Radar Stage Sensor (RSS) Operating Manual - Continuous Level Measurement 1.800.548.4264 | www.ftsinc.com - Forest ...
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

EXTREME ENVIRONMENTS. EXTREMELY RELIABLE.
Radar Stage Sensor (RSS) Operating Manual
Continuous Level Measurement
For all variants of SDI-RADAR/SDI-RADAR-64
1.800.548.4264 | www.ftsinc.com
700-RSS-Man Rev 13 15 Jun 2021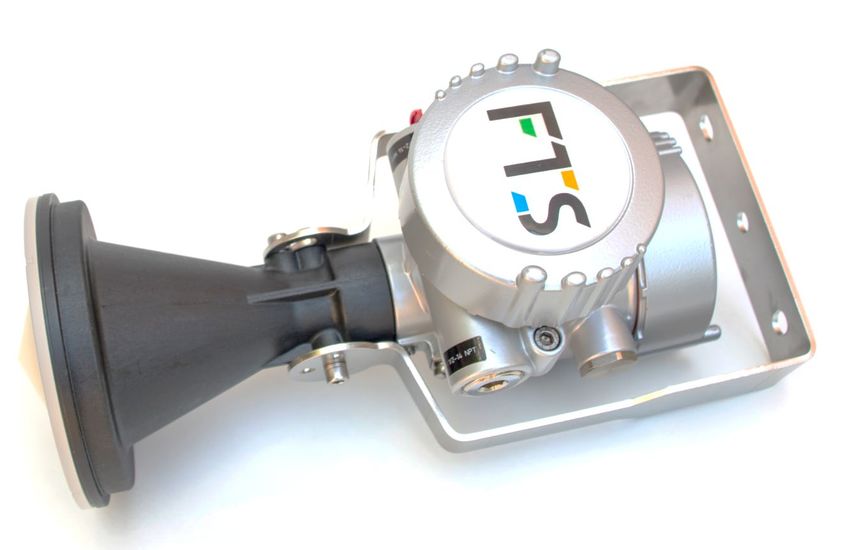
Contact Information
Canadian Headquarters:
1065 Henry Eng Place
Victoria, BC | V9B 6B2 | Canada
www.ftsinc.com
Toll-free: 1.800.548.4264
Local: 250.478.5561
Technical support portal: http://support.ftsinc.com
Email: service@ftsinc.com
Contents
1.1 FUNCTION................................................................................................................................................... 1
1.2 TARGET GROUP .......................................................................................................................................... 1
1.3 REFERENCES ............................................................................................................................................... 1
2.1 AUTHORIZED PERSONNEL ........................................................................................................................ 2
2.2 APPROPRIATE USE ..................................................................................................................................... 2
2.3 GENERAL SAFETY INSTRUCTIONS ............................................................................................................ 2
2.3.1 ELECTROMAGNETIC COMPATABILITY ............................................................................................ 3
2.4 RADIO LICENSE FOR U.S./CANADA .......................................................................................................... 3
2.5 INSTALLATION LIMITATIONS-CANADA .................................................................................................... 3
2.5.1 OPERATING NEAR PENTICTON OR IN THE OKANAGON VALLEY, B.C......................................... 4
3.1 FUNCTIONAL PRINCIPLE ........................................................................................................................... 6
3.1.1 DEFAULT SETTINGS .......................................................................................................................... 6
3.1.2 IMPORTANT: ABOUT THE DEFAULT HART OPERATION MODE .................................................. 6
3.1.3 POWER MODES ................................................................................................................................. 7
3.1.4 SCOPE OF DELIVERY ......................................................................................................................... 7
4.1 SDI-12 MILITARY BAYONET CONNECTOR ............................................................................................... 8
4.2 SDI-12 CONNECTION ................................................................................................................................. 9
4.3 4-20 mA OUTPUT OPTION CONNECTIONS ........................................................................................... 10
5.1 GENERAL ................................................................................................................................................... 12
5.1.1 PROTECTION AGAINST MOISTURE ............................................................................................... 12
5.2 INSTALLATION POSITION........................................................................................................................ 12
5.2.1 MOUNTING DISTANCE ................................................................................................................... 12
5.2.2 POLARIZATION AND SENSOR ORIENTATION .............................................................................. 12
5.2.3 INSTALLATION OBSTRUCTIONS.................................................................................................... 14
5.3 ATTACHING THE MOUNTING STRAP ..................................................................................................... 14
5.4 MOUNTING INSTRUCTIONS ................................................................................................................... 15
i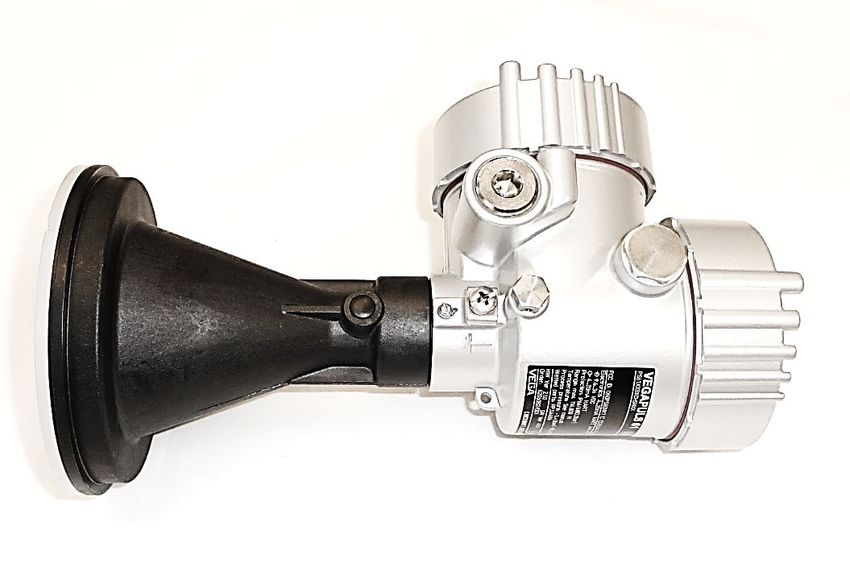
6.1 SETTING UP WITH THE FTS AXIOM DATALOGGERS ............................................................................. 16
6.1.1 SETTING UP USING THE RADAR EXTENSION............................................................................... 17
6.1.2 SETTING UP USING THE SDI GENERIC EXTENSION .................................................................... 20
MAPPING THE RADAR SENSOR TO THE DATALOGGER.............................................................. 22
6.2 SETTING UP WITH NON–FTS DATA LOGGERS ...................................................................................... 23
8.1 USING SDI-12 COMMANDS WITH AXIOM DATALOGGERS .................................................................. 25
8.2 SDI-12 notation ........................................................................................................................................ 26
8.3 GENERAL SDI-12 COMMANDS................................................................................................................ 26
8.4 STANDARD MEASUREMENT COMMANDS ............................................................................................ 27
8.4.1 COMPARISON OF THE M AND M1 COMMANDS ......................................................................... 29
8.4.2 COMPARISON OF POWER MODES WITH NOAA COMMANDS (M3, M4, M5) ........................... 29
8.5 X COMMANDS .......................................................................................................................................... 30
8.5.1 REQUIRED FORMATTING ELEMENTS ........................................................................................... 30
8.5.2 X COMMANDS LIST......................................................................................................................... 31
9.1 GENERAL ................................................................................................................................................... 34
9.2 ATTACHING THE MODULE ...................................................................................................................... 34
9.3 KEY FUNCTIONS ....................................................................................................................................... 35
9.4 MAIN MENU.............................................................................................................................................. 36
9.5 FALSE SIGNAL SUPPRESSION ................................................................................................................. 36
9.6 FALSE ECHO STORAGE ............................................................................................................................ 38
9.6.1 ECHO CURVE MEMORY .................................................................................................................. 38
9.7 CONFIGURING FOR MEASURING WATER LEVELS ................................................................................ 39
9.8 SAVING THE INSTRUMENT SETTINGS .................................................................................................... 40
10.1 REMOVAL .................................................................................................................................................. 41
10.2 DISPOSAL .................................................................................................................................................. 41
11.1 TECHNICAL DATA ..................................................................................................................................... 42
11.2 DEVIATION ................................................................................................................................................ 43
ii
ABOUT THIS DOCUMENT
1.1 FUNCTION
This operating manual provides all the information needed for mounting, connection and setup as
well as important instructions for maintenance and fault rectification. Please read this information
before putting the instrument into operation and keep this manual accessible in the immediate
vicinity of the device.
