OpenECU Developer Software Installation and Release Note - Release 3.1.0-FS r2021-1
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
®
OpenECU Developer Software
Installation and Release Note
Release 3.1.0-FS r2021-1
Copyright © 2020 Pi Innovo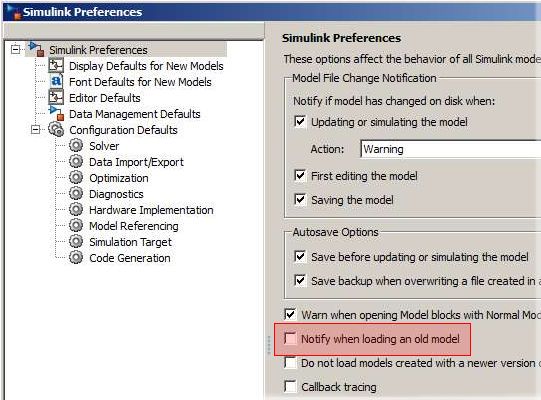
Table of Contents
1. Release details ...................................................................................................... 1
1.1. Introduction ................................................................................................. 1
1.2. Summary of releases ................................................................................... 1
2. Installation ............................................................................................................. 6
2.1. Introduction ................................................................................................. 6
2.1.1. Third party tool requirements ............................................................. 6
2.1.2. Third party tool requirements — C-API ............................................... 6
2.1.3. Third party tool requirements — Simulink-API ..................................... 6
2.1.4. Third party tool requirements — installation ........................................ 7
2.1.5. Third party tool requirements — compatibility ...................................... 8
2.2. Installing OpenECU ................................................................................... 10
2.3. License setup ............................................................................................ 18
2.3.1. Floating license ............................................................................... 18
2.3.2. Node-locked license ........................................................................ 19
2.4. Removing OpenECU ................................................................................. 20
2.5. Integration notes for third party tools ........................................................... 21
2.5.1. Microsoft Windows 10 ..................................................................... 21
2.5.2. MATLAB ......................................................................................... 21
2.5.3. PiSnoop ......................................................................................... 22
2.5.4. ATI Vision ...................................................................................... 22
2.5.5. ETAS INCA calibration tool .............................................................. 23
2.5.6. Vector CANape ............................................................................... 24
2.5.7. Wind River (Diab) C Compiler v5.9.4.8 ............................................. 24
2.5.8. Python ............................................................................................ 25
3. Change log .......................................................................................................... 26
3.1. Feature sets .............................................................................................. 26
3.2. Version numbering ..................................................................................... 26
3.3. Product marked as deprecated or end-of-life ............................................... 27
3.3.1. Deprecated items ............................................................................ 27
3.3.2. End-of-life items .............................................................................. 29
A. Contact information .............................................................................................. 94
Copyright 2020, Pi Innovo ii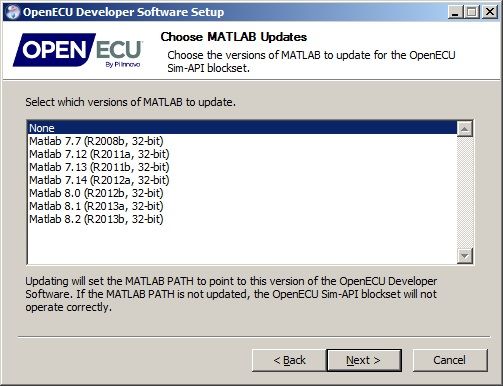
Chapter 1. Release details
1.1. Introduction ......................................................................................................... 1
1.2. Summary of releases ........................................................................................... 1
This document details generic release version 3.1.0-FS r2021-1 of the OpenECU developer
software and related tools, created on 31-Mar-2021. Some changes may not be backwards
compatible with older versions; please review the release notes to determine if there are
enhancements, bugs, or compatibility considerations in this release that impact you.
1.1. Introduction
This document is split into sections which detail how to install OpenECU, integrate OpenECU
with supporting tools, what changes have been made to OpenECU software, and how to
contact OpenECU technical support.
• Procedural steps to install the OpenECU software are given in the Installation section.
Review the installation steps to become familiar with the options available when OpenECU
is installed. In some cases, it is beneficial to have installed other packages before
OpenECU but this is not essential. Integration with other software packages is described
next.
• Integration with various third party applications supplied by other companies are detailed
in the Third party tools requirements and Integration notes for third party tools section.
Review the integration notes to become familiar with what tools OpenECU requires and
how OpenECU integrates and uses these tools. In some cases, you must change the
environment or tools before using OpenECU.
• A detailed change log to each release version of the OpenECU developer software is given
in the Change log section. A summary of each release is given in the Summary of releases
section.
Review the release notes to determine if there are enhancements, bugs, or compatibility
considerations in this release that impact you.
If you are upgrading from a software version other than the most recent one, review the
current release notes and all interim versions. For example, when you upgrade from v1.2
to v1.4, review the release notes for v1.3 and v1.4.
• A full User Guide and associated set of help files are installed as part of this install package
and can be accessed through Window's Start Menu, via an HTML browser or through the
MATLAB help browser.
• If you find an issue with OpenECU or require technical support, contact details can be
found in the Contact information section.
1.2. Summary of releases
This table provides quick access to what's new and changed in each version of OpenECU.
Release
The version, and sometimes name, assigned to the release. A
description of version numbering is given in the Version numbering
section.
Copyright 2020, Pi Innovo 1
Release details
New Features
New features introduced by this version, or significant changes to
existing features. New features are grouped into similar functional areas
making it easier to find related changes.
Fixes and Improvements
Fixes or improvements to existing features with details of why they were
previously wrong. As with new features, fixes and improvements are
similarily grouped into functional area.
Backwards compatible
Whether the changes in the release retain backwards compatibility
with the immediately prior release. If the release is not backwards
compatible, review the changes which affect backward compatibility to
determine if the release affects your application.
Firmware upgrade
Whether there is a change in the release which might require a firmware
upgrade. The firmware of the ECU makes up the boot, reprogramming
and, in some cases, other permanently resident functionality of the ECU.
If the release indicates the need for for a firmware upgrade, review the
changes which affect the firmware to determine if the new or changed
features affect you.
