Not playing by the rules: Play, problems, and human cognition - Laura Schulz Early Childhood Cognition Lab BAICS Talk, April, 2020 - Bridging AI ...
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Not playing by the rules: Laura Schulz
Early Childhood
Play, problems, and human Cognition Lab
BAICS Talk,
cognition April, 2020
Not playing by the rules: Laura Schulz
Early Childhood
Play, problems, and human Cognition Lab
BAICS Talk,
cognition April, 2020
Few claims are more widely accepted …
… and so hard to substantiate
“The most irritating feature of
“No behavioral concept has
play is not the perceptual
proved more ill-defined,
incoherence, as such, but rather,
elusive, controversial, and
that play taunts us with
even unfashionable than
inaccessibility. We feel that
play” (E. O. Wilson, 1975)
something is behind it all, but
we do not know, or have
forgotten how to see it.” (Fagen,
1981 in Sutton-Smith, 1997)What is play for?
❖ Non-cognitive ends
❖ For pleasure (Buhler, 1935; Buytendijk, 1933; Gilmore, 1966)What is play for?
❖ Non-cognitive ends
❖ For pleasure (Buhler, 1935; Buytendijk, 1933; Gilmore, 1966)What is play for?
❖ Non-cognitive ends
❖ For pleasure (Buhler, 1935; Buytendijk, 1933; Gilmore, 1966)
❖ For performance (Hawkes. & Bird, 2002; Hingham, 2014; Smith,
1976; Zahavi & Zahavi, 1997)What is play for?
❖ Non-cognitive ends
❖ For pleasure (Buhler, 1935; BuytendiBaldwin & Baldwin, 1974; Bekoff,
1974; Berman, 1982; Drea et al., 1996; Pellis & Pellis, 1992; Porier & Smith,
1974; Spinka et al., 2001; Soderquist & Serena, 2000jk, 1933; Gilmore, 1966)
❖ For performance (Hawkes. & Bird, 2002; Hingham, 2014; Smith,
1976; Zahavi & Zahavi, 1997)
❖ For peace-making (Baldwin & Baldwin, 1974; Bekoff, 1974; Berman,
1982; Drea et al., 1996; Pellis & Pellis, 1992; Porier & Smith, 1974; Spinka et
al., 2001; Soderquist & Serena, 2000)What is play for?
❖ Non-cognitive ends
❖ For pleasure (Buhler, 1935; BuytendiBaldwin & Baldwin, 1974; Bekoff,
1974; Berman, 1982; Drea et al., 1996; Pellis & Pellis, 1992; Porier & Smith,
1974; Spinka et al., 2001; Soderquist & Serena, 2000jk, 1933; Gilmore, 1966)
❖ For performance (Hawkes. & Bird, 2002; Hingham, 2014; Smith,
1976; Zahavi & Zahavi, 1997)
❖ For peace-making (Baldwin & Baldwin, 1974; Bekoff, 1974; Berman,
1982; Drea et al., 1996; Pellis & Pellis, 1992; Porier & Smith, 1974; Spinka et
al., 2001; Soderquist & Serena, 2000)What is play for?
❖ Cognitive ends
❖ For practice (Groos, 1898; see also Bekoff & Byers, 1998; Burghardt,
2005; Fagen, 1981; Pelligrini, Dupuis, & Smith, 2006)But see Caro, 1980; Sharpe, 2005; Sharpe & Cherry,
2003; Watson, 1993What is play for?
❖ Cognitive ends
❖ For practice (Groos, 1898; see also Bekoff & Byers, 1998; Burghardt,
2005; Fagen, 1981; Pelligrini, Dupuis, & Smith, 2006)Why do we play?
❖ Cognitive reasons
❖ For practice (Groos, 1898; see also Bekoff & Byers, 1998; Burghardt, 2005;
Fagen, 1981; Pelligrini, Dupuis, & Smith, 2006)
❖ For prediction (Berlyne, 1966; Bonawitz, van Schijndel, Butler &
Markman, 2012; Bonawitz, et al., 2011; Buchsbaum, Bridgers, Skolnick
Weisberg, & Gopnik, 2012; Chitnis, Silver, Tenenbaum, Kaelbing, & Perez,
2020; Cook, Goodman, & Schulz, 2011; Jirout & Klahr 2012; Gottleib, Oudeyer,
Lopes, & Baranes, 2013; Florensa, Held, Geng, & Abbeel, 2017; Gopnik &
Walker, 2013; Haber, Mrowca, Wang, Li, & Yamins, 2018; Jabria Eysenbach,
Gupta, Levine, & Finn, 2019; Kang et al., 2006; Kulkarni, Narasimhan, Saeedi,
& Tenenbaum, 2016; Legare, 2012; Oudeyer, Gottleib, & Lopes, 2016; Oudeyer
& Smith, 2016; Pathak, Agrawal, Efros & Darrell, 2017; Schmidhuber, 2011;
2013; Schulz & Bonawitz, 2007; Schulz & Standing, 2008; Sim & Xu, 2008;
Singh, Lewis, Barto, & Sorg, 2019; van Schijndel,; Visser, van Bers, &
Raijmakers, 2015; Wood-Gush & Vestergaard, 1991)Even infants explore in ways that are sensitive to
expected information gain
R ES E A RC H | R E S EA R C H A R T I C LE S
R ES E A RC H | R E S EA R C H A R T I C LE S
violation events, here we gave all infants the such auditory-visual “matching” is the pattern when the novel sound played (experiment 2)
violation events, here we gave all infants the such auditory-visual “matching” is the pattern when the novel sound played (experiment 2)
same limited visual exposure to the Knowledge- typically observed in studies of infants’ mapping [F(1,36) = 5.349, P = 0.03, partial h2 = 0.129]
same limited visual exposure to the Knowledge- typically observed in studies of infants’ mapping [F(1,36) = 5.349, P = 0.03, partial h2 = 0.129]
Consistent and Knowledge-Violation outcomes; abilities (21). (18). This confirms that infants’ performance
Consistent and Knowledge-Violation outcomes; abilities (21). (18). This confirms that infants’ performance
all infants had just 10 s to encode the event out- We found that infants’ learning of the object- in experiment 1 reflected successful learning
all infants had just 10 s to encode the event out- We found that infants’ learning of the object- in experiment 1 reflected successful learning
come. A univariate analysis of variance (ANOVA), sound mapping depended on whether they had
Piantadosi et al. of an object property, rather than heightened Page 20
come. A univariate analysis of variance (ANOVA), sound mapping depended on whether they had of an object property, rather than heightened
with looking time to the event outcome as the de- just seen a Knowledge-Consistent or a Knowledge- visual preference for an object that had violated
with looking time to the event outcome as the de- just seen a Knowledge-Consistent or a Knowledge- visual preference for an object that had violated
pendent variable and event type (Solidity or Con- Violation event. A univariate ANOVA, with learn- expectations.
