A Simple and Fast Coordinate-Descent Augmented-Lagrangian Solver for Model Predictive Control
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
A Simple and Fast Coordinate-Descent Augmented-Lagrangian Solver
for Model Predictive Control
Liang Wu1 , Alberto Bemporad1
Abstract— This paper proposes a novel Coordinate-Descent problem construction and other operations on the problem
Augmented-Lagrangian (CDAL) solver for linear, possibly matrices can be done off-line, for linear parameter-varying
parameter-varying, model predictive control problems. At each (LPV) MPC problems, or for LTI problems in which the
iteration, an augmented Lagrangian (AL) subproblem is solved
arXiv:2109.10205v1 [math.OC] 21 Sep 2021
by coordinate descent (CD), whose computation cost depends cost function and/or constraint matrices change at run time,
linearly on the prediction horizon and quadratically on the state constructing the QP problem explicitly online increases the
and input dimensions. CDAL is simple to implement and does complexity of the embedded code. To avoid such a QP con-
not require constructing explicitly the matrices of the quadratic struction phase, in [15] the authors proposed a construction-
programming problem to solve. To favor convergence speed, free solver for linear MPC based on an active-set method,
CDAL employs a reverse cyclic rule for the CD method, the
accelerated Nesterov’s scheme for updating the dual variables, whose implementation however requires more complex op-
and a simple diagonal preconditioner. We show that CDAL erations than those involved in first-order algorithms.
competes with other state-of-the-art first-order methods, both
in case of unstable linear time-invariant and prediction models A. Contribution
linearized at runtime. All numerical results are obtained from This paper describes a novel construction-free MPC solver
a very compact, library-free, C implementation of the proposed
CDAL solver. for both LTI and LPV MPC problems that is very simple
Index Terms— Augmented Lagrangian method, coordinate to code and computationally efficient. The solver is based
descent method, model predictive control on combining coordinate descent (CD) and augmented La-
grangian (AL) methods.
I. I NTRODUCTION Coordinate descent has received extensive attention in
recent years due to its application to machine learning [16]–
Model predictive control (MPC) has been widely used for
[18] and other applications [19]. Random and accelerated
decades to control multivariable systems subject to input and
variants of the CD method were proposed in [20]–[23]. In
output constraints [1]. Apart from small-scale linear time-
this paper, we will exploit the special structure arising from
invariant (LTI) MPC problems whose explicit MPC control
linear MPC formulations when applying CD.
law can be obtained [2], deploying an MPC controller in
In [24]–[26], the authors also use AL to solve linear
an electronic control unit requires an embedded Quadratic
MPC problems with input and state constraints using the fast
Programming (QP) solver. In the past decades, the MPC
gradient method [27] to solve the associated subproblems.
community has made tremendous research efforts to develop
The Lipschitz constant of the cost gradient and convexity
embedded QP algorithms [3], based on interior-point meth-
parameters [24] are needed to achieve convergence, and
ods [4], [5], active-set algorithms [6], [7], gradient projection
computing them requires in turn the Hessian matrix of the
methods [8], the alternating direction method of multiplier
subproblem and hence constructing the QP problem. As the
(ADMM) [9], [10], and other techniques [11]–[14].
Hessian matrix of the AL subproblem is close to a block
A demanding requirement for industrial MPC applications
diagonal matrix, this suggests the use of the CD method to
is code simplicity, especially in safety-critical applications in
solve such a QP subproblem, due to the fact that CD does not
which the code must be verified and validated and is easy
require any problem-related parameter. Moreover, only small
to maintain. In this respect, compared to interior-point and
matrices are involved in running the CD method, namely
active-set methods that may require linear algebra operations,
the matrices of the linear prediction model and the weight
first-order methods like gradient projection and ADMM
matrices. As a result, the proposed CDAL algorithm does not
are quite appealing, due to their very simple embedded
require the QP construction phase and is extremely simple
implementation. Most of the proposed approaches, however,
to implement. In addition, each update of the optimization
require that the matrices of the QP problem are constructed
vector has a computation cost per iteration that is quadratic
explicitly (for instance by condensing the MPC problem
with the state and input dimensions and linear with the
through the elimination of equality constraints) in order to
prediction horizon, which makes the proposed algorithm
be consumed by the solver, typically for preconditioning, to
attractive for long prediction horizons.
estimate the Lipschitz constant of the cost gradient, matrix
To improve the convergence speed of CDAL, three tech-
factorizations, and during solver iterations. While this may
niques are proposed in this paper: a reverse cyclic rule
not be an issue for LTI-MPC problems, in which the QP
for CD, Nesterov’s acceleration [27], and preconditioning.
