Quantitative Airway Analysis in Longitudinal Studies using Groupwise Registration and 4D Optimal Surfaces
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Quantitative Airway Analysis in Longitudinal
Studies using Groupwise Registration and 4D
Optimal Surfaces
Jens Petersen1 , Marc Modat2 , Manuel Jorge Cardoso2 , Asger Dirksen3 ,
Sebastien Ourselin2 , and Marleen de Bruijne1,4
1
Image Group, Department of Computer Science, University of Copenhagen,
Denmark
2
Centre for Medical Image Computing, Department of Medical Physics and
Bioengineering, University College London, United Kingdom
3
Department of Respiratory Medicine, Gentofte Hospital, Denmark
4
Biomedical Imaging Group Rotterdam, Departments of Radiology & Medical
Informatics, Erasmus MC, Rotterdam, The Netherlands
Abstract. Quantifying local changes to the airway wall surfaces from
computed tomography images is important in the study of diseases such
as chronic obstructive pulmonary disease. Current approaches segment
the airways in the individual time point images and subsequently ag-
gregate per airway generation or perform branch matching to assess re-
gional changes. In contrast, we propose an integrated approach analysing
the time points simultaneously using a subject-specific groupwise space
and 4D optimal surface segmentation. The method combines informa-
tion from all time points and measurements are matched locally at any
position on the resulting surfaces.
Visual inspection of the scans of 10 subjects showed increased tree length
compared to the state of the art with little change in the amount of false
positives. A large scale analysis of the airways of 374 subjects including
a total of 1870 images showed significant correlation with lung function
and high reproducibility of the measurements.
Keywords: CT, airway, lung, longitudinal, segmentation, registration
1 Introduction
Assessing the dimensions and attenuation values of airway walls from Computed
Tomography (CT) images is important in the investigation of airway remodelling
diseases such as Chronic Obstructive Pulmonary Disease (COPD) [4]. Manual
measurements are very time consuming and subject to intra- and inter-observer
variability. Automatic methods are needed to estimate the dimensions of large
parts of the airway tree. Obtaining reproducible measurements is difficult be-
cause of a strong dependence on position in what is a complicated biologically
and dynamically varied tree-like structure. Previous approaches have solved the2 Petersen et al.
problem in two steps: first a step, to segment the airways and conduct the mea-
surements, and second a step to identify anatomical branches or match individ-
ual airway segments in multiple scans of the same subject [12, 10, 3]. The task
of anatomically identifying airway branches poses significant problems even to
medical experts [3]. Most automatic methods therefore do not go beyond the
segmental level, resulting in 32 labelled branches [3, 12]. State of the art segmen-
tation methods can extract many more branches reliably [7], and intra-subject
branch matching can thus increase the information available in longitudinal stud-
ies. It has been done using image registration [10], or association graphs [12].
A limitation of such two-step approaches is that longitudinal information is
not used to the fullest. For instance branches need to be segmented in every
scan in order to be matched even though a branch that is detected in one scan is
most likely present in all. The proposed method improves on this by segmenting
multiple scans of the same subject simultaneously. It is thus able to combine
information from all time points and enables matched measurements, not just
at the branch level, but locally at any point on the resulting surfaces.
2 Methods
An initial airway lumen probability map (section 2.2) was constructed by trans-
ferring initial segmentations of each time point to a per-subject common space
constructed through deformable image registration (section 2.1). A four dimen-
sional optimal surface graph was built from the initial probability map and used
to find the inner and outer airway wall surfaces as the global optimum of a cost
function combining image terms with surface smoothness, surface separation,
and longitudinal penalties and constraints (section 2.3).
2.1 Groupwise Registration of Images
Prior to registration, intensity inhomogeneity due to for instance gravity gradi-
ents and ventilation differences was removed within the lungs using the NiftySeg
software (http://sourceforge.net/projects/niftyseg) [2]. The approach is
using a two-class expectation-maximization based probabilistic framework, which
incorporates both a Markov Random field spatial smoothness term and an intra-
class intensity inhomogeneity correction step.
All registrations have been performed with a stationary velocity field para-
metrisation and using normalised mutual information as a measure of similarity
with the NiftyReg software (http://sourceforge.net/projects/niftyreg)
[8]. For each subject, all time points were aligned to the Frechet mean on the
space of diffeomorphisms, thus providing a common space for analysis and a
one-to-one mapping between time points.