pendent variable and event type (Solidity or Con- Violation event. A univariate ANOVA, with learn- expectations.
tinuity) and outcome type (Knowledge-Consistent ing score as the dependent variable and event In experiment 3, we asked whether viola-
tinuity) and outcome type (Knowledge-Consistent ing score as the dependent variable and event In experiment 3, we asked whether viola-
or Knowledge-Violation) as fixed factors, showed type (Solidity or Continuity) and outcome type tions of expectation enhance learning specif-
or Knowledge-Violation) as fixed factors, showed type (Solidity or Continuity) and outcome type tions of expectation enhance learning specif-
no main effect of outcome type [F(1,36) = 0.002, (Knowledge-Consistent or Knowledge-Violation) ically about objects that violated expectations,
no main effect of outcome type [F(1,36) = 0.002, (Knowledge-Consistent or Knowledge-Violation) ically about objects that violated expectations,
NIH-PA Author Manuscript
P = 0.96] (18) (table S1), which was as predicted as fixed factors, yielded only a significant main rather than about anything that might follow
P = 0.96] (18) (table S1), which was as predicted as fixed factors, yielded only a significant main rather than about anything that might follow
given the short encoding window in our de- effect of outcome type [F(1,36) = 10.691, P = 0.002, a violation. We showed infants (n = 10) the
given the short encoding window in our de- effect of outcome type [F(1,36) = 10.691, P = 0.002, a violation. We showed infants (n = 10) the
sign. Thus, 2any subsequent differences in learn- partial h2 = 0.229]. Infants’ learning scores were continuity violation from experiment 1, with an
sign. Thus, any subsequent differences in learn- partial h = 0.229]. Infants’ learning scores were continuity violation from experiment 1, with an
ing cannot be attributed to longer perceptual significantly greater after Knowledge-Violation object (i.e., ball) hidden behind the left screen
ing cannot be attributed to longer perceptual significantly greater after Knowledge-Violation object (i.e., ball) hidden behind the left screen
exposure to the object in the Knowledge-Violation events than after Knowledge-Consistent events but revealed behind the right. After the object
exposure to the object in the Knowledge-Violation events than after Knowledge-Consistent events but revealed behind the right. After the object
events.
events.
(Fig. 2A). We then compared infants’ learning
(Fig. 2A). We then compared infants’ learning
was revealed in the surprising location, the
was revealed in the surprising location, the
Immediately after this 10-s exposure to the Immediately
scores to chance after(zero).
this 10-s Infants exposure
showed tono theevi- scores to chancereached
experimenter (zero). Infants
in with showed
a new object no evi- (i.e., experimenter reached in with a new object (i.e.,
outcome of the Knowledge-Consistent or the outcome
dence of of learning
the Knowledge-Consistent
after events consistent or the with dence of learning
a block) after events that
and demonstrated consistent
it had witha hid- a block) and demonstrated that it had a hid-
Knowledge-Violation event, we taught all in- Knowledge-Violation
object solidity [t(9) event, = –1.088, we Ptaught
= 0.31]allorin- con- object
den solidity
auditory[t(9) = –1.088,
property (e.g.,P it= 0.31] or con-
squeaked). We den auditory property (e.g., it squeaked). We
fants new information about the object in the fants new [t(9)
tinuity information
= 1.62, Pabout = 0.14] thebut object in thesig-
showed tinuity
then [t(9) = 1.62,infants’
measured P = 0.14] but showed
learning aboutsig- this then measured infants’ learning about this
event. The experimenter demonstrated that the event. The learning
nificant experimenter demonstrated
after violations thatsolidity
to object the nificant learning
new object. Asafter violations to1,object
in experiment solidity 354
we calculated new object.Infants As in first
experiment 1, we calculated
saw a Familiarization trial as in Experiment 1. All infants then saw the same
object had a hidden auditory property (e.g., it object
[t(9)had a hidden
= 3.092, auditory
P = 0.01] property (e.g., con-
and spatiotemporal it [t(9) = 3.092,
learning P = 0.01]
scores and spatiotemporal
by determining con-
the proportion learning scores by determining the proportion
squeaked) by moving it up and down while the squeaked) by moving
tinuity [t(9) = 3.715,itPup and down
= 0.005] while2A
(18) (Fig. theand tinuity
of time [t(9)that
= 3.715,
infants P =looked
0.005] at (18)this
(Fig.new and 355
2A object of time solidity
thatevent
infantsas infants
looked in atthethis
Surprising condition of Experiment 1: a Target Object was placed
new object
sound played synchronously from a hidden sound
tableplayed
S1). synchronously from a hidden table S1). to a distractor object) during the si- (relative to a distractor object) during the si-
(relative
central 356 at the top of the ramp and then released so that it rolled Figure down and1.passed behind the occluding
In location for 2,12we s. Our
askeddependent mea- In
lentexperiment 2, wesubtracting
asked whether this pat- from lent baseline, then subtracting this value from
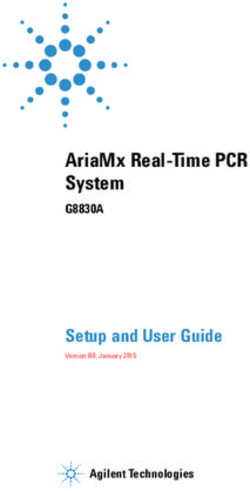
Piantidosi, Kidd, & Aslin, 2014
central location for 12 s. Our dependent mea- experiment whether this pat- baseline, then this value
sure was infants’ learning of this object-sound ternthereflected actualoflearning or simply 1(a):indicated
at An examplethe proportion
display of time
from they looked atthree it dur-boxes and an object (a bottle) appearing from behind one
sure was infants’ learning of this object-sound tern reflected actual learning or simply indicated proportion time they looked it dur- 357 screen, above whichKPA the redshowing
wall protruded. The experimenter then lifted the screen to reveal that
mapping. In the test trial, infants saw the tar- mapping.