The authors are with the IMT School for Advanced Studies Lucca, Italy, While the use of a reverse cyclic rule in CD still preserves
{liang.wu,alberto.bemporad}@imtlucca.it convergence, when the MPC problem is solved by warm-starting it from the shifted previous optimal solution, the horizon, linear equality constraints or box constraints on the
gap between the initial guess and the new optimal solution is terminal state xT for guaranteed closed-loop convergence, as
mainly caused by the last block of variables, and computing well as affine prediction models. To simplify the notation, in
the last block at the beginning tends to reduce the overall the sequel we consider the following reformulation of (1)
number of required iterations to converge, as we will verify T
X
in the numerical experiments reported in this paper. Since min x̂0t (Ĉ 0 Ŵ Ĉ)x̂t − x̂0t (Ĉ 0 Ŵ r̂t ) + û0t−1 W∆u ût−1
the general AL method has O(1/k) convergence rate [28], t=1
we employ Nesterov’s acceleration scheme for updating the s.t. x̂t+1 = Âxt + B̂ ût
dual vector to improve computation speed, although the
x̂min ≤ x̂t ≤ x̂max , t = 1, . . . , T
accelerated scheme does not reach the expected O(1/k 2 )
convergence rate due to the limit imposed on the number of ûmin ≤ ût ≤ ûmax , t = 0, . . . , T − 1 (2)
xj
iterations of the inner CD loop. To further reduce the outer A B
where x̂j = uj−1 , ûj = ∆uj ,h = [ 0iI ] ∈ Rh i, B̂ =n×n
loop iterations, this paper proposed a heuristic preconditioner rj
[ BI ] ∈ Rn×p , Ĉ = [ C0 I0 ], Ŵ = W0y W0u , r̂j = urj . The
that simply scales the state variables.
vector z of variables to optimize is
The structure of the paper is as follows. Section II formu- 0
z = û00 x̂01 û01 . . . û0T −1 x̂0T ∈ RT (nx +nu )
lates the MPC problem we want to solve. In Section III, we
present the augmented Lagrangian and coordinate descent
The inequality constraints on state and input variables, whose
methods we use to formulate the solver, together with the
number is 2N (nx + nu ), are
reverse cyclic rule, Nesterov’s acceleration scheme, and
preconditioner. In Section IV, two numerical benchmark x̂min ≤ x̂t ≤ x̂max , ∀t = 1, . . . , T
z ≤ z ≤ z̄ ⇔
examples are presented, namely the ill-conditioned AFTI- ûmin ≤ ût ≤ ûmax , ∀t = 0, . . . , T − 1
16 linear MPC example, and the continuously stirred tank At each sample step, the MPC problem (1) can be recast as
reactor (CSTR) MPC example, in which the nonlinear dy- the following quadratic program (QP)
namics is linearized at each controller execution. Finally, we 1 0
draw conclusions in Section V. min z Hz + h0 z
2
B. Notation s.t. z ≤ z ≤ z̄
H 0 (H 0) denotes positive definiteness (semi- Gz = g (3)
definiteness) of a square matrix H, H 0 (or z 0 ) denotes the where H = H 0, H ∈ R0 nz ×nz
, nz = T (nx + nu ),
transpose of matrix H (or vector z), Hi,j denotes the ith h ∈ Rnz , G ∈ RT nx ×nz , and g ∈ RT nx are defined as
row and the jth column element of matrix H, Hi,· , H·,j R 0 ... 0 0
denote the ith row vector, and jth column vector of matrix 0 Q ... 0 0 R = W∆u
H, respectively. For a vector z, kzk2 denotes the Euclidean H =
.. .. .. .. ..
,
. . . . .
norm of z, z6=i the subvector obtained from z by eliminating
Q = Ĉ 0 Ŵ Ĉ
0 0 ... R 0
its ith component zi . 0 0 ... 0 Q
−I
II. M ODEL P REDICITIVE C ONTROL B̂ 0 0 ... 0 0 0
Consider the following MPC formulation for tracking 0 Â B̂ −I ... 0 0 0
G = .
. .. .. .. .. .. .. ..
problems . . . . . . . .
T −1 0 0 0 0 ... Â B̂ −I
X 2 2
kWy (yt+1 − rt+1 )k2 + Wu ut+1 − urt+1
min Ĉ 0 Ŵ r̂
2 −Ax̂k
t=0 Ĉ 0 Ŵ r̂ 0
+ kW∆u ∆ut k2
2 h = .. , g = ..
. .
s.t. xt+1 = Axt + But−1 + B∆ut 0
Ĉ Ŵ r̂ 0
yt = Cxt Clearly matrix G is full row rank. Note that
ut = ut−1 + ∆ut A, B, C, Wy , Wu , W∆u and the upper and lower bounds
xmin ≤ xt ≤ xmax , t = 1, . . . , T on x, u, and ∆u in (1) may change at each controller
execution.
umin ≤ ut ≤ umax , t = 0, . . . , T − 1
III. A LGORITHM
∆umin ≤ ∆ut ≤ ∆umax , t = 0, . . . , T − 1 (1)
A. Augmented Lagrangian Method
in which rt and urt are the output and input set-points, xt ∈
We solve the convex quadratic programming problem (3)
Rnx the state vector, ut ∈ Rnu the input vector, ∆ut = ut −
by applying the augmented Lagrangian method. The bound-
ut−1 the vector of input increments, and yt ∈ Rny the output
constrained Lagrangian function L : Z × Rnz → R is given
vector. We assume that Wy = Wy0 0, Wu = Wu0 0,
0 by
W∆u = W∆u 0. The formulation (1) could be extended to 1
include time-varying bounds on x and u along the prediction L(z, λ) = z 0 Hz + z 0 h + λ0 (Gz − g)
2where Z = {z ≤ z ≤ z̄} and λ ∈ RT nx is the vector of Algorithm 1 Accelerated augmented Lagrangian method
Lagrange multipliers associated with the equality constraints [28]
in (3). The dual problem of (3) is Input: Initial guess z 0 ∈ Z and λ−1 = λ0 ; maximum
number Nout of iterations.
max d(λ) (4) 1. Set α−1 , α0 ← 1; λ̂1 ← λ0 ;
λ∈RT nx
2. for k = 1, 2, · · · , Nout do
where d(λ) = minz∈Z L(z, λ). Assuming that Slater’s con- 2.1. z k ← argminz∈Z Lρ (z, λ̂k );
straint qualification holds, the optimal solution of the primal 2.2. λk ← λ̂k + ρ(Gz k − g);
problem (3) and of its dual (4) coincide. However, d(λ) is not 2.3. if kλk − qλ̂k k22 ≤ , stop;
1 4 2 2
differentiable in general [29], so that any subgradient method 2.4. αk ← 2 ( αk−1 + 4αk−1 − αk−1 );
for solving (4) would have a slow convergence rate. Under αk
2.5. β ← αk−1 − αk ;
the AL framework, the augmented Lagrangian function 2.6. λ̂k+1 ← λk + β(λk − λk−1 );
3. end.
