Algebraic Parameter Identification of Nonlinear Vibrating Systems and Non Linearity Quantification Using the Hilbert Transformation
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Hindawi Mathematical Problems in Engineering Volume 2021, Article ID 5595453, 16 pages https://doi.org/10.1155/2021/5595453 Research Article Algebraic Parameter Identification of Nonlinear Vibrating Systems and Non Linearity Quantification Using the Hilbert Transformation Luis Gerardo Trujillo-Franco ,1 Gerardo Silva-Navarro ,2 and Francisco Beltran-Carbajal 3 1 Universidad Politecnica de Pachuca, Automotive Mechanical Engineering, Zempoala, Hidalgo, Mexico 2 Centro de Investigacion y de Estudios Avanzados del IPN, Departamento de Ingenieria Electrica, Seccion de Mecatronica, Mexico City, Mexico 3 Universidad Autónoma Metropolitana, Unidad Azcapotzalco, Departamento de Energı́a, Mexico City, Mexico Correspondence should be addressed to Francisco Beltran-Carbajal; fbeltran@azc.uam.mx Received 19 February 2021; Revised 2 June 2021; Accepted 14 June 2021; Published 23 June 2021 Academic Editor: Libor Pekař Copyright © 2021 Luis Gerardo Trujillo-Franco et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A novel algebraic scheme for parameters’ identification of a class of nonlinear vibrating mechanical systems is introduced. A nonlinearity index based on the Hilbert transformation is applied as an effective criterion to determine whether the system is dominantly linear or nonlinear for a specific operating condition. The online algebraic identification is then performed to compute parameters of mass and damping, as well as linear and nonlinear stiffness. The proposed algebraic parametric identification techniques are based on operational calculus of Mikusiński and differential algebra. In addition, we propose the combination of the introduced algebraic approach with signals approximation via orthogonal functions to get a suitable technique to be applied in embedded systems, as a digital signals’ processing routine based on matrix operations. A satisfactory dynamic performance of the proposed approach is proved and validated by experimental case studies to estimate significant parameters on the mechanical systems. The presented online identification approach can be extended to estimate parameters for a wide class of nonlinear oscillating electric systems that can be mathematically modelled by the Duffing equation. 1. Introduction domain method for the identification of this parameter is proposed in [6]. In the context of nonlinear systems, a black Accurate fast parameter identification of vibrating me- box system identification technique based on co-evolu- chanical systems constitutes an active research subject. tionary algorithms and neural networks is proposed in [7], Optimization algorithms, least squares, time series, statis- and this approach is applied to a magnetorheological tical methods, spectral analysis, Volterra series, wavelets, and damper. As a process, system parameters’ identification orthogonal functions have been used for development of involves a sequence of systematic stages. The final of those parametric identification techniques [1–3]. In [4], optimi- stages involves the application of special tools such as zation techniques, combined with classic control theory, specialized software that features several numerical methods have been introduced for system parameters’ identification, for processing and analyzing the signals obtained from and a special application for parameters’ identification for experimental tests applied to mechanical systems under the active vibration absorption schemes is reported in [5] where study. All of these efforts are conducted for achieving the the offline modal analysis are implemented in the presence final goal of building a mathematical model for the de- of noise. A model for linear nonviscous damping and a time- scription of the dynamic behavior of a specific vibrating

2 Mathematical Problems in Engineering mechanical system. Standard mathematical tools for iden- can take advantage of the orthogonal functions signal ap- tification purposes are methods used to analyze considerably proximation in order to make compact and easier to perform large amounts of experimental data. As a result of this iterated integrals [22, 23]. Analytical and experimental re- numerical analysis, the mathematical model of the system sults are described to prove the effectiveness of the proposed dynamics behavior is then built in terms of the determined algebraic scheme for online parameter estimation of the or identified parameters. Classical mathematical modelling nonlinear vibrating system. The proposed algebraic identi- of vibrating systems is commonly based on linear as- fication scheme can be directly extended to estimate pa- sumptions on their dynamical behavior. In this way, it is rameters for a wide class of nonlinear oscillating electric possible to use basic and well-behaved approaches such as systems that can be mathematically modelled by the Duffing least squares and autoregressive models [3, 8–10]. Never- equation [24]. The main contributions of the present work theless, in modern materials and structural engineering, are summarized as follows: large displacements, geometrical restrictions, and complex (i) An algebraic method for online and time-domain behavior are now becoming common in modern mechanical identification of parameters for an important class structures resulting on inherent nonlinear phenomena. of nonlinear vibrating systems is presented and Hence, despite of numerous advantages of linearity as- evaluated in several experimental case studies sumptions on mechanical systems, there are cases where linear methods are not longer effective or even valid (ii) The proposed algebraic estimation approach re- [3, 11, 12]. quires a small interval of time to provide accurate Nowadays, evident developments in computing sciences results and great capabilities of modern and multitasking micro- (iii) Compared to other parameter identification processors and microcontrollers [13–15] open the doors to methods, a significant reduction of the amount of the possibility of applying novel and sophisticated numerical data required for the estimation process is an im- methods, which allow to perform interesting and before portant highlight unacceptably, complicated online parameters’ identification (iv) The approximation of signals by means of or- schemes for adaptive control [16]. Thus, complex problems, thogonal polynomials, in combination with the such as nonlinearities in mechanical systems, as that re- algebraic approach, provides robustness and sim- ported in [17], can be addressed by using mathematical tools, plifies the computation of iterated integrations which in the past were purely theoretical and very hard to prove with experimental data, for the practical application of This paper is organized as follows. The class of nonlinear diverse nonlinear systems’ identification schemes as the ones vibrating mechanical system considered for algebraic and reported in [18–20], where the identification of the state online parameters estimation is described in Section 2. In equation in nonlinear systems is presented for two inter- addition, a nonlinearity detection method, based on the esting simulation cases. These approaches are based on Hilbert transformation, is presented. The experimental system signals’ approximation by determining an analytical verification of the proposed identification scheme is de- function g that approximates the actual (unknown) system scribed in Section 3, where the performance of the algebraic state equation g, with the form of g including suitable basis identification approach is evaluated in two case studies. The functions that are relevant to the specific problem. Certainly, nonlinearity detection method described in Section 2 is there are challenges and limitations in the use of micro- verified on both of the case studies. A combination of the controllers in the context of strict real-time applications, algebraic estimation technique with the signals approxi- given the inherent nature of their reduced instruction set mation using orthogonal polynomials is described in Section architecture, called RISC, mainly in quadratic programming 4. The resulting technique represents an alternative to im- applications for optimization. However, in the present work, plement estimations of system parameters using buffered the use of these advanced digital systems in an algebraic signals. Finally, main conclusions of the present study are identification scheme is proposed with satisfactory results. described in Section 5. In this work, we present an online algebraic identifi- cation method based on the important mathematical tools of 2. Nonlinear Vibrating System Mikusiński’s operational calculus, orthogonal functions’ signal approximation, and application of Hilbert transforms, 2.1. Mathematical Model of the Nonlinear Vibrating System. to compute the main physical parameters of a vibrating Consider the vibrating mechanical system shown in Fig- mechanical system, using measurements of its response ure 1. The inherent dynamic behavior of the vibrating under the action of exogenous forces. We use Hilbert mechanical system is determined by the parameters of mass transforms as an indicator of presence of nonlinearities, by mi and nonlinear coupling elements that produce the forces using the properties of this linear transformation as reported Fsi and Fdi [22, 24]. Those nonlinear functions of dis- in [8, 12]. On the contrary, we apply an algebraic approach to placements and velocities, xi and x_ i , describe the nonlinear transform a complex calculus problem into an algebraic stiffness and nonlinear damping effects, respectively, and are equation [21] in terms of the parameters to be identified; this defined as follows:where bi denotes viscous damping and fci equation has an iterated time integral structure, such that we stands for the Coulomb friction coefficient, and the
Mathematical Problems in Engineering 3
x1 (t) x2 (t) xn (t)
Fs1 Fs2 Fs3 Fsn
f1 (t) m1 f2 (t) m2 fn (t) mn
Fd1 Fd2 Fd3 Fdn
Figure 1: Schematic diagram of a general nonlinear mechanical system.
