Binary CAM Search v2.2 - LogiCORE IP Product Guide Vivado Design Suite - Xilinx
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Binary CAM Search v2.2 LogiCORE IP Product Guide Vivado Design Suite PG317 (v2.2) July 27, 2021

Table of Contents
Chapter 1: Introduction.............................................................................................. 4
Features........................................................................................................................................ 4
IP Facts..........................................................................................................................................5
Chapter 2: Overview......................................................................................................6
Navigating Content by Design Process.................................................................................... 8
Licensing and Ordering.............................................................................................................. 8
Chapter 3: Product Specification......................................................................... 10
Scheduling..................................................................................................................................11
Lookup Operation..................................................................................................................... 12
Table Management................................................................................................................... 12
Error Correction Coding (ECC)................................................................................................. 12
Performance.............................................................................................................................. 13
Port Descriptions.......................................................................................................................15
Register Address Space............................................................................................................ 17
Chapter 4: Designing with the Core................................................................... 19
General Design Guidelines.......................................................................................................19
Clocking...................................................................................................................................... 22
Resets..........................................................................................................................................23
Chapter 5: Design Flow Steps.................................................................................24
Customizing and Generating the Core................................................................................... 24
Constraining the Core...............................................................................................................34
Simulation.................................................................................................................................. 35
Synthesis and Implementation................................................................................................36
Chapter 6: Example Design..................................................................................... 37
Simulating the Example Design.............................................................................................. 38
Chapter 7: Software Application Example Design......................................40
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 2
Running the Software Application Example Design............................................................. 41
Appendix A: Upgrading............................................................................................. 42
Appendix B: Debugging.............................................................................................43
Finding Help on Xilinx.com...................................................................................................... 43
Debug Tools............................................................................................................................... 44
Simulation Debug......................................................................................................................45
Hardware Debug....................................................................................................................... 46
General Checks.......................................................................................................................... 46
Appendix C: Additional Resources and Legal Notices............................. 48
Xilinx Resources.........................................................................................................................48
Documentation Navigator and Design Hubs.........................................................................48
References..................................................................................................................................48
Training Resources....................................................................................................................49
Revision History......................................................................................................................... 49
Please Read: Important Legal Notices................................................................................... 50
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 3
Chapter 1: Introduction
Chapter 1
Introduction
The Binary CAM Search LogiCORE IP (BCAM) implements an associative array data structure
also known as a content-addressable memory. The BCAM stores (key, response) entries with
arbitrary key and response bit strings and allows the retrieval of the response based on an exact
match of all bits in the search key with all bits in key.
Features
• Associative array containing arbitrary (key, response) entries.
• Exact match key lookup returns hit/miss result and associated response value on hit.
• High throughput: one lookup per clock cycle up to 600 MHz.
Note: Achievable clock frequencies will depend on the device being used, the resources used by the
CAM configuration, and the congestion in the device.
• Flexible, supports a wide range of key widths, response widths and lookup rates with
optimized resource utilization.
• Supports all key widths up to 992 bits and all response widths up to 1024 bits.
• Supports both UltraRAM (URAM) and block RAM implementations.
• Scalable, supports one or multiple BCAM instances, each instance can use all block RAM/
UltraRAM (URAM) within an SLR allowing very large BCAMs.
• High storage efficiency, 95% of the RAM bits are transformed to CAM bits.
• Supports error correction coding (ECC). Single-bit errors are corrected dynamically during
lookups, and permanently with patrol scrubbing.
• Supports Vivado® IP integrator.
• Supports entry insert, delete, update using standard TCAM like software APIs.
• Can be inferred from within P4 code using the Vitis™ Networking P4 (VitisNetP4) tool.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 4Chapter 1: Introduction
IP Facts
LogiCORE™ IP Facts Table
Core Specifics
Supported Device Family1 UltraScale™, UltraScale+™, Zynq® UltraScale+™, Versal™ ACAP
Supported User Interfaces AXI4-Stream and AXI4-Lite Interfaces
Resources See the CAM Configuration Information section in the Main Tab topic.
Provided with Core
Design Files Encrypted Verilog RTL
Example Design Verilog
Test Bench Verilog
Constraints File Xilinx Design Constraint (XDC)
Simulation Model Verilog source code
Supported S/W Driver2 Standalone
Software Example Design Application Standalone, Vivado® IP integrator
Tested Design Flows3
Design Entry4 Standalone, VitisNetP4, Vivado® IP integrator
Simulation5 For supported simulators, see the Xilinx Design Tools: Release Notes Guide.
Synthesis Xilinx Vivado Synthesis
Support
Release Notes and Known Issues Master Answer Record: 59718
All Vivado IP Change Logs Master Vivado IP Change Logs: 72775
Xilinx Support web page
Notes:
1. For a complete list of supported devices, see the Vivado® IP catalog.
2. Standalone driver details can be found online.
3. For the supported versions of the tools, see the Xilinx Design Tools: Release Notes Guide.
4. The CAM IP is only supported in the Vivado IP Catalog running on a Linux operating system (not supported on
Windows).
5. Modelsim, Questa, VCS, Xcelium, and Xsim are supported. Refer to Vivado Design Suite User Guide: Release Notes,
Installation, and Licensing (UG973) for information on version compatibility.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 5Chapter 2: Overview
Chapter 2
Overview
The Binary CAM Search IP core (BCAM) is a member of the family of CAMs provided by Xilinx®.
The family consists of four members:
• Binary CAM (BCAM): Described in this document. Used for exact matching. Entry storage is
provided in UltraRAM or block RAM.
• Semi TCAM (STCAM): The STCAM is fully flexible in terms of number, size and position of
wildcard (don't care) fields. Every key bit has a corresponding mask bit. The number of allowed
unique masks is however limited. This allows for considerable memory and logic optimizations.
See the Semi-Ternary CAM Search LogiCORE IP Product Guide (PG319).
• Ternary CAM (TCAM): The primary usage of TCAM is for tables requiring full flexibility in
terms of size and position of wildcard (don't care) fields. Every key bit has a corresponding
mask bit stored together with the key. All entries can have different masks. TCAMs are used
for Access Control List (ACL) type lookups, requiring a large number of different masks. See
the Ternary CAM Search LogiCORE IP Product Guide (PG318).
