Optimization of synchronized frequency and voltage control for a distributed generation system using the Black Widow Optimization algorithm
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Clean Energy, 2022, 869–882
https://doi.org/10.1093/ce/zkab062
Homepage: https://academic.oup.com/ce
Research Article
Optimization of synchronized frequency and voltage
control for a distributed generation system using the
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
Black Widow Optimization algorithm
Baran Sadeghi1, Nima Shafaghatian2, Reza Alayi3,*, , Mamdouh El Haj Assad4,
Farhad Zishan5 and Hasan Hosseinzadeh6
1
Electrical Engineering Department, Ghazvin Branch, Islamic Azad University, Ghazvin, Iran
2
Electrical Engineering Department, Zanjan University, Zanjan, Iran
3
Department of Mechanics, Germi Branch, Islamic Azad University, Germi, Iran
4
Sustainable and Renewable Energy Engineering Department, University of Sharjah, P O Box 27272, Sharjah, UAE
5
Department of Electrical Engineering, Sahand University of Technology, Tabriz, Iran
6
Department of Mathematics, Ardabil Branch, Islamic Azad University, Ardabil, Iran
*Corresponding author. E-mail: reza.alayi@yahoo.com
Abstract
A distributed generation network could be a hybrid power system that includes wind–diesel power generation
based on induction generators (IGs) and synchronous generators (SGs). The main advantage of these systems
is the possibility of using renewable energy in their structures. The most important challenge is to design the
voltage-control loop with the frequency-control loop to obtain optimal responses for voltage and frequency
deviations. In this work, the voltage-control loop is designed by an automatic voltage regulator. A linear model of
the hybrid system has also been developed with coordinated voltage and frequency control. Dynamic frequency
response and voltage deviations are compared for different load disturbances and different reactive loads.
The gains of the SG and the static volt-ampere reactive compensator (SVC) controllers in the IG terminal are
calculated using the Black Widow Optimization (BWO) algorithm to insure low frequency and voltage deviations.
The BWO optimization algorithm is one of the newest and most powerful optimization methods to have been
introduced so far. The results showed that the BWO algorithm has a good speed in solving the proposed objective
function. A 22% improvement in time adjustment was observed in the use of an optimal SVC. Also, an 18%
improvement was observed in the transitory values.
Received: 23 September 2021; Accepted: 29 November 2021
© The Author(s) 2021. Published by Oxford University Press on behalf of National Institute of Clean-and-Low-Carbon Energy
This is an Open Access article distributed under the terms of the Creative Commons Attribution-NonCommercial License (https://
creativecommons.org/licenses/by-nc/4.0/), which permits non-commercial re-use, distribution, and reproduction in any medium, 869
provided the original work is properly cited. For commercial re-use, please contact journals.permissions@oup.com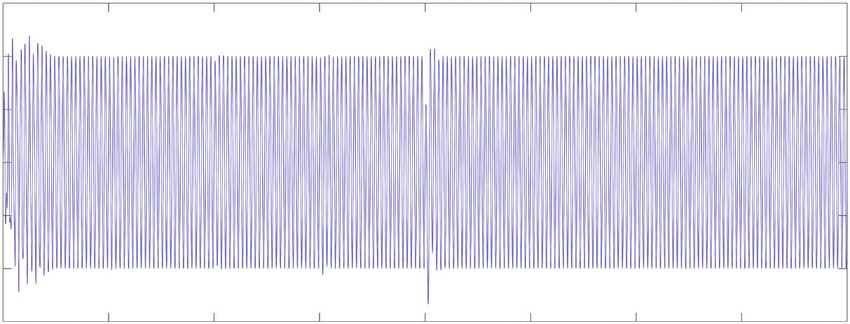
870 | Clean Energy, 2022, Vol. 6, No. 1
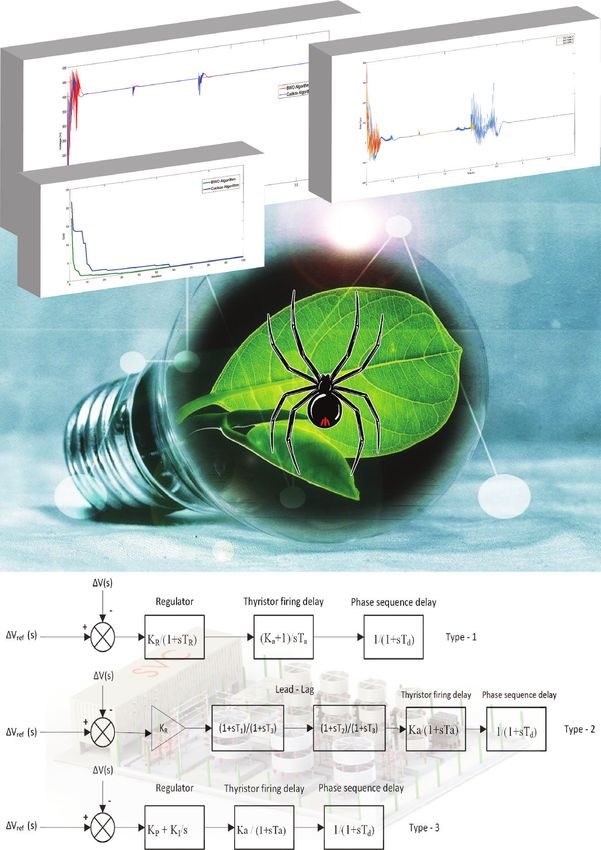
Graphical Abstract
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
Keywords: microgrid; voltage and frequency control; Black Widow Optimization algorithm; dynamic response;
smart grid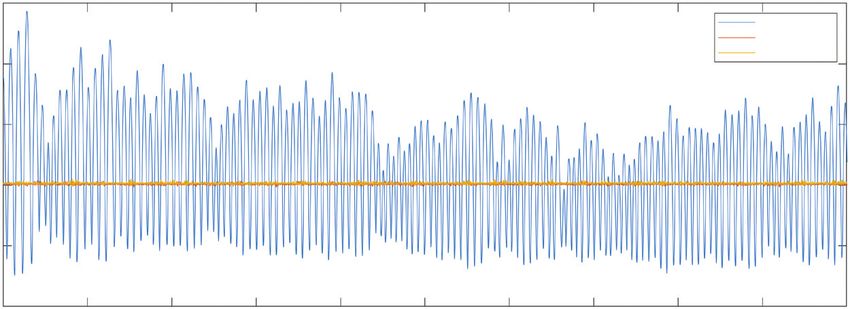
Sadeghi et al. | 871
Introduction Due to the widespread use of microgrids, interconnecting
these systems to form a microgrid cluster enables a higher
The need to reduce CO2 emissions in the field of electri-
utilization of renewable sources [6]. So, a pinning-based
city generation, recent technological advances in the field
multilayer and distributed cooperative control strategy for
of microgrids and the restructuring of the electricity trade
these systems has been presented [6]. A new robust con-
are among the factors involved in increasing interest in
trol method was presented [7] for an islanded microgrid
the use of microgrids. The microgrid can be defined as
consisting of DG units. As in a conventional structure, each
a low-voltage network, such as in a small urban area, a
unit was connected to its local load through a voltage-
shopping mall or an industrial area, with loads attached
source converter, a series resistive–inductive (RL) filter and
to it. These systems may be able to provide both power
a step-up transformer. What was presented was a convex
and heat to local loads [1, 2]. Some microgrid feeders have
optimization problem that led to a low-order dynamic con-
sensitive loads. These feeders require local production and