Table 1.1. Summary of releases
Release New features Fixes and improvements Backwards Firmware
compatible upgrade
3.1.0 Communications [33], Application programming No Yes
(r2021-1) Diagnostics interface [34],
(communications and fault Calibration [35],
handling) [33], Code generation [36],
Input/output Communications [38],
drivers [33], Diagnostics
Third party tool (communications and fault
support [33] handling) [39],
User
documentation [40],
Firmware (boot and
reprogramming) [39],
Target ECU [39],
Third party tool
support [40]
3.0.4 (build- Calibration [43] Code generation [43], Yes No
time-eval) User
documentation [44],
Examples [44],
Firmware (boot and
reprogramming) [44],
Target ECU [44]
3.0.3 No Target ECU [45] Yes Yes
(r2019-3)
3.0.2 No Firmware (boot and Yes Yes
(r2019-2) reprogramming) [46],
Target ECU [46]
3.0.1 No Application programming Yes No
(qca-1) interface [47]
Copyright 2020, Pi Innovo 2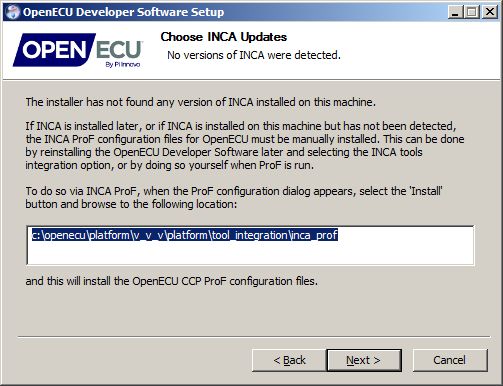
Release details
Release New features Fixes and improvements Backwards Firmware
compatible upgrade
3.0.1 No Communications [48] Yes No
(r2019-2)
3.0.0 (FS- Application programming Application programming No Yes
r2019-1) interface [49], interface [50],
Third party tool Calibration [50],
support [49] Code generation [50],
Communications [51],
Diagnostics
(communications and fault
handling) [52],
User
documentation [55],
Firmware (boot and
reprogramming) [53],
Target ECU [53],
Third party tool
support [54]
2.6.1 No Diagnostics Yes Yes
(m550-21) (communications and fault
handling) [55],
Non-volatile
storage [56]
2.6.1 No No Yes No
(m550-20)
2.6.1 No Communications [57] Yes No
(m550-19)
2.6.1 No Diagnostics Yes No
(m550-18) (communications and fault
handling) [57]
2.6.1 No Diagnostics Yes No
(m550-17) (communications and fault
handling) [58],
Non-volatile
storage [58]
2.6.1 Code generation [59] Diagnostics Yes Yes
(m550-16) (communications and fault
handling) [59],
Target ECU [59]
2.6.1 Firmware (boot and No Yes Yes
(m550-15) reprogramming) [60]
2.6.1 No No Yes No
(m550-14)
2.6.1 Firmware (boot and No Yes Yes
(m550-13) reprogramming) [61]
2.6.1 Diagnostics Code generation [64], No Yes
(m550-12) (communications and fault Communications [64],
handling) [62], Diagnostics
Firmware (boot and (communications and fault
reprogramming) [62], handling) [64],
Copyright 2020, Pi Innovo 3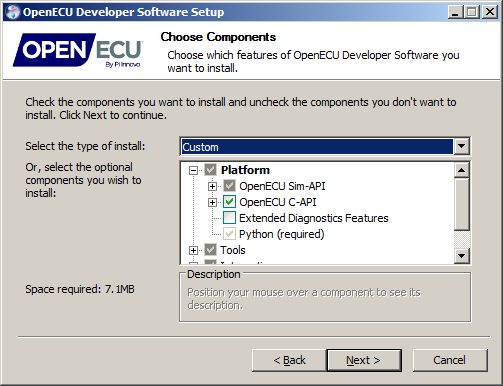
Release details
Release New features Fixes and improvements Backwards Firmware
compatible upgrade
Input/output Firmware (boot and
drivers [63], reprogramming) [65],
Real-time operating Input/output
system [63] drivers [65],
Real-time operating
system [66],
Target ECU [66],
Third party tool
support [67]
2.6.1 Input/output drivers [67] No Yes No
(m550-11)
2.6.1 Application programming Application programming No Yes
(m550-10) interface [68], interface [70],
Communications [68], Calibration [71],
Target ECU [69], Communications [71],
Third party tool Examples [72],
support [70] Input/output
drivers [72],
Target ECU [73]
2.6.1 Communications [73], No No Yes
(m550-9) Diagnostics
(communications and fault
handling) [75]
2.6.1 Target ECU [76] Application programming Yes Yes
(m550-8) interface [77],
Code generation [77],
Communications [77],
Input/output
drivers [77],
Non-volatile
storage [78]
2.6.1 Input/output drivers [79] Application programming Yes Yes
(m550-7) interface [79],
Calibration [79],
Diagnostics
(communications and fault
handling) [80],
Firmware (boot and
reprogramming) [80],
Target ECU [81]
2.6.1 Input/output Application programming Yes Yes
(m550-6) drivers [82], interface [82],
Target ECU [82] Diagnostics
(communications and fault
handling) [83],
Target ECU [83]
2.6.1 Non-volatile Calibration [84] Yes No
(m550-5) storage [84],
Target ECU [84]
2.6.1 No Firmware (boot and Yes Yes
(m550-4) reprogramming) [85],
Copyright 2020, Pi Innovo 4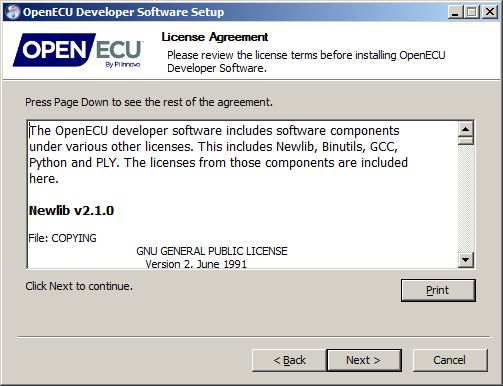
Release details
Release New features Fixes and improvements Backwards Firmware
compatible upgrade
Input/output
drivers [85],
Target ECU [86]
2.6.1 Input/output Calibration [87] Yes Yes
(m550-3) drivers [87],
Target ECU [87]
2.6.1 Calibration [88] Communications [89], Yes Yes
(m550-2) User
documentation [89],
Input/output
drivers [89],
Target ECU [89]
2.6.0 Application programming Communications [92] Yes Yes
(m550-1) interface [90],
Communications [91],
Target ECU [92]
Copyright 2020, Pi Innovo 5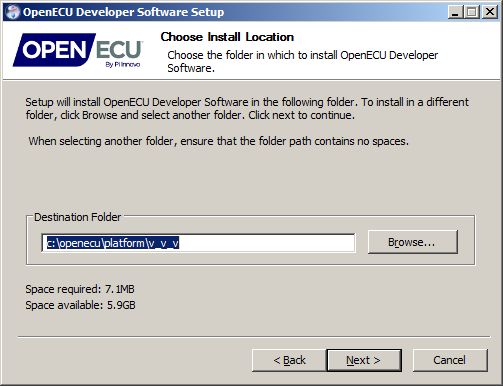
Chapter 2. Installation
2.1. Introduction ......................................................................................................... 6
2.1.1. Third party tool requirements ..................................................................... 6
2.1.2. Third party tool requirements — C-API ....................................................... 6
2.1.3. Third party tool requirements — Simulink-API ............................................. 6
2.1.4. Third party tool requirements — installation ................................................ 7
2.1.5. Third party tool requirements — compatibility ............................................. 8
2.2. Installing OpenECU ........................................................................................... 10
