Exploring Mathematics with Curvagon Tiles - arXiv
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Exploring Mathematics with Curvagon Tiles
Hanne Kekkonen
EEMCS, Delft University of Technology, Netherlands; h.n.kekkonen@tudelft.nl
arXiv:2208.00419v1 [math.HO] 31 Jul 2022
Abstract
Building blocks and tiles are an excellent way of learning about geometry and mathematics in general. There are
several versions of tiles that are either snapped together or connected with magnets that can be used to introduce
topics like volume, tessellations, and Platonic solids. However, since these tiles are made of hard plastic, they are not
very suitable for creating hyperbolic surfaces or shapes where the tiles need to bend. Curvagons are flexible regular
polygon building blocks that allow you to quickly build anything from hyperbolic surfaces and tori to dinosaurs and
shoes. They can be used to introduce mathematical concepts from Archimedean solids to Gauss-Bonnet theorem.
You can also let your imagination run free and build whatever comes to mind.
1 Introduction
Introducing new and surprising concepts to students is a good way to get them excited about mathematics. One
of these concepts is non-Euclidean geometry. Since we live on a globe, spherical geometry is quite intuitive to
many but it also offers a couple of surprises because most people have only encountered Euclidean geometry
in school. An even more interesting topic is hyperbolic geometry of surfaces with a constant negative
curvature. Both of these concepts can be introduced using polygon tilings. One way to approximate a sphere
is to start with a pentagon and surround it with five hexagons. When continued, this pattern creates the
traditional football approximation of the sphere (truncated icosahedron), as shown in Figure 1. To create an
approximation of a hyperbolic plane, where every point is a saddle point, we can start with a heptagon instead
of a pentagon and surround it with seven hexagons. This ‘hyperbolic football’ model has the advantage that,
while the model is curved, each polygon is flat and so you can draw straight lines on it. For more details see
[4, 6]. In the model introduced by Keith Henderson, the polygons are printed on paper, cut, and then taped
together. I really liked the idea and tested the model in a couple of hands-on outreach events, but noticed that
many students struggled to build a sufficiently large model during the time that was reserved for the activity.
Figure 1: ‘Football’ tiling models of the hyperbolic plane, Euclidean plane, and sphere using Curvagons.
Inspired by the paper version of the hyperbolic football, I wanted to create building blocks that could be
used to quickly create surfaces with negative curvature. The building blocks should be flexible allowing the
surface to bend naturally and the connection mechanism should be symmetric since half of the polygons have
odd number of sides. The result is Curvagons; flexible regular polygon tiles (all angles and edges identical)
that are interlocked together to create a supple surface that can be bent and twisted smoothly. These tiles
can be made with a cutting machine from different materials depending on the intended use. Tiles made
from EVA (ethylene-vinyl acetate) craft foam can be used in a classroom to build everything from hyperbolic
surfaces to dinosaurs. You can also use narrow tape to create straight lines, which allows further exploration
of hyperbolic geometry, as shown in Figure 3. Tear-resistant paper and paper-like materials, e.g. leather
paper, can be used to create durable models that can be drawn on with a normal pencil, as shown in Figure 2.
2 Mathematics with Curvagons
2.1 Non-Euclidean Geometry
Consider six equilateral triangles meeting at a vertex. Since the angles of
a triangle add up to 180° in Euclidean geometry the internal angles of an
equilateral triangle are 60° and six of them add up to 360° (or equivalently
2π radians) creating a flat surface, as shown in Figure 2. If you instead
place five triangles at a vertex, the surface will curve towards itself, and
if continued, close creating a crude approximation of a sphere called
icosahedron. The amount by which the sum of the angles at a vertex falls
short of 360° is called angle defect. For the icosahedron, this shortfall is
60° since one triangle is missing. We can also approximate the hyperbolic
plane by putting seven equilateral triangles at a vertex, creating a {3, 7}
polyhedral model. This model of the hyperbolic plane is rather wrinkly
due to the −60° angle defect which we from now on call 60° angle excess.
The hyperbolic plane looks locally like the Euclidean plane meaning that Figure 2: Tilings made from
we can get smoother approximations of it using tessellations where the SnapPap Curvagons.
angle excess is small. One of these models is the ‘hyperbolic football’
tessellation described in the Introduction, where the angle excess in every vertex is only 84/7°.
Notice that while the plane is flat, the sphere and the hyperbolic plane curve. Looking at the model of
the hyperbolic plane, we see that it creates a saddle shape and we can find orthogonal directions with largest
curving. One of these curves looks like a hill while the other one looks like a valley, as shown in Figure
3. To distinguish hills from valleys we can consider one of them as having positive curvature and the other
Figure 3: One of the largest curves on a saddle shape looks like a hill (red) while the other one looks like a
valley (blue). For a sphere both of the curves are either hills or valleys.