This manual can be used with the following variants of the Radar Stage Sensor:
SDI-RADAR VARIANTS
Part Number Description
SDI-RADAR Base model, 1.8m (6ft) cable, 35m range
SDI-RADAR-420 4-20mA output
SDI-RADAR-DISP SDI-RADAR with OEM display
SDI-RADAR-DISP-MC SDI-RADAR with OEM display and military connector
SDI-RADAR-MC SDI-RADAR with military connector
SDI-RADAR-MC-50 SDI-RADAR with military connector and 50ft cable
SDI-RADAR-MC-DISP-50 SDI-RADAR with OEM display, military connector, and 50ft cable
SDI-RADAR-64 VARIANTS
Part Number Description
SDI-RADAR-64 Base model, 1.8m (6ft) cable
SDI-RADAR-64-DISP SDI-RADAR-64 with OEM display
• Cable ends are flying leads unless specified as MC (military connector). Radars with a
military connector are for use with FTS Axiom Dataloggers.
• SDI-RADAR-420 an be used to connect to a 4-20mA input on a SCADA system, PLC or chart
plotter.
• The OEM display permits direct interface with the radar and must be used for false echo
suppression. It can be used for the initial setup and then removed.
1.2 TARGET GROUP
This operating manual is directed to trained specialist personnel. The contents of this manual
should be made available to these personnel and put into practice by them.
1.3 REFERENCES
SDI-RADAR information contained in this document references the Vega Puls 61 Operating
Instructions (Vega Document ID: 36499-EN-140922). SDI-RADAR-64 information contained in this
document references the Vega Puls 64 Operating Instructions (Vega Document ID: 5114-EN-190321)
Detailed explanations of Axiom Datalogger operations can be found in the FTS documents Axiom
Operator’s Manual (700-Axiom Man) and the Axiom Telemetry Reference (700-G6-Telem).
700-RSS-Man Rev. 13 15 Jun 2021 Page 1/45
FOR YOUR SAFETY
2.1 AUTHORIZED PERSONNEL
All operations described in these operating instructions manual must be carried out only by trained
specialist personnel.
During work on and with the device the required personal protective equipment must always be
worn.
2.2 APPROPRIATE USE
The FTS Radar Range Sensor is a sensor for continuous level measurement.
You can find detailed information about the area of application in Chapter 3: Product Description.
Operational reliability is ensured only if the instrument is properly used according to the
specifications in the operating instructions manual as well as possible supplementary instructions.
WARNING: Inappropriate or incorrect use of the instrument can give rise to
application specific hazards, e.g. damage to system components through
incorrect mounting or adjustment.
2.3 GENERAL SAFETY INSTRUCTIONS
This is a state-of-the-art instrument complying with all prevailing regulations and guidelines. The
instrument must only be operated in a technically flawless and reliable condition. The operator is
responsible for the trouble-free operation of the instrument.
During the entire duration of use, the user is obliged to determine the compliance of the necessary
occupational safety measures with the current valid rules and regulations, and take note of new
regulations.
The safety instructions in these operating instructions manual, the national installation standards as
well as the valid safety regulations and accident prevention rules must be observed by the user.
For safety and warranty reasons, any invasive work on the device beyond that described in the
operating instructions manual may be carried out only by personnel authorized by the
manufacturer. Arbitrary conversions or modifications are explicitly forbidden.
The safety approval markings and safety tips on the device must also be observed.
700-RSS-Man Rev.13 15 Jun 2021 2/45
The SDI-RADAR emits in the K band range. The low emitting frequencies are far below the
1
internationally approved limit values for exposure restrictions . When used correctly, there is no
danger to health.
The SDI-RADAR-64 emits a continuous, high frequency signal in the W band. The low emission
power is far below the internationally approved limit values for exposure restrictions. When used
correctly, there is no danger to health.
2.3.1 ELECTROMAGNETIC COMPATABILITY
Electromagnetic interference from electrical conductors and radiated emissions must be taken into
account, as is usual with class A instruments. If the instrument is used in a different environment,
the electromagnetic compatibility to other instruments must be ensured by suitable measures.
2.4 RADIO LICENSE FOR U.S./CANADA
The instrument is in conformity with part 15 of the FCC regulations. Take note of the following two
regulations:
• The instrument must not cause any interfering emissions
• The device must be insensitive to interfering emissions, including those that may cause
undesirable operating conditions
Modifications not expressly approved by the manufacturer will lead to expiry of the operating
license according to FCC/IC.
2.5 INSTALLATION LIMITATIONS-CANADA
This device has been approved for both closed containers and open-air environments with the
following limitations:
• Closed Containers: For installations utilizing a tilt during installation: This device is limited to
installation in a completely enclosed container made of metal, reinforced fiberglass or
concrete to prevent RF emissions, which can otherwise interfere with aeronautical navigation,
the maximum approved tilt angel is 10°.
• Open Air Environment: For operation outside of closed vessels, the following condition must
be fulfilled: This device shall be installed and maintained to ensure a vertically downward
orientation of the transmit antenna's main beam. Furthermore, the use of any mechanism
that does not allow the main beam of the transmitter to be mounted vertically downward is
prohibited.
