Akamatsu, T., Wang, D., Wang, K., and Wei, Z. 共2001兲. “Comparison be-
observed dugong feeding behavior throughout the day, and at tween visual and passive acoustic detection of finless porpoises in the
night whenever conditions allowed. Yangtze River, China,” J. Acoust. Soc. Am. 109, 1723–1727.
Akamatsu, T., Wang, D., Wang, K., and Naito, Y. 共2005兲. “Biosonar behav-
The visual sightings during the daytime seems to con-
iour of free-ranging porpoises,” Proc. R. Soc. London, Ser. B, 272, 797–
flict with the acoustic recordings during the nighttime. Here 801.
arise two potential interpretations for this confliction. One is Anderson, P. K. 共1986兲. “Dugongs of Shark Bay, Australia–Seasonal Migra-
that the vocalization rates within each individual increased. tion, Water Temperature, and Forage,” Natl. Geogr. 2, 473–490.
Anderson, P. K. 共1995a兲. “Scarring and photo identification of dugongs
The other is that there were much more individuals staying 共Dugong dugon兲 in Shark Bay, Western Australia,” Aquatic Mammals 21,
around the monitored area. In both cases, it is well ascer- pp. 205–211.
tained fact that there had been more than one dugongs mak- Anderson, P. K., and Birtles, A. 共1978兲. “Behavior and ecology of the dug-
ing calls for over a long hours in the dark. In such situations, ong, dugong dugon 共Sirenia兲: Observations in shoalwater and Cleveland
Bays, Queensland,” Aust. Wildl. Res. 5, 1–23.
sound signals are good medium for information transmis- Anderson, P. K., and Barclay, R. M. R. 共1995b兲. “Acoustic signals of soli-
sion. If the dugong calls were used as a tool for interindi- tary dugongs: Physical characteristics and behavioral correlates,” J. Mam-
vidual information exchange, it is very important to investi- mal. 76, pp. 1226–1237.
gate the functions of the different call types. Long-term Braganza, O, N. P., and Prabhanada, B. S. 共1995兲. “Filtering noise from
slowly varying signals taking advantage of a fast ADC in data acquisi-
observation, improvement in the accuracy of the detection tion,” Meas. Sci. Technol. 6, 329–331.
software, and additional deployment of the recording sys- Chilvers, B. L., Delean, S., Gales, N. J., Holley, D. K., Lawler, I. R., Marsh,
tems would be needed to reveal the function of the dugong H., Preen, A. R. 共2004兲. “Diving behavior of dugongs, Dugong dugon,” J.
calls. Exp. Mar. Biol. Ecol. 304, 203–224.
Dung, P. H. 共2003兲. “The primary assessment on the Dugong population in
Viet Nam,” Proceedings of the 4th SEASTAR 2000 Workshop. pp. 64–71.
Hines, E. 共2002兲. “Conservation of the Dugong 共Dugong dugon兲 along the
V. CONCLUSIONS Andaman Coast of Thailand: An example of the integration of conserva-
tion and biology in endangered species research,” Ph.D. dissertation, De-
In summary, the dugongs in the waters to the south of partment of Geography, University of Victoria, Victoria, BC Canada.
Talibong Island, Thailand, visited the inshore areas near the Hines, E., Adulyanukosol, K., and Duffus, D., A. 共2005兲. “Dugong 共Dugong
seagrass primarily during the night. The attendance of the Dugon兲 Abundance along the Andaman Coast of Thailand,” Marine Mam-
animals showed a 24- to 25-h periodicity. More dugongs mal Sci. 21, 536–549.
Ichikawa, K., Akamatsu, T., Shinke, T., Arai, N., Hara, T., and Adulyanu-
utilized the inshore side of the monitored are during the neap kosol, K. 共2003兲. “Acoustical analyses on the calls of dugong,” Proceed-
tide 关MPI and Figs. 8共a兲–8共f兲兴. Long-term, highly accurate ings of the 4th SEASTAR 2000 Workshop, pp. 72–76.
monitoring and additional deployment of the AUSOMS-D Marsh, H., and Sinclair, D. F. 共1989兲. “An experimental evaluation of Dug-
ong and sea turtle aerial survey techniques,” Aust. Wildl. Res. 16, 639–
would greatly benefit the understanding of dugong ecology,
650.
in matters such as the interindividual contacts made by vocal Marsh, H., Eros, C., Corkeron, P., and Breen, B. 共1999兲. “A conservation
exchanges. strategy for dugongs: implications of Australia research,” Z. Gerontol.