2
one as having negative curvature. We call these maximum and minimum values of curvature the principal
curvatures. If we do the same for the sphere, we notice that both of the lines curve in the same direction and
are the same size, therefore the maximum and minimum curvature are the same. The Gaussian curvature,
that describes how a surface curves at a point, is given as the product of the two principal curvatures. So
the hyperbolic plane has negative Gaussian curvature while spheres have positive Gaussian curvature. The
curvature of a circle is simply given by 1/R, where R is the radius of the circle, and so the curvature of a
sphere is 1/R2 . This means that larger spheres have smaller curvature, as we would expect. Similarly, the
milder the saddle shape of the hyperbolic plane, the closer the curvature is to zero.
Many of the fundamental truths you learn in school are not true
when you leave the Euclidean plane. For example, on a hyperbolic
surface the angles of a triangle add up to less than 180°, a line
has infinitely many parallel lines through a given point, and the
circumference of a circle is more than 2πR. Also, even though
a hyperbolic surface is larger than the flat plane you cannot draw
arbitrarily large triangles on them. This might seem unintuitive
at first but becomes clear if you study how parallel lines behave
on hyperbolic surfaces. You can draw a straight line on an EVA
foam ‘hyperbolic football’ model by gently straightening it along a
line with a ruler and tracing the line using a narrow tape. You can
then straighten the model along another line that does not cross the
original line. You will notice that the lines are closest to each other
at one point but diverge in both directions, as shown in Figure 4.
Figure 4: Diverging parallels on an If you start drawing a very large triangle you will notice that this
EVA foam Curvagon model. is not possible because the lines never meet. They might seem to
converge at first but after reaching a certain point, where they are
closest to each other, they start diverging again. The largest triangle you can draw on a hyperbolic plane is
called the ideal triangle and the sum of its angles is zero. Notice that even though the ideal triangle has finite
area its endpoints stretch to infinity so drawing one would be rather challenging. For other models introducing
hyperbolic geometry see [5] and for more in-depth introduction to curvature and hyperbolic geometry see
e.g. [3, 7]. You can find other hyperbolic geometry activities for the hyperbolic football from [6].
2.2 Gauss-Bonnet Theorem
Spheres and hyperbolic surfaces have the same Gaussian curvature every-
where, which is why we say that they have constant curvature. Since they
look the same at every point they can be easily approximated using simple
tessellations as described above. But how about less regular shapes? We
start by considering a torus. If you put your finger on the outer edge of a
torus, you will notice that the surface curves away from your hand, much
like a sphere does, as shown in Figure 5. These points on the outer edge
have positive Gaussian curvature. If you put your finger on the inner circle
of the torus, the surface curves away from your hand in one direction
but in the other direction it curves towards it, creating a saddle shape.
This region has negative Gaussian curvature. If you place the torus on a Figure 5: A torus has re-
table, you can see that on the very top and bottom, between the regions of gions with positive (red), neg-
positive and negative curvature, there is a circle that lies perfectly flat and ative (blue) and zero curvature
hence has zero curvature. So, to approximate a torus we need to create a (purple).
tessellation with angle excess in the middle and angle defect on the outer
edge. But how much excess and defect should we have?
3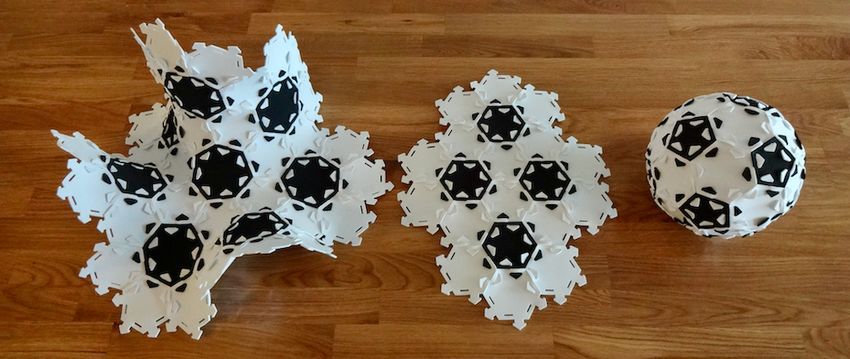
Here we can consider several more complex mathematical con-
cepts with advanced students. One of these is the Euler characteristic
which describes the shape or structure of a topological space regard-
less of the way it is bent. We first consider shapes without a boundary
like the torus and sphere. The Euler characteristic is then given by
χ = vertices − edges + f aces which was later proven to equal to
χ = 2 − 2 ∗ genus. Genus is the number of doughnut-like holes on
the surface. Thus a sphere has genus zero, a torus (and a coffee cup)
has genus one, and a double torus has genus two. Since a torus has
genus one, its Euler characteristic is zero. The approximation of a
torus in Figure 6 consists of 2 ∗ 9 triangles, 3 ∗ 9 squares and 2 ∗ 9
heptagons, and it has 9 ∗ 9 vertices, 16 ∗ 9 edges and 7 ∗ 9 faces,
Figure 6: An approximation of a torus
which means that its Euler characteristic given by the first definition
is indeed zero.