troller of arbitrary structure in which the microgrid chan-
production units in the microgrid that are called ‘source
nels were all decoupled at the presence of load changes.
microgrids’. The source microgrid can include the fol-
In recent years, due to the construction of these sys-
lowing: wind turbines, fuel cells, inverter-based internal
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
tems around the world, some papers have explored more
combustion engines and other renewable units such as
practical applications. According to the active policy rules
photovoltaic systems or hydro units. All types of technolo-
of the government of South Korea to develop eco-friendly
gies are not necessary for the formation of a microgrid [3].
microgrids with zero carbon emission, many of the diesel
When the microgrid operates as part of the utility system,
generators in stand-alone microgrids are replaced by clean
the microgrid sources feed the local loads under a prede-
energy sources. This poses challenges in the operation and
termined procedure. If the generated capacity exceeds the
control of these systems, as it causes the lack of inertia
power-demand level in the microgrid, additional energy is
originally provided from the diesel generators. A novel fre-
delivered to the grid and, if the microgrid cannot feed all
quency and voltage controller for this case was proposed,
its local loads, the required energy flows from the main
which was able to keep the frequency and voltage magni-
grid to the microgrid. When there is a problem with the
tude of the system constant [8]. For frequency control, a
utility (during major events, such as short circuits, voltage
recovery control loop was added to the conventional droop
breakdowns in the mains and general blackouts or when
method and inertia-control loops for the purposes of both
the power quality of the mains falls below certain stand-
effective power sharing and stabilization of the frequency
ards, such as voltage drops), the ‘separation tool’ of the
response after the occurrence of disturbances.
microgrid is opened and separates the sensitive loads from
Under normal conditions, the voltage and frequency
the main power network, so that the microgrid can operate
are precisely controlled by active and reactive power.
in islanded mode and provide uninterrupted power [4].
In an independent power system with wind and diesel
The microgrid must be able to maintain its stability and
power-generation units, frequency control seems to be
continue to operate after being disconnected from the net-
very sensitive because the system has low inertia. Also,
work. In this case, the required criteria for sensitive loads
wind power-generation units cannot actively participate
in the microgrid must also be met, which requires the use
in compensating for the increase in load demand be-
of measuring tools to control the frequency and voltage in
cause active power generation depends on wind speed.
the microgrid. The most important challenge in operating
Similarly, voltage control is very difficult because in add-
a microgrid is the control of its main parameters. So, the
ition to the reactive power demand by the system itself,
main purpose of control is to maintain the voltage and
the system also consumes reactive power. Therefore, the
frequency of the network within the allowable range and
reactive power sharing of the synchronous generator alone
to provide the required load power. Other purposes such
cannot be sufficient to meet the need for increased re-
as power quality, reliability or appropriate power sharing
active power. So, in such cases, the voltage may fluctuate
may also be considered. For better control, scattered prod-
sharply. A static volt-ampere reactive compensator (SVC)
ucts are connected to the microgrid network through the
is used to prevent larger voltage fluctuations at the point
inverter and therefore the main purpose is to control the
of common connection. A small imbalance between active
inverters.
power generation and load causes frequency deviation and
As mentioned earlier, the most important challenge in
a small imbalance between reactive power generation and
operating microgrids is the control issue. Various methods
load causes voltage deviations. The excitation system in
have been proposed for this challenge in recent decades.
the synchronous generator operates much faster with a
The plug-and-play nature of distributed generation (DG)
small time constant compared to the governor and the ini-
units were used [5]. The operation of microgrids is always
tial excitation control. Hence, the effect of excitation loop
associated with challenges mainly caused by the time-
control for voltage control is not considered [9, 10].