1 0 ρ
Lρ (z, λ) = z Hz + z 0 h + λ0 (Gz − g) + kGz − gk2 (5)
2 2
For box-constrained QP deriving from (1), the correspond-
is used instead, where the parameter ρ > 0 is a penalty ing subproblem (7a) in the AL method is
parameter. The corresponding augmented dual problem is
z k+1 = arg min F (z; λk )
defined as: z (8)
s.t. z ≤ z ≤ z̄
max dρ (λ) (6)
λ∈Rm where
1 0
F (z; λk ) = z HA z + (hkA )0 z
where dρ (λ) = minz∈Z Lρ (z, λ). The dual problem (4) 2
and the augmented dual problem (6) share the same optimal hkA = ρ1 h + G0 λk − G0 g, and HA = 1
+ G0 G has the
ρH
solution [30], and most important dρ (λ) is concave and block-sparse structure
differentiable, with gradient [29], [31]
φ φ 0 0 0 ... 0 0 0
1 2
0
∇dρ (λ) = Gz ∗ (λ) − g φ2 φ30 φ4 φ5 0 ... 0 0 0
0 φ4 φ1 φ2 0 ... 0 0 0
0 φ05 φ02 φ3 φ4 ... 0 0 0
HA = .. .. .. .. .. .. .. .. ..
where z ∗ (λ) denotes the optimal solution of the inner prob- . . . . . . . . .
lem minz∈Z Lρ (z, λ) for a given λ. Moreover, the gradient 0 0 0 0 0 ... φ3 φ4 φ5
φ04
mapping ∇dρ : Rm → Rm is Lipschitz continuous, with 0 0 0 0 0 ... φ1 φ2
Lipschitz constant Ld = ρ−1 . The AL algorithm can be 0 0 0 0 0 ... φ05 φ02 φ6
expressed as follows [30] where
φ1 = ρ1 R + B 0 B, φ2 = −B 0
z k+1 = argmin Lρ (z, λk ) (7a) φ3 = ρ1 Q + (I + A0 A) , φ4 = A0 B
z∈Z
λk+1 = λk + ρ(Gz k+1 − g) (7b) φ5 = −A0 , φ6 = ρ1 Q + I
Since G is full rank, matrix HA 0.
which involves the minimization step of the primal vector z For solving the strongly convex QP (8), the fast gradient
and the update step of the dual vector λ. As shown in [30], projection method was used in [24], [26]. Inspired by the fact
the convergence of AL can be assured for a large range of that the Gauss-Seidel method in solving block tridiagonal
values of ρ. Obviously, the larger the penalty parameter, the linear systems is efficient [32], in this paper we propose
faster the AL algorithm will be, but the condition number the use of the cyclic CD method to make full use of block
of the Hessian matrix of subproblem (7a) will be larger, sparsity and avoid the explicit construction of matrix HA .
which in general makes (7a) more difficult to solve. The Note that in the gradient projection method or fast gradient
convergence rate of the AL algorithm (7) is O(1/k) accord- projection method [26], the Lipschitz constant parameter
ing to [28] and thus the parameter ρ tends to trade off the deriving from matrix HA needs to be calculated or estimated
convergence rates to optimality and to feasibility. To improve to ensure convergence. Therefore, for linear MPC problems
the speed of the AL method, [28] proposed an accelerated that change at runtime such methods would be less preferable
AL algorithm whose iteration-complexity is O(1/k 2 ) for than cyclic CD. In this paper, by making full use of the
linearly constrained convex programs by using Nesterov’s structure of the subproblem, we will implement a cyclic CD
acceleration technique. The accelerated AL algorithm is method that requires less computations, as we will detail in
summarized in Algorithm 1. the next section.B. Coordinate Descent Method Procedure 2 One full pass of reverse cyclic coordinate
descent on all block variables
The idea of the CD method is to minimize the objective
function along only one coordinate direction at each iteration, Input: Λ = {λ1 , . . . , λT }, Û = {û0 , · · · , ûT −1 }, X̂ =
while keeping the other coordinates fixed [33], [34]. In [35], {x̂0 , x̂1 , · · · , x̂T }; MPC settings A, B, Q, R, ûmin , ûmax ,
[36], the authors showed that the CD method is convergent in x̂min , x̂max ; Algorithm setting ρ.