constants kij , j � 1, 2, . . . , r, with r a positive integer, rep- important and necessary to have an indicator of how im-
resent polynomial stiffness coefficients. The function sgn(x) _ portant or dominant are the nonlinear terms over the global
is defined by dynamic response of the mechanical system. In the next
2 section, we present the application of a mathematical
Fsi � ki1 xi − xi− 1 + ki2 xi − xi− 1 method for determining this influence in terms of a nu-
r
+ · · · + kir xi − xi− 1 merical indicator.
r
j
� kij xi − xi− 1 , (1)
j�1 2.2. Nonlinearity Detection. There exist numerous methods
for determining the influence of nonlinearities present in the
Fdi � bi x_ i − x_ i− 1 + fci sgn x_ i , system dynamics [12, 25, 26]. When assuming linear be-
i � 1, 2, . . . , n, x0 ≡ 0, havior on the system, it is possible to use basic approaches
such as least squares and autoregressive models for control
1, if x_ ≥ 0, purposes [3, 27]. Despite of the numerous advantages of the
_ �
sgn(x) . (2) linearity assumption on mechanical systems, there are cases
− 1, if x_ < 0 where the linear methods are ineffective or inoperative. It is
well known that the use of the Hilbert transform in the
analysis of nonlinear systems is a well-founded tool [8, 12].
For each degree of freedom associated with the position
The Hilbert transform pairs, as described in [8], of an specific
coordinate xi , the nonlinear system dynamics can be de-
frequency response function F(ω), also known as system
scribed by the set of coupled differential equations:
FRF, are defined as
€ i + Fsi + Fdi + bi+1 x_ i − x_ i+1
mi x
1 ∞ Im(F(ω))
r
j
Re(F(ω)) � − cp dω � H{Im(F(ω))},
− ki+1j xi+1 − xi � fi , i � 1, 2, . . . , n, xn+1 ≡ 0. π − ∞ ω − ωc
j�1 (6)
(3)
1 ∞ Re(F(ω))
Thus, we can express the dynamic behavior of the Im(F(ω)) � cp dω � − H{Re(F(ω))},
π − ∞ ω − ωc
nonlinear system shown in Figure 1 in the matrix form
(7)
Mx€ + Bx_ + Kx + Q(y, x)
_ � f(t), (4)
where H{} denotes the Hilbert transformation operator. The
where the vector x ∈ Rn denotes the physical displacements terms Re(F(ω)) and Im(F(ω)) denote the real and imag-
of the masses as a function of time t and the relative dis- inary part of the complex function F(ω), respectively. The
placements y � [(x2 − x1 ), (x3 − x2 ), . . . , (xn+1 − xn )]T , constant cp denotes the Cauchy principal value of the in-
n tegral, used by the singularity at ω � ωc into the integrand.
f ∈ R is an exogenous force vector, and the function
_ ∈ Rn is a nonlinear restoring force, commonly
Q(y, x) Relations defined by (6) and (7) are not valid for nonlinear
depending on the displacements and velocities of the n systems, and, as a consequence, the Hilbert transformation
degrees of freedom. The dynamic response of the linear part H{F(ω)} results in a distorted version of the original F(ω).
is determined for the mass, linear damping, and stiffness This distortion is then used as a nonlinearity indicator,
matrices: M ∈ Rn×n , B ∈ Rn×n , and K ∈ Rn×n . The nonlinear numerically quantifiable, that determines the level of non-
restoring force takes a structure such that linear behavior of the system under analysis. The cross
. . correlation coefficient is a numerical index used for this
Q(y, x) � K2 y2 + K3 y3 + · · · + Kr yr + Fc sgn(x), (5) purpose:
�� ��2
where Kj ∈ Rn×n with j � 2, 3, . . . , r are polynomic stiffness ηHi � ��XHF (0)�� , (8)
matrices and Fc ∈ Rn×n is the Coulomb friction matrix.
