Measuring Canopy Structure and Condition Using Multi-Spectral UAS Imagery in a Horticultural Environment - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

remote sensing
Technical Note
Measuring Canopy Structure and Condition Using
Multi-Spectral UAS Imagery in a
Horticultural Environment
Yu-Hsuan Tu 1,2, * , Kasper Johansen 1,3 , Stuart Phinn 1,2 and Andrew Robson 2,4
1 Remote Sensing Research Centre, School of Earth and Environmental Sciences,
The University of Queensland, St Lucia 4072, QLD, Australia; kasper.johansen@kaust.edu.sa (K.J.);
s.phinn@uq.edu.au (S.P.)
2 Joint Remote Sensing Research Program, The University of Queensland, St Lucia 4072, QLD, Australia
3 Hydrology, Agriculture and Land Observation Group, Water Desalination and Reuse Center,
King Abdullah University of Science and Technology, Thuwal 23955-6900, Saudi Arabia
4 Precision Agriculture Research Group, School of Science and Technology, University of New England,
Armidale 2351, NSW, Australia; andrew.robson@une.edu.au
* Correspondence: y.tu@uq.edu.au; Tel.: +61-7-3346-7023
Received: 20 December 2018; Accepted: 28 January 2019; Published: 30 January 2019
Abstract: Tree condition, pruning and orchard management practices within intensive horticultural
tree crop systems can be determined via measurements of tree structure. Multi-spectral imagery
acquired from an unmanned aerial system (UAS) has been demonstrated as an accurate and efficient
platform for measuring various tree structural attributes, but research in complex horticultural
environments has been limited. This research established a methodology for accurately estimating tree
crown height, extent, plant projective cover (PPC) and condition of avocado tree crops, from a UAS
platform. Individual tree crowns were delineated using object-based image analysis. In comparison
to field measured canopy heights, an image-derived canopy height model provided a coefficient
of determination (R2 ) of 0.65 and relative root mean squared error of 6%. Tree crown length
perpendicular to the hedgerow was accurately mapped. PPC was measured using spectral and
textural image information and produced an R2 value of 0.62 against field data. A random forest
classifier was applied to assign tree condition into four categories in accordance with industry
standards, producing out-of-bag accuracies >96%. Our results demonstrate the potential of
UAS-based mapping for the provision of information to support the horticulture industry and
facilitate orchard-based assessment and management.
Keywords: unmanned aerial system; horticulture; avocado; canopy structure; tree condition
1. Introduction
Genetic variation, phenological growth stage and abiotic and biotic constraints can all influence
tree structural parameters such as height, canopy extent and foliage density [1–12]. For instance,
vigorous trees usually result in tall and dense canopies that influence the productivity [9–11]. As such,
measurements of these parameters can provide growers with a strong indication of plant health or
vigour, photosynthetic capacity and yield potential [13,14]. In most Australian horticultural industries,
such assessment is usually conducted by on-ground visual evaluation, which is time-consuming,
labour-intensive, subjective and often inconsistent [7,15–17]. Therefore, there is a demand for more
efficient, accurate and quantitative alternatives for such assessments.
Remote sensing has been used to estimate tree canopy structural attributes, such as tree
height, canopy extent, and plant projective cover (PPC), for decades [18–22]. Conventionally,
Remote Sens. 2019, 11, 269; doi:10.3390/rs11030269 www.mdpi.com/journal/remotesensing
Remote Sens. 2019, 11, 269 2 of 19
these types of data were acquired by either satellites or aircrafts, which are time and weather
constrained. In the case of satellite data, it is difficult to acquire data with on-demand spatial,
spectral, and temporal specifications that is tailored for specific sites, products, and delivery times
for horticultural applications [23]. More recently, UAS have been considered as a useful platform to
acquire suitable remotely sensed data for measuring horticultural tree crop structure, as it provides both
higher spatial and temporal resolution and the flexibility of operations [6–8,18]. Airborne image data,
initially stereo-photography, were analyzed using soft-copy photogrammetry to provide information
for extracting ground and canopy heights [2–7,24], while more recently this has been done by collection
and processing of LiDAR point clouds [1,25–28]. Similar products are now generated from UAS
multi-band image data using multiple forms of softcopy photogrammetry, such as structure from
motion (SfM). As SfM algorithms have become part of the standard procedure of UAS image processing
workflows, UAS imagery has the potential to become a more accepted method for measuring tree
structure, providing a similar degree of accuracy and better spectral fusion compared to LiDAR
systems [6,29].
Canopy structural dimensions can be expressed by the tree height and the tree crown extent [4],
while the canopy density can be expressed by the PPC [21]. PPC is defined as the vertically projected
fraction of leaves and branches in relation to sky, which is often referred to as canopy cover or crown
cover [20–22]. It has been proved to be a good indicator of biomass [20,21]. Previous studies have
estimated PPC at the site scale [22,30]. However, for tree crop managers, the plant-scale condition of
individual trees is more relevant when applying agricultural inputs at the tree level [16]. Plant-scale
PPC estimation using near-infrared (NIR) brightness from multi-spectral UAS imagery has proved to
be an accurate approach for lychee trees [7]. As the canopy structure of lychee trees is considered to be
‘rhythmic’ [31], little is known about whether such plant-scale PPC estimation techniques are feasible
for other tree crops such as avocado trees, as the architecture of avocado trees is significantly different
to lychee trees [32]. Although Salgadoe, et al. [33] suggested that photo-derived PPC is also a good
indicator of avocado tree condition, the difference of canopy density is not significant to differentiate
trees between moderate and poor condition [33]. Hence, combining the canopy structural dimension
for tree vigour estimation may be beneficial [13]. The estimated tree height and canopy extent derived
from UAS imagery are now considered highly accurate in comparison to ground measurements [4–8],
yet limited research has integrated the dimension and PPC to express tree condition.
Tree condition evaluation methods are generally conducted by classifying trees into condition
categories based on visual assessment of tree canopy structure. This assessment is based on tree canopy
structure, and hence should be quantifiable from the aforementioned structural attributes that derived
from UAS imagery. Johansen, Duan, Tu, Searle, Wu, Phinn and Robson [15] used near-infrared (NIR)
brightness as the input feature of a random forest classifier to predict the condition of macadamia
trees. Different growing stages and levels of stress for avocado trees produce changes in overall
canopy form [33], and the amount of leaf, stem and trunk biomass, these resulted in different NIR
reflectance levels [34–36] which were detected by the classifier in the study. The results indicated a
moderate accuracy, hypothesised to be attributed to the very high spatial resolution of the UAS imagery,
combined with the complex NIR scattering properties of the tree crop leaf and canopy structures.