One or multiple instances of each type can be used inside the same FPGA. Different types can
also be mixed inside the same FPGA. Each CAM type is optimized for its specific task in terms of
hardware resource usage and can be flexibly configured using VitisNetP4 or the IP integrator.
The BCAM stores {key, response} entries in either URAM or block RAM. The BCAM provides
efficient use of FPGA resources, in contrast with basic BCAM implementations that store the
keys in flip-flops and use logic resources for parallel key comparison.
The Lookup interface of the BCAM receives a lookup key and outputs a result that contains a
match flag indicating whether the lookup key matches the key of any entry in the BCAM. If any
BCAM entry is matched, the response value of the matching entry is output. The BCAM is
pipelined so that it can process a Lookup Request every clock cycle.
The entries are read and written using a set of high-level Application Programming Interface (API)
functions. The API functions are written in C and delivered as part of the IP. The API
encapsulates the details of memory management and register access and provides a simple and
efficient management interface. The API software with detailed documentation is found in the
CAM IP product page. The user provides the functions for basic hardware reads and writes to the
API. This allows for flexible hardware mapping and the communications link between the API
software and the hardware is designed to the users' specifications. The communication link could
for instance be AXI4-Lite or PCIe.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 6Chapter 2: Overview
The BCAM design is highly configurable at compile time to make it suitable for a large variety of
applications. The table below lists the configuration parameters.
Table 1: Configuration Parameters
Parameter Name Valid Range Description
The width of the lookup key. KEY_WIDTH +
KEY_WIDTH 10-992 bits RESPONSE_WIDTH + 1 cannot exceed 1536/1024 [block
RAM/URAM].
The width of the lookup response. KEY_WIDTH +
RESPONSE_WIDTH 1-1024 bits RESPONSE_WIDTH + 1 cannot exceed 1536/1024 [block
RAM/URAM].
The number of usable entries (depth). To generate a
BCAM with a certain memory depth, .(for example 4K),
NUM_ENTRIES 1 - 1.25M
specify 95% of the target NUM_ENTRIES = 0.95 x 4096 =
3891
BLOCK or ULTRA or The compiler selects the best suited type automatically.
MEMORY_PRIMITIVE
AUTO This can however be overridden as a user preference.
This is the supported lookup rate of the instance
(expressed in million Lookups per second). In order to
LOOKUP_RATE 15 - 600 Mlps
save resources it is important not to set the lookup rate
higher than required.
This is the clock frequency of the Lookup Request and
LOOKUP_INTERFACE_FREQ 15-600 MHz response interfaces.
LOOKUP_INTERFACE_FREQ >= LOOKUP_RATE
This is the clock frequency of the memories and the
internal datapath. An optional, high frequency RAM
clock enables time division of the hardware resources,
RAM_FREQ 15-600 MHz leading to significant savings. See the TDM_FACTOR
parameter.
RAM_FREQ >= LOOKUP_INTERFACE_FREQ
The TDM_FACTOR is calculated from the ratio:
RAM_FREQ / LOOKUP_RATE
TDM_FACTOR 1, 2, or 4 The ratio is rounded downwards to the nearest power
of two and capped based on NUM_ENTRIES. This
further described in Resource Time Sharing.
The use of a separate RAM clock is optional. If
RAM_FREQ = LOOKUP_INTERFACE_FREQ, then the single
SINGLE-CLOCK or
CLOCKING_MODE clock mode is enabled. In single clock mode only the
DUAL_CLOCK
lookup interface clock is used for lookup interfaces,
RAM and match logic.
All of these parameters are extracted from the P4 code and VitisNetP4 tool during compilation. If
the BCAM is used without P4, these parameters are set in the IP Generator prior to generating
the BCAM hardware and software BCAM API. VitisNetP4 ensures that the parameters used to
generate the hardware BCAM and those used to create the software BCAM are synchronized.
For standalone usage, the user must guarantee that the parameters used to generate the
hardware BCAM and the parameters used to call the software BCAM are identical.
Related Information
Resource Time Sharing
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 7Chapter 2: Overview
Navigating Content by Design Process
Xilinx® documentation is organized around a set of standard design processes to help you find
relevant content for your current development task. All Versal™ ACAP design process Design
Hubs can be found on the Xilinx.com website. This document covers the following design
processes:
• Hardware, IP, and Platform Development: Creating the PL IP blocks for the hardware
platform, creating PL kernels, functional simulation, and evaluating the Vivado® timing,
resource use, and power closure. Also involves developing the hardware platform for system
integration. Topics in this document that apply to this design process include:
• Port Descriptions
• Clocking
• Customizing and Generating the Core
Licensing and Ordering
This Xilinx® LogiCORE™ IP module is provided under the terms of the Xilinx Core License
Agreement. For full access to all core functionalities in simulation and in hardware, you must
purchase a license for the core. To generate a full license, visit the product licensing web page.
Evaluation licenses and hardware timeout licenses might be available for this core. Contact your
local Xilinx sales representative for information about pricing and availability.
Note: To verify that you need a license, check the License column of the IP Catalog. Included means that a
license is included with the Vivado® Design Suite; Purchase means that you have to purchase a license to
use the core.
For more information about this core, visit the Binary CAM Search IP product web page.
Information about other Xilinx® LogiCORE™ IP modules is available at the Xilinx Intellectual
Property page. For information about pricing and availability of other Xilinx LogiCORE IP modules
and tools, contact your local Xilinx sales representative.
Licensing information is available on the CAM IP product page.
License Checkers
If the IP requires a license key, the key must be verified. The Vivado® design tools have several
license checkpoints for gating licensed IP through the flow. If the license check succeeds, the IP
can continue generation. Otherwise, generation halts with an error. License checkpoints are
enforced by the following tools:
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 8Chapter 2: Overview
• Vivado Synthesis
• Vivado Implementation
• write_bitstream (Tcl command)
IMPORTANT! IP license level is ignored at checkpoints. The test confirms a valid license exists. It does not
check IP license level.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 9Chapter 3: Product Specification
Chapter 3
Product Specification
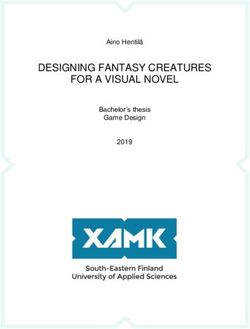
The functional block diagram of the core is shown in the following figure.