2.2 Initial Segmentation
An initial airway lumen segmentation was obtained in each individual image
using the Locally Optimal Path (LOP) approach of [6]. Segmentations from ev-Airway Analysis in Longitudinal Studies 3
ery scan of the same subject were then warped to the subject-specific groupwise
space and averaged, giving a lumen probability map. By thresholding this using
some value T , it is possible to move freely between the intersection and union
of the segmentations, weighting the amount of included branches against the
amount of false positives. Disconnected components were connected along cen-
trelines extracted from the union segmentation using the method described in
[7]. The voxel based initial segmentation was then converted to triangle mesh
with vertices V and edges E, using the marching cubes algorithm.
2.3 Graph Construction
This section describes how a graph G = (V, E) can be constructed, such that
the minimum cut of G defines the set of surfaces M = I ∪ O where I =
{I0 , I1 , . . . , IN } and O = {O0 , O1 , . . . , ON } are the inner and outer surfaces
of the N scans of the subject. The graph is similar to that of [11], the differences
being the addition of the longitudinal connections and hard constraints.
The vertices of the graph are defined by a set of columns Vim one for each
vertex i ∈ V of the initial mesh and sought surface m ∈ M , and a source s and
a sink vertex t. As in [11] we will let the columns be defined from sampled flow
lines traced inward and outward from i ∈ V. Because they are non-intersecting,
the found solutions are guaranteed to not self-intersect. Tracing is done within a
scalar field arising from the convolution of the binarised initial segmentation with
a Gaussian kernel of scale σ. Sampling is done at regular arc length intervals
relative to i until tracing is stopped due to flattening of the gradient, giving
Ii and Oi inner and outer column points.SSo, Vim = {im k | k ∈ Ki }, where
Ki = {−Ii , 1 − Ii , . . . , 0, . . . , Oi } and V = i∈V,m∈M Vim ∪ {s, t}. In this way,
the column defines the set of all possible solutions for i in the surface m.
c
Let (v → u) denote a directed edge from vertex v to vertex u with capacity
c and wi (k) ≥ 0 be a cost function, giving the cost of vertex k in a column Vim
m
being part of the surface m. This data term can be implemented by the edges:
wim (k) m
n
Ed = (im
k → ik+1 ) | k, k + 1 ∈ Ki ∪
m wim (Oi ) o (1)
∞
(iOi → t), (s → im Ii ) | i ∈ V, m ∈ M .
To prevent degenerate cases where a column is cut multiple times and to preserve
topology, the following infinite cost edges are added:
n o
∞ m
E∞ = (im k → ik−1 ) | i ∈ V, m ∈ M, k − 1, k ∈ Ki . (2)
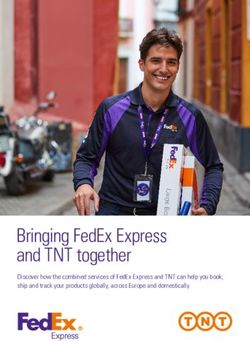
An example of these edges is given in figure 1(a).
Let fi,j,m,n (|k − l|) be a convex non-decreasing function giving the pairwise
cost of both im n
k ∈ Vi and jl ∈ Vj being part of the surfaces m, n ∈ M respectively.
This can be used to implement surface smoothness and longitudinal penalties, see
(equation 7). Additionally let the set I(im k , j, n) = {ζ, ζ + 1, . . . , η} ⊆ {−Ij , 1 −
Ij , . . . , Oj } put pairwise constraints on the solution, such that if im k and jl
n4 Petersen et al.
t t
i3 i3 i3 i3 0
j5 j5
i2 j4 i2 j4 i2 i2 0
i3 i3 1
i1 j3 i1 j3 i1 i1 0
i2 i2 1
j2 j2 i0 i0 0
i0 i0 i1 i1 1
j1 j1
i-1 i-1 i-1 i0 i-10 i0 1
j0 j0
i-2 j-1 i-2 j-1 i-2 i-1 i-20 i-11
j-2 j-2 i-3 i-2 i-3 0 i-21
i-3 i-3
i-4 i-3 i-4
0 i-31
i-4 i-4
s s i-4 i-41
(a) Data and topology (b) Smoothness (c) Separation (d) Longitudinal
Fig. 1. Example columns with Ii = 4, Ij = 2, Oi = 3 and Oj = 5 inner and outer
vertices illustrating the graph as implemented. The dotted edges have infinite capacity
and implement hard topology, smoothness and separation constraints. The solid edge
capacities are given by data term, smoothness, separation and longitudinal penalties.