Based on this foundation, we explored methods that use all the available image-derived structural
attributes and linked these with the field-derived structural measurements for condition assessment.
The objectives of this work were to:
1. use multi-spectral UAS imagery to map and assess the accuracy of tree height, canopy width and
length, and PPC estimates for avocado trees, and
2. use the highly correlated image-derived structural attribute maps to produce a tree condition
ranking matched to on-round observer techniques.
This study explores a novel and innovative approach to assess horticultural tree crop condition
directly related to canopy structural attributes estimated from UAS image data and used to rank
Remote Sens. 2019, 11, 269 3 of 19
Remote Sens. 2018, 10, x FOR PEER REVIEW 3 of 19
avocado tree condition. Such a condition ranking strategy could play a role to bridge the gap between
the remote sensing expertise and farmers’ knowledge of their tree crops, delivering information able
to be used immediately as part of on farm management practices.
Materials and
2. Materials and Methods
Methods
2.1. Study
2.1. Study Sites
Sites
The study
The study site
site is
is one
one ofof the
the main
mainHassHassavocado
avocado producing
producing orchards
orchards in in Australia,
Australia, which
which isis located
located
to the
to thesouth
southofofBundaberg,
Bundaberg,Queensland,
Queensland, Australia.
Australia. TheThe region
region experiences
experiences a subtropical
a subtropical climateclimate
with
with long hot summers and mild winters. The post-harvest pruning usually
long hot summers and mild winters. The post-harvest pruning usually occurs in late Austral winter occurs in late Austral
winter (August)
(August) or earlyorspring
early (September),
spring (September), wherelimbs
where major majorare limbs are removed
removed to maintain
to maintain orchardorchard
access
access between rows and enhance light interception. Flowering occurs
between rows and enhance light interception. Flowering occurs between early September and mid-between early September
and mid-October,
October, followed by followed
two fruit bydrop
two fruit
eventsdrop events
usually usually
between latebetween
Octoberlate
andOctober
Januaryand January for
for readjusting
readjusting fruit load to fit the tree ecological resources [37]. Harvesting of avocado
fruit load to fit the tree ecological resources [37]. Harvesting of avocado normally occurs in May. normally occurs
The
in May. The UAS based focus areas encompassed a 1 ha patch of the avocado
UAS based focus areas encompassed a 1 ha patch of the avocado orchard, within which structural orchard, within which
structural parameters
parameters of 45 avocadoof 45 trees
avocadowere trees wereselected
evenly evenly selected and measured
and measured (Figure(Figure
1). The1).avocado
The avocado
trees
trees planted
were were planted
in 2005 inwith
2005awith a 5 m spacing.
5 m spacing. The average
The average elevation elevation for the avocado
for the avocado orchardorchard
was aroundwas
around 60 m above sea level, and it had relatively flat terrain with an average
60 m above sea level, and it had relatively flat terrain with an average downward slope of 4 degrees downward slope of
4 degrees towards
towards east. east.
(a) (b)
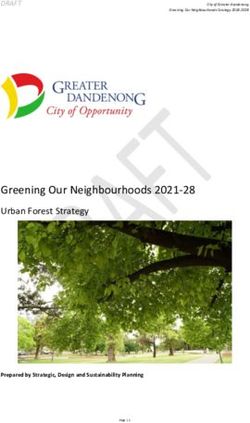
The (a)
Figure 1. The (a) outline
outline of
of the
the study
study area
area and
and (b)
(b) aerial
aerial view
view of
of the
the avocado
avocado orchard
orchard in
in Bundaberg,
Bundaberg,
Australia. The green
green dots
dots in
in(a)
(a)represent
representthe
theselected
selectedin-situ
in-situmeasured
measuredtrees. The
trees. TheAustralia
Australiabasemap in
basemap
(a)(a)
in uses imagery
uses imageryfrom World-View
from World-View 2 provided by by
2 provided DigitalGlobe.
DigitalGlobe.
2.2. Field
2.2. Field Data
Data
Field measurements
Field measurements were were collected
collected between
between 22 andand 66 February
February 2017,
2017, where
where the
the canopy
canopy becomes
becomes
dense at
dense at the
the end
end ofof summer
summer leaveleave flush
flush [38].
[38]. Tree
Tree height
height was
was measured
measured using
using aa TruPulse
TruPulse 360B
360B laser
laser
rangefinder (Laser Technology Inc, Centennial, USA) from the ground to the
rangefinder (Laser Technology Inc, Centennial, USA) from the ground to the tree apex at a distance tree apex at a distance
greater than
greater than 1010 m
m from
from the
the trunk
trunk to to reduce
reduce thethe effect
effect of
of tree
tree inclination
inclination [39]. Canopy widths
[39]. Canopy widths werewere
measured, in
measured, inthe
thedirection
directionalong
alongthethe
hedgerow,
hedgerow, as the
as horizontal distance
the horizontal between
distance the two
between thestaffs
twoplaced
staffs
at the outermost edge of each side of the tree crown.
placed at the outermost edge of each side of the tree crown.
PPC for
PPC for individual
individual trees
trees was
was estimated
estimated viavia aa digital
digital cover
cover photography
photography (DCP)
(DCP) method
method [21][21] using
using
aa Nikon
Nikon Coolpix
Coolpix AW120
AW120 digital
digital camera
camera (Nikon
(Nikon Corporation,
Corporation, Tokyo,
Tokyo, Japan). Eight representative
Japan). Eight representative
cover images were taken at various locations at approximately half
cover images were taken at various locations at approximately half way between the trunkway between the trunk andand the
the
outer edge
outer edge ofof the
the tree
tree crown
crown of of each
each tree
tree during
during dusk.
dusk. These
These images
images were
were imported
imported into
into the
the Can-Eye
Can-Eye
software (French National Institute of Agronomical research, Paris, France) to estimate gap fraction
to calculate PPC.
A total of 66 trees, selected based on their variability in condition, were visually assessed by an
avocado tree expert and classified into four condition categories: (1) Excellent, (2) Good, (3) Moderate,
Remote Sens. 2019, 11, 269 4 of 19
software (French National Institute of Agronomical research, Paris, France) to estimate gap fraction to
calculate PPC.
A total of 66 trees, selected based on their variability in condition, were visually assessed by an
Remote Sens. 2018, 10, x FOR PEER REVIEW 4 of 19
avocado tree expert and classified into four condition categories: (1) Excellent, (2) Good, (3) Moderate,
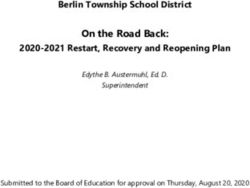
and (4)
and (4) Fair
Fair (Figure
(Figure 2),2), based
based on
on the
the modified
modified Ciba-Geigy
Ciba-Geigy scale
scale method
method for
for the
the Australian
Australian avocado
avocado
industry [33]. Twenty-two of the 66 assessed trees were part of the selected 45 trees, which
industry [33]. Twenty-two of the 66 assessed trees were part of the selected 45 trees, which had their had
their structural properties measured for validation purposes. The number of trees for
structural properties measured for validation purposes. The number of trees for each condition each condition
category can
category can be
be found
found inin Table
Table1.1.