Figure 1: Core Block Diagram
Lookup Request Lookup Response
Interface Interface
AXI4-Stream AXI4-Stream
Slave Master
Lookup Interface Frequency
FIFO RAM Frequency FIFO
Strict CAM
Priority Database
Scheduler Registers &
Memory
RAM Frequency
FIFO AXI4-Lite Frequency FIFO
Mgmt Request Mgmt Response
Interface Interface
AXI4-Slave
AXI4-Lite
API Software
X21980-062420
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 10Chapter 3: Product Specification
The previous figure contains the following sub-blocks:
• CAM Database: Memory and registers for storage of rules and logic for algorithmic lookup
matching.
• AXI4-Stream Slave: Protocol handling, including flow control, for Lookup Requests.
• AXI4-Stream Master: Protocol handling, including flow control, for Lookup Responses.
• Lookup Request FIFO (Optional): Transfers Lookup Requests from the Lookup Frequency
domain to the RAM Frequency domain.
• Lookup Response FIFO (Optional): Transfers Lookup Responses from the RAM Frequency
domain to the Lookup Frequency domain.
• Management Request FIFO: Buffering queue for input Management Requests.
• Management Response FIFO: Buffering queue for Management Responses.
• Strict Priority Scheduler: Schedules Lookup and Management Requests.
• AXI4-Lite interface slave: Protocol handling for accepting read/write requests and generating
responses. The AXI4-Lite interface uses 13 bits of address and 32 bits of data.
The following clock domains are depicted in the block diagram:
• AXI4-Stream Lookup Interface Frequency: The clock frequency of the Lookup Request/
Response interfaces. Depending on configuration parameters a new Lookup Request may be
processed every cycle, every second cycle, every fourth cycle, etc.
• RAM Frequency: The clock frequency of the internal RAM and match logic.
• AXI4-Lite Frequency: The clock frequency of the AXI Lite bus.
The clocking of the CAM can be set to one of two modes:
• Single Clock Mode: If the Lookup Interface Frequency and RAM Frequency are equal, then the
RAM clock is not used and the Lookup Request/Response FIFOs are removed completely.
• Dual Clock Mode: If the RAM Frequency is higher than the Lookup Interface Frequency,
shallow FIFOs are inserted to bridge the clock domains.
Scheduling
The Strict Priority Scheduler always selects a request from the Lookup Request FIFO first. A
request can only be scheduled from the Management Request FIFO when the Lookup Request
FIFO is empty.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 11Chapter 3: Product Specification
When the Management Request FIFO becomes full, the AXI4-Slave stops accepting new
Management Requests to prevent loss of Management Requests.
For every Lookup Request processed by the CAM database a Lookup Response is generated. The
Lookup Response is sent to the Lookup Response Interface. For a read Management Request, the
response is sent to the Management Response Interface. Write Management Requests do not
generate a Management Response. The Management Response Interface can only buffer one
management response. The AXI4-Slave blocks the CPU read operation until the Management
Response is available and sent on the AXI4-Lite interface.
Lookup Operation
The CAM Database stores the (key, response) entries and performs matching by processing a
Lookup Request. If the lookup key matches the key of any entry, there is a match and the
response is output. The API software ensures that two entries using identical keys cannot be
inserted. If the lookup key does not match the key of any entry, a no match indication is output
together with a default response. The default response entry is a special entry without any key
part. The key part is not necessary since this entry always matches if no other entry is matched.
Table Management
In addition to processing Lookup Requests, the CAM Database also processes Management
Requests. The CAM Database is fully pipelined. If the TDM factor is one, a new Lookup Request
is processed every RAM clock cycle. If the TDM factor is two, a Lookup Request takes two RAM
clock cycles to complete, and so on. The CAM Database can process one Management Request
in a single RAM clock cycle, independent of the TDM factor.
Error Correction Coding (ECC)
All memories in the CAM database are ECC protected. There are eight additional ECC bits for
every address in a 64-bit wide memory. The eight additional bits are only used for ECC and can
not be used for storage. 64-bit wide memories are always referred in this document (even though
72 bits are used).
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 12Chapter 3: Product Specification
A scrubbing mechanism starts regularly (approximately 1 ms interval) and reads every memory
address of the CAM in the background using idle cycles. If a single-bit error is detected during
scrubbing, the error is corrected permanently by writing the corrected data back to the memory.
Single-bit errors detected during lookup operations are corrected dynamically. If a double-bit
error is detected during lookup, there will be no match. In general, if double-bit errors are
detected during lookups it is recommended to drop the packet issuing the lookup. There are two
statistic counters for ECC:
• Single-bit errors: This counter increments for errors detected and corrected during scrubbing.
• Double-bit errors: This counter increments for double-bit errors detected during scrubbing.
The address of the first failing RAM location is stored in a register for diagnostic purposes. There
are two status outputs related to ECC: Single-bit/double-bit error detected. The outputs are valid
for one cycle (Lookup Interface clock domain) whenever an error is detected by the ECC
scrubber. The status outputs can be used to trigger a CPU interrupt. When the CPU reads the
statistics counters the counters are cleared.
The software API provides a debug function to enable insertion of single-bit/double-bit errors
during write operations. With the error insertion enabled, subsequent insert/update/delete
operations will store data in memory with errors. Note that it takes up to 2 ms before the ECC
scrubber detects the errors which can be observed on the status outputs / error counters.
Performance
Maximum Frequencies
The Binary CAM Search IP is designed to run at up to 600 MHz in UltraScale+™-2 speed grade
devices.
Latency
The BCAM lookup latency depends on the size of the BCAM the RAM_FREQ / LOOKUP_RATE
ratio and the memory type. The lookup latency is constant and some examples are shown in the
following table.
Table 2: Lookup Latency [Block RAM / UltraRAM]
Entries RAM Clock 1x RAM Clock 4x RAM Clock 16x RAM Clock 32x
256 16/17 13/14 9/9 8/8
1K 16/17 14/14 9/9 8/8
4K 18/17 14/14 9/9 8/8
16K 21/18 14/14 9/9 8/8
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 13Chapter 3: Product Specification
Note: Latency values are measured in Lookup Interface Frequency cycles.
Note: KEY_WIDTH = 32, RESPONSE_WIDTH = 16, LOOKUP_RATE = LOOKUP_INTERFACE_FREQ.