Equation (5) implies a piecewise operation such that where ‖XHF (0)‖ is the normalized cross correlation coef-
yr � [(x2 − x1 )r , (x3 − x2 )r , . . . , (xn+1 − xn )r ]T . Now, it is ficient defined by
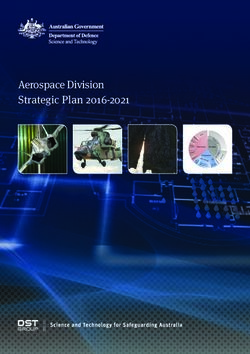
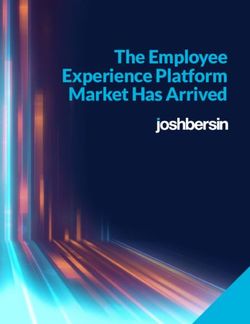
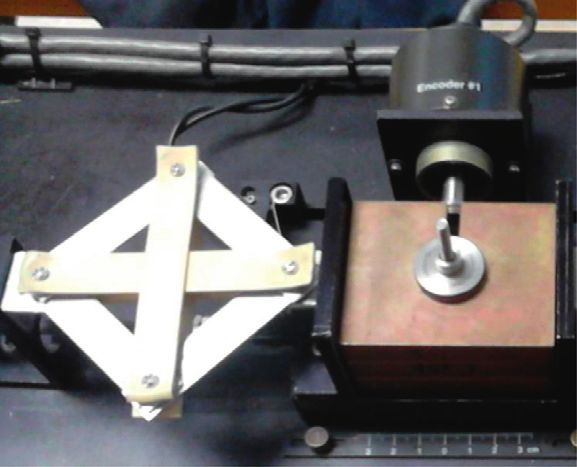
4 Mathematical Problems in Engineering ∞ XHF (Δω) � H(ω)F(ω + Δω)dω, (9) _ � kx + kp x3 . q(x, x) (11) −∞ where F(ω) is the FRF of the system and H(ω) the Hilbert 3.2. Frequency Response Function (FRF) and Nonlinearity transform of F(ω). The numerical value ηHi indicates Index Calculation. The frequency analysis of the nonlinear nonlinearity in the system at a specific input amplitude. In mechanical system shown in Figure 4 was conducted by this work, we use this index to study the presence of applying a harmonic sinusoidal swept f(t) � A sin[ω(t)t], nonlinearities in the system under analysis, where, for a with a constant amplitude of A � 2.96 N and a time-varying linear system, the expected value of ηHi is precisely 1. Here, frequency ω(t) � 1.25t Hz. The time-domain chart and the we consider a particular linearity criterion, as reported in [8]. corresponding system response to the sinusoidal swept is Thus, we can consider a value of 0.9 ≤ η ≤ 1 for a linearity shown in Figure 5. assumption of the system. Values under 1 are considered as a The corresponding FRF is reported in Figure 4 where it is clear indicative of nonlinear behavior of the system. possible to observe a clear distortion on the Hilbert trans- form of the original FRF (on blue) at this particular am- Remark 1. There are significant advances and improve- plitude of the input force, which is evident in the Argand ments on the application of the Hilbert Transformation for (Real, Imag) chart, as depicted in Figure 4. the time-domain identification of the instantaneous fre- In order to evaluate the effects of the amplitude on the quency and damping ratios [8, 18]. Those developments and distortion produced by the Hilbert transformation over the tools suggest the use of them for the implementation of original FRF, a set of sinusoidal sweeps, similar with the linear and nonlinear systems’ parameter estimation. How- same frequency range and several different amplitudes were ever, we consider important to make clear to the reader that performed to the system. The effect of the amplitude on the we are not using the Hilbert transformation-based methods nonlinearity index calculated according to equation (8) is to identify systems’ parameters. We use the Hilbert trans- reported in Figure 6. It is clear that the nonlinear effects are formation pairs (7) as a mathematical tool for the quanti- specially evident at amplitudes bigger than 2 N. fication of the nonlinear behavior of the system by analyzing In previous works, time-domain system parameters’ its FRF. identification has been proposed and verified in experiments and numerical simulations [28, 29], which involves the use of operational calculus for the algebraic manipulation of 3. Experimental Verification differential equations (see [21]). The proposed identification 3.1. First Case Study: One-Degree-of-Freedom Nonlinear Vi- scheme is robust and effective for both linear and nonlinear brating System. The experimental setup shown in Figure 2 is systems. In addition, the system parameters are estimated in a configuration for a nonlinear vibrating system of one a time-domain and online fashion by using measurements of degree of freedom, where its corresponding schematic di- the system input and output. In this work, we present ex- agram is also depicted. The mechanical system consists of a perimental results of the evaluation of the algebraic ap- mass carriage, attached to a nonlinear spring. The mass proach on a particular experimental setup with geometric carriage has an antifriction ball bearing system, the mass nonlinearities. For synthesis of online and time-domain carriage has a (rotary) high-resolution optical encoder to parameter estimators, equation (10) is multiplied by (Δt)2 � measure its actual position via cable-pulley system, where (t − t0 )2 and then integrated by parts with respect to time the effective resolution is 2266 pulses/cm. yielding: The nonlinear spring shown in detail in Figure 3 presents (2) a polynomial restoring behavior F(δ) � kp δ3 + kδ, which is m 2 x − 4 (Δt)x +(Δt)2 x t0 t0 described by the experimental data chart, also shown in (2) Figure 3. The numeric values of kp and k were determined by + b − 2 (Δt)x + (Δt)2 x applying a least squares curve fitting method to the ex- t0 t0 perimental data, where their corresponding magnitudes are (2) (2) (2) reported in Table 1. + k (Δt)2 x + kp (Δt)2 x3 � (Δt)2 f(t), The degree of freedom under analysis consists of one t0 t0 t0 mass carriage connected to a fixed support by the nonlinear (12) rubber elastic element described before. The mass carriage (n) where 0 ϕ(t) is used to denote iterated time integrals of suspension has antifriction ball bearing systems such that we the form: can neglect the dry friction. The mass carriage has a (rotary) t α1 αn− 1 high-resolution optical encoder to measure its actual posi- ... ϕ αn dαn . . . dα1 . (13) tion x(t) via a cable-pulley system. The nonlinear differential t0 t0 t0 equation that describes this dynamical system is given by Notice that this expression does not depend on the mx€ + bx_ + q(x, x) _ � f(t), (10) system initial conditions of any involved function. Here, we have an expression for the system parameters m, b, k, and kp . with Notice that the system parameters appear algebraically in
Mathematical Problems in Engineering 5 x (t) Rotary Nonlinear encoder Fs spring f (t) m Mass carriage b (a) (b) Figure 2: One degree-of-freedom nonlinear vibrating mechanical system and its corresponding schematic representation. 20 F (δ) (N) 0 Nonlinear spring –20 –0.02 –0.01 0 0.01 0.02 δ (m) Experimental data Estimated curve (a) (b) Figure 3: Nonlinear spring and its corresponding curve of force. Table 1: System parameters. b, k, where θ � [m, k ] is the vector of the estimated pa- p rameters, A and D are, respectively, 4 × 4 and 4 × 1 matrices Parameters Value given by m 2.53 kg b 0 Ns/m a11 a12 . . . a14 ⎡⎢⎢⎢ ⎤⎥⎥ k 1272.1 N/m ⎢⎢⎢ a21 a22 . . . a24 ⎥⎥⎥⎥ kp –1.237 × 106 N/m3 A � ⎢⎢⎢⎢⎢ ⎥⎥⎥, ⎥⎥⎥ ⎢⎢⎢ ⋮ ⋮ ⋮ ⎥⎦ ⎣ a41 a42 . . . a44 (15) equation (12). The identification of the system parameters is d1 ⎡⎢⎢⎢ ⎤⎥⎥⎥ achieved by the algebraic manipulation of equation (12) in ⎢⎢⎢ d ⎥⎥ 2⎥ order to express those parameters by a system of linear D � ⎢⎢⎢⎢⎢ ⎥⎥⎥⎥⎥. ⎢⎢⎢ ⋮ ⎥⎥⎥ equations, whose solution is precisely the set of unknown ⎣ ⎦ terms [21, 29]. Hence, d4 Aθ � D, (14) The components ai,j and di are
6 Mathematical Problems in Engineering
×10–4
0.02 0
|X (ω)| (m)
Image
–2
0.01
–4
0
0 5 10 15 20 –3 –2 –1 0 1 2 ×10–4
ω (Hz) Real
Original FRF
HT {FRF}
(a) (b)
Figure 4: FRF of the system and its Hilbert transformation.