convex differentiable minimization problems, and the rate of 1. x̂T ← CCD { 1 Q + I, −λT − Ax̂T −1 − B ûT −1 };
convergence is at least linear. We first give a brief introduc- x̂T ∈[x̂min ,x̂max ] ρ
tion of the CD method to solve (8). Under the assumption 2. ûT −1 ← CCD { 1 R + B 0 B, B 0 (λT + Ax̂T −1 −
ûT −1 ∈[ûmin ,ûmax ] ρ
that the set of optimal solutions is nonempty and that the x̂T )};
objective function F is convex, continuously differentiable, 3. for t = T − 1, T − 2, . . . , 1 do
and strictly convex with respect to each coordinate, the CD 3.1. x̂t ← CCD { ρ1 Q + I + A0 A, −(λt + Ax̂t−1 +
method proceeds iteratively for k = 0, 1, . . . , as follows: x̂t ∈[x̂min ,x̂max ]
B ût−1 ) + A0 (λt+1 + B ût − x̂t+1 )};
choose ik ∈ {1, 2, . . . , nz } (9a) 3.2. ût−1 ← CCD { ρ1 R + B 0 B, B 0 (λt + Ax̂t−1 −
zik+1 = k
argmin F (zik , z6= ik ; λk ) (9b) ût−1 ∈[ûmin ,ûmax ]
k
zik ∈Z x̂t )};
where with a slight abuse of notation we denote by 4. end.
k k
F (zik , z6= ik ; λk ) the value F (z; λk ) when z6=ik = z6=ik is Output: Û , X̂.
fixed. The convergence of the iterations in (9) for k → ∞
depends on the rule used to choose the coordinate index ik .
Procedure 3 One pass of reverse cyclic coordinate descent
In [36], the authors show that the almost cyclic rule and
for Step 3.2 of Procedure 2
Gauss-Southwell rule guarantee convergence. Here we use
the almost cyclic rule, that provides convergence according Input: λt , ût , x̂t ; MPC settings A, B, R, ûmin , ûmax ;
to the following lemma: Algorithm setting ρ.
Lemma 1 ( [36]): Let zk be the sequence of 1. Vt ← λt + Ax̂t−1 + B ût−1 − x̂t ;
coordinate-descent iterates (9), where every coordinate 2. for i = nu , . . . , 1 do
index is iterated upon at least onceon every N successive 2.1. s ← ρ1 Ri,· ût−1 + (B·,i )0 Vt ;
iterations, N ≥ nz . The sequence z k converges at least h iûmax,i
s
linearly to the optimal solution z ∗ of problem (8). 2.2. θ ← ût−1,i − 1 R +(B 0 B) ;
ρ ii ii
ûmin,i
In this paper we will use the reverse cyclic rule 2.3. ∆ ← θ − ût−1,i ;
ik = nz − (k mod nz ) 2.4. ût−1,i ← θ;
2.5. Vt ← Vt + ∆B·,i ;
to exploit the fact that the shifted previous optimal so-
3. end.
lution is used as warm start, a rule that clearly satisfies
the assumptions for convergence. The implementation of Output: ût−1 .
one pass through all nz coordinates using reverse cyclic
CD is reported in Procedure 2. For given M ∈ Rns ×ns ,
d ∈ Rns , the operator CCD[s,s̄] {M, d} used in Procedure 2 C. Preconditioning
represents one pass iteration of the reverse cyclic CD method
Preconditioning is a common heuristic for improving the
through all ns coordinates sns , . . . , s1 for the following box-
computational performance of first-order methods. The op-
constrained QP
timal design of preconditioners has been studied for several
1
min s0 M s + s0 d (10) decades, but such computation is often more complex than
s∈[s,s̄] 2 the original problem and may become prohibitive if it must
that is to execute the following ns iterations be executed at run time. Diagonal scaling is a heuristic
for i = ns , . . . , 1 preconditioning that is very simple and often beneficial. In
h is̄i this paper, we propose to make the change of state variables
si ← si − M1i,i (Mi,· s + di ) (11) x̄ = Ex, where E is a diagonal matrix whose ith entry is
si
end q
s̄
Ei,i = Qi,i + A0·,i A·,i (13)
where [si ]si is the projection operator
i
s̄i if si ≥ s̄i and replace the prediction model xk+1 = Axk + Buk by
s̄
[si ]si = si if si < si < s̄i (12)
i x̄k+1 = Āx̄k + B̄uk
si if si ≤ si
An efficient way of evaluating Step 3.2 (and also Step 2) of where Ā = EAE −1 and B̄ = EB. The weight matrix Q
Procedure 2 is reported in Procedure 3. Note that Procedure and constraints [xmin , xmax ] are scaled accordingly by setting
2 requires O(T (n2x + n2u )) arithmetic operations. Q̄ = E −1 QE −1 and x̄min = E −1 xmin , x̄max = E −1 xmax .D. CDAL algorithm A. AFTI-16 Benchmark Example
The open-loop unstable linearized AFTI-16 aircraft model
The overall solution method described in the previous reported in [38], [39] is
section is summarized in Algorithm 4, that we call CDAL.
The CDAL algorithm combines CD with the AL method, −0.0151 −60.5651 0 −32.174
−0.0001 −1.3411 0.9929 0
ẋ = 0.00018 43.2541 −0.86939 x
making use of the reverse cyclic rule for CD and Nesterov’s
0
acceleration scheme and preconditioning for AL, that we
0 0 1 0
have specialized for the MPC formulation (2). The AL −2.516 −13.136
(outer) iterations are executed for maximum Nout iterations, −0.1689 −0.2514
+ −17.251 −1.5766
u
the CD (inner) iterations for at most Nin iterations. The
0 0
tolerances out and in are used to stop the outer and h i
y = 0 1 0 0
0 0 1 x
inner iterations, respectively. The C-code implementation of 0
Algorithm 4 is library-free and consists of about 150 lines of
The model is sampled using zero-order hold every 0.05 s.
code, which is tested in MATLAB R2020a C-Mex Interface.