We can also compute the angle defects and excess’ of all the vertices of the torus in Figure 6 and notice
that they add up to zero. This means that the angle defect on the outer surface is as large as the angle excess
in the middle. The result is an example of the Descartes’ theorem on the total defect of a polyhedron, which
states that the sum of the total defect is 2π ∗ χ. Descartes’ theorem is a special case of the Gauss-Bonnet
theorem, where the curvature is concentrated at discrete points, the vertices. The Gauss-Bonnet theorem
is a fundamental result that bridges the gap between differential geometry and topology by connecting the
geometrical concept of curvature with the topological concept of Euler characteristic. It states that for closed
surfaces the total curvature equals to 2π ∗ χ. We can conclude that since the Euler characteristic of a torus
is zero, its total curvature is also zero. In general the Gauss-Bonnet theorem means that no matter how you
bend a surface (without creating holes) its total curvature will stay the same since its Euler characteristic,
being a topological invariant, does not change even though the Gaussian curvature at some points does. For
example, if you push a dimple into a sphere, the total curvature of the surface will stay 4π even though the
Gaussian curvature changes around the dimple. Notice that Curvagons are made of solid flat pieces so the
curvature is indeed concentrated at the vertices. Other way to approximate curved shapes is to create pieces
with holes, like Curvahedra [2], where the curvature is spread over the open region, or specially design pieces
where the curvature is pushed into meandering edges as in Zippergons [1].
We can also consider hyperbolic triangles to see what extra information the Gauss-Bonnet theorem
provides. Calculating the Euler characteristic is easy since all triangles have three vertices, three edges, and
one face, that is, χ = 3 − 3 + 1 = 1. Notice that triangles have a boundary and so they are quite different
from the torus considered above. Because of the boundary, the Gauss-Bonnet theorem becomes a bit more
Figure 7: Turning angles in red and the interior angles in blue. The total turning is the sum of the turning
angles. For a flat triangle, this is 360°. For a hyperbolic triangle, this is strictly more than 360°.
4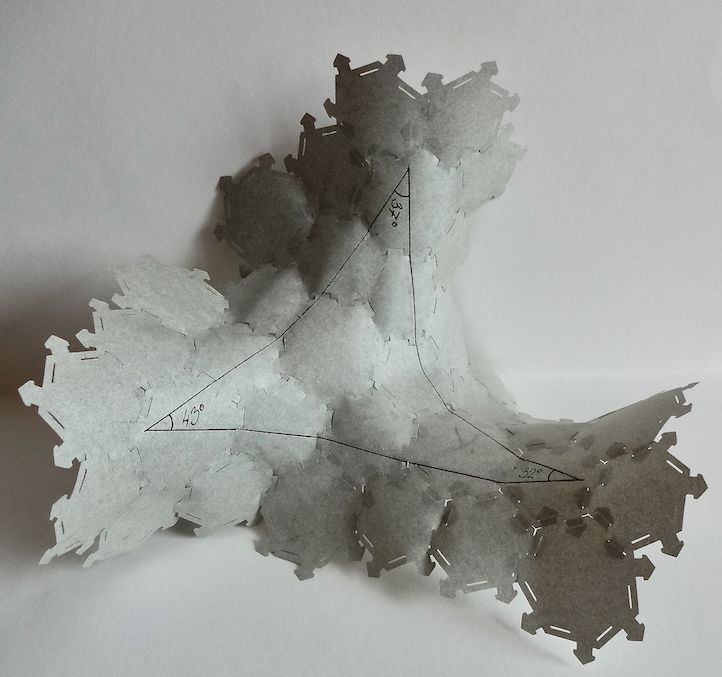
complex stating that total curvature within a triangle = 2π ∗ χ −
total turning = 2π − total turning. Total turning describes how
much a person following the edge of a triangle would have to turn in
order to return to the point they started from, as shown in Figure 7.