Throughput
The lookup throughput corresponds to the LOOKUP_RATE parameter. The highest possible
lookup throughput is accomplished when LOOKUP_RATE equals the RAM _FREQ parameter.
One Lookup Request can then be issued per RAM clock cycle. The Management Request has
strictly lower priority than the Lookup Request, consequently the Management Request
throughput becomes:
Management Request Rate = RAM_FREQ - LOOKUP_RATE*TDM_FACTOR
The ECC scrubbing process has the lowest priority. A memory read followed by a potential
corrective write is only executed if both the Lookup Request and Management Request FIFOs
are empty. Neither the lookup throughput nor the Management Request throughputs are
affected. ECC scrubbing of a new address is only initiated if both FIFOs are empty and a potential
pending corrective write has been executed.
All read and write Management Requests are 32 bits wide. The only exception is for write
Management Request of entry data. These Management Requests might be wider as described in
the section below. The Management Request width for entry data is essential for correct
dimensioning of the lookup rate and RAM frequency in order to have throughput headroom for
Management Requests.
In order to perform management updates while maintaining correct state for lookups, the
management operations need to be atomic. This means that a complete entry must be written to
the CAM Database before the entry is made active (valid). To accomplish wide writes, an entry is
written using multiple Management Requests where the last Management Request sets the valid
bit. When an already existing entry is being updated, the valid bit is already set. This means that
the response data needs to be written using only a single Management Request. For this reason a
Management Request writes at least (response + valid) width bits of data. The total width is
rounded upwards to the next 64-bit boundary. For a 160-bit key with 72 bits of response + valid,
assume that the following is written:
• Key, 160 bits
• Response + Valid, 72 bits
In total, 232 bits are written. The width of response + valid is 72 bits, this will be rounded to 128
bits. Each Management request writes 128 bits. With rounding up, 232/128 = 2 write
Management Requests are sent.
The AXI4-Lite bus uses 13 bits of address and 32 bits of data, so for every Management Request
multiple AXI4-Lite writes are issued from the API software. The AXI4-Lite writes are assembled
by the AXI4-Slave to a single Management Request. The AXI4-Lite interface is a standard type.
Refer to AXI4-Lite IPIF LogiCORE IP Product Guide (PG155).
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 14Chapter 3: Product Specification
The following table shows an example calculation for 100Gb Ethernet rate. Keep in mind the
calculated update rate only refers to the hardware resources, the final update rate is most likely
limited by the table management software.
Table 3: 100GbE Update Rate Example Calculation (hardware limit)
Management Update rate
Management Request Size AXI Lite Write Operations
[bits] [min / max] [M updates/s]
64 1/3 4.8
128 2/5 2.4
256 4/9 1.2
512 8 / 17 0.6
1024 16 / 33 0.3
Note: Parameters used in this example: LOOKUP_RATE = 148.8, RAM_FREQ = 600, TDM_FACTOR = 4
Note: AXI Lite minimum values apply when the write data is constant (for example initializing to zero).
Maximum values applies for general write data pattern.
Port Descriptions
System Interface Ports
Table 4: System Interface
Port Name I/O Clock Description
Asynchronous reset (active_low). The reset input is
rstn I synchronized internally to both the ram_clk and key_clk
domains.
Reset Busy is an active high indicator that the core is
rst_busy O s_axi_aclk
currently in reset state.
The ram clock is used for the internal RAM and match
ram_clk I
logic.
Single-bit error output status. A single-bit error has
sbiterr O key_clk been detected and corrected by the ECC scrubbing
mechanism.
Double-bit error output status. A double-bit error has
dbiterr O key_clk
been detected by the ECC scrubbing mechanism.
debug_status[31:0] O Debug status port.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 15Chapter 3: Product Specification
Lookup Interface Ports
Table 5: Lookup Interface
Port Name I/O Clock Description
s_axis_lkup_tdata The Lookup Request key. tdata is padded with zeros to
I key_clk
[S_LKUP_WIDTH-1:0] a byte multiple length.
tready indicates that the core is ready to accept lookup
requests. The ratio of LOOKUP_INTERFACE_FREQ and
LOOKUP_RATE determines how frequently new lookups
s_axis_lkup_tready O key_clk
can be started. If LOOKUP_INTERFACE_FREQ equals
LOOKUP_RATE than lookups can be started every clock
cycle without gaps.
Indicates that the lookup request key is valid. A lookup
s_axis_lkup_tvalid I key_clk is initiated when both tready and tvalid are high for one
clock cycle.
m_axis_lkup_tdata
O key_clk The response value associated with the matching entry.
[M_LKUP_WIDTH-1:0]
tready for M_AXIS_DATA channel. Tie high if the
m_axis_lkup_tready O key_clk downstream slave is always able to accept data from
M_AXIS_DATA.
m_axis_lkup_tvalid I key_clk tvalid for M_AXIS_DATA channel
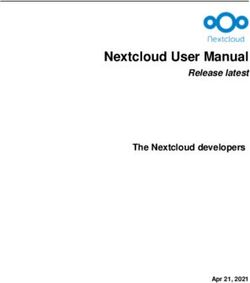
Figure 2: s_axis_lkup_data
MSB 0
Zero LookupKey
Padding KEY_WIDTH
S_LKUP_WIDTH-1 S_LKUP_KEY_POS
X24118-061120
S_LKUP_KEY_POS = 0
S_LKUP_WIDTH = 8 x floor((KEY_WIDTH + 7) / 8)
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 16Chapter 3: Product Specification
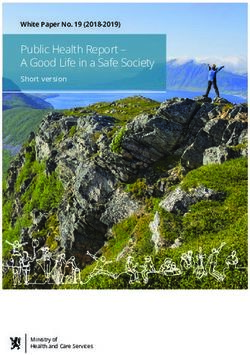
Figure 3: m_axis_lkup_data
MSB 0
Double-bit
Zero LookupKey Zero MatchFlag Zero ResponseValue
Error
Padding KEY_WIDTH Padding 1 Padding RESPONSE_WIDTH
1
M_LKUP_WIDTH-1 M_LKUP_KEY_POS M_LKUP_FLAG_POS M_LKUP_RESP_POS
X24119-072121
M_LKUP_RESP_POS = 0
M_LKUP_FLAG_POS = 8 x floor((RESPONSE_WIDTH + 7) / 8)
M_LKUP_KEY_POS = 8 x (1 + floor(RESPONSE_WIDTH + 7) / 8)
M_LKUP_WIDTH = 8 x (floor(KEY_WIDTH + 7) / 8) + 2 + floor(RESPONSE_WIDTH + 7) / 8))
New AXI- response flag for lookup ECC double-bit errors, located after the MatchFlag.