greater In the test to
attention trial, infants
objects thatsaw hadthe tar-
violated greater
ing the attention
mappingtotest, objects
when thatthehadtaught sound ing the mapping test, when the taught sound
violated
get object from the preceding event and a new getexpectations.
object from the As preceding
in experiment event1,and a new
infants saw expectations.
played. We As in experiment
found that infants 1, shaped
infants
did notsaw
relationship
map 358 played. between
We found
the object had come
look-away
thatto infants probability
rest on thedid far not map
side of
(y-axis), and log probability (x-axis), with raw binned dat
the wall, as though it had passed through it. As in
distractor object resting silently on the stage distractor
an object object
violateresting
the core silently on the
principle of stage
solidity anthe object
sound violate
to the thenewcoreobject
principle in theof solidity
mapping the sound to the newAdditive
Generalized object in Model the mapping(Hastie & Tibshirani 1990), both collapsing over subjects.
R ES E A RC H | R ES E A R C H A R T I C L E S
(baseline; 5 s). For half the infants, the ball was (baseline;
(n = 10)5 s). or For half the(n
continuity infants,
= 10) and the ball
werewas then (n test;
= 10)theiror continuity
learning scores (n = 10) didand notwere
differthen from 359 test; Experiment
their learning scores
1, infants haddid not differ
10 seconds from
to view this surprising outcome. Then the experimenter
the target and either the car or the block was thetaught
target that
and the either the car or the
object had a hidden auditory block was taught
chance that the=object
[t(9) 0.074,had P = a0.94]
hidden (table S1). An chance [t(9) = 0.074, P = 0.94] (table S1). An
auditory
theproperty
distractor; thisitexploration
Infants’ was reversed for the other
andHowever,
hypothesis property
to infants(e.g., it squeaked).
was arbitrary, in the However, it did during 360 reached thatdown
independent-samples and picked
t totestup and rotated thethat
confirmed red wall, placing it so that its front face was visible
the distractor; this was reversed for the other (e.g., squeaked). during independent-samples t sense
test that
confirmed kinds
thatof information are relevant the
half. testing after violations of expectation notmapping
clearly causally relate to the surprising vio- novelnature of thisthe surprising
pattern event? Whensignificantly
an ob-
half. Then the experimenter moved both ob- theThen
mapping the experimenter
test, we playedmoved both ob-
an entirely novel the this pattern test, we played
differed an entirely
significantly from that 361 differed from that
NIH-PA Author Manuscript
Our finding that violations shaped infants’ lations (because the sound made by an object servation to infants.
conflicts with priorWhereas in Experiment
knowledge, an 1 the red wall was revealed to be solid (Figure 2, Panel 4A),
jects up and down simultaneously while the jects up and
sound (e.g., down simultaneously
rattling). This time, whiledid
way,infants
the not sound (e.g.,
of experiment rattling). This time,
1, inexplanation
which infants infants
for itswere
did
be- taught
not of experiment 1, in which infants were taught
Liu, Ulman,Tenenbaum & Spelke, 2017
learning in a targeted enhancing learn- does not offer a direct effective learning strategy would be to seek
previously taught sound (e.g., squeaking) played previously
increasetaughttheir
ing only sound
about (e.g.,
proportion objects ofsqueaking)
lookingto to
relevant played
the the tar-
observed increase
about their
havior). the very
Besides proportion of looking
object learning
enhancing that had to the evidence
for violated
such tar-
con- 362 about
that inthe
could verytheobject
Experiment
explain 2 the redthat
discrepancy wall
be-had
wasviolated
revealed tocon-have a large opening in its face (Figure 2, Panel
from a hidden central location (mapping test; fromgetaobject
hidden central
violation,
when thelocation
raises a further
novel (mapping
sound question
played test;
about the
after getarbitrary
object[t(18)
tinuity when=the
mappings novel
[like
2.126, P =sound
those acquired
0.048] played after
by Hence,
(18). tween what tinuity [t(18)and
was predicted = 2.126, P = 0.048] (18). Hence,
what is observed.
10 violations
s). For each nature of thewe
infant new informationalearned.
calculated learning In ex- nonhumanofanimals
violations either (22)], do violations
solidity [t(9) =of1.453,
ex- Older
P = children engage
violations
363 inof
thisexpectation
4B). Infants’ kind of hypothesis
looking wasenhanced
measured during learning
the 20 seconds that followed.
10 s). For each infant we calculated a learning of either solidity [t(9) = 1.453, P = violations of expectation enhanced learning
periments 1 to 3, the new information taught pectation privilege the learning of particular testing, performing targeted actions to support
score by determining the proportion of time score
0.18] byordetermining
continuity [t(9) the=proportion
0.036, P = 0.97] of time(table 0.18]
onlyor forcontinuity
the object [t(9)involved
= 0.036, Pin= the 0.97]violation
(table only for the object involved in the violation
or rule out possible explanations for an event
that infants looked at the target object (relative that infants
S1). looked atANOVA,
A univariate the target withobject (relative
learning score S1).event,
A univariate
not for ANOVA,unrelatedwith learning
objects. score
Further, 364
event, not The exploration
forwhether
unrelated phase
objects. that Further,
followed wasin- as in Experiment 1. The experimenter emerged
(23, in-
24). But it is unknown preverbal
Infant learningthe
to the new distractor object) during the base- to the
as thenew distractorvariable
dependent object) during
and eventfollowing:
base-
type (So- as fants’
the dependent
failure tovariable and event
learn about the new type object
(So- fants’test
infants actively failure to learn
hypotheses about about
events, the new object
365 holding
line, then subtracting this value from the pro- line, thenorsubtracting
lidity Continuity) thisand valuesound
Knowledge-Consistent
from the(taught
type pro- lidity
shows or Continuity)
that the enhanced and sound learningtype in especiallyshows
(taught
experi- events that the
involving Target Object
theviolations
enhanced of core (e.g., truck) and a novel Distractor Object (e.g., ball), said, “Look at
learning in experi-
knowledge.
portion of time they looked at the target object portion
soundoffrom timethe theyKnowledge-Violation
looked at the targetcondition
object sound
mentfrom 1 wasthe notKnowledge-Violation
due to general arousal condition
or nov- mentthese!”