varying microgrid structure. In this paper, a plug-and-play
In the reference paper [11], a structure consisting of
decentralized voltage control for DC microgrids was pro-
renewable energies was considered and the active and
posed. This control method ensured stable and satisfac-
reactive power transactions in the system were opti-
tory performance of the microgrids under the arbitrary
mized. In this article, different reactive power-control
interconnection of DG units.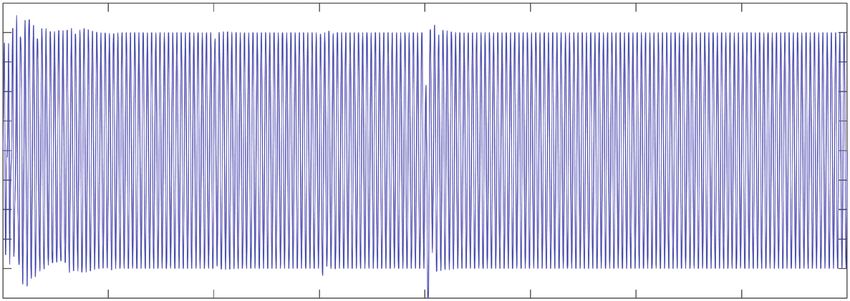
872 | Clean Energy, 2022, Vol. 6, No. 1
devices have been studied and compared. The paper [12] a proportional–integral–derivative (PID) controller in the
also presented a model-independent approach by the presence of a wind turbine and photovoltaics (PV) [5].
use of an SVC to improve dynamic behaviour. Reference In this work, considering the issues raised, the bene-
[13] also suggested a method for optimally adjusting SVC ficial effect of the excitation loop for effective frequency
parameters in an island microgrid. In this paper, a multi- control has been identified. The study for the single ma-
objective optimization was used and the system control chine infinite bus system was performed with four large
was multilevel. In reference [14], a different AC and DC SGs that delivered power to the infinite bus via a long
structure was considered for the microgrid and the ad- transmission line. The effect of a frequency-control loop
vantages of using a hybrid converter in series with an SVC and a voltage-control loop on each other for a separate
were examined. Focusing on the problem of voltage rise, diesel–wind system was investigated. Both the frequency-
reference [15] has proposed a way to control the source and voltage-control loops are optimized simultaneously.
side to avoid this. A linear model of the hybrid system has also been devel-
References [16] and [17] have proposed a control method oped. Dynamic frequency response and voltage deviations
based on reactive power compensation. Reference [17] was are compared for different load disturbances and different
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
based on SVC equipment. In this reference, the parameters reactive loads. The gains of the SG and SVC controllers in
of the SVC were optimized. the IG terminal are calculated using the BWO algorithm
The methods presented in the articles evaluate or op- with the goal of low frequency and voltage deviations.
timize a specific component of the system. In this paper, The results showed that this algorithm has appeared suc-
a newer Black Widow Optimization (BWO) algorithm is cessful in terms of speed and accuracy.
used with a similar approach to reference [17], but the
frequency-control loop and the voltage loop are optimized
simultaneously. The BWO algorithm is one of the novel 1 Materials and method
search algorithms that is used due to its simplicity of im-
plementation due to the lack of parameters that need to 1.1 Problem formulation
be quantified. Reference [18] has used this algorithm for The schematic of the system under consideration is shown
optimal allocation of DG in a distribution system and ref- in Fig. 1. As shown in Fig. 1, the load is fed by a stand-alone
erence [19] has used this algorithm for the estimation of hybrid system. This system includes a diesel synchronous
synchronous generator parameters. This algorithm was generator and a wind turbine with a speed squirrel cage
not used for controlling SVC equipment and optimizing induction generator.
control loops. In our recent research, we demonstrated An SVC is used to control voltage fluctuations. This
optimal load frequency control of island microgrids via equipment is located at the point of common coupling.