(a) (b) (c) (d)
Figure 2.2. The
Thecondition
conditionranking
ranking
for for avocado
avocado treestrees
basedbased on farmers’
on farmers’ knowledge.
knowledge. The standard
The standard ranking
ranking method classifies
method classifies the trees the
intotrees into four categories:
four categories: (a) where
(a) Excellent, Excellent, where
there there
was no signwas no sign of
of defoliation;
defoliation;
(b) Good, with (b) few
Good, with leaves
wilting few wilting leaves
occurring; (c)occurring;
Moderate,(c) Moderate,
where where approximate
approximate oneof
one third to half third
the
to halfleaf
green of the green
tissues leafwilted;
were tissuesand
were
(d) wilted; and more
Fair, where (d) Fair,
thanwhere
half ofmore than half
the leaves wereofdead.
the leaves were
dead.
Table 1. Number of avocado trees classified in situ into respective condition rankings.
Table 1. Number of avocado
Ranking trees classified
1- Excellent in situ into
2- Good respective condition
3- Moderate 4- Fair rankings.
Count
Ranking 8
1- Excellent 21
2- Good 32
3- Moderate 5
4- Fair
Count 8 21 32 5
2.3. UAS Data Acquisition
2.3. UAS Data Acquisition
The multi-spectral UAS imagery was captured with a Parrot Sequoia®multi-spectral camera
TheDrone
(Parrot multi-spectral
SAS, Paris, UAS imagery
France) mountedwas captured
on a 3DR withSolo a(3DParrot Sequoia®
Robotics, multi-spectral
Berkeley, camera
USA) quadcopter
(Parrot Drone
under clear skySAS, Paris, France)
conditions. mounted
The camera on a 3DR
acquires Solo (3D
imagery Robotics,
in the Berkeley,
green (550 nm, 40USA) quadcopter
nm bandwidth),
under
red (660clear
nm,sky40 conditions.
nm bandwidth), The camera
red edge acquires imagery
(735 nm, 10 nm in bandwidth),
the green (550and nm,NIR40 nm
(790bandwidth),
nm, 40 nm
red (660 nm,part
bandwidth) 40 nm bandwidth),
of the spectrum with red its
edge × 3.6nm,
4.8(735 mm10(1280 × 960 pixels) and
nm bandwidth), CMOS NIRsensor.
(790 nm,
The 40 nm
image
bandwidth) part of the spectrum
acquisition parameters, i.e., flight with
height,its sidelap,
4.8 × 3.6andmmflight
(1280speed,
× 960 pixels) CMOS
etc., were sensor.
designed The on
based image
the
acquisition
suggestionsparameters,
from previous i.e.,studies
flight height,
[7,40,41]. sidelap, and was
The flight flightconducted
speed, etc.,
in were designed based
an along-tree-row on the
pattern at
suggestions
75 m AGL onfrom 2 Febprevious studies2:11-2:17
2017 between [7,40,41].PM The(60 ◦ solar
flight was conducted
elevation). Thein sidelap
an along-tree-row
of the imagespattern
was
at 75 m
80%, theAGL
imageoncapture
2 Feb 2017 between
interval was2:11-2:17 PM (60°
set to 1 second solar
(92% elevation).
forward The sidelap
overlap), and theofflight
the images
speed was
80%,
5 m/s.the image capture interval was set to 1 second (92% forward overlap), and the flight speed was
5 m/s.Ten AeroPoints®(Propeller Aerobotics Pty Ltd, Surry Hills, Australia) and eight gradient
panelsTen
inAeroPoints®
greyscale were (Propeller
deployed Aerobotics Pty Ltd,
for geometric andSurry Hills, Australia)
radiometric correctionand eight gradient
purposes, panels
respectively.
in greyscale
The locations were
of the deployed
AeroPointsfor geometric
were recordedand radiometric
for five hours andcorrection
subsequentlypurposes, respectively.
post-processed usingThe
the
locations of the AeroPoints
Propeller®network correction were recorded
based on the for five base
nearest hoursstation,
and subsequently
located within post-processed using site.
26 km of the study the
Propeller®
The network
calibration panelscorrection
were designedbasedbased
on theonnearest base station,
the suggestion located
of Wang and within 26 km
Myint [42]. ofreflectance
The the study
site. The calibration panels were designed based on the suggestion of Wang and Myint [42]. The
reflectance values of the calibration panels were measured with an ASD FieldSpec® 3 spectrometer
(Malvern Panalytical Ltd, Malvern, UK) and ranged from 4% to 92% in all spectral bands,
corresponding with the four bands of the Sequoia® camera (Figure 3).
Remote Sens. 2019, 11, 269 5 of 19
values of the calibration panels were measured with an ASD FieldSpec®3 spectrometer (Malvern
Panalytical Ltd, Malvern, UK) and ranged from 4% to 92% in all spectral bands, corresponding with
the four
Remote bands
Sens. of xthe
2018, 10, FORSequoia®camera
PEER REVIEW (Figure 3). 5 of 19
Figure 3. Spectral
Spectral reflectance of the eight greyscale radiometric calibration panels measured in-situ
with a field spectrometer and resampled
resampled to
to match
match the
the four
four Parrot
Parrot Sequoia®multi-spectral
Sequoia® multi-spectralbands.
bands.
2.4. Image
2.4. Image Pre-Processing
Pre-Processing
Agisoft PhotoScan
Agisoft PhotoScanPro Pro(Agisoft
(AgisoftLLC, St. St.
LLC, Petersburg, Russia)
Petersburg, was used
Russia) to process
was used the multi-spectral
to process the multi-
UAS data with the aid of an in-house Python script to optimise and automate
spectral UAS data with the aid of an in-house Python script to optimise and automate the process. the process. The key
point and tie point limits were set as 40,000 and 10,000 respectively for photo alignment.