The input constraints are |ui | ≤ 25◦ , i = 1, 2, the output
constraints are −0.5 ≤ y1 ≤ 0.5 and −100 ≤ y2 ≤ 100. The
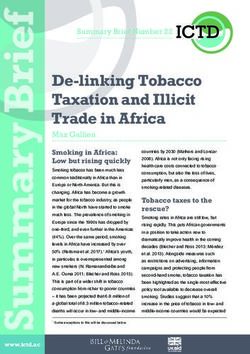
Algorithm 4 Accelerated reverse cyclic CDAL algorithm for control goal is to make the pitch angle y2 track a reference
linear (or linearized) MPC signal r2 . In designing the MPC controller we take Wy =
Input: primal/dual warm-start U 0 = {û0 , û1 , · · · , ûT −1 }, diag([10,10]), Wu = 0, W∆u = diag([0.1, 0.1]), and the
X 0 = {x̂0 , x̂1 , · · · , x̂T }, Λ−1 = Λ0 = {λ1 , λ2 , · · · , prediction horizon is T = 5.
λT }; MPC settings {A, B, C, Wy , Wu ,W∆u , ∆umin , To investigate the effects of the three critical techniques
∆umax , umin , umax , xmin , xmax }; Algorithm settings (reverse cyclic rule, acceleration, and preconditioning) that
{ρ, Nout , Nin out , in } we have introduced to improve the efficiency of the CDAL
algorithm, we performed closed-loop simulations on eight
1. α−1 , α0 ← 1; Λ̂1 ← Λ0 ; schemes with fixed ρ = 1: 0-CDAL, the basic scheme,
2. for k = 1, 2, · · · , Nout do without acceleration and reverse cyclic rule; R-CDAL, the
2.1. Û ← U k−1 , X̂ ← X k−1 ; scheme with the Reverse cyclic rule; A-CDAL, the Ac-
2.2. for kin = 1, 2, · · · , Nin do celerated scheme; AR-CDAL, the Accelerated scheme with
2.2.1. Update Û , X̂ by Procedure 2 with Λ = Λk−1 ; the Reverse cyclic rule, and their respective schemes with
2.2.2. if kÛ − U k−1 k22 ≤ in and kX̂ − X k−1 k22 ≤ in preconditioner, namely P-CDAL, P-R-CDAL, P-A-CDAL,
break the loop; and finally CDAL that includes all the proposed techniques.
The stopping criteria are defined by in = 10−6 , out =
2.3. U ← Û ; X k ← X̂;
k
10−4 , and Nout , Nin are set to the large enough value 5000
2.4. for t = 1, . . . , T do
in order to guarantee good-quality solutions. The closed-loop
2.4.1. λkt = λ̂kt + Ax̂t−1 + B ût−1 − x̂t ; performance of these eight schemes are almost indistinguish-
2.5. if kΛk − q Λ̂k k22 ≤ out stop; able and are reported in Figure 1. It can be seen that the pitch
1
2.6. αk ← 2 ( αk−1 4 2
+ 4αk−1 2
− αk−1 ); angle correctly tracks the reference signal from 0◦ to 10◦
αk
2.7. β ← αk−1 − αk ; and then back to 0◦ and satisfies both the input and output
2.8. Λ̂k+1 ← Λk + β(Λk − Λk−1 ); constraints.
The computational load associated with the above schemes
3. end.
is listed in Table I, in which the last column represents
Output: U, X, Λ the closed-loop performance. In this paper, the closed-
loop performance is denoted by the average value of the
MPC cost during the whole close-loop runtime, namely 2
1
PT −1 2 r
T t=0 kWy (yt+1 − rt+1 )k2 + Wu ut+1 − ut+1 2
+
2
kW∆u ∆ut k2 . Since each execution time step will require
IV. N UMERICAL E XAMPLES different inner iterations and outer iterations to offer the
required tolerances, the “avg” and “max” means the av-
erage and maximum iterations (or CPU time) computed
In this section we test the CDAL solver on two benchmark over the entire closed-loop execution. It can be seen that
examples used in the Model Predictive Control Toolbox for the maximum and average number of inner-loop iterations
MATLAB [37]: an ill-conditioned AFTI-16 control problem of R-CDAL are smaller than that of CDAL (especially
[38], [39] based on LTI-MPC, and MPC of a nonlinear the maximum number), while their outer-loop iterations are
CSTR [40] using LPV-MPC based on linearizing the model almost the same, which shows that the reverse cyclic rule
at each sample step. The reported simulation results were provides a significant improvement. Although A-CDAL has
obtained on a MacBook Pro with 2.7 GHz 4-core Intel Core fewer outer-loop iterations, it has more inner-loop iterations
i7 and 16GB RAM. than CDAL on average. It therefore does not result in asolution time. Note that in this case the controller is LTI-
10
MPC, and hence the MPC problem construction and matrix
y2
5
factorizations required by OSQP can be performed offline.