V
Wind
Pig
Induction
Gear box
generator Qig
Turbine blades
PL
SVC QL LOAD
QSVC
Psg
Synchronous
FUEL generator Qsg
Fig. 1: Schematic diagram of a hybrid power system.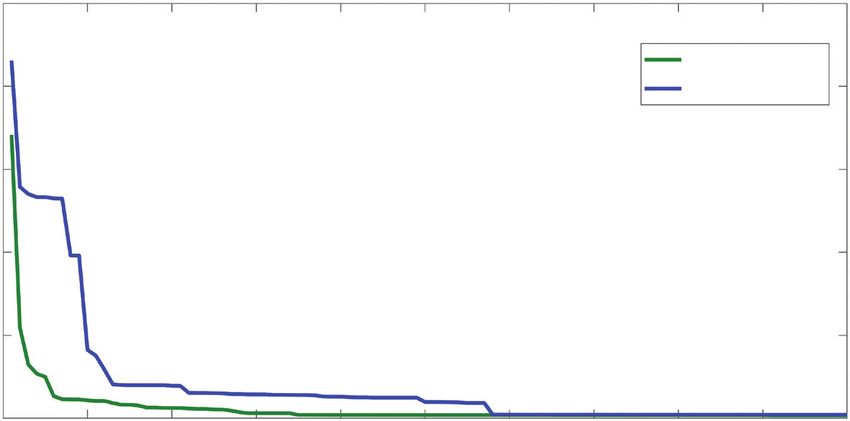
Sadeghi et al. | 873
The reason for choosing this equipment is the relationship combined in this schematic. The constants of the voltage-
between reactive power and voltage. control loop are taken from [16] and [17]. In transient con-
Fig. 2 shows the block diagram of the system shown ditions, the reactive power of the synchronous generator
in Fig. 1. Frequency- and voltage-control structures are is as follows:
1/Rd
–
KD (1+sTD1)/(1+sTD2) 1/(1+sTD3) 1/(1+sTD4)
KDP + KDI/s
–
∆PM,SG
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
+
+ –
+ ∆λ
1/(1+sTW) KIG Kp/(1+sTp) 2pi 1/s
∆PIW +
– – ∆Pe
KDP +
From ∆λ Ps
+
+
∆Vref KR/(1+sTR) Ka/(1+sTa) 1/(1+sTd) K9
– KE,V
∆PIG
– +
∆V + + ∆QSVC
Kv/(1+sTv)
–
+
∆QIG
K5
K8
∆Eq + +
1/(1+sTG) K3 K4
–
+
+
K2 K1
KλQ
–
From ∆λ
Kλ
SF
From ∆λ
sKF/(1+sTFF)
– –
–
KA/(1+sTA) 1/(KE+sTE)
+
+
∆Vref
Fig. 2: System diagram block.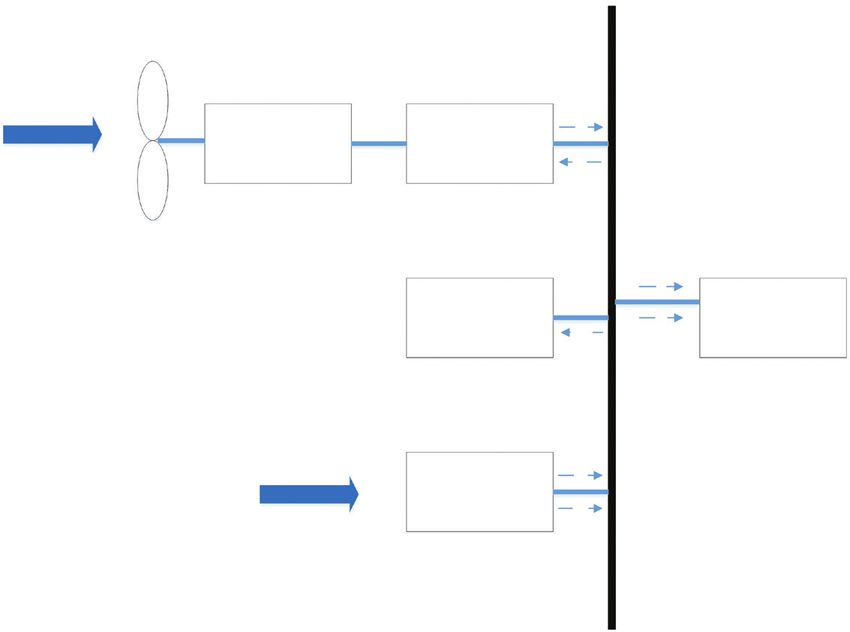
874 | Clean Energy, 2022, Vol. 6, No. 1
QSG = (E'q V cos δ − V2 )/X'd
(1) modes and perturbation vectors for the system without
and with coordinated control are given in Equations (11)
where QSG is the synchronous generator reactive power,
and (12) as:
E' q is the internal armature electromagnetic field (EMF) for
the round rotor synchronous machine, V is the terminal
Ẋ = AX + Bu + CΓ
Ẋ = [ ∆ f ∆ δ ∆ PI ∆ LL ∆ T T
voltage, δ is the power angle of the synchronous generator D3 ∆ PGD ∆ FTS ]
(11)
and X' d is the reactance of the synchronous machine.
u = [ ∆ Pref ]
T
For small deviations, Equation (1) can be written as Γ = [ ∆ PL ∆ PIW ]
follows:
Å ã Å ' ã Å ' ã
Ẋ = [ ∆ Efd ∆ Va ∆ Vf ∆ E' q Bsvc B' svc ∆ α ∆ V . . .
V cos δ E q cos δ − 2V E q sin δ
∆ f ∆ δ ∆ PI ∆ LL ∆ T T
D3 ∆ PGD ∆ FTS ]
'
∆QSG = ∆E q + ∆V − ∆δ
X' d X' d X' d
(2)
u = [ ∆ Vref ∆ Pref ]
T
where ∆E' q is the deviation in the EMF that is proportional Γ = [ ∆ QL ∆ PL ∆ PIW ]
(12)
to the change in the direct-axis field flux in transient con-
In Equation (12), the X mode vector is displayed for SVC
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
ditions, ΔV is the terminal voltage deviation and Δδ is the
synchronous generator power angle deviation. type 1 and modified for the other two types of SVC. It is
Taking the Laplace transform from both sides, Equation shown in Fig. 3. Time domain responses shown in Fig. 2 are
(3) is obtained as: obtained using different types of perturbations. The ob-
jectives are to control the frequency deviation and voltage
∆QSG (S) = K1 ∆E' q (s) + K2 ∆V (s) − Kδ ∆δ
(3) of the system after exposure to changes in active and re-
active power demand. Optimized transient responses for
K1 = V Xcos
'
δ
'
d
E cos δ−2V
deviations of frequency and voltage are achieved by opti-
K2 = q X' d
(4) mizing the proportional–integral (PI) controller coefficients
K = E' q sin δ
δ X' d in both the load frequency-control loop and the SVC gains.