The key point and tie point limits were set as 40,000 and 10,000 respectively for photo alignment. The The measured
ground control
measured groundpoints (GCPs)points
control derived(GCPs)
from thederived
AeroPoints®were
from the imported
AeroPoints®to geometrically
were importedcalibrate
to
and geo-reference the images. The geo-referencing root-mean-square error (RMSE)
geometrically calibrate and geo-reference the images. The geo-referencing root-mean-square error of the GCPs was
0.07 m. The
(RMSE) overall
of the GCPsprojection
was 0.07 error
m. The wasoverall
0.6 pixel based onerror
projection the bundle-adjustment
was 0.6 pixel basederror assessment
on the bundle-
report. The error
adjustment projection errors of
assessment tie points
report. were takenerrors
The projection into account to eliminate
of tie points poor-quality
were taken points,
into account to
and a noise filter was also applied to assure the quality of the final products. A
eliminate poor-quality points, and a noise filter was also applied to assure the quality of the finalmild noise filter was
applied during
products. A mild thenoise
pointfilter
cloud densification
was applied during process
the to keepcloud
point as many details onprocess
densification the treetostructure
keep as
as possible. The densified photogrammetric point clouds were then classified
many details on the tree structure as possible. The densified photogrammetric point clouds were to identify ground
then
points before generating both a digital surface model (DSM) and digital terrain model
classified to identify ground points before generating both a digital surface model (DSM) and digital (DTM). Before
ortho-rectifying
terrain model (DTM). images, colour
Before correction wasimages,
ortho-rectifying enabled to calibrate
colour the vignetting
correction was enabled effect and reduce
to calibrate the
brightness variation caused by variations in photographic parameters (e.g. ISO
vignetting effect and reduce brightness variation caused by variations in photographic parameters value, shutter speed,
etc.), ISO
(e.g. which cannot
value, be set
shutter to a constant
speed, valuecannot
etc.), which for thebeParrot
set toSequoia camera.
a constant valueOrthomosaics
for the Parrotwere also
Sequoia
produced
camera. with the colour
Orthomosaics balance
were option disabled
also produced with theto preserve the pixel
colour balance values
option as closetotopreserve
disabled the original
the
images as possible [41,43] (Figure 4).
pixel values as close to the original images as possible [41,43] (Figure 4).
2.5. Producing Analysis Ready Data
In order to estimate the tree height, we derived a canopy height model (CHM) by subtracting
the DTM from the DSM. For PPC, we used the brightness of red edge and NIR bands and a range of
vegetation indices based on the at-surface reflectance imagery from the orthomosaic. The brightness
is the direct output of image pre-processing, which was recorded in digital number (DN) and had
a strong causality with at-surface reflectance. At-surface reflectance imagery was created using a
simplified empirical correction based on the radiometric calibration panels, which was suggested by
previous studies [7,41,42], with the aid of an in-house Python script. However, the initial corrected
at-surface reflectance imagery appeared with some negative reflectance values due to shaded leaves
and perhaps inaccurate reflectance estimations from the panel [41]. Therefore, we manually delineated
the tree rows and calculated the zonal statistics within these regions to get the minimum value for
each band of each mosaic. These negative values were applied for dark feature subtraction [35] to
(a) (b)
Figure 4. The orthomosaics of the red edge band (a) without colour-balancing and (b) with colour-
balancing. The south part of the mosaic in (a) is darker than the north part, while such brightness
variation is less pronounced in (b). This phenomenon was caused by dynamic photographic
parameters and only occurred in the green and red edge bands in this case.
spectral UAS data with the aid of an in-house Python script to optimise and automate the process.
The key point and tie point limits were set as 40,000 and 10,000 respectively for photo alignment. The
measured ground control points (GCPs) derived from the AeroPoints® were imported to
geometrically calibrate and geo-reference the images. The geo-referencing root-mean-square error
(RMSE) of the GCPs was 0.07 m. The overall projection error was 0.6 pixel based on the bundle-
Remote Sens. 2019, 11, 269 6 of 19
adjustment error assessment report. The projection errors of tie points were taken into account to
eliminate poor-quality points, and a noise filter was also applied to assure the quality of the final
offset the A
products. pixel
mildvalues
noiseinfilter
the reflectance
was applied images
duringto the
make surecloud
point that most of the at-surface
densification process toreflectance
keep as
valuesdetails
many withinonthe thetree
treerows were as
structure positive andThe
possible. thedensified
spectral signature fitted thepoint
photogrammetric spectral characteristic
clouds were then
of vegetation.
classified Subsequently,
to identify the two
ground points at-surface
before reflectance
generating both a orthomosaics
digital surfacewere
modelused to generate
(DSM) the
and digital
following
terrain modelvegetation
(DTM). indices: (1) Normalisedimages,
Before ortho-rectifying Difference Vegetation
colour correctionIndex
was (NDVI),
enabled (2) Normalised
to calibrate the
Difference effect
vignetting Red Edgeand Index
reduce(NDRE),
brightness(3) variation
green NDVI (g-NDVI),
caused (3) Red in
by variations Edge Normalisedparameters
photographic Difference
Vegetation
(e.g. Index
ISO value, (RENDVI),
shutter speed,and (5)which
etc.), Greencannot
Chlorophyll
be set Index (ClGE) (Table
to a constant 2). the
value for These indices
Parrot were
Sequoia
selected Orthomosaics
camera. because they are commonly
were used in precision
also produced agricultural
with the colour applications
balance and have
option disabled to proven
preserveuseful
the
for estimating
pixel values as theclosebiomass and productivity
to the original images aswith a specific
possible degree
[41,43] of accuracy
(Figure 4). [12,18,36,44,45].
(a) (b)
The
Figure 4.4.The
Figure orthomosaics
orthomosaics of red
of the the edge
red edge
band band (a) without
(a) without colour-balancing
colour-balancing and (b)and
with(b) with
colour-
colour-balancing.
balancing. The south The south
part part
of the of theinmosaic
mosaic in (a) than
(a) is darker is darker than part,
the north the north
while part,
such while such
brightness
brightnessisvariation
variation is less pronounced
less pronounced in (b). in (b). phenomenon
This This phenomenon was was caused
caused byby dynamicphotographic
dynamic photographic
parameters and
parameters and only
only occurred
occurred inin the
the green
green and red edge bands in this case.
Table 2. Formulae of vegetation indices which were used in this study.
Vegetation Index Formula
R N IR − R Red
Normalised Difference Vegetation Index (NDVI) R N IR + R Red
R N IR − RGreen
Green Normalised Difference Vegetation Index (gNDVI) R N IR + RGreen
R Red edge − R Red
Red Edge Normalised Difference Vegetation Index (RENDVI) R Red edge + R Red
R N IR − R Red edge
Normalised Difference Red Edge Index (NDRE) R N IR + R Red edge
R N IR
Green Chlorophyll Index (ClGE) RGreen − 1
Rband represents the reflectance of specific bands.