0
On the other hand, in case of LPV-MPC problems the total
0 20 40 60 80 100 120 140 160 180 200
0.5
computation time would be spent online and the embedded
code would also include routines for problem construction
y1
0
and matrix factorization functions. Instead, CDAL does not
-0.5
0 20 40 60 80 100 120 140 160 180 200 require any construction nor factorizations, thus making the
20
solver very lean and fast also in a time-varying MPC setting,
as investigated next.
u1
0
-20
0 20 40 60 80 100 120 140 160 180 200 TABLE II: Computational load of CDAL with different
20 values of ρ and comparison with OSQP
u2
0
-20
ρ inner iters outer iters time (ms) cost
avg max avg max avg max
0 20 40 60 80 100 120 140 160 180 200
time
1 63 267 10 50 1.0 11.6 42.561
0.5 46 206 12 60 0.9 8.4 42.590
Fig. 1: Linear AFTI-16 closed-loop performance 0.2 31 123 16 89 0.7 5.1 42.612
0.1 24 108 18 95 0.6 4.7 42.619
0.05 18 73 20 85 0.5 4.2 42.618
0.01 7 44 29 144 0.5 4.4 42.620
significant reduction in total computation time. We can see OSQP - - 530 6950 0.6 10.1* 42.627
that AR-CDAL achieves fewer iterations both in the inner 1.5 13.8**
loop and outer loop and has better average and worst-case * : pure solution time, without including matrix factorization
**
computation performance. It can also be seen from Table I : total time (MPC construction + solution)
that preconditioning significantly reduces the number of
outer-loop iterations. B. Nonlinear CSTR Example
TABLE I: Computational performance of different schemes To illustrate the performance of CDAL when the lin-
ear MPC formulation (1) changes at runtime we consider
method inner iters outer iters time (ms) cost the control of the CSTR system [40], described by the
avg max avg max avg max
continuous-time nonlinear model
0-CDAL 75 2616 338 2103 6.4 72.4 42.301 dCA −EaR
R-CDAL 8 33 340 2102 5.4 67.8 42.574 dt = CA,i − CA − k0 e T CA
−EaR
A-CDAL 144 2616 38 174 5.0 44.9 42.548 dT (14)
dt = Ti + 0.3Tc − 1.3T + 11.92k0 e T CA
AR-CDAL 58 165 38 177 3.7 39.5 42.670
y = CA
P-CDAL 282 2597 32 170 2.6 16.2 42.534
P-R-CDAL 27 67 32 170 1.2 15.8 42.525 where CA is the concentration of reagent A, T is the
P-A-CDAL 303 2597 10 50 2.3 12.4 42.575
CDAL 63 267 10 50 1.0 11.6 42.561
temperature of the reactor, CA,i is the inlet feed stream
concentration, which is assumed to have the constant value
10.0 kgmol/m3 . The process disturbance comes from the
Next, we investigate the effect on computation efficiency inlet feed stream temperature Ti , which has slow fluctuations
of parameter ρ, that we expect to tend to trade off feasibility represented by Ti = 298.15 + 5 sin(0.05t) K. The manip-
versus optimality. In particular, we expect larger values of ulated variable is the coolant temperature Tc . The constants
ρ to favor feasibility, i.e., provide more inner-loop iterations k0 = 34930800 and EaR = −5963.6 (in MKS units).
and less outer-loop iterations, and vice versa. The compu- The initial state of the reactor is at a low conversion
tational performance results obtained by performing closed- rate, with CA = 8.57 kgmol/m3 , T = 311 K. The control
loop simulations using the final CDAL algorithm for different objective is to adjust the reactor state to a high reaction rate
values of ρ between 0.01 and 1 are listed in Table II, along with CA = 2 kgmol/m3 , which is a quite large condition. The
with the results obtained by using the OSQP solver [10], that MPC controller manipulates the coolant temperature Tc to
we used to compare CDAL with a state-of-the-art first-order track a concentration reference as well as reject the measured
method for QP. The tolerances used in OSQP are set to 10−6 disturbance Ti . Due to its nonlinearity, the model in (14) is
to provide comparable closed-loop performance. linearized online at each sampling step:
Table II confirms that, as ρ decreases, the number of inner-
loop iterations gets smaller while the number of outer-loop dx ∂f ∂f
≈ f (xt , ut−1 , p)+ (x−xt )+ (u−ut−1 )
iterations gets larger. When the parameter value is between dt ∂x xt ,ut−1 ,p ∂u xt ,ut−1 ,p
0.01 and 0.1, the CDAL algorithm has very similar compu- where f (x, u, p) is the mapping defined in (14) for x =
tational burden, that is lighter than that of OSQP. Regarding [CA T ]0 , u = Tc , p = [CA,i Ti ]0 . By setting Ac =
this latter solver, we split between QP problem construction ∂f ∂f
time (including the required matrix factorizations) and pure ∂x , Bc = ∂u , ec = f (xt , ut−1 , p) −
xt ,ut−1 ,p xt ,ut−1 ,pTABLE III: Computational performance of CDAL and OSQP
10
CA
solver
8 reference
Concentration
method inner iters outer iters time (ms) cost
6
avg max avg max avg max
4
CDAL 19 50 12 19 0.4 0.8 0.02202
2 OSQP - - 49 49 0.2 0.4* 0.02219
0
1.5 13.8**
0 20 40 60 80 100 120 140 160 180 200
* : solution time
time
** : MPC construction time + solution time
380
360 T
Tc
Temperature
340 Ti V. C ONCLUSION
320
This paper has proposed a cyclic coordinate-descent
300 method in the augmented Lagrangian method framework for
280
0 20 40 60 80 100 120 140 160 180 200
solving linear (possibly parameter-varying) MPC problems.