2.3. License setup .................................................................................................... 18
2.3.1. Floating license ....................................................................................... 18
2.3.2. Node-locked license ................................................................................ 19
2.4. Removing OpenECU ......................................................................................... 20
2.5. Integration notes for third party tools ................................................................... 21
2.5.1. Microsoft Windows 10 ............................................................................. 21
2.5.2. MATLAB ................................................................................................. 21
2.5.3. PiSnoop ................................................................................................. 22
2.5.4. ATI Vision .............................................................................................. 22
2.5.5. ETAS INCA calibration tool ..................................................................... 23
2.5.6. Vector CANape ....................................................................................... 24
2.5.7. Wind River (Diab) C Compiler v5.9.4.8 ..................................................... 24
2.5.8. Python .................................................................................................... 25
2.1. Introduction
This chapter describes the installation process for the OpenECU Simulink Blockset package,
C-API package, and its dependencies.
2.1.1. Third party tool requirements
OpenECU developer software has been tested to work with Windows 10.
2.1.2. Third party tool requirements — C-API
For C based development, OpenECU-FS requires one of the following compiler tools:
• Wind River Diab compiler
To program and calibrate an OpenECU with an application, OpenECU integrates with the
following calibration tools. Only one calibration tool is required:
• PiSnoop
• ATI VISION
• ETAS INCA
• Vector CANape
2.1.3. Third party tool requirements — Simulink-API
For Simulink model based development, OpenECU requires (at a minimum) the following
MathWorks tools:
• MATLAB (base product)
Copyright 2020, Pi Innovo 6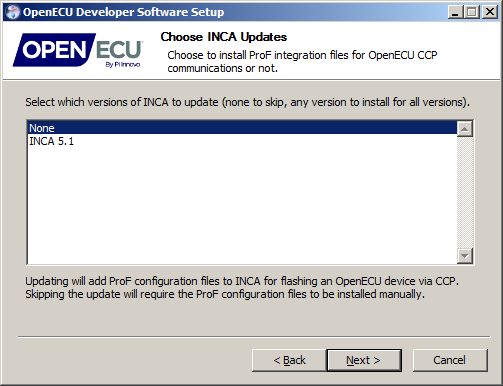
Installation
• Simulink (to develop the models)
• Simulink Coder (to generate C code from the models)
• MATLAB Coder (Simulink Coder depends on this)
In addition, if you need to add state diagrams to the model, then you will also need:
• Stateflow (to develop state flow diagrams inside your model) Simulink Coder generates C
code from the state flow diagrams inside your model.
Simulink Coder generates C code which does not lend itself to efficient repeatable testing.
When creating a production version of your product, you may need better control of the
structure of the C code generated from the model to reduce the cost of testing the C code
against any industry standards. Under these circumstances you will also need:
• Embedded Coder (to generate C code from the models)
To compile the generated C code (from either Simulink Coder or Embedded Coder), you will
need one of the following compilers:
• Wind River Diab compiler
To program and calibrate an OpenECU with an application, OpenECU integrates with the
following calibration tools. Only one calibration tool is required:
• PiSnoop
• ATI VISION
• ETAS INCA
• Vector CANape
2.1.4. Third party tool requirements — installation
OpenECU works with a number of applications (both required and optional) supplied by other
companies. If you intend to use OpenECU with one of the following tools, it is best to install
them before OpenECU. The installer will then integrate the OpenECU developer software
with these applications. See OpenECU Compatibility with Third Party Tools for a list of
supported versions.
• MATLAB
• ETAS INCA calibration tool
OpenECU works with a number of other applications, but these need not be installed prior
to the OpenECU developer software.
• Simulink Coder, formerly Real-Time Workshop, (optional)
• Embedded Coder, formerly Real-Time Workshop Embedded Coder, (optional):
• Stateflow
• Wind River (Diab) C compiler
• PiSnoop
• ATI Vision calibration tool
Copyright 2020, Pi Innovo 7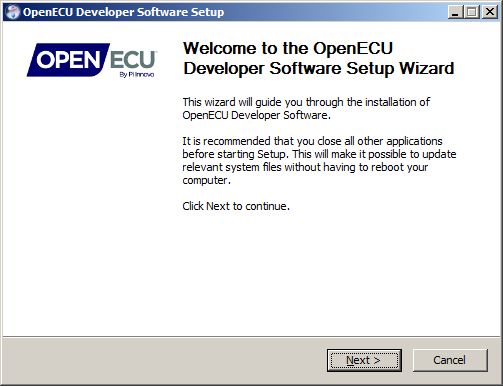
Installation
• Vector CANape calibration tool
2.1.5. Third party tool requirements — compatibility
OpenECU has been tested against the latest versions of each tool listed below. OpenECU
may work with other versions of these applications, but Pi only provides technical support
for the latest version.
Operating system
OpenECU works with the following operating systems.
• Microsoft Windows
Version License Installation and setup Troubleshooting
a
Win 10 Issued by Installation instructions provided No known issues
Microsoft by Microsoft.
No special setup required.
a
OpenECU developer software may not function correctly on encrypted drives. OpenECU developer software must be able to
create files on the host file system. If using an encrypted drive, be sure that permission settings will allow OpenECU to create
files. Pi Innovo cannot provide support for issues with encrypted drives.