To minimize the undershoot (US), overshoot (OS) and set-
The EMF for a synchronous machine is given in Equation
tling time (ST) in transient responses of frequency and
(5) and its modification by a small disturbance is given in
voltage, the objective function is defined as the Demerit
Equation (6):
Å ã Å ã (FDM) form in Equation (13). The optimal set of parameters
Xd Xd − X' d varies according to the type of SVC. For SVC types 1, 2 and
(5) Eq = E' q − V cos δ
Xd
' Xd'
3, they are equal to [ kDP KDI KR TR ], [kDP KDI KR T1 T2 T3 T4 ],
Å ã Å ã Å ã [kDP KDI KPsvc KIsvc ].The minimization of the objective func-
Xd Xd − X' d Xd − X' d
∆Eq = ∆E' q − cos δ∆V + V sin δ∆δ tion is defined in different ways by Equation (13):
X' d X' d X' d
(6) N î
Σ ó
2
where ΔEq is the deviation in the EMF proportional to the FD =
∆ f (n) ∆ t
n=0
change in the direct-axis field flux under steady-state con- (13) N î ó
Σ 2 2
ditions for a synchronous rotor. FDM = ∆ f (n) + ∆ V(n) ∆ t
n=0
The coupling flux equation for the small disturbance is
where Δf and ΔV are defined as the frequency and voltage
presented as follows:
deviations, N is the total number of samples for the voltage
d ∆Efd − ∆Eq and frequency responses and Δt is the time interval be-
(7)
(∆E' q ) =
dt T' d0 tween samples. In addition to the mentioned objective
where T' d0 is the transient temporal constant of the direct function above, the constraints on power generation are
axis of the open circuit. added as follows:
v,min v,max
1 [ ] (14)
δi vi 2 bi ≤ Qi v ≤ δi vi 2 bi
∆E' q =
(8) K1 ∆Efd (s) + K2 ∆V(s) − Kδ ∆δ(s)
1 + sTG
Therefore, both of the target functions in Equation (14) will
where be optimized using the BWO algorithm.
X' T'
TG = d d0
(9)
Xd
1.3 Solution method
'
k = Xd
1 ÄXd
' ä
The objective function obtained in the previous section is
k2 = Xd − XXdd ∗ cos δ
(10) optimized to obtain the appropriate values of voltage and
Ä ä
k = X − X' d ∗ V sin δ frequency controllers. The purpose of this optimization is
δ d Xd
to minimize voltage and frequency fluctuations. The sim-
ultaneous voltage- and frequency-control block diagram
1.2 Providing systems state space equations shown in Fig. 2 is also obtained according to the mathem-
and optimization formulation atical relations of the previous section. After optimization,
For the system shown in Fig. 2, the equations of state appropriate values of controllers are placed in these con-
space are written as Equations (11) and (12). The input trol loops and the results are analysed.Sadeghi et al. | 875
∆V(s)
Regulator Thyristor firing delay Phase sequence delay
–
+
∆Vref (s) KR/(1+sTR) (Ka+1)/sTa 1/(1+sTd) Type - 1
∆V(s)
Lead - Lag Thyristor firing Phase sequence delay
delay
–
+
∆Vref (s) KR (1+sT1)/(1+sT3) (1+sT2)/(1+sT3) Ka/(1+sTa) 1/(1+sTd) Type - 2
∆V(s)
Regulator Thyristor firing delay Phase sequence delay
–
+
∆Vref (s)
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
Kp + KI/s Ka/(1+sTa) 1/(1+sTd) Type - 3
Fig. 3: SVC types 1, 2 and 3 for small-signal analysis.
Nowadays, meta-heuristic algorithms play a vital role
in the approximate solution of optimization problems. Start
These methods are based on searching in the sample an- Randomly
select parents
swer space in order to minimize the objective function.
This is done by obtaining the main quantities of the ob-
Generate initial population
jective function in order to minimize the dependent quan- (random power flows) Procreate
tities. Choosing the right algorithm for different problems
is important so that an algorithm for one type of problem
can be suitable and at the same time unsuitable for other Evaluate the fitness of individuals by Cannibalism
problems. calculating equations mentioned in ( )
The Black Widow spider is usually a nightly insect. The
female spider stays in the dark away from sight during the YES NO Mutation
End Stop condition
daytime and during the night spins the web. Actually, the
female spider lives in the same place for most of her life.
Update
When the female spider tries to mate, it marks some cer-
population
tain spots of her net to send signals to the male spider. The
first male spider that enters the web renders the female’s
Fig. 4: Flowchart of the BWO algorithm in the proposed problem.
web less attractive to rivals by web reduction. The female
spider consumes the male during or after mating and then
Table 1: Parameters of algorithms
transfers eggs to the egg sac. After the eggs hatch, the off-
spring engage in sibling cannibalism. But they stay on Black Widow
their mother’s web for a short period of time and they may Cuckoo search algorithm Optimization algorithm
even consume the mother spider. This cycle continues and parameters parameters
leads to the survival of the fittest. The best one will be the
The number of eggs = random Procreating rate = 0.6
global optimum of the objective function. number between 5 and 20
The flowchart of the algorithm used to solve the Population = 20 Cannibalism rate = 0.44
problem is shown in Fig. 4. Allowable spawning dis- Mutation rate = 0.4
In the BWO algorithm used in this work, there are some tance = random number
parameters that must be quantified and are essential for between 5 and 20
better results. These parameters are procreating rate, can- Rate of egg loss = 10% Population = 20
nibalism rate and mutation rate [20]. The parameters of Grouping parameter K-means = 4
this algorithm are shown in Table 1. The parameters of diversion: λ = 1
and θ = random
The Cuckoo algorithm is another method used in this
paper. It was inspired by the obligate brood parasitism of
some cuckoo species by laying their eggs in the nests of to replace a worse one in the nest. This algorithm has been
host birds of other species. If a host bird finds out that the used in optimizing the SVC parameters in reference [17].