time We showed that the method is quite efficient and competing
with other existing methods, thanks to the use of a reverse
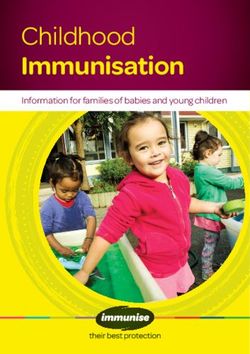
Fig. 2: Nonlinear CSTR closed-loop performance cyclic rule, Nesterov’s acceleration, and a simple heuristic
preconditioner. Besides being easy to code, compared to
many QP solution methods proposed in the literature CDAL
At xt − Bt ut−1 , we get the following linearized continuous- avoids constructing the QP problem and factorizing the
time model resulting matrices, which makes it particularly appealing
d for LPV-MPC problems. Future research will be devoted to
x = Ac x + B c u + e c extend the method to handle nonlinear MPC problems by
dt
solving a sequence of linearized MPC problem within each
We use the forward Euler method with sampling time Ts = sampling period.
0.5 minutes to obtain the following discrete-time model
R EFERENCES
xt+1 = Ad xt + Bd ut + ed [1] S. J. Qin and T. A. Badgwell, “A survey of industrial model predictive
control technology,” Control engineering practice, vol. 11, no. 7, pp.
733–764, 2003.
where Ad = I + Ts Ac , Bd = Ts Bc , ed = Ts ec . Although [2] A. Bemporad, M. Morari, V. Dua, and E. N. Pistikopoulos, “The ex-
held constant over the prediction horizon, clearly matrices plicit linear quadratic regulator for constrained systems,” Automatica,
Ad , Bd and the offset term ed change at runtime, which vol. 38, no. 1, pp. 3–20, 2002.
[3] D. Kouzoupis, G. Frison, A. Zanelli, and M. Diehl, “Recent advances
makes the controller an LPV-MPC. Regarding the perfor- in quadratic programming algorithms for nonlinear model predictive
mance index, we choose weights Wy = 1, Wu = 0, control,” Vietnam Journal of Mathematics, vol. 46, no. 4, pp. 863–882,
W∆u = 0.1. The physical limitation of the coolant jacket 2018.
[4] Y. Wang and S. Boyd, “Fast model predictive control using online op-
is that its rate of change ∆Tc is subject to the constraint timization,” IEEE Transactions on control systems technology, vol. 18,
[−1, 1] K when considering the sampling time Ts = 0.5 no. 2, pp. 267–278, 2009.
minutes. The prediction horizon is T = 10 steps. [5] S. Wright, “Efficient convex optimization for linear MPC,” in Hand-
book of Model Predictive Control. Springer, 2019, pp. 287–303.
We compare again CDAL and OSQP in the LPV-MPC [6] H. J. Ferreau, H. G. Bock, and M. Diehl, “An online active set strategy
setting described above. CDAL is run with in = 10−6 , to overcome the limitations of explicit MPC,” International Journal of
out = 10−4 , ρ = 0.01, and Nout = Nin = 5000, which Robust and Nonlinear Control: IFAC-Affiliated Journal, vol. 18, no. 8,
pp. 816–830, 2008.
is a large number that we chose to optimize closed-loop [7] A. Bemporad, “A quadratic programming algorithm based on nonneg-
performance at best. The tolerances used in OSQP are set to ative least squares with applications to embedded model predictive
10−6 to provide comparable closed-loop performance. The control,” IEEE Transactions on Automatic Control, vol. 61, no. 4, pp.
1111–1116, 2016.
closed-loop simulation results of CDAL and OSQP almost [8] P. Patrinos and A. Bemporad, “An accelerated dual gradient-projection
coincide and are plotted in Figure 2, from which it can algorithm for embedded linear model predictive control,” IEEE Trans-
be seen that CA tracks the reference signal well, and the actions on Automatic Control, vol. 59, no. 1, pp. 18–33, 2013.
[9] S. Boyd, N. Parikh, and E. Chu, Distributed optimization and statisti-
fluctuation of Ti is effectively suppressed. cal learning via the alternating direction method of multipliers. Now
The computational load and closed-loop performance as- Publishers Inc, 2011.
sociated with CDAL and OSQP are reporeted in Table III. [10] B. Stellato, G. Banjac, P. Goulart, A. Bemporad, and S. Boyd,
“OSQP: An operator splitting solver for quadratic programs,” Math-
It is apparent that CDAL leads to a slightly smaller cost ematical Programming Computation, vol. 12, pp. 637–672, 2020,
and that, more important, a shorter execution time (both in http://arxiv.org/abs/1711.08013, Code avaliable at https://github.com/
the average and worst-case) than OSQP, due to the need of oxfordcontrol/osqp. Awarded best paper of the journal for year 2020.
[11] W. Li and J. Swetits, “A new algorithm for solving strictly convex
constructing the QP problem and factorizing the resulting quadratic programs,” SIAM Journal on Optimization, vol. 7, no. 3, pp.
matrices to use the latter method. 595–619, 1997.[12] B. Hermans, A. Themelis, and P. Patrinos, “QPALM: a newton-type [36] ——, “On the convergence of the coordinate descent method for
proximal augmented lagrangian method for quadratic programs,” in convex differentiable minimization,” Journal of Optimization Theory
2019 IEEE 58th Conference on Decision and Control (CDC), 2019, and Applications, vol. 72, no. 1, pp. 7–35, 1992.
pp. 4325–4330. [37] A. Bemporad, M. Morari, and N. L. Ricker, “Model predictive control
[13] A. Bemporad, “A numerically stable solver for positive semi-definite toolbox,” User’s Guide, Version, vol. 2, 2004.