Modeling tools
A modeling tool allows the user to diagrammatically describe their application logic and
control. That tool generates source code which OpenECU automatically builds into an
application using a compiler (next section). OpenECU supports the following modeling tools.
• Mathworks MATLAB/Simulink
Version License Installation and setup Troubleshooting
R2015a Issued by Installation instructions provided No known issues
(deprecated) Mathworks by Mathworks.
R2015b Setup requires MATLAB's
(deprecated) PATH variable to be adjusted,
32-bit which the OpenECU installer
can do for you, see OpenECU
R2015a
Developer Software Installation
(deprecated)
and Release Note.
R2015b
(deprecated)
R2016a
(deprecated)
R2016b
(deprecated)
R2017a
(deprecated)
R2017b
(deprecated)
R2018b
R2020a
64-bit
Note
Mathworks by default only gives the "latest" versions of its tools as downloads from
their website, which may not be the qualified version.
Copyright 2020, Pi Innovo 8Installation
Because of this, you will need to install MATLAB using a ISO image for [Rxxxx]. That
will install the General Release for [Rxxx] without any updates.
Once installed, you will then need to manually update to [Rxxxx] [specific update]
using the installation package on MathWorks.com Only a License Administrator can
download the ISO and the update files.
How do I download a MATLAB ISO archive?
mathworks.com/matlabcentral/answers/101103 [https://www.mathworks.com/
matlabcentral/answers/101103]
How can I download and install a MATLAB Update manually?
mathworks.com/matlabcentral/answers/456448 [https://www.mathworks.com/
matlabcentral/answers/456448]
Compilers
A compiler translates C source code (either written by hand or generated by a modeling tool)
into machine code that runs directly on the ECU.
All OpenECU targets use Freescale PowerPC microcontrollers. The M560 and M580
use an MPC5746C for the primary microcontroller and SPC560P34 for the secondary
microcontroller.
See the Technicical Specification for your target for more information.
• Wind River Diab compiler
Version License Installation and setup Troubleshooting
v5.9.4.8 Issued by Installation instructions provided Known Defects for Diab v5.9.4.8
Wind River by Wind River.
Setup requires the Window's
PATH environment variable to
be adjusted, or an OpenECU
specific environment variable
to be created, see Integration
notes for Diab v5.9.4.8.
Programming, Data Logging, and Calibration Tools
OpenECU requires a tool to program (or “Flash”) the ECU with the application code from
compilation. Once programmed, the ECU will execute the application. Interaction with the
executing application requires a data logging or calibration tool to read and write information
in the application.
These tools have been tested for reprogramming, data logging, and calibration capabilities.
Some of them have many other features which have not been tested with OpenECU.
• Pi Snoop
Version License Installation and setup Troubleshooting
Any Issued by Pi Installation instructions provided No known issues.
by Pi with the tool.
No special setup required.
• ATI Vision
Copyright 2020, Pi Innovo 9Installation
Version License Installation and setup Troubleshooting
v2.5 through Issued by Installation instructions provided OpenECU Developer Software
a
v6.0 ATI by ATI. Installation and Release Note,
“ATI Vision, Known defects”
The following Vision toolkits are
typically used when working
with OpenECU: Data Acquisition
Toolkit, Calibration Toolkit,
Universal ECU Interface
Standard Toolkit, APOLLO
Data Analysis Toolkit, CAN
Interface Toolkit and HORIZON
Scripting/Remote API Toolkit.
In particular, the HORIZON
Scripting/Remote API Toolkit is
required if OpenECU builds are
to generate Vision strategy files
(.vst).
a
The OpenECU method of configuring ATI Vision uses standardised ASAP2 files. As a result, all future versions of Vision are
expected to be backwardly compatible (e.g., version 3.7 and version 4.0 are known to be compatible).
• ETAS INCA
Version License Installation and setup Troubleshooting
v7.2.7 Issued by Installation instructions provided No known issues.
ETAS by ETAS.
Setup requires INCA to read
the ProF files for OpenECU
for reprogramming purposes,
which the OpenECU installer
can do for you, see OpenECU
Developer Software Installation
and Release Note.
• Vector CANape
Version License Installation and setup Troubleshooting
v8 through v17.0 Issued by Installation instructions provided No known issues.
Vector by Vector.
No special setup required.
2.2. Installing OpenECU
The installer program, openecu_platform_3_1_0_FS_r2021-1.exe, installs all the
necessary files for the OpenECU platform. This file can be obtained from the Pi Document
and Download Center web page [http://www.pi-innovo.com/downloads].
The installation process for the OpenECU developer software is performed by a wizard. To
run the wizard, execute the appropriate installer program. The installation can be stopped at
any point by selecting the Cancel button.
The installer requires that the user has administrative rights to make changes on the
computer. If a user without rights is trying to execute the installer a dialog box will be
displayed and the installation stops. Login with an administrator account or contact your
network administrator and try again.
Copyright 2020, Pi Innovo 10Installation
If a version of an OpenECU installer is already running, a dialog box will appear saying so.
Select OK (which stops the current installer) and change to the other OpenECU installer to
continue.
If a version of MATLAB is running, a dialog box will appear saying so. Quit all instances of
MATLAB, then select OK to continue installation.
The installation process starts with an introduction. Select Next to continue.
Copyright 2020, Pi Innovo 11Installation
The next windows to appear present the license agreement for using OpenECU developer
software and related software. Read the license agreements and if acceptable, select I accept
the terms of the License Agreement and then Next. If not acceptable, do not install the
software.
The next window to appear provides a number of components that can be installed or
patched.
Copyright 2020, Pi Innovo 12Installation
The following table breaks out each of the components:
Table 2.1. Install components
Component Required Installed Description
by default
Platform Yes Yes A selection of packages to install, including the
C-API and Sim-API components.
OpenECU Yes Yes Install the Simulink interface to OpenECU,
Sim-API documentation and support packages.
Blockset Yes Yes Install the OpenECU blockset.
Sim-API (optional) Yes Install the OpenECU blockset, ECU Technical
Manuals Specifications and other documentation in
(HTML) HTML format.
Sim-API (optional) Yes Install the OpenECU blockset, ECU Technical
Manuals Specifications and other documentation in PDF
(PDF) format.
Sim-API (optional) Yes Install some examples of how to use the
Examples OpenECU blockset.
OpenECU C- Yes Yes Install the OpenECU C-API files and libraries.
API
C-API Yes Yes Install the C interface to OpenECU,
documentation and support packages.