2.6. Individual Tree Crown Delineation and Structural Attribute Estimation
To delineate individual trees, tree rows were first delineated with geographic object-based image
analysis (GEOBIA) using the eCognition Developer software (Trimble, Munich, Germany). The initial
segmentation was conducted using the multiresolution segmentation algorithm [46] based on the
CHM, NDVI, NIR and red bands (Figure 5). The NDVI and NIR bands are commonly used to delineate
vegetation [7,47,48]. The reason we also selected the red band as one of the inputs was that the ground
material is mostly red dirt, creating contrast between trees and the ground. Initially, parts of the tree
crowns were distinguished with segments that had CHM values greater than 3 m. Those segments were
then grown progressively outwards until CHM ≤ 0.3 m and NDVI ≤ 0.1. At this stage, the delineated
tree crown extent excluded significant within-crown gaps and left them as unclassified segments
which were enclosed by tree crown segments. For gap fraction analysis purposes, such unclassified
segments were included as part of the tree crown, if they were surrounded by already classified tree
Remote Sens. 2019, 11, 269 7 of 19
crown objects. All the tree segments were eventually merged to create the extent shapefile of tree rows
(Figure 5).
Remote Sens. 2018, 10, x FOR PEER REVIEW 7 of 19
Figure 5.
Figure 5. The workflow of individual
individual tree
tree delineation
delineationand
andattribute
attributeextraction.
extraction.
Once
Oncethethetree
treerows
rowshadhadbeen
beendelineated,
delineated,thethenext
nextstep
stepwas
was totoidentify individual
identify individual tree crowns
tree crowns forfor
the
theselected
45 45 selected
trees,trees,
whichwhich had measured
had been been measured in theasfield,
in the field, well asas well astrees
the 66 the 66thattrees
had that
theirhad their
condition
condition
ranked. ranked.the
Because Because thebeen
trees had treespruned
had been pruned mechanically
mechanically and many and of themany
tree of the tree
crowns crowns
overlapped
overlapped
with with tree
the adjacent the adjacent
crowns, ittree
wascrowns, it wasto
not possible not possiblethem
separate to separate them automatically
automatically based on height based
and
on height
spectral and spectral
information. information.
Therefore, Therefore,
we visually we visually
delineated delineated
the 45 individualthetree
45 individual
crowns based treeoncrowns
visual
based on visual
interpretation interpretation
of the orthomosaics of and
the knowledge
orthomosaics and location
of tree knowledge and of tree location
planting distance. and planting
Some of the
distance. Some
overlapping crownof the overlapping
areas were split crown
in halfareas
whenwere splitextents
the real in halfwere
when notthe real extents
visually were not
distinguishable.
visually distinguishable.
Nevertheless, this methodNevertheless, this method
kept the majority kept the
of the extent of majority
individualof the
treeextent
crowns, of individual tree
hence reducing
crowns, hence reducing bias in the comparison with field-derived PPC information.
bias in the comparison with field-derived PPC information. Although the proposed GEOBIA method Although the
proposed
could GEOBIA
not further methodindividual
delineate could not neighbouring
further delineate treesindividual
within tree neighbouring
rows, it reducedtrees the
within tree
potential
rows, it reduced the potential error and processing time caused
error and processing time caused by manual delineation of tree row extent. by manual delineation of tree row
extent.
The semi-automatically delineated individual tree crown extents were used as the final objects
to extract individual tree crown parameters. Tree height was estimated by the maximum CHM value
within each object to correspond to field measurements. Crown width and length, which represented
the horizontal diameter of the tree crown in the direction along and perpendicular to the hedgerows,
Remote Sens. 2019, 11, 269 8 of 19
The semi-automatically delineated individual tree crown extents were used as the final objects to
extract individual tree crown parameters. Tree height was estimated by the maximum CHM value
within each object to correspond to field measurements. Crown width and length, which represented
Remote Sens. 2018, 10, x FOR PEER REVIEW 8 of 19
the horizontal diameter of the tree crown in the direction along and perpendicular to the hedgerows,
respectively,was
respectively, wascalculated
calculatedusing
usingthethewidth
widthandandlength
lengthofofthe
theminimum
minimumrectangle
rectanglethat
thatcovered
coveredeacheach
crown extent
crown extent (Figure
(Figure6a). Crown
6a). Crown length for each
length for tree
eachwas also
tree manually
was measuredmeasured
also manually from the orthomosaic
from the
for comparison with the calculated length using the GEOBIA
orthomosaic for comparison with the calculated length using the GEOBIA method.method. The mean, standard Thedeviation,
mean,
and Haralick
standard textureand
deviation, greyHaralick
level co-occurrence
texture greymatrix
level (GLCM) [7,46,49–52],
co-occurrence matrix including
(GLCM) homogeneity,
[7,46,49–52],
dissimilarity,
including contrast, and
homogeneity, standard contrast,
dissimilarity, deviation,and were extracted
standard for thewere
deviation, red edge brightness,
extracted NIR
for the red
brightness, and five vegetation indices (Table 2) and exported for further analysis.
edge brightness, NIR brightness, and five vegetation indices (Table 2) and exported for further These image-derived
parameters were then compared to field measurements, and their to
coefficient of determination 2 ) of
analysis. These image-derived parameters were then compared field measurements, and (Rtheir
linear regressions
coefficient and RMSE (R
of determination were
2) ofcalculated to assess their
linear regressions andcorrelation
RMSE were andcalculated
accuracy attothe tree crown
assess their
object level.
correlation and accuracy at the tree crown object level.
(a) (b)
Figure
Figure6.6.The
Thedelineated
delineatedtreetreeextent
extentfor
forthe
the4545selected
selectedtrees
treesthat
thathad
hadin-situ
in-situstructural
structuralmeasurements
measurements
and
andthe
the6666trees
treesthat
thathadhadon-ground
on-groundcondition
conditionevaluation.
evaluation.The Therectangles
rectangleswhich
whicharearehighlighted
highlightedinin
greeninin(a)
green (a)represent
representthe theminimum
minimumrectangle
rectangletotomeasure
measurecrown
crownwidth
widthand
andlength,
length,representing
representingthethe
horizontaldistance
horizontal distance in the
the direction
directionalong
alongandandperpendicular
perpendicular to the
to hedgerow,
the hedgerow, respectively. The yellow
respectively. The
highlighted
yellow trees intrees
highlighted (b) include the 22 trees
in (b) include fortrees
the 22 which
fortree crown
which treewere
crowncondition ranked and
were condition measured
ranked and
structure structure
measured in field. in field.