Figure 4: Lookup Interface Timing Diagram
Register Address Space
You must provide a hardware write and hardware read function for the API software to call once
it needs to access the hardware. The hardware write and read functions use address, data and a
user specified context as arguments. The data is 32 bits wide and the address is 13 bits wide. The
context can be used to differentiate multiple instances and thus allow the same functions to be
used for multiple instances. The user of the API software must map the 13-bit wide address
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 17Chapter 3: Product Specification
space used by each BCAM instance to a hardware base address in both the hardware write and
read functions. The BCAM is accessed through the API and the register space is fully abstracted
and therefore not listed. You do not need to directly access the registers in the IP; the driver
supplied with the IP interfaces to the hardware under the hood and therefore direct accesses are
not required.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 18Chapter 4: Designing with the Core
Chapter 4
Designing with the Core
This chapter includes guidelines and additional information to facilitate designing with the core.
General Design Guidelines
Implementation in Block RAM vs. UltraRAM
The BCAM requires at least four RAM read accesses independently of the BCAM size. For small
BCAMs it is therefore beneficial to use block RAM. Each RAM has associated logic, therefore as
the BCAM size increases, less logic resources will be used if the total number of RAMs is kept
low. This can be accomplished by using deeper RAMs such as UltraRAM (URAM), or depth
cascaded RAMs. The API software calculates and automatically selects the optimum solution in
terms of hardware resources. In addition to automatic optimization, the user can also direct the
configuration to minimize either logic resources or RAM resources. If the target device has more
spare capacity for a certain RAM type, the MEMORY_PRIMITIVE parameter can be forced to this
RAM type even if it is less efficient, because it will provide better overall device utilization.
Quantification Loss
When an instance is generated, the total width of an entry is calculated:
Entry Width = KEY_WIDTH + RESPONSE_WIDTH + Valid
The valid bit adds one extra bit to the entry width. The total entry width is then mapped to the
required number of block RAMs or URAMs necessary to read the entire entry in parallel. Block
RAM and URAM are allocated in data width increments of 64 bits. To minimize quantification
losses, it is beneficial if the entry size is close below or on a 64-bit boundary. For example, if the
total entry size is 308 bits, the quantification loss is 12 bits per entry:
5*64 - 308 = 12
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 19Chapter 4: Designing with the Core
Quantification loss does not only occur when the entry width does not align to 64-bit
boundaries. It also occurs when NUM_ENTRIES does not match the RAM address space
perfectly. For example, TDM_FACTOR = 1, MEMORY PRIMITIVE = BLOCK, NUM_ENTRIES =
1500. For this BCAM four block RAMs are required. Four block RAMs provide 2048 *0.95 =
1945 entries. Loss = (1945-1500)/1945 = 23%
The maximum supported entry widths are listed in the following table.
Table 6: Maximum Supported Entry Widths
DEPTH MEMORY_PRIMITIVE ENTRY_WIDTH
512 BLOCK 1536
1024 BLOCK 7681
2048 BLOCK 3841
2048 ULTRA 2048
4096 ULTRA 1024
8192 ULTRA 512
16384 ULTRA 2561
Notes:
1. Not available for RAM_FREQ over 400 MHz.
Storage Efficiency
Up to 95% of the RAM addresses can be used for storage.
Resource Time Sharing
The CAM Database is designed to run at a clock frequency of up to 600 MHz and process one
Lookup Request every clock cycle. A search operation requires a minimum of four RAM accesses.
The RAM accesses can be performed in parallel using multiple RAM instances, sequentially by
performing multiple accesses in the same RAM, or by a combination of both parallel and
sequential access. For example if the RAM Frequency is 600 MHz and the Lookup rate is 300M
Lookups per second, two accesses can be performed using the same RAM.
The possible amount of time sharing of the RAM is calculated using integer division:
TDM_FACTOR = RAM_FREQ / LOOKUP_RATE
The TDM_FACTOR is rounded down to the nearest power of two and capped at four. The
following values are allowed: 1, 2, and 4.
The CAM depth also determines how much time sharing is necessary, as detailed in the following
table.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 20Chapter 4: Designing with the Core
Table 7: TDM_FACTOR calculations
NUM_ENTRIES [BRAM/
LOOKUP_RATE [Mlps] RAM_CLOCK [MHz] TDM_FACTOR
URAM]
973/7783 Up to 150 Minimum 4 x LOOKUP_RATE 4
2919/23348 Up to 300 Minimum 2 x LOOKUP_RATE 2
Up to 1.25M Up to 600 LOOKUP_IF_FREQ 1
• Lookup rates above 300 Mlps: Time sharing of the RAM is not possible because it would
require a RAM_FREQ higher than the maximum supported 600 MHz.
• Lookup rates up to 300 Mlps and NUM_ENTRIES up to 2919/23348 [BRAM/URAM]: It is
beneficial to perform sequential lookups in the same RAM to save hardware logic resources
using TDM_FACTOR 2 or 4.
• NUM_ENTRIES larger than 2919/23348 [BRAM/URAM]: Time sharing is not required to
provide the minimum required four RAM accesses.
Table 8: Clock Configuration Examples
Lookup
RAM clock
Lookup Rate Interface
Ethernet Speed frequency Clocking Mode TDM Factor
[Mlps] Frequency
[MHz]
[MHz]
10G 15 15 15 SINGLE_CLOCK 1
10G 15 30 30 SINGLE_CLOCK 2
10G 15 30 60 DUAL_CLOCK 4
100G 150 150 150 SINGLE_CLOCK 1
100G 150 300 300 SINGLE_CLOCK 2
100G 150 300 600 DUAL_CLOCK 4
400G 600 600 600 SINGLE_CLOCK 1
Registering Signals
To simplify timing and increase system performance in a programmable device design, keep all
inputs and outputs registered between the user application and the core. This means that all
inputs and outputs from the user application should come from, or connect to, a flip-flop. While
registering signals might not be possible for all paths, it simplifies timing analysis and makes it
easier for the Xilinx® tools to place and route the design.