eggs are not theirs, it will either throw these eggs away or The parameters that must be set in this algorithm are
abandon its nest and build a new one elsewhere. Each egg the upper and lower limit of the allowed eggs, the max-
represents a solution. The goal is to use the better solutions imum allowable spawning distance, the number of eggs876 | Clean Energy, 2022, Vol. 6, No. 1
lost in each iteration, the grouping parameter K-means Diesel and wind power-generation units produce power
and the parameters of diversion. commensurate with the average consumption. In this re-
The parameters of this algorithm are shown in Table 1. search, an attempt has been made to discover the effect
Proper adjustment of parameters has a significant impact of voltage control by controlling SVC units located in the
on the results in both algorithms. Attempts have been made terminal of wind power-generation units on frequency
to consider the best of these parameters. Also, the initial control. Case studies have been proposed by simulations
population is assumed to be the same for both algorithms. to determine the usefulness of integrated voltage control
for frequency control. To investigate this effect, two control
scenarios are considered without and with optimal tuning
1.4 Optimized parameters of the SVC.
In the previous section, the system under study was de-
scribed. The goal is optimal control over frequency and
voltage. The system parameters obtained by the BWO al- 2 Results
gorithm are shown in Table 2. The PI controller is used in The simulation results are displayed below. Scenarios are
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
the frequency-control loop and the SVC is used to control applied to the system according to Table 3.
the voltage loop. The optimization diagram of the BWO al-
gorithm is also shown in Fig. 5.
As can be seen from Fig. 5, the target functions in both 2.1 Simulation results in the optimal tuning
algorithms have changed slightly after about the 20th it- mode of the frequency-control loop without
eration. Therefore, the number of repetitions of 100, after optimal tuning of the SVC
which the change of the cost function becomes 0.05. Also, the ST in this case is ~0.3 seconds. The moment
the system starts also experiences a long ST.
Gains of PI con- Gains of SVC in voltage-control loop
troller on fre-
quency loop SVC Type 1 SVC Type 2 SVC Type 3
2.2 Simulation results in the optimal tuning
KDP = 266.34 KR = 590 KR = 6250 KPsvc = 567 mode of the frequency-control loop and with
KDI = 12.6 TR = 0.04 T1 = T2 = 1.12 s KIsvc = 22 600 optimal tuning of the SVC
KDP = 198.56 T3 = T4 = 3.8 s KDP = 198
Upon application of step-load perturbation of the active
KDI = 12.5 KDP = 187 KDI = 13.87
power load, the terminal voltage also deviates. The devi-
KDI = 14
ation in the terminal voltage has been compensated for by
25
BWO Algorithm
20 Cuckoo Algorithm
15
Cost
10
5
0
0 10 20 30 40 50 60 70 80 90 100
Iteration
Fig. 5: Optimization diagram of the problem under study by the Cuckoo and BWO algorithms.Sadeghi et al. | 877
Table 3: Scenarios applied to the system the additional reactive power generation of both the syn-
chronous generator and the SVC. The SVC type 3 leads to
Scenario Seconds (s)
less voltage deviation and, as can be seen in Fig. 9, removes
Starting system 0 the steady-state error deviations with the integral controller
5% increase in active load 0.5 actions. The next two types also show better performance
15% increase in active load and 5% reactive load 1 than the lack of this equipment but, compared to SVC
10% load reduction 1.5 type 3, they have poorer performance in transient and per-
Single-phase short-circuit error 2 manent modes, are left with a small steady-state error in the
50.25
50.2
Frequency (Hz)
50.15
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
50.1
50.05
50
49.95
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
Fig. 6: System frequency in the optimal setting mode of the frequency-control loop without optimal SVC adjustment.
500
450
400
350
Voltage (V)
300
250
200
150
100
50
0
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
Fig. 7: System voltage in the optimal setting mode of the frequency-control loop without optimal SVC adjustment.
500
400
300
200
Voltage (V)
100
0
–100
–200
–300
–400
–500
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
Fig. 8: System voltage in the optimal setting mode of the frequency-control loop without optimal SVC adjustment.878 | Clean Energy, 2022, Vol. 6, No. 1
A 400
SVC TYPE 1
SVC TYPE 2
300 SVC TYPE 3
200
Delta f (pu)
100
0
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
–100
–200
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
B 1.5
SVC TYPE 1
SVC TYPE 2
SVC TYPE 3
1
Delta f (pu)
0.5
0
–0.5
–1
3 3.01 3.02 3.03 3.04 3.05 3.06 3.07 3.08 3.09 3.1
Time (s)
Fig. 9: Frequency changes in the use of three types of SVC. (a) General state, (b) permanent state.
voltage deviation and are comparatively slower to suppress result, this synchronized control between voltage and fre-
the voltage deviation. The same results have been obtained quency results in better operation from the perspective
with the use of an SVC in [17]. However, a different solution of overvoltage and subsidence, as well as a better ST in
method has been adopted in the mentioned reference. the system, and the system converges more quickly to the
The following results have been performed in the nominal value of its parameters.