C-API (optional) Yes Install the OpenECU C-API User Guide,
Manuals ECU Technical Specifications and other
(HTML) documentation in HTML format.
C-API (optional) Yes Install the OpenECU C-API User Guide,
Manuals ECU Technical Specifications and other
(PDF) documentation in PDF format.
C-API (optional) Yes Install some examples of how to use the
Examples OpenECU C interface.
Copyright 2020, Pi Innovo 13Installation
Component Required Installed Description
by default
Extended (optional) No Install the On-Board Diagnostic (OBD) library.
Diagnostics This library is available at extra cost.
Features
Python Yes Yes Install the Python application. This application is
used to provide build support when generating
and compiling the model source code.
Tools (optional) No Installs additional OpenECU tools.
GCC (optional) Yes Installs the GNU Compiler Collection (v4.7.3)
and related tools for OpenECU targets.
lmadmin (optional) No Installs the installers for the lmadmin license
installer server from flexera.
FreeCCP (optional) No Installs the FreeCCP programming tool (note
that this tool is provided without support or
warranty).
Integration (optional) Yes Options to have the OpenECU installer integrate
OpenECU with third party tools, like MATLAB
and INCA.
MATLAB (optional) Yes During installation, the OpenECU blockset is
Integration integrated into MATLAB's PATH.
INCA-ProF (optional) No During installation, INCA-ProF is update to
Integration understand how to program an OpenECU.
Start Menu (optional) Yes During installation, the Window's Start menu
Shortcuts is updated to include shortcuts to installed
components.
Adjust the component selection as required (especially if you require the installer to update
an installed copy of ETAS INCA) and select the Next button.
The next window asks for a destination path to be specified. By default, the installer presents
a path to your local drive.
Copyright 2020, Pi Innovo 14Installation
Warning
If the default path is changed, ensure that only digits, upper and lower case letters and
the _ character are used to specify directory names. An installation path that includes
any space characters will cause problems later on.
If the MATLAB integration component was selected, the next window presented provides a
list of installed and compatible versions of MATLAB. The example here shows that OpenECU
should be integrated with MATLAB R2008b.
Select which versions of MATLAB will be used with OpenECU and select the Next button.
If no version should be updated select None.
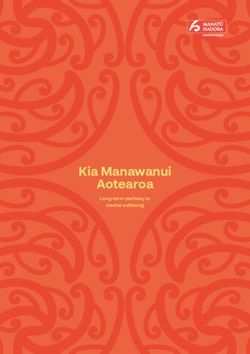
If no compatible versions of MATLAB were found, the next window presents the command
to run to add OpenECU to MATLAB (more details given in Section 2.5.2, “MATLAB”).
Copyright 2020, Pi Innovo 15Installation
If the INCA-ProF integration component was selected, the next window presented provides
a list of installed versions of INCA.
Select which versions of INCA will be used with OpenECU and select the Next button. If no
version should be updated select None.
Note
If any version of INCA is selected, then the installer will add OpenECU integration to
all versions of INCA. This is simply a consequence of the way INCA works.
If no versions of INCA were found, the next window presents details on how to achieve this
by hand (more details given in Section 2.5.5, “ETAS INCA calibration tool”). The instructions
should be carried out when INCA-ProF runs.
Copyright 2020, Pi Innovo 16Installation
If the Start Menu Shortcuts component was selected, then the next window presented asks
the user to select where in the Start menu the OpenECU items will be added. During install,
the installer adds short cuts to the documentation components selected and to the OpenECU
uninstall application.
Once installation has completed, the user is provided an option to read the getting started
guide, the release notes and to visit the OpenECU web site.
Getting started guide
If you are a first time user of OpenECU, it is strongly recommend following the
getting started guide, which covers what tools can be used with OpenECU and how to
configure OpenECU and those tools to work together.
Copyright 2020, Pi Innovo 17Installation
Release notes
If you are installing a new version of OpenECU, it is strongly recommended that
you read the release notes. Some releases of OpenECU change the functionality of
features which may have an impact on existing applications.
2.3. License setup
Machine identification generated by the license tools is required to activate an OpenECU
platform license.
This section is a quick setup guide to get OpenECU working with your license. Consult
the license administration guide for more information on license management and
administration. This document is provided with the installation at "[install path]\doc_user
\License-Administration-Guide.pdf".
2.3.1. Floating license
To setup a floating license, the vender daemon will have to be run on the designated license
server as well as have a license file on that machine. This section describes setting up the
vendor daemon for a floating license.
2.3.1.1. Server
• After installing the platform, copy the files in "[install path]\tools\flexera\i86_n3\" to your
designated license server. On that machine, run lmtools.exe.
• Select the "System Settings tab", check "Include Domain", and press the button that says
"Save HOSTID Info to a File".
• Email the file to Pi Innovo with the purchase order. When the purchase is complete, Pi will
send you a valid license file. (Or if you have already completed the purchase, reply to the
welcome email with this information)
• It is recommended that lmadmin license server manager be used to serve licenses. Run
the lmadmin installer to install the software. Once the installation is complete, copy the
vender daemon, openecu.exe, into the install directory, "C:\Program Files (x86)\FlexNet
Publisher License Server Manager\".
Copyright 2020, Pi Innovo 18Installation
• Start the license server manager. You can then use the web interface to upload the license
file and start serving your license.
Note
If a license has not yet been purchased, email the file to Pi Innovo with the purchase
order. When the purchase is complete, Pi will send a valid license file. If the purchace
has already been completed, reply to the welcome email with this information.
• It is recommended that lmadmin license server manager be used to serve licenses. Run
the lmadmin installer and start the license server manager. The web interface can then be
used to upload the license file and start serving your license.
Note
Details on installing and using the lmadmin tool are in Chapter 9 of the License
Administration Guide, "[install path]\doc_user\License-Administration-Guide.pdf".
Note
lmgrd is also provided with the platform as an alternative to lmadmin; consult Chapter
10 of the License Administration guide for details on its use.
2.3.1.2. Client
• On the user development machine, set the environment variable
OPENECU_LICENSE_FILE to @to tell the OpenECU platform to look
for a floating license from the license server.
2.3.2. Node-locked license
To setup a node-locked license, a license file must be placed on the development machine.