2.7. Canopy Condition Ranking
2.7. Canopy Condition Ranking
After finishing the accuracy assessment of the extracted structural attributes, only the variables
After finishing the accuracy assessment of the extracted structural attributes, only the variables
such as the maximum CHM value, average pixel value and texture from spectral bands and vegetation
such as the maximum CHM value, average pixel value and texture from spectral bands and
indices, which were highly correlated with the field measurements, were selected for the condition
vegetation indices, which were highly correlated with the field measurements, were selected for the
ranking classification of the 66 field assessed trees (Figure 6b), using a parallel random forest
condition ranking classification of the 66 field assessed trees (Figure 6b), using a parallel random
classifier [53] with the aid of an in-house Python script. For the random forest classification, 80% of
forest classifier [53] with the aid of an in-house Python script. For the random forest classification,
the 66 avocado trees were selected randomly to train the classifier with the aforementioned selected
80% of the 66 avocado trees were selected randomly to train the classifier with the aforementioned
variables as training features and the condition ranking as training labels. Every time the classifier was
selected variables as training features and the condition ranking as training labels. Every time the
trained, it randomly picked a number of training features that equalled the square root of total number
classifier was trained, it randomly picked a number of training features that equalled the square root
of features to grow the tree. The accuracy of the trained classifier was estimated using out-of-bag
of total number of features to grow the tree. The accuracy of the trained classifier was estimated using
error that was calculated by the bootstrap aggregating (bagging) predictor, which is the method for
out-of-bag error that was calculated by the bootstrap aggregating (bagging) predictor, which is the
generating random subsets that have a uniform probability of each label and with replacement for
method for generating random subsets that have a uniform probability of each label and with
prediction [53,54]. The classifier was trained repeatedly 300 times with different random subsets to
replacement for prediction [53,54]. The classifier was trained repeatedly 300 times with different
allow nodes to grow until the out-of-bag error was stable [55]. The trained random forest classifier
random subsets to allow nodes to grow until the out-of-bag error was stable [55]. The trained random
was then used to predict the condition ranking for all 66 trees based on the extracted variable sets.
forest classifier was then used to predict the condition ranking for all 66 trees based on the extracted
The prediction was compared with the in-field condition ranking to generate a confusion matrix
variable sets. The prediction was compared with the in-field condition ranking to generate a
confusion matrix to assess the model accuracy. The relative importance of the features used as
decision nodes was calculated by averaging the probabilistic predictions, which were estimated by
the mean decrease impurity method, to decrease the variance as well as bias [56,57].
Remote Sens. 2019, 11, 269 9 of 19
to assess the model accuracy. The relative importance of the features used as decision nodes was
calculated by averaging the probabilistic predictions, which were estimated by the mean decrease
Remote Sens. 2018, 10, x FOR PEER REVIEW 9 of 19
impurity method, to decrease the variance as well as bias [56,57].
3. Results
3. Results
3.1. 3.1. Accuracy
Accuracy of CHM-Derived
of CHM-Derived TreeTree Height
Height
TheThe maximum
maximum value
value of the
of the UAS-derived
UAS-derived CHM CHM waswas extracted
extracted for for
the the individual
individual trees
trees andand
compared against the field-based tree height measurements. The result shows that the CHM hadhad
compared against the field-based tree height measurements. The result shows that the CHM a a
positive
positive correlation
correlation withwith the field-derived
the field-derived tree height
tree height and produced
and produced a coefficient
a coefficient 2
of determination
of determination (R )
(R2)using
of 0.65 of 0.65 using model
a linear a linear(Figure
model7).(Figure
Of the7).
45Of themeasured,
trees 45 trees measured,
the averagethefield-derived
average field-derived
tree heighttree
washeight was
8.7 m (n 8.7 m
= 45), (n =the
while 45),average
while the average CHM-derived
CHM-derived tree8.4
tree height was height was
m. The 8.4 m.
RMSE of The RMSE of the
the estimated
treeestimated
height was tree
0.5height
m. Thewas 0.5 m. The
average tree average
height wastreeslightly
height was slightly underestimated
underestimated using the CHM-
using the CHM-derived
derived
method method
possibly duepossibly due to the inaccuracies
to the inaccuracies of 3D reconstruction
of 3D reconstruction on some branches.
on some branches.
Figure 7. Scatter plot and the linear regression of tree height. Blue dots appearing above and below the
Figure 7. Scatter plot and the linear regression of tree height. Blue dots appearing above and below
1:1 line represent a UAS-based under- and overestimation of the tree height, respectively.
the 1:1 line represent a UAS-based under- and overestimation of the tree height, respectively.
3.2. Accuracy of Image-Derived Crown Width and Length
3.2. Accuracy of Image-Derived Crown Width and Length
The correlation between the image-derived and field measured canopy width was low, because of
The correlation
the overlapping canopiesbetween
and lackthe
of image-derived
height variationand field measured
between canopy width
them, preventing accuratewas low, because
delineation
of edges
of the the overlapping canopies and
between neighbouring tree lack
crowns of from
heightthevariation
CHM andbetween them, preventing
spectral imagery. From Figure accurate
8a,
delineation of the edges between neighbouring tree crowns from the CHM
we can tell that there is no correlation between the measured canopy width and image-derived canopy and spectral imagery.
From
width. Figureof8a,
Because welimitation
this can tell that there isthe
to estimate nocanopy
correlation
width between the measured
accurately, canopy
it is not feasible width
to use theand
image-derived
estimated canopy
canopy width aswidth. Because
an indicator of of this
tree limitation to estimate the canopy width accurately, it is
condition.
not
Thefeasible to useofthe
estimation estimated
crown lengthcanopy
using width
a linearasmodel
an indicator
had a of
R2tree condition.
value of 0.88 compared to the
manually The estimation
measured of crown
length using length using a linear
the orthomosaic model
(Figures had 8b).
6a and a R From
2 valueFigure
of 0.888b,compared to the
we can tell
that there was an outlier in the scatter plot, which was caused by a branch of sparse leaves that failedcan
manually measured length using the orthomosaic (Figure 6a and Figure 8b). From Figure 8b, we
tell that there
reconstructed withwas an Therefore,
SfM. outlier in the scatter
it was plot, which
excluded from thewasstatistical
caused by a branch
analysis. Theof average
sparse leaves
of thethat
failed reconstructed
manually measured canopy withlength
SfM. Therefore,
was 8.45 m it (n
was excluded
= 45), whilefrom the statistical
the average analysis. The
of the calculated average
canopy
of the manually measured canopy length was 8.45 m (n = 45), while the
length based on the semi-automatic delineation results was 8.32 m. The calculated canopy length average of the calculated
wascanopy length based
underestimated on theofsemi-automatic
for most the trees with delineation
an RMSE atresults0.2 m,was 8.32 m.
because theThe
leavescalculated canopy
at the edge
length was
of canopy wereunderestimated
usually sparse and for most
henceofnotthewell-reconstructed
trees with an RMSE withat SfM.