• The installation of the device shall be done by trained installers, in strict compliance with the
manufacturer's instructions.
1
The International limit value for radiation of persons is < 10 mW/m² for a continuous emission. The FTS Radar Stage
Sensor operates emits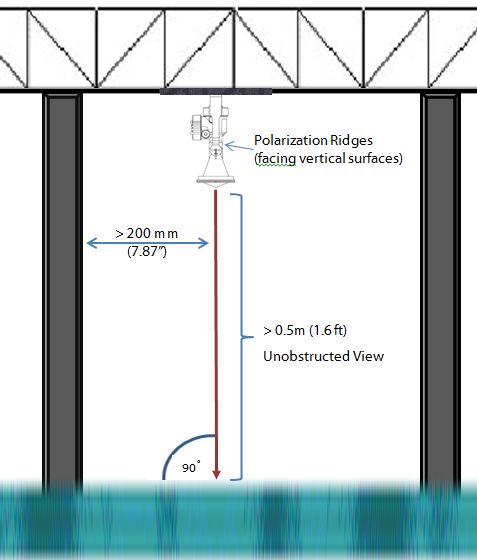
• This device shall be installed only at fixed locations. The device shall not operate while being
moved or while inside a moving container.
• Hand-held applications are prohibited.
• Marketing to residential consumers is prohibited.
• The use of this device is on a "no-interference, no-protection" basis. That is, the user shall
accept operations of high-powered radar in the same frequency band which may interfere
with or damage this device. • However, devices found to interfere with primary licensing
operations will be required to be removed at the user's expense.
2.5.1 OPERATING NEAR PENTICTON OR IN THE OKANAGON VALLEY, B.C.
The installer/user of this device shall ensure that it is at least 10 km from the Dominion
Astrophysical Radio Observatory (DRAO) near Penticton, British Columbia. The coordinates of
the DRAO are latitude 49°19′15″ N and longitude 119°37′12″W. For devices not meeting this 10
km separation (e.g., those in the Okanagan Valley, British Columbia,) the installer/user must
coordinate with, and obtain the written concurrence of, the Director of the DRAO before the
equipment can be installed or operated. The Director of the DRAO may be contacted at 250-
497-2300 (tel.) or 250-497-2355 (fax). (Alternatively, the Manager, Regulatory Standards,
Industry Canada, may be contacted.)
700-RSS-Man Rev.13 15 Jun 2021 4/45
PRODUCT DESCRIPTION
The FTS Radar Range Sensor is a radar sensor for continuous level measurement of liquids under
simple process conditions. It is capable of being mounted using the supplied mounting strap or
optional adaptor flange. Mounting instructions are contained in Chapter 5.
Mounting Strap
Datalogger Interface
Electronics Housing
Electronics Housing
Cable Ports
Mounting Strap
Attachment Points
Antenna Housing
Reference plane
Start of measuring range
Figure 3-1: Parts of the FTS Radar Range Sensor
700-RSS-Man Rev.13 15 Jun 2021 5/45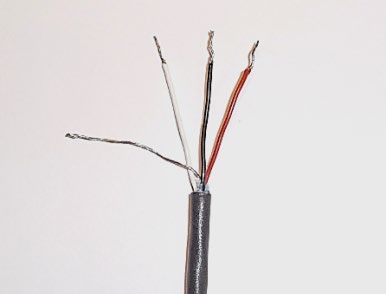
3.1 FUNCTIONAL PRINCIPLE
SDI-RADAR: The antenna of the radar sensor emits short radar pulses with a duration of
approximately 1 ns. These pulses are reflected by the target and received by the antenna as echoes.
The transit time of the radar pulses from emission to reception is proportional to the distance and
hence to the level. The determined level is converted into an appropriate output signal and output
as a measured value.
SDI-RADAR-64: The instrument emits a continuous radar signal through its antenna. This signal is
frequency modulated in the form of a sawtooth wave. The emitted signal is reflected by the medium
and received by the antenna as an echo with modified frequency. The frequency change is
proportional to the distance and is converted into the level.
The measuring range begins physically at the end of the antenna. The min./max. adjustment,
however, begins at the reference plane.
3.1.1 DEFAULT SETTINGS
The radar sensor will arrive with the following factory default settings:
1. SDI address - 0
2. Measuring Units – feet
3. Number of samples to average – 20
4. Power mode – high
5. HART operation mode: multidrop 01 (see section 3.1.2 for important information on this
setting)
3.1.2 IMPORTANT: ABOUT THE DEFAULT HART OPERATION MODE
If using the display and adjustment module to set up the radar two scenarios should be avoided
(explanations follow):
DO NOT:
1) Change the HART Operation mode to Standard
2) Reset the unit to factory defaults
1) The HART Operation Mode: multidrop 01 is the default setting as that requires 12V to
operate. If the HART Operation mode is changed to Standard, the radar will require 15V to
operate. If the on-site power supply cannot provide 15V, the radar will constantly restart
and be unusable, including reverting the unit to HART operation mode: multidrop 01, until a
15V power supply can be provided.
2) If the Vega display and adjustment module is used to reset the sensor to factory default
settings, the unit is returned to the VEGA factory defaults, not those set by the FTS factory,
which may also place the unit into the unusable condition described in (1) until 15V can be
supplied.
700-RSS-Man Rev.13 15 Jun 2021 6/453.1.3 POWER MODES The radar can operate in two power modes: High Power: In high power mode, one sample is taken every second, continuously. These are stored in the buffer and available on demand. Power consumption will be higher but response will be faster for the M command. Low Power: In Low Power mode the radar “wakes up” when a measurement command is received. The warming up cycle takes 65 seconds, so sampling will commence 65 seconds after the measurement command is received. The radar will then return to the dormant state. See section 6.1.1 and 8.3.2 for how to set the power mode using the Datalogger and SDI-12 commands respectively. 3.1.4 SCOPE OF DELIVERY The scope of delivery encompasses: • Radar Stage Sensor and options • Mounting strap with fixing material • Bubble level • Double-sided tape 700-RSS-Man Rev.13 15 Jun 2021 7/45
ELECTRICAL CONNECTIONS
Normally, the radar will be shipped with all internal electrical connections in place. However, should
the supplied cables need to be replaced, the cover from the electronics enclosure on the side of the
instrument must be removed to make the connections. Figure 4-1 shows the electronics enclosure
and the relevant connection points identified.
In the 4-20 mA option, both SDI-12 and the 4-20 MA connections must be made.
4.1 SDI-12 MILITARY BAYONET CONNECTOR
When using the Radar Stage Sensor with an FTS Axiom Datalogger, the sensor is supplied with the
SDI-12 cable with military bayonet connector installed.
Cable wire colour coding and FTS standard connector pin outs are shown in the table and diagram
below:
Wire colour PinError! Function
Bookmark
not
defined.