• After installing the platform, run the file: '[install path]\tools\flexera\i86_n3\lmtools.exe'
• Select the "System Settings tab", check "Include Domain", and Press the button that says
"Save HOSTID Info to a File" (see screen shot above)
• Email the file to Pi Innovo with the purchase order. When the purchase is complete, Pi will
send you a valid license file. (Or if you have already completed the purchase, reply to the
welcome email with this information) If a license has not yet been purchased, email the
file to Pi Innovo with the purchase order. When the purchase is complete, Pi will send a
valid license file. If the purchace has already been completed, reply to the welcome email
with this information.
• Copy the file to the directory "C:\openecu" or update the OPENECU_LICENSE_FILE
environment variable with the location of your file.
Note
A floating license can be temporarily assigned as a node-locked license by navigating
to '[install path]\tools\flexera\i86_n3\' and executing 'lmutil lmborrow' in a command
window. To get more information run 'lmutil lmborrow help'.
Copyright 2020, Pi Innovo 19Installation
2.4. Removing OpenECU
Navigate through the Windows All Programs Start Menu shortcuts and find the OpenECU
Developer Software directory. Select the version of OpenECU to remove and run the
uninstaller.
The uninstaller requires that the user has administrative rights to make changes on the
computer. If a user without rights is trying to execute the uninstaller a dialog box will be
displayed and the uninstaller stops. Login with an administrator account or contact your
network administrator and try again.
If a version of an OpenECU uninstaller is already running, a dialog box will appear saying
so. Select OK and change to the other OpenECU uninstaller to continue.
The uninstaller presents the location of the previous install to remove. Select the Uninstall
button to continue (this will remove that version of OpenECU) or select the Cancel button
to stop the uninstall.
Copyright 2020, Pi Innovo 20Installation
When uninstalling, if this version of OpenECU is present in MATLAB's PATH, then the
uninstaller will not remove the reference. Next time MATLAB is started, it will try to gain
access to the deleted OpenECU directory and will raise an error. When this occurs, manually
remove the OpenECU directories by selecting MATLAB's menu option File->Set Path....
Note
The OpenECU uninstaller does not remove the INCA-ProF configuration files for CCP.
2.5. Integration notes for third party tools
2.5.1. Microsoft Windows 10
2.5.1.1. Integration
The installer integrates the OpenECU package with Windows 10 by modifying the Start menu,
by modifying some registry items and by copying files to a local drive.
2.5.1.2. Known defects/issues
OpenECU developer software may not function correctly on encrypted drives. OpenECU
developer software must be able to create files on the host file system. If using an encrypted
drive, be sure that permission settings will allow OpenECU to create files. Pi Innovo cannot
provide support for issues with encrypted drives.
2.5.2. MATLAB
2.5.2.1. Integration
The installer integrates the OpenECU package with MATLAB and Simulink. However, if for
any reason the installer could not find an installed version of MATLAB, the user can manually
integrate the OpenECU blockset by issuing the following MATLAB commands:
addpath '[install path]\openecu'
addpath '[install path]\openecu\rtw\c\openecu_ert\code_templates'
addpath '[install path]\openecu\rtw\c\openecu_ert'
addpath '[install path]\openecu\rtw\c\openecu_grt'
addpath '[install path]\openecu\rtw\c\openecu_grt_rsim'
addpath '[install path]\openecu\mex_r'
addpath '[install path]\openecu\mfile'
addpath '[install path]\openecu\model'
Note
where the text [install path] is replaced by the installed location of the OpenECU
blockset, e.g., c:\openecu\platform\1_9_2; and the text is replaced
with the major version of MATLAB (e.g., 2013b or 2013b_64 for 64-bit versions of
MATLAB).
Once the path has been added, the user can check the OpenECU version by issuing the
following MATLAB command:
ver openecu
A correct response will look something like:
OpenECU Blockset (Pi Innovo) Version
Copyright 2020, Pi Innovo 21Installation
If nothing is printed, or an error message is returned, then the path specified by the addpath
command was incorrect and should be changed.
2.5.2.2. Known issues
• Open: When loading an OpenECU model, Simulink may issue warnings similar to this:
Warning: Model '...' was last saved using an old version (...) of Simulink.
For advice on upgrading this model to the current version of Simulink, see
the Upgrade Advisor.
> In oe_test_required_platform_vers at 26
In oe_make_rtw_hook at 153
In openecu_make_rtw_hook at 6
In general\private\openmdl at 13
In open at 159
In uiopen at 167
Workaround: Turn off the Notify when loading an old model option in Simulink's
preferences:
2.5.3. PiSnoop
2.5.3.1. Integration
Unlike some other calibration tools, during installation there is nothing special to be done
when integrating PiSnoop and OpenECU.
2.5.3.2. Known defects/issues
None.
2.5.4. ATI Vision
2.5.4.1. Integration
Unlike some other calibration tools, during installation there is nothing special to be done
when integrating Vision and OpenECU.
Copyright 2020, Pi Innovo 22Installation
2.5.4.2. Known defects/issues
• Open: integration issues with OpenECU while creating a Vision VST (strategy) file.
There have been integration issues between Vision and OpenECU, when the user
requests a build create a Vision VST (strategy) file. If OpenECU cannot create a strategy
file, then it may be necessary to register the COM interface for Vision by running the
RegisterCOMInterface.bat file included in the install of ATI Vision.
• Open: does not operate correctly with encrypted hard drives.
There have been reports of Vision interacting poorly with encrypted hard drives. At the
moment, it is not clear what the problem might be. On one occasion, Pi worked with ATI
and a customer and determined a work around that is not understood. The work around
was to rename the executable file for Vision to something longer than 11 characters.
• Open: some earlier versions do not support CCP seed/key correctly.
ATI Vision 2006 (v3.2) is the earliest version for which CCP seed/key security has been
validated by Pi Innovo. Earlier versions may support CCP seed/key security (see the
relevant Vision documentation) but bugs in the CCP implementation on various targets
are known to exist. ATI have recommended that earlier versions should not be used, or
should be used with caution.
2.5.5. ETAS INCA calibration tool
2.5.5.1. Integration
The installer integrates the OpenECU package with the ETAS INCA tool. However, if for
any reason the installer could not find an installed version of INCA, the user can manually
integrate the necessary ProF component.
The INCA-ProF tool programs OpenECU over CCP using a set of configuration files. In order
to manually integrate these configuration files, the user must run INCA, open an experiment,
select manage memory then flash programming.
The user is then presented with a dialog box to browse ProF configurations, or a ProF settings
dialog box (in which case the user must select Configure...).