0.04
2 x (t) (m) 0.02
f (t) (m)
0 0
–2 –0.02
–0.04
0 20 40 60 80 0 20 40 60 80
t (s) t (s)
(a) (b)
Figure 5: System response under sinusoidal swept excitation.
1 ×10–3
1
0.8
Real
0
ηHi
0.6 1
–1
6 0
4
0.4 2 ge ×10–3
F (N) 0 –1 Ima
0 1 2 3 4 5 6
F (N)
Original FRF
HT {FRF}
(a) (b)
Figure 6: Effect of the amplitude on the nonlinearity index.Mathematical Problems in Engineering 7 (2) of time (less than 200 ms). For the case of the estimation of a11 � 2 x − 4 (Δt)x +(Δt)2 x, the viscous damping, there is no reference for comparison t0 t0 due to the ineffectiveness of the traditional identification (2) a12 � − 2 (Δt)x + (Δt)2 x, methods when are applied to this particular system. t0 t0 The comparison and results are summarized in Table 2. (2) The estimations are practically similar to the actual a13 � (Δt)2 x, (16) values. The average values of the real-time estimated pa- t0 rameters are m � 2.55 kg, k � 1290.34 N/m, and (2) k p � − 123.7 × 104 N/m3 , which are good approximations to a14 � (Δt)2 x3 , the actual values in spite of inherent unmodelled dynamics t0 (2) and noisy measurements. d1 � (Δt)2 f. t0 3.3. Second Case Study: Two Degrees-of-Freedom Nonlinear The iterated integrations of equation (16) lead to the rest Vibrating System. A two-degrees-of-freedom configuration of the entries or components of the matrices A and D as is now shown in Figure 9, where the nonlinear springs have a follows: similar behavior to the one degree of freedom configuration. akj � ak− 1j , The actual system parameters are reported in Table 3. t0 Similarly, small viscous damping was neglected. For the (17) evaluation of the nonlinearity index, based on the Hilbert dk � dk− 1 , transformation, we analyze the system response to the si- t0 nusoidal swept, where the amplitude F is varied in the with k � 2, . . . , 4 and j � 1, . . . , 4. Hence, closed-time interval [0.1, 6.15] N, with 13 different mea- surements. In Figure 10, four measurements of the FRF and Δ1 ⎢ ⎡ ⎤⎥⎥⎥ their corresponding Hilbert transformations in the Argand ⎢ ⎢ ⎢ 1⎢ ⎥⎥⎥ diagram are reported. θ � (A)− 1 D � ⎢ ⎢ ⎢ ⋮ ⎥⎥⎥. (18) Δ⎢ ⎣ ⎥⎥⎦ ⎢ ⎢ On the contrary, the nonlinearity index as a function of the input force amplitude is described in Figure 11. It can be Δ4 confirmed that this system certainly exhibits high nonlin- Then, the estimations of the system parameters m, b, k, earities as far as the force input is increased. The corre- and kp contained as components of the vector θ can be sponding Nyquist diagrams are shown in the right part of algebraically computed in some short window of time and Figure 11. Here, we can observe a clear distortion on the without singularities by the estimators: Hilbert transforms for the original FRF (in blue), which is evident when the amplitude of the excitation force achieves a (2) t e− c(t− t0 ) Δi level of approximately 3 N. � sgn Δ sgn(Δ) θ[i] 0 , i � 1, . . . , 4, We also compute the nonlinearity index based on the i (2) t e− c(t− t0 ) |Δ| Hilbert transform as defined in (8) and (9). 0 (19) For the case of two degrees of freedom, we can apply the online algebraic identification approach as in the case of the where c ≥ 0 is an invariant filtering and smoothing gain, as single-degree-of-freedom system with some adaptations that used in [29, 30]. Here, · denotes estimate and “sgn” is a are reported in [29]. First, we can describe the system dy- function defined in 2 which is only used to get the sign of the namics by the set of coupled differential equations, when the nonlinear stiffness parameter kp . force applied to the second mass carriage or degree of For the experimental verification of the algebraic freedom is zero (f2 (t) ≡ 0), identification scheme, we use a step excitation force with an amplitude of 14 N and take measurements of the position of m1 x1 + b1 x_ 1 + k1 x1 + kp1 x31 + b2 x_ 1 − x_ 2 the mass carriage at a constant sampling period of 1 ms; (20) both, the position signal x(t) and algebraic identification are 3 + k2 x1 − x2 − kp2 x2 − x1 � f1 , obtained through a high-speed DSP board into a standard PC running under Windows 10 and Matlab /Simulink . ® The parameters of the mechanical system are reported in ® ® b2 k x_ 2 − x_ 1 + 2 x2 − x1 + kp2 3 x − x1 � − x€2 . (21) Table 1. The excitation force f(t) and the system response m2 m2 m2 2 x(t) are shown in Figure 7. Online estimations of the parameters m, b, k, and k are p For the construction of the online and time-domain shown in Figure 8. Notice that, the effective estimation of the estimators, equations (20) and (21) are first multiplied by system parameters is achieved in a considerably short period (Δt)2 � (t − t0 )2 and then integrated by parts twice yielding
8 Mathematical Problems in Engineering 0.03 20 0.02 f (t) (N) x (t) (m) 14 0.01 0 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) (a) (b) Figure 7: System response under step-type excitation: input force and transient response. 4 15 bˆ (Ns/m) ˆ (kg) 2 10 m 5 0 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) Estimated Estimated Actual Actual (a) (b) 5 ×10 2000 0 –5 kˆp (N/m3) kˆ (N/m) 1000 –10 –15 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) Estimated Estimated Actual Actual (c) (d) Figure 8: Online system parameters’ identification. (2) (2) (2) m1 2 x1 − 4 (Δt)x1 +(Δt)2 x1 + b1 − 2 (Δt)x1 + (Δt)2 x1 + k1 (Δt)2 x1 t0 t0 t0 t0 t0 (2) (2) (2) + kp1 (Δt)2 x31 + b2 − 2 (Δt) x1 − x2 + (Δt)2 x1 − x2 + k2 (Δt)2 x1 − x2 (22) t0 t0 t0 t0 (2) (2) 3 − kp2 (Δt)2 x2 − x1 � (Δt)2 f1 (t), t0 t0 b2 (2) k (2) 2 2 − 2 (Δt) x2 − x1 + (Δt) x2 − x1 + 2 (Δt) x2 − x1 m2 t0 t0 m2 t0 (23) kp2 (2) 3 (2) + (Δt)2 x2 − x1 � − 2 x2 + 4 (Δt)x2 − (Δt)2 x2 , m2 t0 t0 t0
Mathematical Problems in Engineering 9
Table 2: Parameters’ estimation summary.