1 was and not placed
due toboth general arousal or nov- tray. Infants had 30 seconds to explore the
Spelke,, Wynn, Xu, Woodward, etc.
Event (Solidity)
366
In experiment 4, we first asked whetherobjects
in- on the high-chair
during the mapping test, when the taught during the mapping
of experiment test, when
Knowledge-Violation
1 orEvent
novel sound
(Solidity)
from theexperiment
taught of elty.
experiment
When 1taughtor novelaboutsoundanfrom experiment
object thatfantswas(N =elty. When taught
40) preferentially about an object that was
seek information
sound played (table S1). If infants had success- sound
2) asplayed (table yielded
fixed factors, S1). If infants had success-
only a significant main 2) completely
as fixed factors, yielded only
perceptually a significant
novel (becausemain itfromhadan367completely
object objects.
that perceptually
violated expectationsnovel over (because it had
fully learned the object-sound mapping, they fully learned
effect of soundthe object-sound
type. Infants’mapping, learning they scores effect
never of been
soundseen type.before)
Infants’ butlearning
did notscores an object never
violate that didbeen seen before)
not. Infants saw an event but did not violate
should that eitherany accorded with or violated the prin-
should increase the proportion of time they were increase
significantly thegreater
proportionwhen the
Knowledge-Consistent of taught
time they sound wereanysignificantly
expectations, greater when
infants the taught
showed sound
no evidence expectations, infants showed no evidence
Event (Continuity) ciples of object solidity or (extending our in-
looked at the target object when the sound played; looked
playedat the
in target object
the mapping when the sound played;
test (experiment
Knowledge-Violation
1) than played in the mapping test (experiment 1) than
of learning. of learning.
quiry to another principle) object support (18)
Event (Continuity) (movies S5 and S6). The solidity events were
identical to those in experiment 1 (Knowledge-
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 Consistent outcome, n = 10; Knowledge-Violation
Map to Distractor Object Learning Score Map to Target Object
417 effect
outcome, of(Fig.
n = 10) Object
1A). InType, (1, 36)
the support = 19.09, p = .00, η2 = .35, and no Condition by Object Type
event
(Fig. 1C), infants saw an object (e.g., car) either
pushed interaction.
418 along a surface while remaining
Infants manuallycom-
explored equally after seeing a surprising event accompanied by an
Infant exploration following: pletely supported, thereby according with expec-
Knowledge-Consistent
tations about support (Knowledge-Consistent
Event (Solidity) 419 explanation
outcome, (Mpreference
n = 10), or pushed = -4.50,
over the surfaceSEM = 4.48, CI [-10.73, 1.73]) and after seeing an expected event
edge without falling, thereby violating expect-
NIH-PA Author Manuscript
Knowledge-Violation
Event (Solidity) ations about
420 support =
(Mpreference (Knowledge-Violation
2.38, SEM = 2.76, out-CI [-4.66, 7.86]).
come, n 368
= 10) (25). As before, we limited infants’
visual exposure to the event outcomes; a uni-
variate ANOVA, with looking
Knowledge-Consistent
369 Figure time to the
2. Schematic ofevent
Experiment 2. The experimenter released the Target Object at the top of
Event (Support)
outcome as the dependent variable and event
Knowledge-Violation type (Solidity or Support) and outcome type
Event (Support) 370 the ramp (Panel 1). The Target Object rolled down the ramp and disappeared behind an
(Knowledge-Consistent or Knowledge-Violation)
as fixed factors, showed no main effect of
Knowledge- Knowledge- Knowledge-
Knowledge- Knowledge-
-30 Knowledge-
-20 -10 0 Knowledge-
Knowledge-
10 20 30 Knowledge-
Knowledge- outcome type Knowledge- Knowledge-
[F(1,36) = 0.794, P = 0.379] (18)
Consistent Violation Consistent
Consistent Violation
Prefer Violation
Distractor Object Exploration Score
Consistent
Consistent
Prefer Target Object
Violation
Violation (table S2). Consistent Violation
After infants saw the outcome of the solid- 17
ity or support event, we gave them two objects
Fig. 1. Knowledge-Consistent and Knowledge-Violation outcomes in experiments
Fig. 1. Knowledge-Consistent and1Knowledge-Violation
to 4. (A) Solidity events
Infant (movies
behavior
outcomes inS1experiments
following: and S2). (B)1 Continuity events
to freelyevents
to 4. (A) Solidity explore(movies
for 60 s:S1the target
and S2).object
(B) Continuity events
(movies S3 and S4). (C) Support events (movies S5 and S6). from the preceding event (e.g., car) and a new
(movies S3 and S4). (C) Support events (movies S5 and S6). Knowledge-Consistent
Event (Solidity) distractor object (e.g., ball; for half the infants
the car was the target and the ball was the
Teglas, et al., 2011
Knowledge-Violation
distractor, and for the other half this was re-
92 3 APRIL 2015 • VOL 348 ISSUE 6230 92 3 APRIL 2015 • VOL 348 ISSUE 6230
Event (Solidity)
sciencemag.org SCIENCE sciencemag.org SCIENCE
versed). We calculated infants’ exploration pre-
ference scores by subtracting the amount of
Knowledge-Consistent time they explored the new distractor object
Event (Support) from the amount of time they explored the tar-
Knowledge-Violation get object (table S2). We predicted that infants
Event (Support) 421
who had seen a Knowledge-Consistent event
would show no preference, whereas infants who
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 422
had seenFigure 3. Visual exploration
a Knowledge-Violation
Dev Sci.event preference
would
Author scores
manuscript; (looking
available to Target
in PMC Object
2015 May 01.– looking to Distractor
More Dropping Action Tendency Score (z-score) More Banging prefer to explore the object that had just vio-