case of using a type 3 SVC. For this case, as can be seen By comparing Figs 6 and 10 in order to compare the fre-
from Figs 10–12, the amount of perturbation due to load quency results and Figs 7 and 11 in order to compare the
and error changes has been greatly improved compared voltage results, an improvement in the results can be seen
to the previous case. For example, in the last scenario by using the optimal SVC. At 2nd time when a single-phase
in which an error is applied to the system, the ST of the short-circuit fault occurs, without optimal SVC, the over-
frequency is ~0.1 seconds and the maximum overload shoot rate is up to 50.06 and the undershoot rate is 49.95.
is 0.04. System start-up has also been greatly improved. The ST is also 0.24 seconds. These values have decreased
This performance improvement in system voltage is relatively well in the case of using an SVC optimized using
also evident. the BWO algorithm. In this case, the amount of overshoot
As can be seen from the results, in the case of sim- is 50.04 and the amount of undershoot is 49.96. Also, the ST
ultaneous frequency control and SVC, the system per- is 0.16 seconds. Overall, a 22% improvement was seen on
forms better. This also applies to the relationship between average in the STs with the use of an optimal SVC. Also, an
parameters in complex systems such as microgrids. As a 18% improvement was observed in the transitory values.Sadeghi et al. | 879
50.25
50.2
Frequency (Hz) 50.15
50.1
50.05
50
49.95
49.9
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
Fig. 10: System frequency in the optimal setting mode of the frequency-control loop and with the optimal adjustment of the SVC.
500
450
400
350
300
Voltage (V)
250
200
150
100
50
0
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
Fig. 11: System voltage in the optimal setting mode of the frequency-control loop and with the optimal adjustment of the SVC.
600
400
200
Voltage (V)
0
–200
–400
–600
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
Fig. 12: System voltage in the optimal setting mode of the frequency-control loop and with the optimal adjustment of the SVC.
2.3 Comparison of simulation results using the discovery in the operation of these algorithms. Features of
BWO algorithm and Cuckoo search this algorithm include easy set-up and implementation. Also,
In this study, the BWO algorithm was used and proposed for in terms of the results and performance speed, as it turned
the problems. The BWO algorithm is one of the two-stage out, it showed good performance. There are other classes
heuristic algorithms. There are two stages of search and of optimization algorithms in which the search method is880 | Clean Energy, 2022, Vol. 6, No. 1
50.25
50.2
Cuckoo Algorithm
BWO Algorithm
50.15
Frequency (Hz)
50.1
50.05
50
49.95
49.9
0 0.5 1 1.5 2 2.5 3 3.5 4
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
Time (s)
Fig. 13: System frequency in using the BWO algorithm and Cuckoo search.
500
450
400
350
BWO Algorithm
300
Voltage (V)
Cuckoo Algorithm
250
200
150
100
50
0
0 0.5 1 1.5 2 2.5 3 3.5 4
Time (s)
Fig. 14: System voltage using the BWO algorithm and Cuckoo search.
Table 4: Comparative results between algorithms frequency control. The results are shown in Figs 13 and
14. As the figures show, the BWO algorithm has been
Cuckoo
able to achieve better results in voltage and frequency
search BWO
algorithm algorithm control.
As shown in Figs 13 and 14, in the scenarios applied to
Maximum overshoot in 50.07 50.04 the system, the BWO algorithm was able to perform better
frequency (Hz) than the Cuckoo algorithm. The effect of this improve-
Minimum undershoot in 49.91 49.96
ment is better reflected in the ST. This performance is
frequency(Hz)
manifested in better control of the transient state created
Maximum overshoot in 412 405
in perturbations. The BWO algorithm has improved the ST
voltage (V)
Minimum undershoot in 349 364 by ~12% in different scenarios. It has also improved the
voltage (V) overshoot and undershoot of the system by ~12%, except
Maximum settling time (s) 0.3 0.16 at the moment of start-up. In this way, the ST and over-
Speed up to 90% of the 79 43 shoots of the system are better controlled and the settling
final answer (s) time is shorter. Also, as shown in Fig. 5, the optimization
diagram has a good speed. What is certain is that the BWO
continuous. Among these algorithms, we can mention the algorithm was able to optimize the target function well if
Cuckoo algorithm [21]. In conclusion, a comparison is made it reaches close to 95% of the optimal target function after
between these two algorithms with different functions. the 20th iteration. Comparative results between these two
The results of the two algorithms are compared methods according to the applied scenarios can be seen
with each other in terms of coordinated voltage and in Table 4.Sadeghi et al. | 881
3 Conclusion References
The BWO optimization algorithm is one of the newest [1] Shafaghatian N, Kiani A, Taheri N, et al. Damping controller
and most powerful optimization methods ever intro- design based on FO-PID-EMA in VSC HVDC system to im-
prove stability of hybrid power system. Journal of Central South
duced. The DG system is a hybrid power one that includes
University, 2020, 27:403–417.
wind–diesel power generation based on induction and
[2] Alayi R, Mohkam M, Seyednouri SR, et al. Energy/economic
SGs. In this research, the dynamic frequency response analysis and optimization of on-grid photovoltaic system
and voltage deviation for active load disturbances and using CPSO algorithm. Sustainability, 2021, 13:12420.
different reactive loads were compared. The gain of the [3] Alayi R, Zishan F, Mohkam M, et al. A sustainable energy distri-
SG and SVC controllers in the IG terminal was optimized bution configuration for microgrids integrated to the national
using the BWO algorithm to cause low frequency and grid using back-to-back converters in a renewable power
system. Electronics, 2021, 10:1826.
voltage deviation. The results were compared with the
[4] Sadabadi MS. Line-independent plug-and-play voltage stabil-
Cuckoo algorithm. These results indicated the optimal
ization and ℒ2 gain performance of DC microgrids. IEEE Control
performance of the BWO algorithm. Also, due to the pos- Systems Letters, 2020, 5:1609–1614.
sibility of using the methods in online terms, the simula-
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022
[5] Alayi R, Zishan F, Seyednouri SR, et al. Optimal load frequency
tion time was considered as an important factor that the control of island microgrids via a PID controller in the pres-
BWO algorithm had an acceptable simulation time in this ence of wind turbine and PV. Sustainability, 2021, 13:10728.
research. [6] Alayi R, Harasii H, Pourderogar H. Modeling and optimization
of photovoltaic cells with GA algorithm. Journal of Robotics and
The results showed that the BWO algorithm reached
Control, 2021, 2:35–41.