quadratic programs based on nonnegative least squares,” IEEE Trans- [38] P. Kapasouris, M. Athans, and G. Stein, “Design of feedback control
actions on Automatic Control, vol. 63, no. 2, pp. 525–531, 2018. systems for stable plants with saturating actuators,” in Proc. 27th IEEE
[14] N. Saraf and A. Bemporad, “A bounded-variable least-squares solver Conf. on Decision and Control, Austin, Texas, U.S.A., 1988, pp. 469–
based on stable QR updates,” IEEE Transactions on Automatic Con- 479.
trol, vol. 65, no. 3, pp. 1242–1247, 2020. [39] A. Bemporad, A. Casavola, and E. Mosca, “Nonlinear control of
[15] ——, “An efficient non-condensed approach for linear and nonlinear constrained linear systems via predictive reference management,”
model predictive control with bounded variables,” arXiv e-prints, pp. IEEE transactions on Automatic Control, vol. 42, no. 3, pp. 340–349,
arXiv–1908, 2019. 1997.
[16] C.-J. Hsieh, K.-W. Chang, C.-J. Lin, S. S. Keerthi, and S. Sundararajan, [40] D. E. Seborg, D. A. Mellichamp, T. F. Edgar, and F. J. Doyle III,
“A dual coordinate descent method for large-scale linear SVM,” in Process dynamics and control. John Wiley & Sons, 2010.
Proceedings of the 25th international conference on Machine learning,
2008, pp. 408–415.
[17] K.-W. Chang, C.-J. Hsieh, and C.-J. Lin, “Coordinate Descent Method
for Large-scale L2-loss Linear Support Vector Machines.” Journal of
Machine Learning Research, vol. 9, no. 7, 2008.
[18] P. Richtárik and M. Takáč, “Distributed coordinate descent method for
learning with big data,” The Journal of Machine Learning Research,
vol. 17, no. 1, pp. 2657–2681, 2016.
[19] Y. Xu and W. Yin, “A block coordinate descent method for regularized
multiconvex optimization with applications to nonnegative tensor
factorization and completion,” SIAM Journal on imaging sciences,
vol. 6, no. 3, pp. 1758–1789, 2013.
[20] Y. Nesterov, “Efficiency of coordinate descent methods on huge-scale
optimization problems,” SIAM Journal on Optimization, vol. 22, no. 2,
pp. 341–362, 2012.
[21] Y. T. Lee and A. Sidford, “Efficient accelerated coordinate descent
methods and faster algorithms for solving linear systems,” in 2013
IEEE 54th Annual Symposium on Foundations of Computer Science.
IEEE, 2013, pp. 147–156.
[22] Z. Allen-Zhu, Z. Qu, P. Richtárik, and Y. Yuan, “Even faster acceler-
ated coordinate descent using non-uniform sampling,” in International
Conference on Machine Learning. PMLR, 2016, pp. 1110–1119.
[23] D. Leventhal and A. S. Lewis, “Randomized methods for linear
constraints: convergence rates and conditioning,” Mathematics of Op-
erations Research, vol. 35, no. 3, pp. 641–654, 2010.
[24] S. Richter, C. N. Jones, and M. Morari, “Computational complexity
certification for real-time MPC with input constraints based on the fast
gradient method,” IEEE Transactions on Automatic Control, vol. 57,
no. 6, pp. 1391–1403, 2011.
[25] V. Nedelcu, I. Necoara, and Q. Tran-Dinh, “Computational complex-
ity of inexact gradient augmented Lagrangian methods: application
to constrained MPC,” SIAM Journal on Control and Optimization,
vol. 52, no. 5, pp. 3109–3134, 2014.
[26] M. Kögel and R. Findeisen, “Fast predictive control of linear systems
combining Nesterov’s gradient method and the method of multipliers,”
in 2011 50th IEEE Conference on Decision and Control and European
Control Conference. IEEE, 2011, pp. 501–506.
[27] Y. Nesterov, “A method of solving a convex programming prob-
lem with convergence rate O(1/k2 ),” Soviet Mathematics Doklady,
vol. 27, no. 2, pp. 372–376, 1983.
[28] B. He and X. Yuan, “On the acceleration of augmented Lagrangian
method for linearly constrained optimization,” Optimization online,
vol. 3, 2010.
[29] D. P. Bertsekas, “Nonlinear programming,” Journal of the Operational
Research Society, vol. 48, no. 3, pp. 334–334, 1997.
[30] ——, Constrained optimization and Lagrange multiplier methods.
Academic press, 2014.
[31] Y. Nesterov, “Smooth minimization of non-smooth functions,” Math-
ematical programming, vol. 103, no. 1, pp. 127–152, 2005.
[32] P. Amodio and F. Mazzia, “A parallel Gauss–Seidel method for block
tridiagonal linear systems,” SIAM Journal on Scientific Computing,
vol. 16, no. 6, pp. 1451–1461, 1995.
[33] D. G. Luenberger, “Linear and nonlinear programming Addison-
Wesley,” Reading, MA, 1984.
[34] J. M. Ortega and W. C. Rheinboldt, Iterative solution of nonlinear
equations in several variables. SIAM, 2000.
[35] Z.-Q. Luo and P. Tseng, “On the convergence of a matrix splitting
algorithm for the symmetric monotone linear complementarity prob-
lem,” SIAM Journal on Control and Optimization, vol. 29, no. 5, pp.
1037–1060, 1991.You can also read