lated their expectations. A univariate ANOVA,
Perez & Feigenson, 2020
423 Object) in Experiments 1 and 2. Errors bars reflect SEM. * p < .05.
with infants’ exploration preference score as
Fig. 2. Results from experiments 1 and 4. (A) Infants’ learning after Knowledge-Consistent and the dependent variable and event type (Solid-
Stahl & Feigenson, 2015
Knowledge-Violation events in experiment 1. Bars represent average learning scores (proportion of
looking at target object during mapping test minus proportion of looking at target object during
baseline). (B) Infants’ exploration after Knowledge-Consistent and Knowledge-Violation events in
experiment 4. Bars represent looking at and/or touching the target object minus looking at and/or
424
ity or Support) and outcome type (Knowledge-
Consistent or Knowledge-Violation) as fixed
factors, yielded a significant main effect of out-
425 Finally, as a further test of whether explanations drove infants’ exploratory behavior, we
come type [F(1,36) = 5.933, P = 0.02, partial h2 =
touching the new distractor object. (C) Infants’ exploratory behaviors on the target object after 0.14]: Infants who had seen the Knowledge-
Knowledge-Consistent and Knowledge-Violation events in experiment 4. Bars represent infants’ 426 examined
Violation individual
event explored the targetdifferences
object more in infants’ looking times and their possible link to subsequent
z-scored object-banging behaviors minus z-scored object-dropping behaviors. All error bars rep- than infants who had seen the Knowledge-
resent SEM. Consistent event. We then compared infants’
427 exploration. Because we had hypothesized that seeing an explanation for a surprising event
SCIENCE sciencemag.org 428 would abolish surprise-induced
3 APRIL 2015 • VOL 348 ISSUE 6230 93exploration, we also predicted that the longer infants looked at
429 the explanation (i.e., the red wall with the opening in it), the less they would subsequently
430 explore the Target Object. That is, the more infants processed the explanation, the less drive they• Introduced to “birthday machine” and two objects
– Plays happy birthday when “zando” is on top
– Does nothing when “not a zando” is on top
And children’s exploration
• Asked becomes increasingly
counterfactuals
sophisticated
– “if thisthrough early
one was not a zando childhood
what would happen if we put
Advanced Review
EDs to the child. A short video demo of the toy can be found at: https://osf.io/e2hwq/
wires.wiley.com/cogsci
iew only=bbf6c632dcb646f9a6dc0ac12379ef99. it See
onalsothe machine?”
Figure 1.
– “if this one was a zando,
T.J.P. van Schijndel et al. / Journal of Experimental Child Psychology 131 (2015) 104–119 107
have clear hypotheses on children’s knowledge acquisition, we did this in an exploratory manner as
108 opposed T.J.P.
to a confirmatory
van Schijndel one.
et al. / Journal of Experimental Child Psychology 131 (2015) 104–119
1.3 Procedure Method
what would happen if we put
The experiment was designed for Rule 1 children; the evidence either conflicted with or confirmed
the Rule 1Participants
group’s theory. The responses on the pre-task were used to select the Rule 1 group. How-
ever, because the final classification into theory groups was performed after data collection on the
basis of the The total sample before classification into theory groups consisted of 102 4- to 9-year-olds (45 boys
results of the latent variable technique (see Appendix), all children were administered
and 57 girls, Mage = 66.07 months, SD = 15.56) who were recruited from two primary schools. An addi-
ch child was tested in a private room inside the preschool. The experimenter and the all phases tional
of the12experiment.
children were Importantly,
recruited but notweincluded
report in
only
the the results
analyses; of theeight
of these, Rule 1 group
children werein this article
it on the machine?”
because no clear because
excluded hypotheses could
an error be formulated
was made about
in administering theoreffect
the pre- of (seven
post-task evidence onpushed
children the other theory
the and
group’s play light button during the pre- or post-task and got feedback, and for one child the test leader did
learning.
not time the free play episode) and four children were excluded because no complete video-recordings
of the free play episode were available. The sample characteristics were chosen to allow for an optimal
ild sat at a table, facing each other. On the table was the occluder with the toy inside. Introduction to the shadow
discrimination
school age range,
The experimenter
machine
of a Rule
introduced
1 group. Even though we expected to find Rule 1 children mainly in the pre-
the sample’s ageshadow
the range wasmachine
taken widerbytopointing
guarantee out
sufficient power sources
the light for reliably
and the pup-
classifying children into theory groups. When using a latent variable technique to detect subgroups
pets of different sizes and by demonstrating how the puppets could be placed close to or farther away
of children, the subgroups need to be large enough to be separated from each other. In the preschool
from the light sources. She then
to finddemonstrated
only a small grouphow to make
using the shadows. She therefore,
placed two equally
Bonawitz, Schijndel, Friel & Schulz, 2012
age range, we expected of children a more advanced rule;
sized puppets at equal
we included olderdistances from
children in the thetolight
sample ensuresources, pushed
that we could detectthe light button,
this advanced and(see
rule group said, ‘‘Do you
FIGURE 2 | Various reactions from a child interacting with two ‘Blicket Detectors’ (originally used by Gopnik and Sobel65 ), from the protocol Appendix). This way, we avoided preschoolers having an advanced rule being incorrectly assigned to
see the shadows? This one [pointing to the left shadow] is equally big as this one [pointing to the right
the Rule 1 group. In Results, we describe the Rule 1 sample after classification into theory groups.
described in Legare.66 shadow]. They are the same.’’