With the browse ProF configurations dialog box, select the "Install..." button and browse to
the install location of OpenECU:
[install path]\tools_integration\inca_prof
and select OK. This will have manually installed the INCA-ProF configuration file for
OpenECU.
Note
If manually integrating and the ProF files cannot be found in the location above, then re-
run the OpenECU installer and select the Integration -> INCA-ProF Integration option
and try again.
2.5.5.2. Known defects/issues
None.
Copyright 2020, Pi Innovo 23Installation
2.5.6. Vector CANape
2.5.6.1. Integration
Unlike some other calibration tools, during installation there is nothing special to be done
when integrating CANape and OpenECU.
2.5.6.2. Known defects/issues
None.
2.5.7. Wind River (Diab) C Compiler v5.9.4.8
2.5.7.1. Installation
The Wind River (Diab) compiler 5.9.4.8 can be installed by running the file setup.exe from
the supplied media — several options will be presented during the compiler install and the
following responses should be used:
• On Choose your Activation Type window, select one of the following options:
• Permanent activation if you have been assigned with a license file from Wind River,
usually named WRSLicence.lic. The full path should point to the license file.
• Temporary activation if you wish to use the Wind River (Diab) compiler on an evaluation
basis, or temporary basis until a permanent license is provided.
• If using a single version of the Wind River (Diab) compiler, either setup the
OPENECU_DIAB_5_9_4_8 environment variable as described in the next point, or adjust
Window's system path to include the absolute path to the compiler's bin directory.
• If using multiple versions of the Wind River (Diab) compiler (for instance, when you are
using two or more versions of OpenECU which require different versions of the Wind River
(Diab) compiler), the environment variable OPENECU_DIAB_5_9_4_8 must be set to the
absolute path to the compiler's bin directory. This macro must terminate in a “\” and must
use the DOS 8.3 short naming convention.
E.g., D:\Progra~1\diab\5_9_4_8\win32\bin\
2.5.7.2. Known defects
There is a compiler defect in which the optimizer may ignore local variable assignments under
certain cases. Compiler patch diab_5_9_4_8_patch_TCDIAB-14743 is available from the Pi
Innovo website.
2.5.7.3. Known issues
• Closed: compiling the main model file can take a long time.
Small models compile in a short period of time, but once the code presented to the compiler
exceeds a limit, the compiler takes a long time to compile the main model file (model-
name.c).
Workaround: the compiler sets aside an amount of memory for the compilation phase
and if the size of the model code exceeds the limit, the compilation slows down. This can
be avoided by increasing the size of the compiler's buffer using a command line option.
Add the pcomp_CompileOptions block to the model, set the mode parameter to Add
to options and set the compiler options parameter to -Xparse-size=100000. If the
compilation is still slow, increase the option value further.
Copyright 2020, Pi Innovo 24Installation
2.5.8. Python
Python is general purpose, high level interpreted programming language, distributed under
the PSF license which allows use in non open-source commercial applications. The license
can be found in the [install path]\tools\python\license.txt file.
2.5.8.1. Installation
Python is a required component of the OpenECU installation.
2.5.8.2. Known defects
None identified.
2.5.8.3. Known issues
• Open: When using OpenECU, Python may raise an error about an incorrect DLL. For
example, “The procedure entry point for X could not be located in the dynamic link library
py[name].dll”. This can occur if another application installed on the same machine as
OpenECU has also installed Python (for instance, dSpace ControlDesk).
Workaround: Browse to the Windows system directory. Depending on the version of
Windows, this will be one of:
c:\windows\system32; or
c:\windows\syswow64
Locate the DLL referred to in the error message. The file will start with the characters “py”
and end with “.dll”. Group all Python DLLs and move them to a temporary location, then
restart OpenECU.
Temporarily moving DLLs will cause the other application to run incorrectly (and if DLLs
unrelated to Python are inadvertantly moved, then the applications that rely on those DLLs
may not run correctly). You can resolve this by returning the moved DLLs to their original
location, or possibly moving the DLLs to the location of the installed applications.
Note
The OpenECU installation of Python does not write files to the Windows directories,
or modify global registry entries relating to Python. As such, the OpenECU
installation of Python is entirely local to OpenECU and will not affect other packages.
Copyright 2020, Pi Innovo 25Chapter 3. Change log
3.1. Feature sets ...................................................................................................... 26
3.2. Version numbering ............................................................................................. 26
3.3. Product marked as deprecated or end-of-life ....................................................... 27
3.3.1. Deprecated items .................................................................................... 27
3.3.2. End-of-life items ...................................................................................... 29
Use these release notes, a log of changes to the software packages over time, when
upgrading to a newer version to learn about:
New Features
New features introduced by this version, or significant changes to
existing features;
Fixes and Improvements
Fixes or improvements to existing features with details of why they were
previously wrong;
Outstanding Issues
Any issues known to cause problems in the latest release.
3.1. Feature sets
As described in the installation section, some features are provided as standard and some
features are optional (for instance, the On-Board Diagnostic (OBD) library). The release note
details changes for all feature sets, standard and optional, regardless of the feature sets
selected during installation.
Optional feature sets include:
• Firmware support for ISO reprogramming
• Firmware support for J1939 reprogramming
• ISO 15765 messaging support for J1979, KPW2000 and UDS
• J1939 messaging support for various DMs (DM1 and DM2 transmit and decode included
as standard)
• Extended diagnostic trouble code support (basic DTC support included as standard)
• In-use performance ratio, diagnostic test monitoring and entity support
• Freeze frame capture and storage support
3.2. Version numbering
Each software release has a version number and an optional tag. Each combination of
version number and tag is unique.
Version number
A version number consists of three numbers, separated by periods:
major, minor and sub-minor. For instance, the version number 1.8.3 has
a major number of 1, a minor number of 8, and a sub-minor number of 3.
A version number is more recent than another, when its numerical value
is larger. For instance, version 1.8.3 is more recent than version 1.7.5.
Version tag
A version tag is a textual string used to identify development versions
of the software, and typically ends with a tag number. For instance, the
Copyright 2020, Pi Innovo 26Change log
version tag pre-dev-2 would indicate the second development release
of the software.
Tags which start with pre indicate that the software is based on an earlier
version and that the final release of the software is likely to have the
same version number. For instance, the version number and tag 1.8.3-
pre-dev-3 indicates that the software is based on a version earlier than
1.8.3 and the final version of software will be 1.8.3.