Red A +12 V DC power supply
White B Data
Black C Ground
If the SDI-12 CABLE is supplied without a connector, the user is responsible for connecting the
sensor to the data collection platform using the “flying leads”. Users can attach their own connector,
connect the cable via a terminal strip, or wire it directly to device electronics. Refer to the wiring
plan to connect the cable wires to the Radar Stage Sensor electronics compartment (Figure 4-2).
Wire colour Pin Function
Red 12VDC 10.6 to 16 VDC Input
White DATA Data
Black GND Ground
Bare (silver) Shield ground
700-RSS-Man Rev.13 15 Jun 2021 8/454.2 SDI-12 CONNECTION
Use 3 wire, shielded cable, preferably with red, black, white colour-coded conductors. Use cable with
a round cross section and an outer diameter of 0.17” to 0.45” to ensure the IP protection rating seal
of the cable gland. Conductor gauge must be in the AWG 20 - 24 range.
SDI-12 connection steps are as follows:
1. Ensure instrument and cable to be attached are not powered.
2. Unscrew the housing cover.
3. Loosen compression nut of the cable entry gland.
4. Remove approximately 10cm (4”) of the cable jacket, strip approximately 1cm (0.4”) of
insulation from the ends of the individual wires.
5. Insert the cable into the sensor through the cable entry.
6. Insert the wire ends into the terminals according to the wiring plan (Figure 4-1).
7. Connect the shield wire to the screw terminal (shield ground) inside the enclosure as shown
in Figure 4-1.
8. Tighten the cable gland nut and replace the housing cover.
SDI-12 cable terminal
connection
Cable Entry
Port
Data
12 VDC
Ground
Compression nut
Shield ground
Figure 4-1: SDI-12 Electronics Compartment and Wiring Plan
700-RSS-Man Rev.13 15 Jun 2021 9/454.3 4-20 MA OUTPUT OPTION CONNECTIONS
Normally, the radar will be shipped with all internal electrical connections in place. However, should
the supplied cables need to be replaced, the cover from the electronics enclosure on the side of the
instrument must be removed to make the connections. Connect the SDI-12 cable as directed in the
previous section.
For the 4-20 mA connection, use two-wire, twisted pair cable without screen. If electromagnetic
interference is expected, screened cable should be used. If screened cable is required, we
recommend connecting the cable screen on both ends to ground potential. In the sensor, the
screen must be connected directly to the internal ground terminal. The ground terminal on the
outside of the housing must be connected to the ground potential (low impedance). Use cable with a
round cross section and an outer diameter of 0.17” to 0.45” to ensure the IP protection rating seal of
the cable gland. Conductor gauge must be in the AWG 20 - 24 range.
4-20mA connection steps are as follows:
1. Ensure instrument and cable to be attached are not powered.
2. Unscrew the housing cover.
3. Loosen compression nut of the cable entry gland.
4. Remove approximately 10cm (4”) of the cable jacket, strip approximately 1cm (0.4”) of
insulation from the ends of the individual wires.
5. Insert the cable into the sensor through the cable entry.
6. Insert the wire ends into the terminals according to the wiring plan (Figure 4-2).
7. Connect the shield wire to the screw terminal inside the enclosure as shown in Figure 4-2.
8. Tighten the cable gland nut and replace the housing cover.
NOTE: Solid conductors as well as flexible conductors with wire end sleeves can be
inserted directly into the terminal openings. In case of flexible conductors without end
sleeves, press the terminal from above with a small screwdriver, the terminal opening is
then free. When the screwdriver is released, the terminal closes again.
700-RSS-Man Rev.13 15 Jun 2021 10/454-20 mA cable
terminal connection SDI-12 cable terminal
connection
Cable Entry
Cable Entry
Port
Port
Compression nut
Figure 4-2: Electronics Compartment
NOTE: 4-20 mA wires will be Red (pos) and Black (neg) in most radars.
Ground
Neg (-
Pos
Figure 4-3: 4-20 mA Wiring Plans
700-RSS-Man Rev.13 15 Jun 2021 11/45MOUNTING
5.1 GENERAL
The radar sensor can be mounted directly onto a vertical, horizontal, or angled surface using the
mounting bracket. Additionally, it can be mounted using an optional flange attachment which
accommodates mounting in an enclosure for added protection and security.
5.1.1 PROTECTION AGAINST MOISTURE
Protect your instrument against moisture ingress through the following measures:
• Only use the supplied cable and gland
• Ensure the cable gland is tightened
• When mounting horizontally, turn the housing so that the cable gland points downward
• Loop the connection cable downward in front of the cable gland
This applies particularly to outdoor mounting and installations in areas where high humidity is
expected (e.g. through cleaning processes).
5.2 INSTALLATION POSITION
When installing the sensor, the following provisions should be followed as closely as possible to
ensure the best operation of the radar. If the site does not permit the ideal radar positioning, orient
the radar as closely as possible to the recommended position to reduce the possibility of false
echoes.
Should the radar return false echoes, these can be suppressed by following the steps in Sections 9.5
and 9.6.
5.2.1 MOUNTING DISTANCE
Ideally, the radar should be mounted at a distance of at least 200 mm (7.874 in), centred on the
conical tip of the antenna housing, to the nearest solid surface.
IMPORTANT! If you cannot maintain the recommended mounting distance, you
should carry out a false signal suppression and false echo storage during setup
(sections 9.5 and 9.6 respectively).
There is no minimum measuring distance; however, the measurement accuracy decreases if the
water surface approaches within a minimum range. Refer to Section 11.2 - Deviation for details.
5.2.2 POLARIZATION AND SENSOR ORIENTATION
The emitted radar impulses of the radar sensor are electromagnetic waves. The polarization is the
direction of the electrical wave component. The position of the polarization is marked with two
integrated ridges opposite each other on the antenna housing.
700-RSS-Man Rev.13 15 Jun 2021 12/45NOTE: When the housing is rotated,
the direction of polarization changes
and hence the influence of the false
echo on the measured value. Keep
this in mind when mounting or
making changes later.
Polarization
Figure 5-1: Polarization Markings
Ideally, the polarization markings should be turned towards the nearest vertical surfaces to
minimize interference with the transmitting waves. Should the site not allow mounting distances
and orientation exactly as shown, there is a possibility of false echoes being returned. Should this
occur, they can be suppressed by following the steps in Sections 9.5 and 9.6.
Direct the sensor as perpendicular as possible to the surface to achieve optimum measurement
results.
Figure 5-2: Ideal Mounting Orientation
700-RSS-Man Rev.13 15 Jun 2021 13/455.2.3 INSTALLATION OBSTRUCTIONS
The mounting location of the radar sensor should provide a clear view to the measured surface with
no equipment or fixtures crossing the signal path. Installations with obstructions such as ladders,
struts, etc., can cause false echoes and impair the useful echo.
If obstructions cannot be fully avoided, false echo storage should be carried out during setup (see
section 9.6).