Legare, 2012; Sobel & Legare, 2014 Buchsbaum, Bridgers, Weisberg &
Pre-task
Materials
yesterday and whether it rains today are statistically the detector dependent on the presence of another
Gopnik, 2012
The shadow machine, the setup of the shadow task (Inhelder & Piaget, 1958; Siegler, 1978, 1981),
The experimenter
was used for all introduced
four phases of the
thepre-task
experiment.byThe
saying, ‘‘Now
machine we are
consisted going
of two lightto play aa game.
sources, screen Each time I
related, as is whether it rains today and whether it object—that is they examined whether children obey will put puppets
placed 50in cmplace.
from the You
lightthen sayand
sources, whether youcould
puppets that think that the
be placed shadow
between onsources
the light this side
and will be the
will rain tomorrow. Given those dependencies, it is the Markov assumption. Three- and 4-year-olds were biggest [pointing
screen (seetoFig.
the1). left
Whenside of the
a button wasscreen], the
pressed, the shadow
lights on this(they
were activated sidestayed
willlitbeasthe
long biggest
as the [pointing
button was held) and shadows of the puppets were portrayed on the screen. There were two small
to the right side of the screen], or that they will be the same.’’ She then administered 12 items to the
also true that raining yesterday and raining tomor- trained to know that objects that activated the detector puppets (7.5 ! 2.25 cm) and two large puppets (10 ! 3 cm) that could be placed at three distances
child: six size
from items,
the lightinsources
which(10, the20,size
and of
30 the
cm). puppets was varied
Relative shadow but the
size depended ondistance from
both the size the puppets to
of the
row are dependent. The Markov Assumption states were called ‘blickets’. Then, children observed a set of the light sources
object and was
thekept constant
distance from the (see Fig.to2A),
object andsources
the light six distance items,
(the distance in which
from the lightthe distance
sources to from the
that raining yesterday and tomorrow are independent trials in which objects either independently activated puppets tothethescreen
lightwas kept constant).
sources was varied but the size of the puppets was kept constant (see Fig. 2B). The
given the knowledge of whether it rains today. The the machine, or did so only dependent on the presence items wereProcedure
administered in one of two fixed semi-random orders. For each item, the experimenter put
only influence raining yesterday has on raining tomor- of another object. Specifically, on the one cause trials, two puppets in place and said, ‘‘I put this puppet here and this puppet here. When I make the shadows,
which one will be the
Children were biggest? This oneby[pointing
tested individually one of twoto the left side
experimenters in aof the screen],
private thisschool.
room at their one [pointing to
row is through whether it rains today. children were shown two objects. One object (A) acti- The child and experimenter sat at the same side of a table facing the shadow machine. The child
the right side of the screen], or will they be the same?’’ Importantly, during the pre-task, the child did
How could we examine whether children are vated the detector by itself. The other object (B) did was first introduced to the machine and then participated in four experimental phases: pre-task, evi-
not see shadows and, therefore, did not
dence exposure, free play episode, andget any feedback.
post-task. Responses
The total experiment tookon the pre-task
approximately were scored tri-
20 min.
reasoning about the relations among events using the not. Children then saw objects A and B activate the chotomously: correct, incorrect ‘‘the same,’’ or incorrect not ‘‘the same.’’ A latent variable technique
Markov assumption? One difficulty in answering this detector together (twice). Children labeled only object was used to determine children’s naive theories on the basis of these trichotomous responses. This
question is that we need a method that allows us to A as a blicket. Even though object B activated the procedure is explained in the Appendix.
test whether children recognize the conditional inde- detector 2 out of the 3 times it was placed on it, it only
Evidence exposure
pendence relations among events separately from their did so dependent on the presence of object A. If chil-
To enable random assignment (stratified by age and sex) of Rule 1 children to the evidence
prior knowledge about how these events are related. dren reasoned according to the Markov assumption, conditions (conflicting and confirming condition), the pre-task scores were used to perform an
One such experimental paradigm was developed by they would not use the positive association between
Gopnik and Sobel,65 who introduced children to a object B and the machine’s activation to infer the effi- Fig. 1. The shadow machine. During test administration for the study described in this article, no people but the child and the
‘blicket detector’ (see Figure 2), a machine that lights cacy of object B, but rather recognize that such efficacy experimenter were present. Photography: Hanne Nijhuis.
up and plays music when certain objects are placed is conditionally dependent on the presence of object
upon it. The detector presents a novel, nonobvious A. Remove object A from the equation, and object B
property of each object: its activation potential. (The lacks efficacy. Children reasoned in this manner and
machine is controlled through an ‘enabling’ switch. stated that object B was not a blicket. In contrast,
When the switch is on, any object will activate the in an analogous two cause condition, in which an
detector. When it is off, no object will activate the object activated the detector independently two out of
detector). Because the machine is novel, children three times, children were likely to label the B object a
have few expectations about what kinds of objects blicket. Here, object B activates the machine indepen-
Fig. 2. Examples of different types of items and experiments on the shadow machine. For the pre- and post-tasks, size items (A)
activate it. dent from object A, and thus children should use the and distance items (B) were used (without feedback/shadows). For the evidence exposure, a conflict item (C) was used for the
associations they observe.11
Van Shinjndel, Visser, Van Bers,
Using this paradigm, researchers have found that conflicting condition and a confound item (D) was used for the confirming condition (with feedback/shadows). For the free play
episode, the experiments that children performed were assigned to the same categories or in the categories of equal items (E) or
children treat objects that activate the detector by Various investigations have extended these irrelevant items (F). These figures present examples of the different types of experiments (L = large puppet, S = small puppet),
themselves differently from objects that only activate findings to younger children,37 other domains of
Raijmakers, 2015
although other variations are possible. Irrelevant experiments also included experiments with one, three, or four puppets.
© 2014 John Wiley & Sons, Ltd.