Make Only Allowed Modifications
You should not modify the core. Any modifications can have adverse effects on system timing
and protocol compliance. Supported user configurations of the core can only be made by
selecting the options in the customization IP dialog box when the core is generated.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 21Chapter 4: Designing with the Core
Update Performance
The API software is single threaded and uses one core for its processing.
Changes to the CAM database are made using the insert, update, or delete functions. The
required processing for these operations increases with the fill level of the CAM database. The
required processing increases CAM width but does not increase with CAM depth. The insert
function is twice as fast as the update and delete functions.
Configuration Example
The performance of the configuration listed below is 200k inserts per second.
• Key size = 32, response size = 16
• CAM database = 100,000 keys
• CAM database is empty and then filled with 100,000 keys
• CPU=i7-7600U, 2.80 GHz. 4 MB 16-way set associative shared cache
Clocking
Table 9: Clocks
Clock Description
The AXI clock is used for table management. The AXI management interface has a completely
s_axi_aclk
asynchronous relationship with the lookup interface.
key_clk AXI4-Stream clock for Lookup Request/Response interfaces.
The ram_clk is optional. It provides an option to clock the internal RAM and match logic on a separate
high frequency clock. In most cases this saves logic and memory resources.
Guideline:
ram_clk
• key_clk 300 MHz, ram_clk is not used
Related Information
Performance
Single Clock Mode
Single clock mode is activated by specifying the same value for both
LOOKUP_INTERFACE_FREQ and RAM_FREQ. The ram_clk port is not used in single clock
mode. The Lookup interfaces, internal RAM and match logic are all clocked on the key_clk.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 22Chapter 4: Designing with the Core
Note: Single clock mode is recommended for Lookup rates above 300 Mlps.
Dual Clock Mode
In dual clock mode the internal RAM and match logic is clocked on a separate high frequency
clock ram_clk. This enables a high TDM_FACTOR to be used without increasing the frequency
of the Lookup Interface.
Note: Both ram_clk and key_clk must be derived from the same PLL in order to avoid clock drift.
TDM Factor Settings for Clock Modes
The following table shows the difference in LOOKUP_INTERFACE_FREQ for SINGLE_CLOCK
and DUAL_CLOCK modes.
Table 10: TDM Factor Settings for Clock Modes
LOOKUP
LOOKUP RATE
TDM Factor INTERFACE FREQ RAM CLOCK [MHz] CLOCKING MODE
[Msps]
[MHz]
4 Up to 150 Minimum LOOKUP_IF_FREQ SINGLE CLOCK
4xLOOKUP_RATE
4 Up to 150 Minimum Minimum DUAL CLOCK
LOOKUP_RATE 4xLOOKUP_RATE
2 Up to 300 Minimum LOOKUP_IF_FREQ SINGLE CLOCK
2xLOOKUP_RATE
2 Up to 300 Minimum Minimum DUAL CLOCK
2xLOOKUP_RATE 2xLOOKUP_RATE
1 Up to 600 LOOKUP_IF_FREQ LOOKUP_IF_FREQ SINGLE CLOCK
Note: Dual clock mode is recommended for Lookup rates up to 300 Mlps.
Resets
At startup, both the AXI reset and the main reset must be asserted simultaneously for four cycles
of the slower of the two clocks (s_axi_aclk and key_clk). As long as the reset assertion time
is met, either reset can be asserted or negated first. The system is not ready to use until the reset
phase is finished (indicated by the rst_busy output). The rst_busy output is high for
approximately 30 clock cycles (slowest clock).
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 23Chapter 5: Design Flow Steps
Chapter 5
Design Flow Steps
This chapter describes customizing and generating the core, constraining the core, and the
simulation, synthesis and implementation steps that are specific to this IP core. More detailed
information about the standard Vivado® design flows and the IP integrator can be found in the
following Vivado® Design Suite user guides:
• Vivado Design Suite User Guide: Designing IP Subsystems using IP Integrator (UG994)
• Vivado Design Suite User Guide: Designing with IP (UG896)
• Vivado Design Suite User Guide: Getting Started (UG910)
• Vivado Design Suite User Guide: Logic Simulation (UG900)
Customizing and Generating the Core
This section includes information about using Xilinx® tools to customize and generate the core in
the Vivado Design Suite. Following are instructions on how to deploy the CAMs using the CAM
IP standalone. The CAMs can also be deployed as part of VitisNetP4 systems. For instructions on
how to deploy in VitisNetP4, see the Vitis Networking P4 User Guide (UG1308) (registration
required).
CAM IP version 2.2 (cam_v2_2) is released as part of the Vivado 2021.1 release. The CAM IP
can be instantiated in Vivado in two different ways; using the IP integrator or using the IP
Catalog. CAM IP versions must be used with the equivalent versions of the Vivado tool. For
example, CAM IP v2.2 must be paired with Vivado version 2021.1.
IP Integrator
If you are customizing and generating the core in the Vivado IP integrator, see the Vivado Design
Suite User Guide: Designing IP Subsystems using IP Integrator (UG994) for detailed information. IP
integrator will auto-compute certain configuration values when validating or generating the
design. To check whether the values change, see the description of the parameter in this chapter.
To view the parameter value you can run the validate_bd_design command in the Tcl
Console.
To instantiate the CAM IP in Vivado Design Suite using IP integrator, follow these steps:
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 24Chapter 5: Design Flow Steps
1. Open a project in the Vivado tool.
2. Click Create Block Design in the panel on the left.
3. Right-click in the Diagram window and select Add IP.
4. Search for "cam" in the search box of the window that appears and select CAM IP.
5. The CAM IP can be configured by double-clicking the instantiated IP.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 25Chapter 5: Design Flow Steps
IP Catalog
You can customize the IP for use in your design by specifying values for the various parameters
associated with the IP core using the following steps:
1. Select the IP from the IP catalog.
2. Double-click the selected IP or select the Customize IP command from the toolbar or right-
click menu.
For details, see the Vivado Design Suite User Guide: Designing with IP (UG896) and the Vivado
Design Suite User Guide: Getting Started (UG910).
To instantiate the CAM IP using the IP Catalog, follow these steps:
1. Open a project in Vivado.
2. Click IP Catalog in the panel on the left. Search for "cam" in the search box of the IP Catalog
window and select CAM IP.