False echoes can be attenuated through supplementary measures. Small, inclined sheet metal
baffles above the installations scatter the radar signals and prevent direct interfering reflections.
Figure 5-3:
5.3 ATTACHING THE MOUNTING STRAP
The mounting strap enables the radar to be attached to a vertical, horizontal, or boom
mounting. This is a very easy and effective way to align the sensor to a solid surface.
The strap is supplied but must be screwed to the sensor before setup with three hexagon
socket screws (M5 x 10) and spring washers. Required tools: Allen wrench size 4 (5/32”).
Prior to attaching the mounting strap, use it to mark where to drill the holes on the
mounting surface. Ensure you have sufficient hardware of the appropriate type and size for
the mounting surface to securely attach the radar.
To attach the strap to the radar, first remove the three protective caps placed in the
attachment points on the antenna housing shaft.
Slide the mounting strap over the attachment points at 90 degrees to the shaft ensuring the
semi-circular cut out is aligned over the bottom-most screw hole.
700-RSS-Man Rev.13 15 Jun 2021 14/45Figure 5-4: Attaching the Mounting Strap and Adjusting the Angle
Place the locking washers on each of the socket screws, place them in the centre holes and
loosely screw them by hand into the attachment points. Do the same for the inclination
slide.
Adjust the strap to the desired angle and hand tighten the screws using the Allen wrench.
NOTE: Maximum torque when tightening the screws is 2.95 foot pounds (4 newton
metres).
5.4 MOUNTING INSTRUCTIONS
Attach the bubble level to the top of the electronics housing using the two-sided tape.
Attach the mounting strap to the mounting platform.
Observe the bubble level. Adjust the sensor angle as required to level the radar (see section 5.3)
and ensure the mounting strap socket screws are tightened upon completion.
700-RSS-Man Rev.13 15 Jun 2021 15/452
SETTING UP WITH DATA LOGGERS
6.1 SETTING UP WITH THE FTS AXIOM DATALOGGERS
Attach the Radar Stage Sensor to one of the Datalogger’s SDI ports the using the military connector.
There are two extensions which can be used depending on which SDI-12 “M” command is used.
Details of SDI-12 measurement commands can be found in Chapter 8:
M COMMAND USE EXTENSION:
Radar or
M!
SDI Generic
M1!
M2!
SDI Generic
M3!
M4!
M5!
Note that if you wish to log measurements from more than one of the “M” commands, then you
must set the Radar up using the Generic SDI extension. This is useful if you wish to log the average
stage provided by the M command, with the measured distance and internal temperature provided
by the M1 command.
From the Home page select the Sensors icon, Add, and then select the desired extension.
OR
Figure 6-1: Select the Extension
2
For complete details of configuration (logging, current conditions, messages and transmissions etc.) refer to
the Axiom Manual (700-Axiom-Man) and the Axiom Telemetry Reference (700-Axiom–Telem).
700-RSS-Man Rev.13 15 Jun 2021 16/456.1.1 SETTING UP USING THE RADAR EXTENSION
IMPORTANT! Once the Radar is setup, it MUST be mapped. Instructions on mapping
the sensor follow the setup instructions.
After selecting the Radar Extension, the Radar Setup screen will be displayed:
SENSOR TAB:
Sensor Name: The default sensor name is Radar.
This can be changed if desired.
Address: This displays the sensor’s address.
Figure 6-2: Sensor Tab
STAGE TAB
Stage Name: The default name is Stage. This can
be changed as desired.
Units: Use the drop-down menu to select the
desired measurement units. The choices are:
ft (default units), m, or mm.
Precision: This specifies the precision (number of
decimal places) in the value to be used in
computations and displays.
Figure 6-3: Stage Tab
Quality Number (Quality Metric): The default name is Stg_Qual and can be changed as desired.
An internal algorithm determines each reading’s reliability, discarding those which do not
meet the criteria. The quality numbers are in decimal format and indicate the percentage of
the samples taken within the sampling period which met the criteria. The numbers range
from 0 (none met measuring criteria) to 1(100% met measuring criteria).
The criteria for discarding a sample are as follows:
1. Radar did not respond when a sample was requested by the SDI interface;
2. Checksum failure indicating corrupted response from Radar whan a sample requested
by the SDI intrface;
3. The Radar itself indicates a poor measurement due to path blockage, unstable reading,
or multiple echoes.
700-RSS-Man Rev.13 15 Jun 2021 17/45Read: The read button appears on all tabs and
will trigger a sensor reading and return the
measured values for the fields (averaged
Stage and quality metric) in addition to the
measurement time.
Figure 6-4: Read Button Results
SCHEDULE TAB
This tab is used to setup how often samples are
taken and averaged, and how long the
averaging duration lasts.
Interval: This is how often the “M” command
will be sent.
Figure 6-5: Schedule Tab
Offset: This is the time after midnight that the measurement M command will be sent.
Example: The amount of time the sensor will take to make the measurement can be found by
pressing the “Read” button (see example in Figure 6-4). Using the example of 2 seconds, an
Interval of 15 minutes, and an Offset of 00:14:50, the measurement command is sent at
00:14:50. This takes into account the two seconds it takes to return a value, plus an added 8
second padding to ensure the returned values are available at the fifteen-minute mark.
Subsequent measurement commands will be sent at 00:29:50, 00:44:50, etc.
IMPORTANT! When determining Offset times, take into consideration the time it
takes to read the measurements, log the measurements, any processes or
calculations which need those values to run, and the time required to submit data
into the buffer prior to transmission to ensure the most current data available is
transmitted.
Averaging Duration: Only valid samples taken over this duration will be used in the average. Note
whether the radar is in high or low power mode. Durations of 1 to 60 seconds can be entered
with the default being 20 seconds.
700-RSS-Man Rev.13 15 Jun 2021 18/45Mode: There are two power modes:
High Power: In high power mode, one sample is taken every second, continuously. These are
stored in the buffer. When the scheduled time arrives (based on the input interval and offset
times), the most recent samples taken will be used for the average in accordance with the
Averaging Duration (ie: an averaging duration of 20 seconds will use the last 20 samples in the
buffer).
Low Power: In Low Power mode the radar “wakes up” when it is time to take samples in
accordance with the schedule set using the Interval and Offset function. It then starts taking
samples at the rate of one sample per second for the prescribed Averaging Duration, and then
returns to the dormant state. The warming up cycle takes 65 seconds, so sampling will
commence 65 seconds after the Interval/Offset time.
Once all parameters on the three tabs have been input, select OK. One of two screens will appear:
1. You will be returned to the SDI Sensor Mapping screen. Press on the red Vendor/Serial box.
Ensure the message is mapping it to the correct Defined sensor name.
Figure 6-6: Sensor mapping
Select OK. The Radar will be mapped as indicated by no red fields. Complete configuration
by setting up Logging through the Data functions (Home>Data>Setup>Add), Current
3
Conditions, and any other desired parameters .