Assuming that the above hypothesis is correct, effective Geriatr. 50, 979–990.
Marsh, H., Penrose, H., Eros, C., and Hugues, J. 共2002兲. “Dugong status
measures to prevent dugong bycatch would include regulat- report and action plans for countries and territories,” UNEP Early Warning
ing boat operation in the very early morning hours to avoid and Assessment Report Series Vol. 1, p. 162.
collisions, closing the mouth of set nets from midnight to Minami, S. 共1986兲. Kagakukeisoku No Tameno Hakei De-Tashori 共CQ Pub-
early morning or checking the set nets early in the morning lishing Co. Ltd., City兲, pp. 105–106 共in Japanese兲.
Mukai, H., Aioi, K., Lewmanomont, K., Matsumasa, M., Nakaoka, M.,
to rescue animals in case of bycatch, and operating a warning Nojima, S., Supanwanid, C., Suzuki, T., and Toyohara, T. 共1999兲. “Dug-
system that would alert anglers to the presence of dugongs. ong grazing on Halophila beds in Haad Chao Mai National Park, Trang
Province, Thailand—How many dugongs can survive?,” Effects of graz-
ing and disturbance by dugongs and turtles on tropical seagrass ecosys-
ACKNOWLEDGMENTS tems, pp. 239–254.
Nakaoka, M., and Aioi, K. 共1999兲. “Growth of the seagrass Halophila ovalis
We thank the National Research Council of Thailand, at the dugong trails compared to existing within-patch variation in a Thai-
the members of the Phuket Marine Biological Center, land intertidal flat,” Effects of grazing and disturbance by dugongs and
turtles on tropical seagrass ecosystems, pp. 255–267.
METOCEAN CO., LTD., System Intech Co., Ltd., the Na- Nakanishi, Y., Hosoya, S., Nakanishi, Y., Arai, N., and Adulyanukosol, K.
tional Research Institute of Fisheries Engineering, the Japan 共2005兲. “The distribution of dugong trenches in the seagrass beds of Li-
Fisheries Resource Conservation Association, and Biosphere bong Island, Thailand,” Journal of Advanced Marine Science and Tech-
nology Society 11, 53–57 共in Japanese兲.
informatics for support and cooperation. This study was
Niezrecki, C., Phillips, R., and Meyer, M. 共2003兲. “Acoustic detection of
funded in part by the cabinet office, a Grant-in-Aid for Sci- manatee vocalizations,” J. Acoust. Soc. Am. 114, 1640–1647.
entific Research No. 共16255011 and No. 1665808兲, the Infor- Preen, A. 共1998兲. “Marine protected areas and dugong conservation along
mation Research Center for Development of Knowledge So- Australia’s Indian Ocean coast,” Environ. Manage. 共N.Y.兲 22, 173–181.
Preen, A. 共2004兲. “Distribution, abundance and conservation status of dug-
ciety Infrastructure, the Ministry of Education, Culture, ongs and dolphins in the southern and western Arabian Gulf,” Biol. Con-
Sports, Science and Technology, and the Bio-oriented Tech- serv. 118, 205–218.
nology Research Advancement Institution 共BRAIN兲 Promo- Shinke, T., Shimizu, H., Ichikawa, K., Arai, N., Matsuda, A., and Akamatsu,
3732 J. Acoust. Soc. Am., Vol. 119, No. 6, June 2006 Ichikawa et al.: Periodic attendance of vocalizing dugongsT. 共2004兲. “Development of automatic underwater sound monitoring sys- passive acoustical method using an underwater recording system” J. tem version 1,” Proceedings of The 2004FY Annual Meeting of the Marine Acoust. Soc. Am.共submitted兲. Acoustics Society of Japan, pp. 33–36. Wang, K., Wang, D., Akamatsu, T., Li, S., and Xiao, J. 共2005兲. “A passive Tsutsumi, C., Ichikawa, K., Arai, N., Akamatsu, T., Shinke, T., Hara, T., and acoustical monitoring method applied to observation and group size esti- Adulyanukosol, K. “Feeding behavior of wild dugongs monitored by a mation of finless porpoises,” J. Acoust. Soc. Am. 118, 1180–1185. J. Acoust. Soc. Am., Vol. 119, No. 6, June 2006 Ichikawa et al.: Periodic attendance of vocalizing dugongs 3733
You can also read