Parameter Actual Estimated Difference (%)
m kg 2.53 2.55 0.79
b Ns/m — 12.47 —
k N/m 1272.1 1290.34 1.43
kp Nm− 3 − 123.7 × 104 − 114.83 × 104 7.72
Rotary x1 (t) x2 (t)
encoders Fs1 Fs2
Fs1 (x1) Fs2 (x1,x2)
f1 (t) m1 f2 (t) m2
Mass carriages
b1 b2
2 DoF non-linear experimental plant
(a) (b)
Figure 9: Two DOF vibrating mechanical system and its corresponding schematic representation.
Table 3: System parameters’ 2DOF configuration.
Parameter First DOF Second DOF
m 2.35 kg 2.754 kg
b — —
k 1272.1 Nm− 1 1570 Nm− 1
kp − 1.237 × 106 Nm− 3 − 1.350 × 106 Nm− 3
0.01
|X (ω)| (m)
0.005
0
2
60
1 40
F (N) 20
0 0 ω (Hz)
Figure 10: Two-degrees-of-freedom case, system FRF at different excitation amplitudes.
1
×10–4
5
0.8
ηHi
0
Real
0.6
5
–5
0
0.4
1
0.8 age
0 1 2 3 4 5 6 0.6 –5 Im ×10–4
ηHi
F (N)
Original FRF
HT {FRF}
(a) (b)
Figure 11: Nonlinearity index based on Hilbert transformation and Hilbert transformation of FRF distortion.10 Mathematical Problems in Engineering (n) where 0 ϕ(t) are iterated integrals such that: (2) t α α a1(11) � 2 x1 − 4 (Δt)x1 +(Δt)2 x1 , t t 1 . . . t n− 1 ϕ(αn )dαn . . . dα1 , in the same way as the case t0 t0 0 0 0 of one degree of freedom. Here, we have expressions for the (2) system parameters m1 , b1 , b2 , k1 , k2 , kp1 , and kp2 ; these a1(12) � − 2 (Δt)x1 + (Δt)2 x1 , t0 t0 system parameters appear algebraically in equation (22). The (2) identification of the system parameters for the case of two a1(13) � (Δt)2 x1 , degrees of freedom is done by solving the algebraic equation t0 (14) for each degree of freedom x1 and x2 . Hence, the two (2) independent algebraic equations for the system parameter a1(14) � (Δt)2 x31 , t0 identification are (27) (2) 2 A1 θ 1 � D 1 , (24) a1(15) � − 2 (Δt) x1 − x2 + (Δt) x1 − x2 , t0 t0 (2) A2 θ2 � D2 , (25) a1(16) � (Δt)2 x1 − x2 , t0 where θ1 � [m 1 , b1 , k 1 , k p1 , b2 , k 2 , k p2 ] is the vector of the (2) estimated parameters for the first degree of freedom x1 and a1(17) � (Δt)2 x2 − x1 , 3 θ2 � [b 2 /m2 , k2 /m2 , kp2 /m2 ] corresponds to the second de- t0 (2) gree of freedom x2 . Notice that, we cannot obtain the value d1(1) � (Δt)2 f1 . of m2 directly because of the zero force applied to the second t0 degree of freedom; however, the value of the parameter m2 is easily obtained by using the estimations of some of the two The iterated integrations of equation (27) lead to the rest parameters calculated with equation (25). The matrices A1 , of the entries or components of the matrices A1 and D1 as D1 , A2 , and D2 are, respectively, 7 × 7, 7 × 1, 3 × 3, and 3 × 1, follows: given by a1(11) a1(12) . . . a1(17) a1(kj) � a1(k− 1j) , ⎡⎢⎢⎢ ⎤⎥⎥ t0 ⎢⎢⎢ a ⎢ 1(21) a1(22) . . . a1(27) ⎥⎥⎥⎥⎥ (28) A1 � ⎢⎢⎢⎢ ⎥⎥⎥, d1(k) � d1(k− 1) , ⎢⎢⎢ ⋮ ⋮ ⋮ ⎥⎥⎥ ⎣⎢ ⎥⎦⎥ t0 a1(71) a1(72) . . . a1(77) with k � 2, . . . , 7 and j � 1, . . . , 7. Likewise, the components d1(1) a2(ij) and d2(i) for the matrix A2 are ⎡⎢⎢⎢ ⎤⎥ ⎢⎢⎢ d ⎥⎥⎥⎥ ⎢⎢ 1(2) ⎥⎥⎥ (2) D1 � ⎢⎢⎢ ⎥, ⎢⎢⎢ ⋮ ⎥⎥⎥⎥⎥ a2(11) � − 2 (Δt) x2 − x1 + (Δt)2 x2 − x1 , ⎣ ⎦ (26) t0 t0 d1(7) (2) a2(12) � (Δt)2 x2 − x1 , a2(11) a2(12) a2(13) t0 ⎡⎢⎢⎢ ⎤⎥⎥⎥ (29) A2 � ⎢⎢⎢⎣ a2(21) a2(22) a2(23) ⎥⎥⎥⎥⎦, (2) 2 3 a2(13) � (Δt) x2 − x1 , a2(31) a2(32) a2(33) t0 (2) d2(1) d2(1) � − 2 x2 + 4 (Δt)x2 − (Δt)2 x2 . ⎡⎢⎢⎢ ⎤⎥⎥ D2 � ⎢⎢⎢⎣ d2(2) ⎥⎥⎥⎥⎦. ⎢ t0 t0 d2(3) The iterated integrations of equation (29) lead to the rest of the entries or components of the matrices A2 and D2 as The components a1(ij) and d1(i) for the matrix A1 are follows:
Mathematical Problems in Engineering 11 The excitation force f1 (t) and the system responses, a2(kj) � a2(k− 1j) , x1 (t) and x2 (t), are shown in Figure 14. t0 (30) The results are summarized in Table 4. d2(k) � d2(k− 1) , t0 4. Combination of Two with k � 2, 3 and j � 1, 2, 3. Hence, we have two indepen- Identification Techniques dent algebraic expressions for the identification of the two- degrees-of-freedom nonlinear mechanical system: The proposed online algebraic system parameters’ identifi- Δ1(1) cation scheme is suitable to be implemented in complex ⎢ ⎡ ⎢ ⎢ ⎥⎥⎥⎤ digital systems based on microprocessors with x86 archi- 1 ⎢⎢ ⎢ ⎥⎥ θ1 � A1 D1 � ⎢ − 1 ⎢ ⎢ ⎢ ⋮ ⎥⎥⎥⎥⎥, tecture, such as desktop personal computers and portable Δ1 ⎢ ⎢ ⎢ ⎣ ⎥⎥⎦ computers (laptops) running hard or soft real-time oper- Δ1(7) ating systems as verified, shown and proven in the previous (31) sections of this work. Nowadays, it is common to use em- Δ2(1) bedded digital systems that contain a digital signal pro- ⎢ ⎡ ⎢ ⎤⎥⎥⎥ cessors working in conjunction with native peripherals such 1 ⎢⎢ ⎢ ⎥⎥ − 1 θ2 � A2 D2 � ⎢ ⎢ ⎢ ⎢ ⎢ Δ2(2) ⎥⎥⎥⎥⎥. as analogue-to-digital converters (ADC modules) and direct ⎢ Δ2 ⎢ ⎢ ⎥⎥⎥ memory access (DMA) for the complete implementation of ⎣ ⎦ Δ2(3) the digital system, see [13]. In this section, we propose a combination of two Then, the estimations of the system parameters m 2 , b1 , methods for the algebraic identification of the parameters of b , k , k , k , and k contained as components of the the nonlinear system studied in this work. We propose the 2 1 2 p1 p2 