3
Refer to the Axiom Operator’s Manual (700-Axiom-Man) for complete configuration details.
700-RSS-Man Rev.13 15 Jun 2021 19/45Figure 6-7: Mapped Radar
2. If In-line Logging has been enabled, the In-line Logging Setup screen will appear. Select
Edit and check the desired logging and current conditions boxes. Select OK. You will be
returned to the SDI Sensor Mapping screen which indicates the sensor is now fully mapped
In-line Logging Setup Radar Sensor fully mapped
Figure 6-8: In-Line Logging
6.1.2 SETTING UP USING THE SDI GENERIC EXTENSION
From the Sensor Type screen, select SDI Generic.
Figure 6-9: SDI Generic
Sensor: The default name is SDI. Change as desired.
Address: Input the sensor’s address.
Test: The Test button appears on all tabs and will trigger a sensor reading and return the measured
values for the fields in addition to the measurement time.
Select Add. This displays the SDI Command Setup screen.
700-RSS-Man Rev.13 15 Jun 2021 20/45Figure 6-10: SDI Command Setup screen
Cmd: Input the desired” M” command (M, M1 or M2)
Interval: This is how often the “M” command will be sent.
Offset: This is the time after midnight that the measurement “M” command will be sent.
Example: The amount of time the sensor will take to make the measurement can be found by
pressing the “Test” button. Using the example of 4 seconds, an Interval of 15 minutes, and an
Offset of 00:14:54, the measurement command is sent at 00:14:54. It takes four seconds to
return a value, plus an added 2 second padding to ensure the returned values are available at
the fifteen-minute mark. Subsequent measurement commands will be sent at 00:29:54,
00:44:54, etc.
SETTING UP DATA POINTS
From the SDI Command Setup screen, select Add. This displays the SDI Field Setup screen.
Figure 6-11: Setting up data points
Field: Input the desired data point name
Units: Input the desired measurement units
Field #: Use the arrows to select the field number.
Precision: This specifies the precision (number of decimal places) in the value to be used in
computations and displays.
700-RSS-Man Rev.13 15 Jun 2021 21/45As data points are added, they will be displayed on the SDI Command Setup screen. Once all data
points are added, select OK. Other “M” commands and data points can be added in the same
manner.
Figure 6-12:
Selecting OK on the SDI Sensor Setup screen
displays the Radar Sensor screen with the data
points and latest measured values:
Figure 6-13: Radar Sensor screen
MAPPING THE RADAR SENSOR TO THE DATALOGGER
From the Datalogger’s Home screen, select the SDI-12 icon. Press on the red Vendor/Serial box.
Ensure the message is mapping it to the correct Defined sensor name.
Figure 6-14: Mapping the sensor
Select OK. The Radar will be mapped as indicated by no red fields. Complete configuration
by setting up Logging through the Data functions (Home>Data>Setup>Add), Current
Conditions, and any other desired parameters.
700-RSS-Man Rev.13 15 Jun 2021 22/45Figure 6-15: Mapped sensor
6.2 SETTING UP WITH NON–FTS DATA LOGGERS
If the Radar Range Sensor is being used with non-FTS data loggers, once the connections are made
(see Chapter 4 section 4.1 for cable wire colour coding) and the sensor and data logger have been
powered up, the Radar Range Sensor can be configured using SDI-12 commands (See Chapter 8 –
section 8.2).
The radar sensor will arrive with the following factory default settings:
6. SDI address - 0
7. Measuring Units – feet
8. Number of samples to average – 20
9. Power mode - high
The only setting that will need to be input to commence accurate readings is the Stage Height. This
can be done using the SDI X Commands (Chapter 8, Section 8.3.2).
700-RSS-Man Rev.13 15 Jun 2021 23/454-20 mA OUTPUT OPTION
The FTS Radar Stage Sensor can be ordered with an optional 16 bit 4-20mA output that can be used
to connect to a 4-20mA input on a SCADA system, PLC or chart plotter. The output from the RSS is
connected to the SCADA equipment as shown in the following diagram. The output is isolated from
the SDI-12 power supply and relies on current loop to provide power to the output circuitry. Refer to
Chapter 4 for details of 4-20 mA and SDI-12 electrical connections to the radar.
Figure 7-1: SCADA-RSS connection
The process variable that appears on the 4-20 mA output is the average stage value calculated by
the Radar Stage Sensor. If the RSS is in high power mode, the process variable and 4-20mA output
are updated every second. If the RSS is in low power mode, the process variable and 4-20mA output
are only updated when a SDI-12 measurement command is received.
By default, a stage value of 0 ft is represented by an output current of 4mA and a stage value of
114.8 ft is represented by an output current of 20mA. These defaults can be adjusted using the
aXAOn.nnn! and aXASn.nnn! SDI commands (see Chapter 8) to modify the analog offset and analog
slope respectively. New values for the analog slope and analog offset can be determined using the
following equations:
Analog Slope = 16/(Max Stage – Min Stage) Analog Offset = 4 – Analog Slope * Min Stage
In which:
Max Stage is the maximum stage expected* that will be represented by a 20mA output.
Min Stage is the minimum stage expected* that will be represented by a 4mA output.
*IMPORTANT! Analog slope and offset calculations must use the current units of
stage. If stage units are changed, analog slope and offset must be updated
To set the slope and offset, replace the numeral indicator (“n.nn”) in the commands with the
calculated values of Analog Slope and Analog Offset. Use the commands without values to read back
the slope and offset values to confirm they were set correctly.
The 4-20mA output can be validated using a DMM or the SCADA equipment to measure the output
current. The expected output current can be determined using the following equation:
Analog Output = Analog Slope * Stage + Analog Offset
The 4-20mA output has a resolution of 0.24 uA so use a 6 ½ digit multi-meter for best results.
700-RSS-Man Rev.13 15 Jun 2021 24/45SDI-12 COMMANDS
4
The Radar Range Sensor is capable of reading and writing with the standard set of SDI-12
commands.
8.1 USING SDI-12 COMMANDS WITH AXIOM DATALOGGERS
To use SDI-12 Commands, the Datalogger must be in Transparent Mode. From the Home screen
select the SDI 12 >Transparent Mode.
Figure 8-1: Entering Transparent Mode
Use the drop-down menu to select the port to which the radar is attached (B in our example).
Figure 8-2: Transparent Mode
Use the keyboard to enter commands.
WARNING: When you send an SDI command which configures a device, you are
circumventing the Datalogger's user interface and the Datalogger does not know
about the changed configuration. The new configuration is not reflected in the UI
and the Datalogger continues to function as if the previous configuration is still in
force.