3. The CAM IP can be configured by double-clicking the instantiated IP.
The CAM IP core in the Vivado Design Environment (IDE) has several fields used to set
parameter values for the particular instantiation required. The following section provides
descriptions for each field.
• Component Name: The name of the core component to be instantiated. The name must begin
with a letter and be composed of the following characters: a to z, A to Z, 0 to 9 and ‘_’.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 26Chapter 5: Design Flow Steps
Main Tab
• Lookup Mode: Options available in this pull-down menu are: BCAM, STCAM, and TCAM.
Depending on the option selected, the configuration parameters available will change.
• BCAM: Selects the Binary Content Addressable Memory. Figure 5: BCAM Configuration
Parameters shows the configuration parameters when BCAM is selected. BCAM is
described in this document.
• STCAM: Selects the Semi-Ternary Content Addressable Memory. Figure 6: STCAM
Configuration Parameters shows the configuration parameters when STCAM is selected.
Refer to Semi-Ternary CAM Search LogiCORE IP Product Guide (PG319).
• TCAM: Selects the Ternary Content Addressable Memory. Figure 7: TCAM Configuration
Parameters shows the configuration parameters when TCAM is selected. Refer to Ternary
CAM Search LogiCORE IP Product Guide (PG318).
Figure 5: BCAM Configuration Parameters
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 27Chapter 5: Design Flow Steps
Figure 6: STCAM Configuration Parameters
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 28Chapter 5: Design Flow Steps
Figure 7: TCAM Configuration Parameters
• MEMORY_PRIMITIVE: Options available in this pull-down menu are: AUTO, BLOCK, and
ULTRA.
• AUTO: The Vivado CAM compiler will select the best suited memory type, either being
block RAM or URAM, automatically. The respective block RAM/URAM resource usage is
shown in the "CAM Configuration Information" section of the GUI.
• BLOCK: User specifies the memory primitive to be block RAM. The block RAM resource
usage is shown in the CAM Configuration Information section of the GUI.
• ULTRA: User specifies the memory primitive to be URAM. The URAM resource usage is
shown in the CAM Configuration Information section of the GUI.
• NUM_ENTRIES: The supported number of entries (depth). The number of entries is limited by
the number of RAM instances used:
• RAM_FREQChapter 5: Design Flow Steps
• RAM_FREQ > 480 MHz: 320 BRAM or 160 URAM
Note: (BCAM only) NUM_ENTRIES represent number of usable entries. When targeting a certain
memory depth for a BCAM, specify 95% of the target. For example, to get a BCAM with memory of
depth 4K, specify NUM_ENTRIES = 0.95 x 4096 = 3891.
• NUM_MASKS: The number of unique masks. The Vivado CAM compiler generates a STCAM
supporting both the specified number of unique masks and the specified number of entries at
the same time.
Note: This parameter is only available for STCAM.
• KEY_WIDTH: The width of the lookup key.
Note: This parameter is only available for BCAM and STCAM.
• FORMAT_STRING:
Note: This parameter is only available for TCAM.
The format string describes the format of all keys and masks. A key consists of several fields
and the format string specifies the location and size of the fields. In the format string, fields
are separated by a colon ':'. The format string is read left to right. The first field corresponds to
the least significant bit of the key. The key is specified as little-endian. Each field is specified
with a field length and field type. There are no alignment restrictions for the fields. The
location, type, number, and size of fields is fully flexible. The following field types and lengths
are supported:
• b - bit field: The field mask is either all zeroes or all ones; field_len = 1..128 bit, complexity
=2
• t - ternary field: The field mask can have any value; field_len = 2..16 bit, complexity =
2^field_len
• c - constant bit field: The mask is all ones; field_len = 1..128 bit, complexity = 1
• u - unused bit field: The mask is all zeroes; field_len = 1..128 bit, complexity = 1
• p - prefix field: The mask has a pattern of consecutive zeroes and ones; field_len = 1..128
bit, complexity = field_len + 1
• r - range field: Matching is performed with logic comparators within start/end values
• RESPONSE_WIDTH: The width of the lookup response.
• DEFAULT_RESPONSE_VALUE: Specify the Default Response value when Lookup has no
match. Valid range is between 1 to 1024 bits specified in Hex. The value is set to zero by
default.
• TEST_FEATURE: This is a test feature and should be left at the default value of zero.
Note: This parameter is only available for BCAM.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 30Chapter 5: Design Flow Steps
• OPTIMIZATION: Options available in this pull-down menu are: AUTO, RAM, and LOGIC. The
logic usage is proportional to the number of Physical Memory Units. The RAM usage and
number of Memory Units are shown in the CAM Configuration Information section of the
GUI:
• AUTO: The Vivado CAM generator will balance the usage of logic and RAM resources.
• RAM: Use this option to reduce RAM usage at a potentially higher logic usage.
• LOGIC: Use this option to reduce logic usage at a potentially higher RAM usage.
• OPTIMIZE_ENTRIES: When this check box is selected, use the available memory to insert
entries beyond the specified NUM_ENTRIES limit. A side effect for STCAM is that the
specified NUM_MASKS value is no longer guaranteed but is ‘up to’ instead. Refer to the row
BRAM36/URAM Utilization in the Figure 8: CAM Configuration Information table for
resulting values based on this selection.
Note: This parameter is only available for BCAM and STCAM.
• OPTIMIZE_MASKS: When this check box is selected, use the available memory to insert more
masks than the specified NUM_MASKS limit. A side effect of this is that the specified
NUM_ENTRIES value is no longer guaranteed but ‘up to’ instead. Refer to the rows BRAM36/
URAM Utilization and Number of Masks in the Figure 8: CAM Configuration Information table
for resulting values based on this selection.
Note: This parameter is only available for STCAM.
• LOGICAL_MEM_UNITS: Force Number of Logical Memory Units, the value will be rounded up
to a multiple of the TDM_FACTOR. This is an Advanced Feature and it is recommended to use
the AUTO selection.
• AUTO: When this check box is selected, the Vivado CAM compiler automatically calculates
the appropriate value for LOGICAL_MEM_UNITS. You can override this by deselecting the
check box and specifying the appropriate value.
• PRIORITY_WIDTH:
Note: This parameter is only available for STCAM & TCAM
The priority is usually defined wide enough to support one unique priority value per entry.