vectors θ1 and θ2 can be algebraically computed into some use of the orthogonal functions’ signal approximation for short window of time and without singularities by the the calculation of the iterated integrals involved in the online estimators: algebraic identification approach. On the contrary , by combining the technique reported in [22] and the proposed (2) t e− c(t− t0 ) Δ1(i) algebraic scheme [29], we have a contribution to the θ 1 [i] � sgn Δ1(i) sgn Δ1 (2) 0 , i � 1, . . . , 7, implementation of a system parameters’ identification t e− c(t− t0 ) |Δ| 0 technique designed to be applied on embedded digital (32) systems, completely based on matrix operations compatible with DSP libraries available in 32 bits ARM micro- (2) t e− c(t− t0 ) Δ2(i) controllers, see [14, 15]. The flowchart of the process of θ 2 [i] � sgn Δ2(i) sgn Δ2 0 (2) , i � 1, 2, 3, system parameters’ identification, for embedded systems, is t e− c(t− t0 ) |Δ| depicted in Figure 15. 0 A set of functions are called orthogonal [22] in the (33) interval [a, b] if they satisfy where c ≥ 0 is an invariant filtering and smoothing gain. b Here, · denotes estimate and “sgn” is the function defined in ϕm (t)ϕk (t) � 0, if m ≠ k, a equation (2) which is only used to get the sign of the (34) nonlinear stiffness parameters k p1 and k p2 . b ϕm (t)ϕk (t) � constant ≠ 0, if m � k. For experimental verification of the algebraic identi- a fication scheme, we use a step excitation force, applied to the first degree of freedom x1 with an amplitude of 14 [N] It is well known that, in a certain interval, it is possible to and take measurements of the position of the two mass approximate a given function by a finite sum of orthogonal carriages x1 and x2 at a constant sampling period of 1 functions. Consider the matrix form of the coupled equa- [ms]; both, the position signals x1 (t) and x2 (t) and the tions (20) and (21) that describe the dynamics of the algebraic identification schemes (32) and (33) are ob- nonlinear mechanical systems shown in Figure 9: .. . tained through a high-speed DSP board into a standard Mx + Bx + Kx + Kp y3 � f, (35) PC running under Windows 10 and Matlab /Simulink . ® The parameters of the mechanical system are reported in ® ® were M ∈ R2×2 , B ∈ R2×2 , and K ∈ R2×2 are the mass, Table 1. damping, and stiffness matrices, Kp ∈ R2×2 is the nonlinear The performance of the algebraic identifiers (32) is stiffness matrix, the vector x ∈ R2 denotes the physical shown in Figures 12 and 13 . Notice that it takes less than a displacements of the mass carriages, and the vector y ∈ R2 is half of a second to have stable and accurate estimations of defined as y � [(x2 − x1 ), − x2 ]T , with the vector the system parameters. For the case of estimator (33), the fast y3 � [(x2 − x1 )3 , − x32 ]T . Finally, the exogenous force is and accurate estimations of the normalized (respect to m2 ) represented in this particular experimental plant by the parameters are depicted in Figure 13. vector f ∈ R2 that, in this particular case, is f � f(t) 0
12 Mathematical Problems in Engineering 3 15 bˆ1 (Ns/m) ˆ 1 (kg) 2 10 m 1 5 0 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) Estimated Estimated Actual Actual (a) (b) ×109 1 1500 kˆ1p (N/m3) 0 kˆ1 (N/m) 1000 –1 500 0 –2 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) Estimated Estimated Actual Actual (c) (d) 15 2000 bˆ2 (Ns/m) kˆ2 (N/m) 10 1000 5 0 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) Estimated Estimated Actual Actual (e) (f ) ×106 0 6 bˆ2/ m2 (Ns/kgm) –2 kˆ2p (N/m3) 4 –4 –6 2 –8 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) Estimated Estimated Actual Actual (g) (h) Figure 12: Online system parameters’ identification 2DOF case.
Mathematical Problems in Engineering 13 ×105 1500 0 kˆ2p /m2 (N/kgm3) kˆ 2 /m2 (N/kgm) 1000 –2 –4 500 –6 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) Estimated Estimated Actual Actual (a) (b) Figure 13: Online system parameters’ identification 2DOF case, second degree of freedom. 30 0.04 20 x (m) f (N) 0.02 10 0 0 0 0.5 1 1.5 2 0 0.5 1 1.5 2 t (s) t (s) f1 x1 (t) f2 x2 (t) (a) (b) Figure 14: Two-degrees-of-freedom case. Table 4: System parameters’ estimation for the 2DOF configuration. Parameters Actual Estimated Difference (%) m1 2.53 kg 2.56 kg 1.19 b1 — 12.48 Nsm− 1 — k1 1272.1 Nm− 1 1280.7 Nm− 1 0.6 kp1 − 123.7 × 104 Nm− 3 − 1304.7 × 104 Nm− 3 5.4 m2 2.754 kg 2.80 kg 1.6 b2 — 11.67 Ns− 1 — k2 1570 Nm− 1 1585 Nm− 1 0.9 kp2 − 135.0 × 104 Nm− 3 − 144.8 × 104 Nm− 3 7.2 Interrupts driven data Direct memory access (DMA) acquisition peripheral used for fast creation of data buffer (encoder reader module, ADC, SPI, 12C) Orthogonal function’s signal approximation applied to the Fixed time-step buffered data measurements Application of matrix operations to the resulting approximations Parameter’s Linera/nonlinear identification vibrating system ˆ B, M, ˆ K, ˆ Kˆ , Cˆ p d Figure 15: Flowchart of the combination of techniques as a buffered parameters’ identification scheme.