are both part of it, then l ∈ I(im k , j, n). Such penalties and constraints can be
implemented by:
4(im n
k ,jl ) n
n
Ei = (im
k → jl ) | k ∈ Ki , l ∈ Kj ∪
4(im n
k ,jl ) n
(s → jl ) | l ∈ Kj , k ∈ Kj , k < −Ii ∪
(3)
m 4(im n
k ,jl )
(ik → t) | k ∈ Ki , l ∈ Ki , l > Oj
o
| i, j ∈ V, m, n ∈ M ,
and 4 gives the capacity of the edges as follows:
if l = min I(im
∞ k , j, n)
m n
4(ik , jl ) = 0 / I(im
if l ∈ k , j, n) (4)
4̂(k − l) otherwise
where
0 if x < 0
4̂(x) = fi,j,m,n (1) − fi,j,m,n (0) if x = 0 (5)
fi,j,m,n (x + 1) − 2fi,j,m,n (x) + fi,j,m,n (x − 1) if x > 0.
Similar to the approach of [5], hard constraints was used to force the outer
surfaces to be outside their corresponding inner surfaces and solutions to not
vary more than γ and δ indices in neighbouring columns in the inner and outer
surfaces as follows:
{k, k + 1, . . . , Oj }
if m ∈ Is and n ∈ Os ,
s ∈ {0, 1, . . . , N }
I(ik,m , j, n) = {k − γ, k − γ + 1, . . . , k + γ} if m = n, and n, m ∈ I (6)
{k − δ, k − δ + 1, . . . , k + δ} if m = n, and n, m ∈ O
Kj otherwise.
Airway Analysis in Longitudinal Studies 5
The following pairwise cost were implemented:
pm x if m = n and (i, j) ∈ E
fi,j,m,n (x) = qx if i = j and m ∈ Is , n ∈ Is+1 or m ∈ Os , n ∈ Os+1 (7)
0 otherwise.
pm is the smoothness penalty, defining the cost of each index the solution varies
between neighbouring columns in the same surface m. q is the longitudinal
penalty, defining the cost inherent in the solution for each index corresponding
surfaces are separated in each column within the groupwise space. An illustra-
tion of these edges is given in figure 1(b) and 1(c). The total edge set E is given
by: E = Ed ∪ E∞ ∪ Ei .
The cost functions wkm (k) were set to the first order derivative of the image
intensity in the outward and inward direction of the flow line for the inner and
outer surfaces respectively.
We used the algorithm described in [1] to find the minimum cut.
3 Experiments and Results
3.1 Data
CT images and lung function measurements from the Danish lung cancer screen-
ing trial [9] were used. Images were obtained using a Multi Detector CT scanner
(Philips Mx 8000) with a low dose (120 kV and 40 mAs), reconstructed using
a hard kernel (D) with a resolution of approximately 0.78 mm × 0.78 mm ×
1 mm. The subjects (at inclusion) were men and women, former and current
smokers with at least 20 pack years smoked, between 50 and 70 years of age and
thus at high risk of having COPD.
We used images of 10 subjects for estimation of the parameters and evaluation
of the process of merging the initial segmentations. An independent set of 374
subjects was used to evaluate the ability of the method to detect longitudinal
changes in airway dimensions. From each subject 5 yearly scans were included
out of which 1739 had matching lung function measurements.
3.2 Parameters and Merging of Initial Segmentations
The centrelines of the 10 subjects were moved from the groupwise space to the
space of the last time point scan, in which they were manually checked using in-
house developed software. The software allows movement along the centrelines
while displaying a cross-sectional view of the airway.
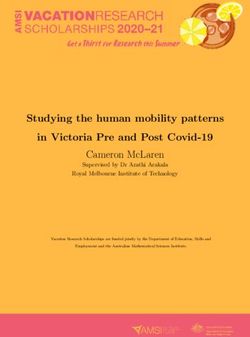
Figure 2(a) and 3(a) show results of varying T - significantly more branches
can be found by fusing information from multiple scans (p < 0.05 for T < 0.4),
while the percentage of false positives does not seem to increase much. We chose
a value of T > 0.2 corresponding to branches present in at least two scans.