Wu & Gweon, 2019
Figure 1: Design and procedure Schulz & Bonawitz, 2007the box for both
the
Uncertainty and exploratory playtest trials. A
activate “hiding
theme song) from
(9 marbles actually go into the box)
mask the soun
placed into the h
Max Siegel
Procedure. Chi
to the task as a g
matic of task in Experiments
Rachel Magid
1-3. Placem
their goal was t
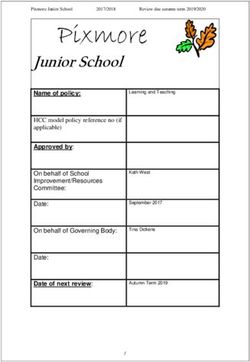
Siegel, Magid, Pelz, Tenenbaum, & Schulz, in press, Nature Communicationsn motion (i.e., excluding any pauses; see SI). Here we report the results of the
since the relationship between uncertainty and exploration may be best
ng time the children could have been planning subsequent actions and
A B
data they generated but the primary results hold for all measures (see Fig. 3A,
Probability
Probability
ize for individual differences in children’s exploratory behavior, we computed
d spent exploring on each trial as a proportion of the child’s total playtime
ls, and multiplied this proportion by the number of trials in the experiment.
less than 1 represents less playtime
Internal Numerical Representation
(and a proportion more than 1, more
Internal Numerical Representation
uld be expected if children distributed their playtime evenly across trials.
proportional playtime to control for individual differences in length of play, all
Models of (log)
untransformed children’s playtimeinternal representation
reported in seconds of (see SI).
y the number, showing of
discriminability (A)different
normal distributions
contrasts, we with adopted a variant of the
ectionfixed
model variance
in which defined over logarithmic
shaking a box with space m marbles (but in it would produce a
awn visualized
from someover linear space)
probability and (B) normal
distribution over a high-dimensional acoustic
distributions
be projected downwith to avariance proportional
one-dimensional space to mean
of abstract numerosity
defined
sentations inover linear space. number system (Dehaene). We modeled the
the approximate
tion for each auditorily
Measure perceived number
the discriminability of each as a normal distribution on a log
with equal variances
contrast between ! but llogarithmically
and m marbles spaced means, and computed the
each contrast between l and m marbles presented in Experiments 4-7 in terms
|&'( &* |
ex " # = , where ,- = log 1 and ,2 = log 3. See SI for a summary of
+
able S1), as well as a discussion of alternative ways of estimating
ncluding different mathematical models, and an empirical estimate from
psychophysical data), which produce nearly identicalNresults
= 96, for
24 our purposes.
children ages 4-8 years (mage= 5.83 years)
ren’s intuitions about task difficulty as proportional to this d’ measure. NoteVIDEO
Children’s exploration precisely tracked the
discriminability of the contrast …
A B
A B
Experiment 4 Experiment 4
Experiment 4 Experiment 4
Experiment 5 Experiment 5
Proportion Playtime * 4
Experiment 5 Experiment 5
Proportion Playtime * 4
Experiment 6 Experiment 6
Experiment 6 Experiment 6
Experiment 7 Experiment 7
Experiment 7 Experiment 7
0.95
r = 0.94
0.95
r = 0.94 r = 0.92 0.89
0.89r = 0.92
Negative Discriminability Negative Discriminability
CC Video coded (including “thinking” time) Arduino motion sensor
Siegel, Magid, Pelz, Tenenbaum, &Figure
Schulz,
3.inChildren’s
Figure press, Nature
3. Children’s Communications
proportional
proportional0.95
r = 0.94
.. and was independent of the actual number of
marbles inC the box.
Figure 3. Children’s
exploration times as
negative discriminab
Proportion Playtime * 4
across Experiments 4
by hand (A) or by the
children’s exploratio
strongly with the diff
discrimination. By co
exploration was unre
number of marbles in
bars indicate SEMs.
Number of Marbles In Box
Strikingly, children’s exploration time was independent of the number of marbles ac
box (Fig. 3C; β=0.0065, 95% CI [-0.0094, 0.022]). Thus, although the sensorimotor
of shaking Siegel, Magid, Pelz,
a box containing Tenenbaum,
only & marbles
one or two Schulz, in press,
was Nature
quite Communications
different from shakinWhy do we play?
❖ Cognitive reasons
❖ For practice (Groos, 1898; see also Bekoff & Byers, 1998; Burghardt, 2005;
Fagen, 1981; Pelligrini, Dupuis, & Smith, 2006)
❖ For prediction (Berlyne, 1966; Bonawitz, van Schijndel, Butler &
Markman, 2012; Bonawitz, et al., 2011; Buchsbaum, Bridgers, Skolnick
Weisberg, & Gopnik, 2012; Chitnis, Silver, Tenenbaum, Kaelbing, & Perez,
2020; Cook, Goodman, & Schulz, 2011; Jirout & Klahr 2012; Gottleib, Oudeyer,
Lopes, & Baranes, 2013; Florensa, Held, Geng, & Abbeel, 2017; Gopnik &
Walker, 2013; Haber, Mrowca, Wang, Li, & Yamins, 2018; Jabria Eysenbach,
Gupta, Levine, & Finn, 2019; Kang et al., 2006; Kulkarni, Narasimhan, Saeedi,
& Tenenbaum, 2016; Legare, 2012; Oudeyer, Gottleib, & Lopes, 2016; Oudeyer
& Smith, 2016; Pathak, Agrawal, Efros & Darrell, 2017; Schmidhuber, 2011;
2013; Schulz & Bonawitz, 2007; Schulz & Standing, 2008; Sim & Xu, 2008;
Singh, Lewis, Barto, & Sorg, 2019; van Schijndel,; Visser, van Bers, &
Raijmakers, 2015; Wood-Gush & Vestergaard, 1991)SWITCH Schulz, Gopnik, & Glymour, 2007, Developmental Science
Interventions on each causal structure will
produce different patterns of evidence.
1 2
S
S
3 4
S S
Schulz, Gopnik, & Glymour, 2007, Developmental Science42
Problems and play
❖ Play might be pleasurable, let us show off, help us bond, teach
us real life skills, and improve our predictive models of the
world …
❖ But when a child tries to reunite a toy octopus with his mama
in a stacking cup …
❖ or catch a velociraptor by sticking play dough under the couch
❖ … these accounts don’t seem very satisfying.