The width can be larger to facilitate easier STCAM and TCAM management or narrower if
entries are order independent and guaranteed not to overlap.
• AUTO: When this check box is selected, the Vivado CAM compiler automatically calculates
the appropriate value for PRIORITY_WIDTH based on NUM_ENTRIES for TCAM, and
NUM_MASKS for STCAM. You can override this by deselecting this check box and
specifying the appropriate value.
For STCAM, the PRIORITY_WIDTH is calculated to accomodate NUM_MASKS different
priorities and for TCAM it is calculated to accomodate NUM_ENTRIES different priorities.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 31Chapter 5: Design Flow Steps
• LOOKUP_RATE: This is the supported lookup rate of the CAM instance (expressed in million
Lookups per second). In order to save resources it is important not to set the lookup rate
higher than required.
• CLOCKING_MODE: Options available in this pull-down menu are: SINGLE CLOCK and DUAL
CLOCK. When SINGLE CLOCK is selected the configuration parameter RAM_FREQ is not
available.
• LOOKUP_INTERFACE_FREQ: This is the clock frequency for the Lookup Request and
Response Interfaces, specified in MHz.
• RAM_FREQ: This is the clock frequency for the memories (block RAM/URAM) and the
internal datapath, specified in MHz. Specifying a higher frequency RAM clock enables time
division of the hardware resources, leading to significant resource savings. This configuration
parameter is only available when CLOCKING_MODE = DUAL CLOCK is selected.
Note: Note when CLOCKING_MODE = SINGLE CLOCK, RAM_FREQ = LOOKUP_INTERFACE_FREQ.
• CAM Configuration Information: This table provides interactive information based on the
configuration parameter values entered. It allows a quick way to converge on the required
CAM settings for the design needs. The information provided is shown in the following figure.
Figure 8: CAM Configuration Information
• Memory Depth: The depth of the resulting memory based on the value of configuration
parameter NUM_ENTRIES.
• Memory Width: The width of the resulting memory based on configuration parameter
values entered. The contributing composition of the individual components (which vary
depending on the Lookup Mode selected) to the width is also provided. For example, the
unused component (if not zero) indicates to the user that the other component sizes can be
increased with no additional memory resource penalty.
• BRAM36/URAM Utilization: The memory utilization efficiency.
• BRAM36 Usage: The number of resulting BRAM36s used to implement the required
memory size. A value of 0 indicates no BRAM36s are used.
• URAM Usage: The number of resulting URAMs used to implement the required memory
size. A value of 0 indicates no URAMs are used.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 32Chapter 5: Design Flow Steps
• Memory Units: Each Physical Memory Units requires logic resources. The number of
Physical Memory Units can be used to compare relative logic resource cost between
different configurations.
• Lookup Latency: The lookup latency value indicated in multiples of the
LOOKUP_INTERFACE_FREQ clock cycles.
• Lookup Interface Frequency: The LOOKUP_INTERFACE_FREQ frequency and the number
of lookups occurring per LOOKUP_INTERFACE_FREQ clock cycle.
• RAM Clock Frequency: The RAM_FREQ frequency (note when CLOCKING_MODE =
SINGLE CLOCK, RAM_FREQ = LOOKUP_INTERFACE_FREQ). And the way the memory
bandwidth is split between Lookup Requests and Management Requests.
• TDM Factor: The time division multiplexing of hardware resources. The value indicated
describes the number of memory accesses per Lookup Request. When the value is
indicated as “capped” then a lower RAM_FREQ can be chosen without additional memory
resource penalty.
• Number of Masks: Displays the number of masks used for STCAM only.
• Debug Flags: The debug flags can be enabled or disabled via selection of the tick-boxes as
shown in the following figure, thus enabling /disabling the respective debug functions. The
debug functions are controlled via the DEBUG_FLAGS parameter, a 32-bit integer, whose
value is also shown in grey specified as "Debug Flags Value". Details of what each debug
function does can be found in the Debugging section.
Figure 9: Debug Flags
Note: During HDL simulation the DEBUG_FLAGS values can be modified dynamically as required.
Related Information
Debugging
User Parameters
The following table shows the relationship between the fields in the Vivado IDE and the User
Parameters (which can be viewed in the Tcl Console).
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 33Chapter 5: Design Flow Steps
Table 11: Vivado IDE Parameter to User Parameter Relationship
Vivado IDE Parameter User Parameter Default Value
Lookup Mode MODE BCAM
MEMORY_PRIMITIVE MEM_TYPE AUTO
NUM_ENTRIES NUM_ENTRIES 256
NUM_MASKS NUM_MASKS 2
KEY_WIDTH KEY_WIDTH 104
FORMAT_STRING FORMAT_STRING 32p:32p:16r:16r:8b
RESPONSE_WIDTH RESP_WIDTH 16
PRIORITY_WIDTH PRIO_WIDTH 8
DEFAULT_RESPONSE_VALUE DEFAULT_RESPONSE 0x0000
AUTO PRIO_WIDTH_AUTO_SEL true
LOOKUP_RATE LOOKUP_RATE 15.0
CLOCKING_MODE CLOCKING_MODE DUAL CLOCK
LOOKUP_INTERFACE_FREQ LOOKUP_INTERFACE_FREQ 15.0
RAM_FREQ RAM_FREQ 480.0
OPTIMIZATION OPTIMIZATION AUTO
OPTIMIZATION_ENTRIES OPTIMIZATION_ENTRIES false
OPTIMIZATION_MASKS OPTIMIZATION_MASKS false
LOGICAL_MEM_UNITS L_MEM_UNITS 4
AUTO L_MEM_UNITS_AUTO_SEL true
Debug Flags DEBUG_FLAGS 262242
Output Generation
For details, see the Vivado Design Suite User Guide: Designing with IP (UG896).
Note: When the CAM IP is generated, a simulation SystemVerilog package file is also created with the
name _sim_pkg.sv. This file contains the SystemVerilog task create which
contains the configuration settings used for this particular CAM IP instance. You can use this simulation
package file and thus the SystemVerilog tasks in it in their own testbench if desired.
Constraining the Core
This section contains information about constraining the core in the Vivado Design Suite.
PG317 (v2.2) July 27, 2021 www.xilinx.com
Send Feedback
Binary CAM Search IP 34You can also read