Parameters were estimated by aiming to penalize and constrain solutions as
little as possible while still preventing noisy segmentations and the inclusion of6 Petersen et al.
1.0
1000 2000 3000 4000
0.8
Tree Length (Merged)
0.6
Tree Length (LOP)
R^2
mm
False Positives
0.4
True Negatives
0.2
0.0
0
0.0 0.2 0.4 0.6 0.8 0 20 40
(a) Threshold (b) Longitudinal penalty
Fig. 2. Left: Average tree length for different values of the threshold T (blue), average
tree length of the LOP segmentation as a comparison (black dashed), false positives
(red) and true negatives (green) with respect to the union of the segmented branches.
Right: the R2 fit of the relative change in lung volume predicted from relative change
in lumen diameter in each subject with increasing amount of longitudinal penalty.
abutting vessels. The mesh edges were roughly 0.4 mm apart and the flow lines
were sampled at 0.4 mm spacings. pm was set to 15 for all m ∈ M , γ and,
δ to 2 and σ to 0.7 based on visual inspection of results. Figure 3(b) shows a
segmentation result illustrated at two time points.
3.3 Longitudinal Segmentation
Experiments were conducted on the images of the 374 subjects with values
q ∈ {0, 20, 40} of the longitudinal penalty to assess its impact on the method’s
ability to detect changes in airway dimensions over time. Note that a value of 0
is similar to performing multiple independent (3D) searches, but with the added
bonus that the solution meshes will have corresponding vertices. Measures of
Wall Area percentage (WA%) and Lumen Diameter (LD) were computed from
the average distance of the mesh vertices to the branch centreline, which was ex-
tracted from the average segmentation in the groupwise space and transformed to
each individual time point. This enables accurate assessment of subtle localized
changes in airway morphology, but to evaluate the performance of our segmen-
tation to automatically derive known airway imaging biomarkers, we averaged
the measures extracted in the airways of generation 3 to 6.
WA% was found to correlate significantly with lung function at each time
point (Average Spearman’s ρ: −0.29±0.01, p < 0.0001). Different values of q did
not change the results significantly. Reproducibility, quantified by correlating
results at time point one with those of time point two with q = 0, was high:
(Spearman’s ρ: 0.95, 0.94, 0.89 and 0.85 in generation 3, 4, 5 and 6 respectively
p < 0.0001). As expected, increasing q made the reproducibilities go towards 1.
Annual changes of WA% were found to be 0.31 ± 4.9 % significantly different
from 0 (Mann-Whitney U test p < 0.001) with q = 0. Significance disappeared
with q ∈ {20, 40} perhaps evidence that these values are over-penalizing the so-
lutions. No correlation was found between annual changes in WA% and annualAirway Analysis in Longitudinal Studies 7
(a) (b)
Fig. 3. Left: initial segmentation example, at T > 0 (blue), T > 1/5 (green), T > 2/5
(red), T > 3/5 (yellow), and T > 4/5 (white). Right: inner followed by outer surface
segmentations at two corresponding time points. Colors show matching branches.
changes in lung function. This is not surprising giving the relative slow devel-
oping nature of COPD and the known poor reproducibility of lung function
measurements. It is similar to what was previously reported [10].
LD is dependent on the inspiration level and investigating the method’s abil-
ity to detect this dependency can therefore be used as a surrogate for a much
slower pathological change. The relative change in lung volume was thus pre-
dicted from the relative change in LD in each subject. The R2 of all the models
showed significantly better fit when using higher values of q (p < 0.0001 using
Wilcoxon signed rank test), see figure 2(b), indicating that the chosen longitu-
dinal penalties can improve the ability to detect changes in the inner surface.
4 Discussion and Conclusion
We have presented a method for the analysis of airways designed to fully exploit
longitudinal imaging data. The method, in contrast to state of the art, can
use information from all time points and because it outputs surface meshes
with one-to-one correspondences between vertices, enables measurements to be
compared locally without the need for a separate branch matching step. A visual
evaluation of the scans of 10 subjects showed the method found significantly more
complete airway trees with minimal changes to the false positive percentage.