❖ We can use play to assess children’s sensitivity to uncertainty
and expected information gain but that’s not necessarily the
best characterization of what children use it for.Problems and play
❖ However, I do think one thing is true of play — both exploratory play and
pretend play
❖ Children make up problems, and invent plans to try solve them
❖ Can I turn the gears into puppets? Can I hear inside? Can I reunite the
octopus with her mom?
❖ The sheer arbitrariness of these problems may be the point …
❖ the problems and solutions don’t matter.
❖ what matters is the ability to invent new problems and use them to
bootstrap new plans and solutions.
❖ Why? Because the hard problem of cognition is not learning (even deep
learning networks can do that ; )).
❖ The hard problem of cognition is thinking.Program induction workshop: Cogsci 2018 “Coming up with the right hypotheses and theories in the first place is often much harder than ruling among them.” ”How do people, and how can machines, expand their hypothesis spaces to generate wholly new ideas, plans, and solutions?” “How do people learn rich representations and action plans (expressable as programs) through observing and interacting with the world?”
Problems and play
❖ So why create problems you don’t have?
Why set arbitrary goals?
❖ Because problems and goals — all problems
and goals — support search.
❖ Problems impose valuable constraints on
hypothesis generation and planning.Problems are rich in all kinds of information
❖ Consider the information contained in question words (even
before we get to the content of the questions) …
Where? When?
Who?
What?
How?
Which? Why?this rule or empirical engage in some
Why generalization hold? unexpected thought
does …? Why did
… she…?
or action?
…
Why did
this unexpected event
Why did occur?
the it’s a joke
…? chicken
… …?
…
some desirable or
Why Why did it’s a rant
seemingly possible
can’t …? thing happen?
…
Trump …
…?Problems are rich in all kinds of information
❖ We know a lot about our problems before we can solve them
❖ We can have a sense of being on the right track well before
we can better predict or explain observed data…
❖ We can think something is a “great idea” even when we
know it’s wrong.
❖ We might be able to constrain our proposals on two separate
dimensions
❖ How well they fit the data — “TRUTH”
❖ How likely they would be to solve our problem if they
were true — “TRUTHINESS”Problems are rich in all kinds of information
❖ Consider the information contained in question words (even
before we get to the content of the questions) …
Where? When?
Who?
What?
How?
Which? Why?Problems are rich in all kinds of information
❖ Consider the information contained in all kinds of
representations — independent of domain.
Continuous vs discrete
Proportion
Unimodal vs bimodal
Variance Linear vs exponential
Cyclic amplitudeWhich group of aliens bought which set of
rocket ships?
Maddie Pelz Pelz & Schulz, in prepWhich set of factories produced
which set of candies?
Year 1 Year 2 Year 3 Year 4
Year 1 Year 2 Year 3 Year 4
Year 1
Year 1 Year 2 Year 3 Year 4
Pelz & Schulz, in prepPelz & Schulz, in prep
Pelz & Schulz, in prep
Problems and play
❖ Note that there is no fact of the matter … These
answers are not necessarily right but at least they
could be right.
❖ The structure of the problem allows children to
endorse plausible hypotheses that go beyond the
data.Problems and play
❖ The point of play is not that the ideas children propose in play are
accurate or even verifiable or that the plans are achievable (i.e., play
is not chiefly about getting the world right)
❖ The point of play is that it sets up problems — and gives you new
things to be right (or wrong) about.
❖ We may be motivated to play and explore, not only by the progress
we make in learning (e.g., Oudeyer, Gottleib, & Lopes, 2016) but by
the progress we make in thinking.
❖ The fact that a problem contains enough information to let us
generate a thought or plan might itself motivating — independent
of whether those ideas are right are wrong.Problems and play
❖ Finally, although my work and many other
people’s has been motivated by treating play as a
kind of rational exploration …
❖ the problems we set up in play differ in critical
ways from those we undertake when we are not
playing.Goal-directed action Goal-directed play
“There are stickers in the box. Can “There are stickers in the box.
you go in here and try to get one?” Can you play in here and try to
get one?”Goal-directed action Goal-directed play
“There are stickers in the box. Can “There are stickers in the box.
you go in here and try to get one?” Can you play in here and try to
Experiment 2
100% get one?”
Percentage of subjects
75%
50%
25%
0%
Instrumental play
“I need a pencil to fill out this Goal
“I need to fill out this form. While
form. Can you go over there Retrieval Choice I’m doing that can you play over
and try to get a pencil?” Efficient
there and try to get a pencil?”
Inefficient
Junyi Chu
Chu & Schulz, in reviewProblems and play
❖ Children violate principles of rational action in play,
but they do not act either randomly or irrationally
❖ Even when children opt for the harder task, they
behave efficiently with respect to that task
(adhering close to the twirly path, jumping
directly towards the pencils …)
❖ Behavior in play is conditionally rational …rational
with respect to a manipulated utility function.Problems and play
❖ In play, neither the costs nor the reward are real; If
they are, you are no longer playing.
❖ In this sense, all play is pretend play.
❖ In play, we “hack” our own utility function to create
novel goals.
❖ And as a species, this allows us to take on
innumerable goals.We populate the world with problems of our own making— we want to end poverty, cure cancer, write the Great American novel, achieve enlightenment, eat more hot dogs than anyone else …
Problems and play
❖ One reason our motivational system may be as rich as
it is, is because the diversity of goals confer an
advantage for learning
❖ As humans, we can endogenously fix our utilities on
anything.
❖ Epistemic goals are not the only — or necessarily even
the best —
❖ Being able to want anything at all (as a species) might
let us explore a vast space of possible plans and ideas.Problems and play
❖ The world is full of unknown unknowns — as great as
our uncertainty about the world is, there are even more
things we don’t even know we don’t know.
❖ If we only explored in ways that tried to maximize
expected information gain — we would miss the chance
to gain unexpected information.
❖ Creating new problems with no obvious utility in
themselves may be the best way to discover (genuinely)
new thingsWhat is play for? ❖ For pleasure ❖ For performance ❖ For peacemaking ❖ For practice ❖ For prediction ❖ For posing new problems
Thanks!
Max Siegel Rachel Magid
Maddie Pelz
Junyi ChuYou can also read