Tags which start with post indicate that the software is based on the
same version and that the final release of the software is likely to have
the next version number. For instance, the version number and tag
1.8.3-post-dev-3 indicates that the software is based on the release
version of 1.8.3 and the final version of software will be 1.8.4.
3.3. Product marked as deprecated or end-of-
life
From time to time, Pi will announce when parts or features of the product become deprecated
or have reached their end-of-life. This section details deprecated and end-of-life items
identified prior to this release. An up-to-date list can be found on the Pi Innovo website (http://
www.pi-innovo.com/support-center/compatibility [https://www.pi-innovo.com/support-center/
compatibility-2]).
Deprecated
Features of the product that will no longer be available or supported in
the future. Announcement of deprecation indicates features that should
be avoided. Features may become deprecated for different reasons. For
instance, an ECU may become redundant due to component availability.
Or it may be that a feature is considered extraneous and may be
removed to simplify the product.
Deprecated features remain available for a limited period of time to
allow transition to a replacement (if one is appropriate). For example,
if a Simulink model is developed using MATLAB R2008b and support
for MATLAB R2008b becomes deprecated, then support for MATLAB
R2008b will continue for a period of time to allow the model to be
transitioned to another version of MATLAB.
End-of-life
Announcement of end-of-life follows deprecation, indicating features
that are no longer available or supported. For instance, an ECU that
is announced end-of-life will no longer be available for purchase.
Requesting support for a version of the developer software marked end-
of-life will result in a request to upgrade to a supported version of the
software.
3.3.1. Deprecated items
Developer software features
The following Sim-API developer software features will be removed in
a future release:
Block Replacement
put_SignalGapDetection This functionality can be implemented with native Simulink
blocks.
Copyright 2020, Pi Innovo 27Change log
Block Replacement
put_SignalPrepare This functionality can be implemented with native Simulink
blocks.
put_SignalValidate This functionality can be implemented with native Simulink
blocks.
put_FaultCheck This functionality can be implemented with native Simulink
blocks.
put_RangeCheck This functionality can be implemented with native Simulink
blocks.
put_SlewRateCheck This functionality can be implemented with native Simulink
blocks.
pai_AnalogInput Use the pai_BasicAnalogInput block to read analog inputs,
range and slew rate checks can be implemented with native
Simulink blocks.
pnv_AdaptiveMap1d Use the pnv_file block to manage NVM data storage.
pnv_AdaptiveMap2d Use the pnv_file block to manage NVM data storage.
pnv_AdaptiveScalar Use the pnv_file block to manage NVM data storage.
pnv_array Use the pnv_file block to manage NVM data storage.
put_Calmap1d Use the Simulink 1-D Lookup Table.
put_Calmap2d Use the Simulink 2-D Lookup Table.
put_Debounce This functionality can be implemented with native Simulink
blocks.
put_BufferedRateTransition Use the Simulink rate transition blocks.
put_BufferedRateTransition_Write
Use the Simulink rate transition blocks.
prtw_ShowSampleTimeColoursUse the built-in Sample Time Display in Simulink.
pcx_CANStatus Replaced by the pcx_BusStatus block in version 1.8.4.
The following C-API developer software features will be removed in a
future release:
Function Replacement
pax_set_input_update_rate() No replacement, no longer required since version
1.8.0.
pax_set_output_update_rate() No replacement, no longer required since version
1.8.0.
pcfg_softswitch_m460() Replaced by pcfg_setup_m460() in version
1.8.0.
pcx_is_bus_unavailable() Replaced by pcx_get_bus_state() in version
1.8.4.
pdx_set_input_update_rate() No replacement, no longer required since version
1.8.0.
pdx_set_output_update_rate() No replacement, no longer required since version
1.8.0.
pss_set_switch() Replaced by pss_set_safety_switch() in
version 1.7.3.
Copyright 2020, Pi Innovo 28Change log
Declaration Types Replacement
volatile const Replaced by the OE_CAL macro in v2.2.0 for
cross compiler compatibility when declaring or
defining calibrations. Other variable types should
not change the use of those qualifiers.
The following supporting software will be removed in a future release:
Tool Replacement
FreeCCP Replaced by PiSnoop [http://www.pisnoop.com]
(demo or trial available on request).
Third-party tools
The following third-party tool support will be removed in a future release.
Third party tool Replacement
MathWorks MATLAB R2015a MATLAB latest version (see Pi Innovo's website [http://
www.pi-innovo.com/support-center/compatibility] for a
MathWorks MATLAB R2015b
complete list of supported versions of MATLAB).
MathWorks MATLAB R2016a
MathWorks MATLAB R2016b
MathWorks MATLAB R2017a
MathWorks MATLAB R2017b
3.3.2. End-of-life items
Developer software
The following developer software releases are marked end-of-life and
are no longer supported.
Developer software Replacement
Up to Version 3.0.2 (r2019-2) Version 3.0.3 (r2019-3) or later.
Developer software features
The following Sim-API developer software features are marked end-of-
life and have been removed from the developer software package:
Block Replacement
pj1939_Dm1Decode Replaced by the pj1939_Dm1Receive and
pj1939_Dm1DecodeDtc blocks in version 2.6.0 (r2016-1).
pj1939_Dm2Decode Replaced by the pj1939_Dm2Receive and
pj1939_Dm2DecodeDtc() blocks in version 2.6.0 (r2016-1).
pj1939_Dm6Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm12Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm16Transmit No replacement. Use the pj1939_PgTransmit block for this
functionality.
pj1939_Dm23Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
Copyright 2020, Pi Innovo 29Change log
Block Replacement
pj1939_Dm27Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm28Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm29Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm31Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm41Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm42Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm43Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm44Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm45Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm46Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm47Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm48Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm49Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm50Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm51Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
pj1939_Dm52Transmit Replaced by the pj1939_TransmitDtcDm block in version
3.1.0.
The following C-API developer software features are marked end-of-life
and have been removed from the developer software package:
Function Replacement
pj1939_dm1_decode() Replaced by pj1939_dm1_receive() and
pj1939_dm1_decode_dtc() in version 2.6.0
(r2016-1).
pj1939_dm2_decode() Replaced by pj1939_dm2_receive() and
pj1939_dm2_decode_dtc() in version 2.6.0
(r2016-1).
pj1939_dm6_transmit() Replaced by pj1939_ext_dtc_transmit() in
version 3.1.0.
pj1939_dm12_transmit() Replaced by pj1939_ext_dtc_transmit() in
version 3.1.0.
Copyright 2020, Pi Innovo 30You can also read