Results on 1870 scans show significant correlation with lung function and highly
reproducible results. Future work will have to better investigate choices for the
longitudinal penalty. For instance it is possible, as indicated by the experiments,
that different values are needed for the inner and outer surfaces, due to the
different contrast values between lumen and wall and between wall and lung
parenchyma. It should also be noted that averaging measurements over large
parts of the airway tree, as done in this work, is ignoring information provided
by the matched measurements, however to limit the scope of the paper we left
it to future work to develop statistical models incorporating this information.
Such models should, we expect, have more power to detect changes.8 Petersen et al.
Acknowledgements. This work was partly funded by EPSRC (EP/H046410/1),
the National Institute for Health Research University College London Hospitals
Biomedical Research Centre (Award 168), the Netherlands Organisation for Sci-
entific Research (NWO), and AstraZeneca Sweden.
References
1. Y. Boykov and V. Kolmogorov. An experimental comparison of min-cut/max-
flow algorithms for energy minimization in vision. IEEE TPAMI, 26(9):1124–1137,
2004.
2. M. J. Cardoso, M. J. Clarkson, G. R. Ridgway, M. Modat, N. C. Fox, and
S. Ourselin. Load: A locally adaptive cortical segmentation algorithm. NeuroIm-
age, 56(3):1386–1397, 2011.
3. A. Feragen, J. Petersen, M. Owen, P. Lo, L. H. Thomsen, M. M. W. Wille, A. Dirk-
sen, and M. de Bruijne. A hierarchical scheme for geodesic anatomical labeling of
airway trees. In MICCAI 2012, Part III, pages 147–155, 2012.
4. M. Hackx, A. A. Bankier, and P. A. Gevenois. Chronic obstructive pulmonary
disease CT quantification of airways disease. Radiology, 265(1):34–48, 2012.
5. X. Liu, D. Z. Chen, M. Tawhai, X. Wu, E. Hoffman, and M. Sonka. Optimal graph
search based segmentation of airway tree double surfaces across bifurcations. IEEE
TMI, 2012.
6. P. Lo, J. Sporring, J. J. H. Pedersen, and M. de Bruijne. Airway tree extraction
with locally optimal paths. In G.-Z. Yang, D. Hawkes, D. Rueckert, A. Noble, and
C. Taylor, editors, MICCAI 2009, Part II, volume 5762 of LNCS, pages 51–58.
Springer, 2009.
7. P. Lo, B. van Ginneken, J. M. Reinhardt, T. Yavarna, P. A. de Jong, B. Irving,
C. Fetita, M. Ortner, R. Pinho, J. Sijbers, M. Feuerstein, A. Fabijanska, C. Bauer,
R. Beichel, C. S. Mendoza, R. Wiemker, J. Lee, A. P. Reeves, S. Born, O. Wein-
heimer, E. M. van Rikxoort, J. Tschirren, K. Mori, B. Odry, D. P. Naidich, I. Hart-
mann, E. A. Hoffman, M. Prokop, J. H. Pedersen, and M. de Bruijne. Extraction
of Airways from CT (EXACT’09). IEEE TMI, 31:2093–2107, 2012.
8. M. Modat, G. R. Ridgway, Z. A. Taylor, M. Lehmann, J. Barnes, D. J. Hawkes,
N. C. Fox, and S. Ourselin. Fast free-form deformation using graphics processing
units. Comput Methods Programs Biomed, 98(3):278–84, 2010.
9. J. H. Pedersen, H. Ashraf, A. Dirksen, K. Bach, H. Hansen, P. Toennesen,
H. Thorsen, J. Brodersen, B. G. Skov, M. Døssing, J. Mortensen, K. Richter,
P. Clementsen, and N. Seersholm. The danish randomized lung cancer CT screen-
ing trial–overall design and results of the prevalence round. J Thorac Oncol,
4(5):608–614, May 2009.
10. J. Petersen, V. Gorbunova, M. Nielsen, A. Dirksen, P. Lo, and M. de Bruijne. Lon-
gitudinal analysis of airways using registration. In Fourth International Workshop
on Pulmonary Image Analysis, 2011.
11. J. Petersen, M. Nielsen, P. Lo, Z. Saghir, A. Dirksen, and M. de Bruijne. Op-
timal graph based segmentation using flow lines with application to airway wall
segmentation. In IPMI, pages 49–60, 2011.
12. J. Tschirren, G. McLennan, K. Palágyi, E. A. Hoffman, and M. Sonka. Matching
and anatomical labeling of human airway tree. IEEE TMI, 24(12):1540–1547, 2005.You can also read