0.2 m,Thebecause the leaves
tree canopies at the
were
edge of canopy were usually sparse and hence not well-reconstructed with
pruned mechanically so that the edge of canopies in the direction along the hedgerow aligned very SfM. The tree canopies
were
well. pruned
Hence, mechanically
the canopy length so that the edge
is dictated by theofpruning
canopies in thethan
rather direction
the realalong the hedgerow
condition aligned
of individual
very well. Hence, the canopy length is dictated by the pruning rather than the real condition of
individual tree crowns. While the pruning effects prevent measured length from being used as an
indicator of tree condition, tree crown length and gap length between hedgerows can still provide
useful information for future pruning operations and management purposes.
Remote Sens. 2019, 11, 269 10 of 19
tree crowns. While the pruning effects prevent measured length from being used as an indicator of tree
condition, tree crown length and gap length between hedgerows can still provide useful information
for future pruning
Remote Sens. operations
2018, 10, and
x FOR PEER management purposes.
REVIEW 10 of 19
(a)
(b)
Figure
Figure 8. Scatter
8. Scatter plotplot
andand linear
linear regression
regression of canopy
of (a) (a) canopy width
width in the
in the direction
direction along
along the the hedgerow,
hedgerow,
andand (b) canopy
(b) canopy length
length in direction
in the the direction perpendicular
perpendicular to hedgerow.
to the the hedgerow.The The outlier
outlier in caused
in (b) (b) caused
by aby a
branch
branch of sparse
of sparse leaves
leaves at lower
at the the lower
partpart
of a of a tree
tree was was not taken
not taken into into account
account inlinear
in the the linear regression.
regression.
3.3. 3.3.
PPCPPC
Correlation
Correlation
Figure 9 shows
Figure the the
9 shows different R2 values
different for for
R2 values the the
PPCPPCregression between
regression andand
between fieldfield
derived PPCPPC
derived
values and and
values different spectral
different indicators,
spectral including
indicators, the brightness
including of the red
the brightness edge
of the redand NIR
edge andbands
NIRand fiveand
bands
vegetation indices and texture bands, with and without colour correction. Colour correction
five vegetation indices and texture bands, with and without colour correction. Colour correction improved
the improved
observed relationship
the observed of image derivedofstructure
relationship values to
image derived ground measurements.
structure values to ground Comparing the
measurements.
results derived with and without colour correction, the R 2 value using the vegetation indices showed
Comparing the results derived with and without colour correction, the R value using the vegetation
2
higher variation
indices showed between
higherthe two radiometric
variation corrections
between the than the corrections
two radiometric red edge and NIR
than theband
red brightness.
edge and NIR
Theband
PPC correlation
brightness.among
The PPC all correlation
the indicators was highest
among when integrating
all the indicators mean,
was highest standard
when deviation
integrating mean,
standard deviation (Stdev), and the four Haralick texture GLCMs for multi-variate linear regression.
The input of Haralick texture GLCM improved the R2 value more than the standard deviation, except
for the use of the NIR brightness. The R2 value using the mean of NIR brightness was 0.38 without
colour correction but increased to 0.42 with colour correction. With the extra input of standard
deviation and four Haralick texture GLCMs, the R2 value increased to 0.59 and 0.61 for the NIRRemote Sens. 2019, 11, 269 11 of 19
(Stdev), and the four Haralick texture GLCMs for multi-variate linear regression. The input of Haralick
texture GLCM improved the R2 value more than the standard deviation, except for the use of the NIR
brightness. The R2 value using the mean of NIR brightness was 0.38 without colour correction but
increased to 0.42 with colour correction. With the extra input of standard deviation and four Haralick
texture
Remote GLCMs,
Sens. 2018, 10, the
x FORR2PEER
value increased to 0.59 and 0.61 for the NIR brightness using multi-variate
REVIEW 11 of 19
linear regression without and with colour correction, respectively. When used to explain the variation
When
in PPC,used
NDVI to had
explain the the variation
second highestin RPPC, NDVI
2 value had the
without second
colour highestand
correction R2 the
value without
highest colour
R2 of 0.62
correction and the highest R 2 of
2 0.62 with colour correction. The R 2 value using
with colour correction. The R value using the mean NDVI value without colour correction was 0.31the mean NDVI value
without colour to
and improved correction
0.54 when was 0.31standard
both and improved to 0.54
deviation andwhen both
texture standard deviation
information and texture
were added. On the
information
other hand, an wereR added.
2 On the
of 0.56 was other hand,
achieved usingan R the
only2 of 0.56
meanwas achieved
NDVI valueusing
with only
colourthe mean NDVI
correction per
value with colour correction per tree crown, whereas this value was increased to
tree crown, whereas this value was increased to 0.62 when including both standard deviation and 0.62 when including
both standard
texture deviation and texture information.
information.
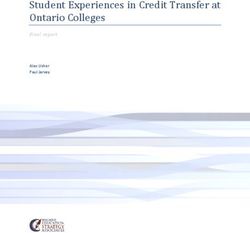
Figure 9. The R22 value
value of
of the
the linear
linear correlation
correlation between
between field
field measured
measured PPC and different spectral
images, including
includingthe
thebrightness
brightnessofof
thethe
redred
edge andand
edge NIRNIR
bands and five
bands andvegetation indices.
five vegetation Each colour
indices. Each
represents
colour the different
represents combination
the different of input
combination including
of input mean,mean,
including standard deviation
standard (Stdev),
deviation and four
(Stdev), and
texture GLCMs (Texture). The bars on the left and right sides of the graph were produced
four texture GLCMs (Texture). The bars on the left and right sides of the graph were produced for the
orthomosaics without and with colour correction, respectively.
respectively.
3.4. Tree
3.4. Tree Condition
Condition Prediction
Prediction
The mean,
The mean,standard
standarddeviation,
deviation, andandfour Haralick
four Haralicktexture GLCMs
texture GLCMs of theofNIR
thebrightness and NDVI,
NIR brightness and
derived from the colour-corrected orthomosaic, were extracted for the
NDVI, derived from the colour-corrected orthomosaic, were extracted for the 66 trees. CHM-derived 66 trees. CHM-derived tree
height
tree was was
height also also
selected as one
selected as of
onethe offeatures for predicting
the features tree condition.
for predicting The prediction
tree condition. results
The prediction from
results
from both NIR and NDVI classifiers were identical (Figures 10 and 11). The seven-feature classifiera
both NIR and NDVI classifiers were identical (Figures 10 and 11). The seven-feature classifier had
higher
had tree condition
a higher prediction
tree condition accuracyaccuracy
prediction than the than
two-feature classifier for
the two-feature both the
classifier forNIR
both brightness
the NIR
and NDVI.and
brightness BothNDVI.
classifiers
Both which usedwhich
classifiers sevenused
features
seven had the accuracy
features had theof 98.48%,of
accuracy while the result
98.48%, while
based
the on based
result two features
on two produced an accuracy
features produced of 96.97%.
an accuracy In oneIn
of 96.97%. and
onetwoandcases for the
two cases forseven and
the seven
two-feature classifiers, respectively, the trees were mapped as moderate condition,
and two-feature classifiers, respectively, the trees were mapped as moderate condition, while ranked while ranked in the
field
in theasfield
fair as
condition.
fair condition.