14 Mathematical Problems in Engineering Table 5: System parameters’ estimation, using orthogonal func- representation by a sum of r orthogonal functions, is then tions’ signal approximation. given by Term Estimated Δtp x � Xp,(1,r) ϕ(t)(1,r) , M 2.57 0 Δt2 f � F(1,r) ϕ(t)(1,r) , (39) 0 2.75 Δt2 y3 � Y3,(1,r) ϕ(t)(1,r) , B 24.19 − 11.82 − 4.64 4.72 where p � 0, 1, 2. Here, X, Y3 , and F are constant vectors K 2848.7 − 1575.2 with the coefficients of the orthogonal functions approxi- − 571.96 − 576.4 mation of the integrands. Kp − 1.23 1.355 As reported in [22, 23], the orthogonal functions’ signal 1 × 106 approximation is useful in the solution of integral equations due 0 − 0.51 to the property which allows to compute the iterated numerical integration as defined by the following matrix expression: because the second degree of freedom is not actuated as (n) described before. By dividing the second row of equation ϕ(τ)dτ n � Pn ϕ(t), (40) (36) by m2 , one obtains t0 .. . Mx + Bx + Kx + Kp y3 � f, (36) where P ∈ Rr×r is the so-called operational matrix of inte- gration with constant elements, whose values depend on the where orthogonal basis used. ϕ(t) ∈ Rr is a vector called the m1 0 vectorial basis of the orthogonal series. In [23], a unified ⎢ M �⎡ ⎢ ⎣ ⎤⎥⎥⎦, method for the operational matrix of integration computing 0 1 is reported for the most popular orthogonal functions basis for signal approximation, and therefore, we can compute b1 + b2 − b2 numerically the iterated integral using this property. The ⎢ ⎡ ⎢ ⎢ ⎤⎥⎥⎥ substitution of equations (39) in (38) yields to ⎢ ⎥⎥⎥ B �⎢ ⎢ ⎢ ⎢ ⎥, ⎢ ⎣ b2 b2 ⎥⎥⎦ M 2X0 ϕ(t)P2 − 4X1 ϕ(t)P + X2 ϕ(t) − m2 m2 + B − 2X1 ϕ(t)P2 + X2 ϕ(t)P (41) k1 + k 2 − k 2 2 + KX2 ϕ(t)P + Kp Y3 ϕ(t)P � Fϕ(t)P . 2 2 ⎢ ⎡ ⎢ ⎢ ⎤⎥⎥⎥ ⎢ ⎥⎥⎥ K �⎢ ⎢ ⎢ ⎢ ⎢ ⎥⎥⎥, (37) Since we use a given orthogonal basis ϕ(t), we can equate ⎢ ⎣ − k 2 k 2 ⎥ ⎦ m2 m2 this coefficients so that using equations (39) and (40), we obtain the following matrix equation: kp1 − kp2 2X0 P2 − 4X1 P + X2 ⎢ ⎡ ⎢ ⎢ ⎤⎥⎥⎥ ⎡⎢⎢⎢ ⎤⎥⎥⎥ ⎢ ⎢ ⎥⎥⎥ ⎢⎢⎢ ⎥⎥⎥ Kp � ⎢ ⎢ ⎢ ⎥⎥⎥, ⎢ − 2X1 P2 + X2 P ⎥⎥⎥ ⎢ ⎢ ⎢ ⎣ kp2 ⎥⎥⎦ M B K Kp ⎢⎢⎢⎢ 2 ⎥⎥⎥ � FP . (42) 0 ⎢⎢⎢ X2 P2 ⎥⎥⎥ m2 ⎣⎢ ⎦ Y3 P2 f(t) ⎢ f �⎡ ⎢ ⎣ ⎤⎥⎥⎦. Now, let us define − x€2 [Θ]T � M B K Kp , Similarly, for the construction of the identifiers, by 2X0 P2 − 4X1 P + X2 multiplying equation (37) by (Δt)2 � (t − t0 )2 and inte- ⎡⎢⎢⎢ ⎤⎥⎥⎥ ⎢⎢⎢ − 2X1 P2 + X2 P ⎥⎥⎥ ⎢ ⎥⎥⎥ grating it by parts two times, we have [A] � ⎢⎢⎢⎢ ⎥⎥⎥, (43) ⎢⎢⎢ X2 P2 ⎥⎥⎥ ⎣⎢ ⎦ (2) M 2 x − 4 (Δt)x +(Δt)2 x Y3 P2 t0 t0 (2) [B] � FP2 . 2 + B − 2 (Δt)x + (Δt) x (38) t0 t0 Thus, in a compact way, we can write (2) (2) (2) T Θ A � B . (44) + K (Δt)2 x + Kp (Δt)2 y3 � (Δt)2 f. t0 t0 t0 This last expression constitutes the algebraic problem The orthogonal functions approximation of the inte- from identification, solved by using singular value decom- grands of equation (38), in the corresponding matrix position, which allows to introduce the concept of
Mathematical Problems in Engineering 15 pseudoinverse matrix, in order to solve the algebraic References problem for the vector [Θ] as follows: [1] T. Söderström and P. Stoica, System Identification, Prentice- T T − 1 Hall, Hoboken, NJ, USA, 1989. Θ � B A A A . (45) [2] L. Ljung, System Identification: Theory for the User, Prentice- Hall, Hoboken, NJ, USA, 1987. The results of the parameters’ estimation when the ex- [3] R. Isermann and M. Munchhof, Identification of Dynamic T citation force is f � 14 0 [N] are reported in Table 5. Systems: An Introduction with Applications, Springer-Verlag, Berlin, Germany, 2011. [4] R. Manikantan, S. Chakraborty, T. K. Uchida, and 5. Conclusions C. P. Vyasarayani, “Parameter identification in nonlinear mechanical systems with noisy partial state measurement In the present contribution, a time-domain algebraic scheme using pid-controller penalty functions,” Mathematics, vol. 8, for online parameter estimation for an important class of pp. 1281–1292, 2020. nonlinear vibrating mechanical systems was introduced. [5] Y. Yi, S. Xing, and H. Yun, “Multidimensional system Experimental results to prove the effectiveness of the pa- identification and active vibration control of a piezoelectric rameter estimation using real-time position measurements based sting system used in wind tunnel,” Shock and Vibration, were described. The satisfactory online fast estimation of the vol. 2020, Article ID 8856084, 15 pages, 2020. system parameters, performed in less than a second, was [6] R. Shen, X. Qian, and J. Zhou, “Identification of linear non- confirmed as well. Hence, results reveal that the algebraic viscous damping with different kernel functions in the time nonlinear parametric estimation constitutes an excellent domain,” Journal of Sound and Vibration, vol. 487, Article ID alternative with a superior performance to conventional 115623, 2020. identification techniques. Experimental system configura- [7] H. V. H. Ayala, D. Habineza, M. Rakotondrabe, and L. dos Santos Coelho, “Nonlinear black-box system identification tions involving nonlinear stiffness modelled such as alge- through coevolutionary algorithms and radial basis function braic polynomials were presented. The nonlinearity artificial neural networks,” Applied Soft Computing, vol. 87, exhibited in experimental configurations was of the geo- Article ID 105990, 2020. metric type. The algebraic approach can be extended to other [8] M. Feldman, Hilbert Transform Applications in Mechanical type of nonlinearities, such as Coulomb friction, as long as Vibration, John Wiley & Sons, Chichester, UK, 2011. they appear in an algebraic form in the system structure. [9] M. Feldman, “Non-linear system vibration analysis using Moreover, two different identification methods, taking ad- Hilbert transform--I. Free