4
For a detailed explanation of SDI-12 protocols and commands refer to SDI-12 Specification, Version 1.3 at
http://www.sdi-12.org
700-RSS-Man Rev.13 15 Jun 2021 25/458.2 SDI-12 NOTATION
SDI-12 commands are strings of characters sent to the SDI-12 device. The format of the strings is
important, and to specify the format of SDI-12 commands different typefaces are used. All
commands to and the replies from the device are represented in a mono-spaced font. Different
parts of a command are represented with variants on this text format
Item Explanation Font Text representation
Command literal Part of a command that must be Bold X
reproduced literally as it appears
Command Part of a command that must be filled in Italic data
parameter with an appropriate value
Address part of First character of command (except Normal a
command Address Query). Valid values 0-9, a-z, A-Z.
Note the following:
• the “a” in each command should be replaced with the sensor address number
• every command must terminate with an exclamation mark (!)
• a C following an M command requests a CRC code in the data return. The CRC is added at
the end of the message for commands with CRC
• the measurement command must be followed by a Send Data command (aD0!) to view the
data
8.3 GENERAL SDI-12 COMMANDS
General SDI-12 commands are used for housekeeping issues such as device address configuration,
device identification and confirmation of device communications. General SDI-12 version 1.3
commands are as follows:
Command Name Command Notes
Code
Address Query ?! Returns address
Acknowledge Active a! Returns the address (a) if active
Change Address aAb! Change the address of the device at SDI address “a”
to new address “b”. Alphanumeric range is 0-9, a-z,
A-Z
Send Identification aI! Response = annmmmmmmmmssssssVXSN#
a = address
nn= SDI-12 version
mmmmmmmm= manufacturer
ssssss = sensor identifier
VX= version
SN# = serial number
700-RSS-Man Rev.13 15 Jun 2021 26/458.4 STANDARD MEASUREMENT COMMANDS
Measurement commands (M commands) trigger a measurement on the addressed sensor.
The format of the response to a Measurement command is atttn: in which:
a the sensor address
ttt the specified time, in seconds, until the sensor will have the measurement(s) ready
n the number of measurement values the sensor will make and return in one or more
subsequent D commands; n is a single digit integer with a valid range of 0 to 9
Concurrent measurement commands (C Commands - aC!) are used if other SDI-12 sensors are on
the bus. When used, the sensor will take measurements while the other SDI-12 sensors on the bus
are also taking measurements. The format of a C command and retrieval of the data is the same as
for M commands.
The data is read using a subsequent Request Data command (aD0!).
If an out-of-range or illegal condition is detected, the M command result(s) are -9999999.
If the M6 command is issued and the radar is in low power mode, zero measurements are returned.
COMMAND(S) RESULTS
aM!
aC! Measures average stage, quality metric
aMC! Averaged over 1-720 samples. Default is 20 samples.
aCC!
aM1!
aC1! Measures instantaneous stage, distance, quality metric, and internal temperature
aMC1! (in C)
aCC1!
aM2!
aC2!
Measures 4-20 mA output current (in mA)
aMC2!
aCC2!
aM3! Supports NOAA distance calculation.
aC3! Measures:
aMC3! • stage,
aCC3! • mean distance,
• standard deviation,
• number of discarded outliers,
• good sample count and
• voltage (in V) as per NOAA water level measuring system.
See section 8.2.2 for details.
Averaged over 2-720 samples. Default is 360 samples.
700-RSS-Man Rev.13 15 Jun 2021 27/45aM4! Supports NOAA distance calculation.
aC4! Measures
aMC4! • stage,
aCC4! • mean distance,
• standard deviation,
• number of discarded outliers,
• good sample count and
• voltage (in V) as per NOAA water level measuring system.
See section 8.4.2 for details.
Averaged over 2-720 samples. Default is 60 samples.
aM5! Supports NOAA distance calculation.
aC5! Measures
aMC5! • stage,
aCC5! • mean distance,
• standard deviation,
• number of discarded outliers,
• good sample count and
• voltage (in V) as per NOAA water level measuring system.
See section 8.2.2 for details.
Averaged over 2-720 samples. Default is 15 samples.
aM6! Returns the last 5 distances measured by the radar. These are the raw distances
aC6! (in configured units) from the radar to the surface, and not stage values.
aMC6! Radar must be in High Power Mode to receive measurement data.
aCC6
Returns 6 measurements in the following order:
• sample index – The position in the rolling sample buffer of the newest
sample. Counts from 0 to 719, then back to 0.
• distance now – the current instantaneous distance measurement
• distance 1 second ago – the instantaneous distance measured 1 second ago
• distance 2 seconds ago – the instantaneous distance measured 1 seconds ago
• distance 3 seconds ago – the instantaneous distance measured 3 seconds ago
• distance 4 seconds ago – the instantaneous distance measured 4 seconds ago
Examples:
0M!00042 4 seconds to measure and return 2 fields
0D0!0+22.648+1.000000
fields returned: stage, quality metric
0M3!00056 5 seconds to measure and return 6 fields
0D0!0+22.647+1.823+0.000664+1+359+11.9
fields returned: stage, distance, deviation, outliers, good samples, voltage
0M6!00016 1 second to return 6 fields
0D0! 0+100+1.238+1.237+1.236+1.235+1.234
fields returned: sample index number, current instantaneous distance,
instantaneous distance one second ago, instantaneous distance two seconds ago,
instantaneous distance three seconds ago, instantaneous distance four seconds ago
700-RSS-Man Rev.13 15 Jun 2021 28/458.4.1 COMPARISON OF THE M AND M1 COMMANDS
The M Command averages all the measurements taken over the Averaging Duration. This produces
less erratic values than the M1 Command, especially in turbulent water, as troughs and crests are
averaged to produce a more accurate assessment of actual stage.
The M1 Command produces more erratic data as the logged value is from a single measurement,
each of which can be influenced by troughs, crests, and other interference resulting in a wide
variance between a series of measurements. No averaging takes place.
POWER
PROCESS COMMENT
MODE
aM! HIGH One sample is taken every second, continuously Higher power
aC! and stored in the buffer. The most recent samples consumption rate, but
aMC! taken will be used for the average in accordance faster response time,
aCC! with the Averaging Duration especially for longer
ie: an averaging duration of 20 seconds will use the averaging durations.
last 20 samples in the buffer.
LOW The radar must “wake up” and warm up. This cycle Low power consumption
takes 65 seconds before sampling starts. Samples rate.
will be taken at the rate of one sample per second Longer response time,
for the prescribed Averaging Duration, and especially for longer
averaged to produce the value. averaging durations.
Once sampling is completed, the radar returns to
the dormant state
POWER
PROCESS COMMENT
MODE
HIGH One sample is taken every second, continuously
Higher power
and stored in the buffer. The last sample is
aM1! consumption rate, but
immediately available and used for data
aC1! faster response time
processing.
aMC1!
LOW Low power consumption
aCC1! The radar must “wake up” and warm up. This cycle
rate.
takes 65 seconds before a single sample is taken. .