The feature importance
The feature importance orderorderwas wasdifferent
differentbetween
betweenthe theNIR
NIRandandNDVINDVIclassifiers
classifiers(Tables
(Tables 3 and 4).
3 and
TheThe
4). variables
variables enabling
enabling thethe
greatest
greatest discrimination
discriminationfor forboth
bothclassifiers
classifierswere
werethe themean
mean value, texture
value, texture
GLCM standard deviation, and the CHM-derived tree height, with
GLCM standard deviation, and the CHM-derived tree height, with their combination providing more their combination providing
more50%
than thanprobability
50% probability of prediction.
of prediction. While the While
mean thevalue
meanwas value
the was the top
top one onefor
feature feature
both for
the both
NIR
the NIR
and NDVI andclassifiers,
NDVI classifiers,
the NDVI theclassifier
NDVI classifier
relied on relied
the on the mean
mean value value
slightly slightly
more more
than than
the NIRthe
NIR classifier for predicting tree condition, which was 22.30% compared
classifier for predicting tree condition, which was 22.30% compared to 19.76%. The second and third to 19.76%. The second and
third important
most most importantfeaturesfeatures
for thefor
NIR theclassifier
NIR classifier
were the were the CHM-derived
CHM-derived tree (18.39%)
tree height height (18.39%)
and GLCM and
GLCM standard
standard deviation deviation
(14.62%),(14.62%), respectively,
respectively, while thewhile
orderthefororder
the NDVIfor the NDVI was
classifier classifier was the
the opposite,
opposite, with the GLCM standard deviation and CHM-derived
with the GLCM standard deviation and CHM-derived tree height explaining 17.31% and 15.71%tree height explaining 17.31% and
15.71% probability,
probability, respectively.
respectively. In otherIn other the
words, words,
NIR the NIR classifier
classifier relied less relied
on thelessspectral
on the spectral and
and textural
information compared to the NDVI classifier, which may be because the NIR brightness contains
shadow-induced noise, which means that its derivatives may not properly reflect the actual canopy
condition.Remote Sens. 2019, 11, 269 12 of 19
textural information compared to the NDVI classifier, which may be because the NIR brightness
contains shadow-induced noise, which means that its derivatives may not properly reflect the actual
Remote
canopySens. 2018, 10, x FOR PEER REVIEW
condition. 12 of 19
(a)
(b)
Figure
Figure10.10. The
The confusion matrix and
confusion matrix andout-of-bag
out-of-bagaccuracy
accuracyofofthe
the random
random forest
forest classification
classification for for
the the
tree
condition
tree prediction
condition basedbased
prediction on theon
CHM-derived tree height
the CHM-derived tree and (a) NIR-related
height features, including
and (a) NIR-related features,
the mean,the
including standard
mean, deviation, and four Haralick
standard deviation, and fourtexture GLCMs;
Haralick and
texture (b) predicted
GLCMs; and (b)PPC using all
predicted PPCthe
six NIR-related
using all the six features. Thefeatures.
NIR-related conditionThe
ranking fromranking
condition one to four
fromrepresents condition
one to four fromcondition
represents excellent
to fair.
from excellent to fair.
Table 3. The feature importance of each classifier using CHM-derived tree height and NIR-brightness-
Table 3. The feature importance of each classifier using CHM-derived tree height and NIR-brightness-
related features.
related features.
Classifier Feature Feature Importance
Classifier Feature Feature Importance
Mean
Mean NIR NIR 19.76%
19.76%
CHM-derived tree height 18.39%
CHM-derived tree height
GLCM Standard deviation
18.39%
14.62%
GLCM
7-features classifier (Figure 10a) Standard deviation
GLCM contrast 14.62%
12.77%
7-features classifier
GLCM contrast
GLCM dissimilarity 12.77%
12.06%
(Figure 10a)
GLCM Standard deviation
dissimilarity 11.59%
12.06%
GLCM homogeneity 10.81%
Standard deviation 11.59%
CHM-derived tree height 51.16%
2-features classifier (Figure 10b)GLCM homogeneity 10.81%
NIR-derived PPC 48.84%
2-features classifier CHM-derived tree height 51.16%
(Figure 10b) NIR-derived PPC 48.84%Remote Sens. 2019, 11, 269 13 of 19
Remote Sens. 2018, 10, x FOR PEER REVIEW 13 of 19
(a)
(b)
Figure
Figure11. The confusion
11.The confusion matrix andand out-of-bag
out-of-bagaccuracy
accuracyofofthe
therandom
random forest classification
forest for for
classification the the
tree
condition
tree prediction
condition basedbased
prediction on theonCHM-derived tree height
the CHM-derived tree and (a) NDVI-related
height features, including
and (a) NDVI-related features,
the mean,the
including standard
mean, deviation, and four Haralick
standard deviation, and fourtexture GLCMs;
Haralick textureand (b) predicted
GLCMs; and (b)PPC using all
predicted PPC the
six NDVI-related features. The condition ranking from one to four represents condition from
using all the six NDVI-related features. The condition ranking from one to four represents condition excellent
to fair.
from excellent to fair.
Table 4. The feature importance of each classifier using CHM-derived tree height and NDVI-related
Table 4. The feature importance of each classifier using CHM-derived tree height and NDVI-related
features.
features.
Classifier Feature Feature Importance
Classifier Feature Feature Importance
Mean NDVI 22.30%
Mean NDVI 22.30%
GLCM standard deviation 17.31%
GLCM standard deviation
CHM-derived tree height 17.31%15.71%
CHM-derived
7-features classifier (Figure 11a) tree deviation
Standard height 15.71%12.96%
7-features classifier GLCM homogeneity
Standard deviation 12.96%10.81%
(Figure 11a) GLCM contrast
GLCM homogeneity 10.81%10.75%
GLCM dissimilarity 10.16%
GLCM contrast 10.75%
CHM-derived tree height
2-features classifier (Figure 11b)GLCM dissimilarity 10.16%51.44%
NDVI-derived PPC 48.56%
2-features classifier CHM-derived tree height 51.44%
(Figure 11b) NDVI-derived PPC 48.56%
4. Discussion
The average tree height was underestimated with the CHM-derived method. A similar
phenomenon was also observed in previous studies of lychee and olive trees [7,8], and may beYou can also read