95% of its final value after ~20 iterations and therefore has
[7] Joung KW, Kim T, Park JW. Decoupled frequency and voltage
good speed in finding the optimal answer. Also, in different control for stand-alone microgrid with high renewable penetra-
scenarios, a 12% improvement in the ST and overshoots tion. IEEE Transactions on Industry Applications, 2018, 55:122–133.
and undershoots was observed compared to the older [8] Liu B, Wu T, Liu Z, et al. A small-AC-signal injection-based de-
Cuckoo algorithm. Therefore, the dynamic behaviour of centralized secondary frequency control for droop-controlled
the system was improved by the proposed method. islanded microgrids. IEEE Transactions on Power Electronics,
2020, 35:11634–11651.
[9] Ghosh S, Chattopadhyay S. Three-loop-based universal con-
trol architecture for decentralized operation of multiple in-
Conflict of interest statement verters in an autonomous grid-interactive microgrid. IEEE
The authors declare that there is no conflict of interest. Transactions on Industry Applications, 2020, 56:1966–1979.
[10] Shafaghatian N, Heidary A, Radmanesh H, et al. Microgrids
interconnection to upstream AC grid using a dual-function
fault current limiter and power flow controller: principle and
Data availability test results. IET Energy Systems Integration, 2019, 1:269–275.
All data used to support the findings of this study are included [11] Qi J, Zhao W, Bian X. Comparative study of SVC and STATCOM
within the article. reactive power compensation for prosumer microgrids
with DFIG-based wind farm integration. IEEE Access, 2020,
8:209878–209885.
Funding [12] Ma Z, Wang Z, Guo Y, et al. Nonlinear multiple models adap-
tive secondary voltage control of microgrids. IEEE Transactions
This article no funding by any organization. on Smart Grid, 2020, 12:227–238.
[13] Yang X, Du Y, Su J, et al. An optimal secondary voltage control
strategy for an islanded multibus microgrid. IEEE Journal of
Appendix 1 Emerging and Selected Topics in Power Electronics, 2016, 4:1236–1246.
Ratings and data of the typical system studied [14] Wang L, Fu X, Wong MC. Operation and control of a hybrid
coupled interlinking converter for hybrid AC/low voltage DC
Generation Capacity (kW) Load (kW) microgrids. IEEE Transactions on Industrial Electronics, 2020,
68:7104–7114.
Wind 150 150
Diesel 150 100
[15] Carvalho PM, Correia PF, Ferreira LA. Distributed reactive
Total 300 250 power generation control for voltage rise mitigation in dis-
tribution networks. IEEE Transactions on Power Systems, 2008,
23:766–772.
System parameters
[16] dos Santos Neto PJ, dos Santos Barros TA, Silveira JP, et al.
Xd = 1.0 Td = 0.02/ Power management strategy based on virtual inertia for
K1 = 0.15 TF = 0.715 s T' d0 = 5.0 s perunit (p.u.) 12 s DC microgrids. IEEE Transactions on Power Electronics, 2020,
35:12472–12485.
K2 = 0.7932 TA = 0.05 s KF = 0.5 X' d = 0.15 p.u. TE = 0.55 s [17] Mehta P, Bhatt P, Pandya V. Optimized coordinated control
K3 = 6.22143 RY = 4.06415 TR = 0.05 s KA = 40.0 KE = 1.0
of frequency and voltage for distributed generating system
p.u.
using Cuckoo Search Algorithm. Ain Shams Engineering Journal,
Eq = 1.1136 p.u. XR = 1.0/0 BSVC = 0.73 KR = 337.0 Xeq = 1.12 p.u.
2018, 9:1855–1864.
p.u.
E' q = 0.9603 p.u. δ = 21.050 Tα = 0.02/4 s QL = 0.75 p.u. α = 2.443985 [18] Samal P, Mohanty S, Patel R, et al. Optimal allocation of distrib-
uted generation in distribution system by using black widow882 | Clean Energy, 2022, Vol. 6, No. 1
optimization algorithm. In: 2021 2nd International Conference [20] Hayyolalam V, Kazem AA. Black widow optimization algo-
for Emerging Technology (INCET), Belagavi, India, 21–23 May rithm: a novel meta-heuristic approach for solving engin-
2021, 1–5. eering optimization problems. Engineering Applications of
[19] Micev M, Ćalasan M, Petrović DS, et al. Field current waveform- Artificial Intelligence, 2020, 87:103249.
based method for estimation of synchronous generator [21] Yang XS, Deb S. Cuckoo search via Lévy flights. In: 2009
parameters using adaptive black widow optimization algo- World Congress on Nature & Biologically Inspired Computing
rithm. IEEE Access, 2020, 8:207537–207550. (NaBIC), Coimbatore, India, 9–11 December 2009, 210–214.
Downloaded from https://academic.oup.com/ce/article/6/1/869/6484892 by guest on 18 January 2022You can also read