Longer response time
8.4.2 COMPARISON OF POWER MODES WITH NOAA COMMANDS (M3, M4, M5)
5
The M3, M4, and M5 commands support the NOAA distance calculation . This measurement
involves:
1) gathering a set of 360 (M3), 60 (M4), or 15 (M5) measurements at a precise 1 second
interval,
2) computing the standard deviation of that set, excluding measurements in the set that are
above and below 3 times the calculated standard deviation, and finally,
3) re-computing the average and standard deviation of the new modified set.
5
In accordance with: https://tidesandcurrents.noaa.gov/levlhow3.html
700-RSS-Man Rev.13 15 Jun 2021 29/45POWER
PROCESS COMMENT
MODE
aM3! HIGH One sample is taken every second, continuously Higher power consumption
aC3! and stored in the buffer. The most recent number rate, but faster response
of samples taken will be used for the NOAA time.
aM4!
calculation.
aC4!
The number of samples taken is in accordance with
aM5! the input number for the specific command.
aC5! LOW The radar must “wake up” and warm up. This cycle Low power consumption
takes 65 seconds before sampling starts. The buffer rate. Slower response
at this time is empty. time.
Samples will be taken at the rate of one sample per
second for the prescribed number of seconds
(samples), and used in the NOAA distance
calculation.
Once sampling is completed, the radar returns to
the dormant state.
8.5 X COMMANDS
In addition to the standard set of commands the FTS Radar Range Sensor has an extension of
custom SDI commands called X commands that access specific features of the sensor.
The format of X commands follows the requirement for standard SDI commands in that the first
character of every command must be a sensor address which is then followed by the X command
and terminated by an exclamation mark. Likewise, the first character of a response is also the
address character.
In “set” commands the n should be replaced with the desired numerals to a maximum of seven
digits (including decimal point).
An invalid parameter in a set command will result in an error message indication in the command
reply when possible within the SDI-12 timing constraints. Set commands should normally be
followed by a get command to verify the parameter set was successful
8.5.1 REQUIRED FORMATTING ELEMENTS
In order for X commands to be valid, the following format conditions must be met:
1) The X and other mandatory characters must be capitalized as shown in the table
2) Do not place spaces within the command
700-RSS-Man Rev.13 15 Jun 2021 30/458.5.2 X COMMANDS LIST
a – replace the a with the sensor address n – replace the n with the desired numerical parameter
X COMMAND DEFINITION COMMENTS
aXPCB! Get Hardware
revision level
aXDOM! Get date of
manufacture
aXFSN! Get factory
Returns serial number
serial number
SDI address - 0
aXFDS! Reset to factory Measuring Units – feet
defaults Number of samples to average – 20
Power mode - high
c=H or L See Section 3.1.2 for an explanation of the
Set power H is high mode power modes and Section 8.2.2 for a
aXPMc! comparison of the modes with different M
mode L is low mode
commands.
Get power
aXPM! The returned power mode will be H for high or L for low.
mode
The slope conversion determines the units of the stage value.
The default stage units are in feet (slope =1.0).
To change the units of measurement change the slope as follows:
Stage Units Abbrev Slope
Feet FT 1.0
Inches IN 12.0
Metres M 0.3048
Set slope of
Centimetres CM 30.48
aXSLn! conversion
Millimetres MM 304.8
value
Custom CU Custom slope as input by user
NOTE: This slope can also be assigned a negative value to
customize the returned stage value. For example, by setting to “-
1”, it can be used in conjunction with aXHAZn! to provide an
offset distance from the measurement datum, eg. for tidal
measurements
Get slope of
aXSL! conversion Will return current Slope as seen in table above.
value
700-RSS-Man Rev.13 15 Jun 2021 31/45X COMMAND DEFINITION COMMENTS
Return stage units in abbreviated format: FT, IN,M,CM,MM or CU
aXSU! Get stage units (refer to slope conversion table above in Set Slope Conversion
Value Command
c = abbreviated form of stage units:
Abbrev Units
FT Feet Setting stage units will
IN Inches automatically change the
M Metres slope value (see Set Slope
aXSUc! Set stage units
CM Centimetres Conversion Value command).
MM Millimetres
If CU or an unrecognized string is entered, there will be no
change to the stage units. Custom slope (stage units) can only
be set using the Set Slope Conversion Value command.
n = measured stage height
Subsequent measurements will use the new offset that is
calculated.
IMPORTANT! Ensure the input stage height value
Set current
aXSHn! is in the same units which are set. Default setting
stage height
is feet. If unsure, use the “Get Stage Unit”
command (aXSU!) to determine units prior to
inputting the stage height.
n = desired height-above-zero (offset)
Input the new height-above-zero.
This value is used in all stage measurements returned.
Set height Typically it is much easier to use a staff gauge, set the stage
aXHAZn!
above zero
height (XSH) appropriately, and let the HAZ be calculated
automatically.
However, for measuring tide levels (or other use cases), this HAZ
offset can be set explicitly.
Get height Returns the stored height-above-zero parameter. This value is
aXHAZ!
above zero calculated automatically after issuing set stage height (XSH).
Set number of n = desired number of samples for averaging
samples to Set the desired number of samples for averaging.
aXNSM+n!
average in the The + sign is required when writing the value.
M! cmd
The valid range is 1 – 720. Default is 20.
700-RSS-Man Rev.13 15 Jun 2021 32/45X COMMAND DEFINITION COMMENTS
Get number of
aXNSM! samples to
Returns the number of samples set for averaging.
average in the
M! cmd
Set number of n = desired number of samples for averaging
aXNSM3+n!
samples to Set the desired number of samples for averaging.
average in the The + sign is required when writing the value.
M3! cmd
The valid range is 2 – 720. Default is 360.
Get number of
aXNSM3! samples to
Returns the number of samples set for averaging.
average in the
M3! cmd
Set number of n = desired number of samples for averaging
aXNSM4+n!
samples to Set the desired number of samples for averaging.
average in the The + sign is required when writing the value.
M4! cmd
The valid range is 2 – 720. Default is 60.
Get number of
aXNSM4! samples to
Returns the number of samples set for averaging.
average in the
M4! cmd
Set number of n = desired number of samples for averaging
aXNSM5+n!
samples to Set the desired number of samples for averaging.
average in the The + sign is required when writing the value.
M5! cmd
The valid range is 2 – 720. Default is 15.
Get number of
aXNSM5! samples to Returns the number of samples set for averaging.
average in the
M5! cmd
n = desired output offset
Set analog
aXAOn! 4-20 mA output offset
offset
Range of offset = 0.0 to 20.0
aXAO! Get analog Returns current value
offset
aXASn! Set analog 4-20 mA output scaling (slope)
slope
aXAS! Get analog Returns current value
slope
700-RSS-Man Rev.13 15 Jun 2021 33/45You can also read

















