vibration analysis method “Free- vantage of particular capabilities in both of them, were vib”” Mechanical Systems and Signal Processing, vol. 8, no. 2, properly combined. Computationally speaking, we have pp. 119–127, 1994. improved the algebraic approach in structure; that is, iter- [10] G. Golub and C. V. Loan, “An analysis of the total least ated time integrations can be computed by using a compact squares problem,” SIAM Journal on Numerical Analysis, and clear matrix expression, which is quite well defined and vol. 17, no. 6, pp. 883–893, 1980. [11] K. Worden and G. R. Tomlinson, Nonlinearity in Structural robust due to the good structure of the operational matrix of Dynamics: Detection, Identification and Modelling, Institute of integration in an algebraic sense; the pseudoinverse is always Physics Publishing, Bristol, UK, 2001. possible to be computed and the results are obtained in finite [12] G. R. Tomlinson, “Developments in the use of the hilbert time and well bounded to mention some of them. However, transform for detecting and quantifying non-linearity as- parameter estimations are performed slower like a price to sociated with frequency response functions,” Mechanical pay to achieve stability on calculations. Furthermore, the Systems and Signal Processing, vol. 1, no. 2, pp. 151–171, presented nonlinearity indicator is easy to program and test. 1987. From this study, it is recommended to make a good analysis ® [13] J. Yiu, The Definitive Guide to ARM CORTEX -M3 and ® of numerical methods applied to original data in order to have a good criterion for the final determination of presence 2014. ® CORTEX -M4 Processors, Elsevier, Amsterdam, Netherlands, of nonlinearities. We have considered a reasonable value of [14] W. Mucha, “Real-time finite element simulations on arm η ≤ 0.9 to establish that a given vibrating system exhibits microcontroller,” Journal of Applied Mathematics and Com- putational Mechanics, vol. 16, no. 1, pp. 109–116, 2017. relevant nonlinear oscillating dynamics. Otherwise, vibrat- [15] M. Alessandrini, G. Biagetti, P. Crippa, L. Falaschetti, ing system dynamics could be represented in terms of a L. Manoni, and C. Turchetti, “Singular value decomposition in linear mathematical model, where small parametric non- embedded systems based on arm cortex-m architecture,” linearities can be considered such as unknown disturbances. Electronics, vol. 10, no. 1, 2020. [16] F. Beltran-Carbajal and G. Silva-Navarro, “Output feedback dynamic control for trajectory tracking and vibration sup- Data Availability pression,” Applied Mathematical Modelling, vol. 79, The data used to support the findings of the study are pp. 793–808, 2020. [17] O. Garcia-Perez, G. Silva-Navarro, and J. Peza-Solis, “Flexi- available from the corresponding author upon request. ble-link robots with combined trajectory tracking and vi- bration control,” Applied Mathematical Modelling, vol. 70, Conflicts of Interest pp. 285–298, 2019. [18] V. Ondra, I. A. Sever, and C. W. Schwingshackl, “A method The authors declare that they have no conflicts of interest. for detection and characterisation of structural non-linearities
16 Mathematical Problems in Engineering using the hilbert transform and neural networks,” Mechanical Systems and Signal Processing, vol. 83, pp. 210–227, 2017. [19] S. F. Masri, J. Caffrey, T. K. Caughey, A. W. Smyth, and A. Chassiakosl, “Identification of the state equation in complex non-linear systems,” International Journal of Non- Linear Mechanics, vol. 39, pp. 111–1127, 2004. [20] I. A. Kougioumtzoglou and P. D. Spanosl, “An identification approach for linear and nonlinear time-variant structural systems via harmonic wavelets,” Mechanical Systems and Signal Processing, vol. 37, pp. 338–352, 2013. [21] M. Fliess and H. Sira-Ramirez, “An algebraic framework for linear identification,” ESAIM: Control, Optimization and Calculus of Variations, vol. 9, pp. 151–168, 2003. [22] R. P. Pacheco and V. Steffen, “On the identification of non- linear mechanical systems using orthogonal functions,” In- ternational Journal of Non-Linear Mechanics, vol. 39, pp. 1147–1159, 2004. [23] J. l. Wu, C. h. Chen, and C. f. Chen, “A unified derivation of operational matrices for integration in systems analysis, in- formation technology,” in Proceedings of the International Conference on Coding and Computing, pp. 436–442, Las Vegas, NV, USA, March 2000. [24] I. Kovacic and M. J. Brennan, The Duffing Equation: Nonlinear Oscillators and Their Behaviour, John Wiley & Sons, Hoboken, NJ, USA, 2011. [25] G. R. Tomlinson and I. Ahmed, “Hilbert transform proce- dures for detecting and quantifying non-linearity in modal testing,” Meccanica, vol. 22, no. 3, pp. 123–132, 1987. [26] M. Simon and G. Tomlinson, “Use of the hilbert transform in modal analysis of linear and non-linear structures,” Journal of Sound and Vibration, vol. 96, no. 4, pp. 421–436, 1984. [27] J. N. Juang, Applied System Identification, Prentice-Hall, Hoboken, NJ, USA, 1994. [28] L. G. Trujillo-Franco, G. Silva-Navarro, and F. Beltran-Car- bajal, “Parameter estimation on nonlinear systems using orthogonal and algebraic techniques,” in Proceedings of the Society for Experimental Mechanics Series, Society for Exper- imental Mechanics, pp. 347–354, Springer, Cham, Switzer- land, April 2016. [29] F. Beltran-Carbajal and G. Silva-Navarro, “Generalized nonlinear stiffness identification on controlled mechanical systems,” Asian Journal of Control, vol. 21, no. 3, pp. 1281–1292, 2019. [30] F. Beltran-Carbajal, G. Silva-Navarro, and L. G. Trujillo- Franco, “A sequential algebraic parametric identification approach for nonlinear vibrating mechanical systems,” Asian Journal of Control, vol. 19, no. 5, pp. 1–11, 2017.
You can also read