It is given by the sum of the turning angles, where turning angle =
π − interior angle. Hence the total turning for a triangle can be written
as 3π − ∠α − ∠β − ∠γ, where ∠α, ∠β, ∠γ are the interior angles of
the triangle, and so we can write total curvature = 2π − (3π − ∠α −
∠β − ∠γ) = ∠α + ∠β + ∠γ − π. We can now use the knowledge
that the Euclidean plane has zero curvature to deduce the fact that the
angles of a triangle add up to π on a flat surface. For hyperbolic triangles
the total curvature within a triangle equals to ∠α + ∠β + ∠γ − π, the
Figure 8: A hyperbolic triangle on deviation of the angle sum from the Euclidean triangle angle sum π.
a Curvagon paper model. Since the curvature of the tiling model is concentrated at the vertices, the
deviation should equal − number of vertices inside the triangle ∗
angle excess. You can test this by drawing several triangles of different sizes on your model and calculating
the angle sums. Figure 8 shows a triangle on a hyperbolic football model. It has has eight vertices inside
it, so the curvature within the triangle is −8 ∗ 84/7° ≈ −68.57°. The interior angles measure 43°, 32° and
37°, and hence the deviation of the angle sum from 180° is −68°. Notice that the largest triangle you could
in theory draw on an infinitely large hyperbolic football model would have 21 vertices inside it and all the
angles would be zero.
2.3 Platonic and Archimedean Solids
Platonic solids are convex regular polyhedra, which means that all their faces are identical regular poly-
gons and that the same number of faces meet at each vertex. You can easily test that there exists
only five platonic solids. Notice that a vertex needs at least 3 faces and an angle defect. If the an-
gle defect is zero the regular tiling will fill the Euclidean plane. If there is angle excess you will get
a saddle shape. Next we relax the above rules and allow the use of different regular polygons to create
convex polyhedra called Archimedean solids, as shown in Figure 9. All the vertices are still expected
Figure 9: The 13 Archimedean solids build from EVA foam Curvagons.
5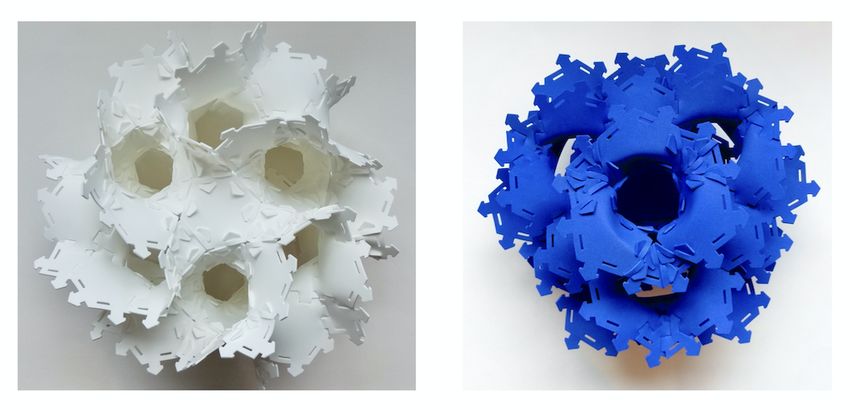
to be identical and the shapes have to be globally symmetric. The
symmetry requirement means that prisms, antiprisms and the elon-
gated square gyrobicupola are not considered to be Archimedean
solids, as shown in Figure 10. There are 13 Archimedean solids
(excluding the five Platonic solids) and they can be constructed from
the Platonic solids by truncation, that is, by cutting away corners.
Notice that all of these convex polyhedra can be considered to
be approximations of the sphere. They have no holes in them so
their genus is zero and so their Euler characteristic χ is two. Using
the Descartes’ theorem we see that the total angle defect of all of
Figure 10: A prism (left), elongated the solids is 2π ∗ χ = 4π or 720°. This can be quite surprising
square gyrobicupola (middle), and an- since the smallest solid (tetrahedron) has only four vertices while
tiprism (right) are only locally symmet- the biggest solid (truncated icosidodecahedron) has 120. The result
ric. is explained by the fact that the more vertices a solid has the smaller
the angle defects become. The angle defects of a tetrahedron are
180° while the angle defects of a truncated icosidodecahedron are only 6°. Since all the vertices of Platonic
and Archimedean solids are identical, the total defect is given by angle def ect ∗ number of vertices which
means that number of vertices = 720°/angle def ect.
3 Polygon Sculpting
Approximating shapes and understanding curvature is important in many applications. For example, polygon,
and especially triangle, meshes are used in 3D computer graphics. Also, to create a well-fitting dress you
need to know how to cut patterns to create positive and negative curvature. Since Curvagons are flexible and
can be woven together quickly they can be used for testing new ideas and for polygon sculpting. As a simple
exercise, students can consider what kind of packaging and capsules can be created using different polygons,
and which of them can be opened in a way that would result in near zero-waste cutting patterns.
We can also consider how to approximate more complex shapes using Curvagons. Regular polygon
tessellations have long been used to create crocheted blankets but these so-called granny squares (or, more
generally, polygons) have also been used to make stuffed animals. We can use Curvagons instead of crocheted
Figure 11: A polygon brontosaurus made from EVA foam Curvagons.
6
polygons to test different animal models. See Figure 11 for a
Curvagon brontosaurus. Building different animals allows stu-
dents to get creative while still forcing them to think about how
different areas curve and how to mimic this using polygons.
Polygonal animals can also be used as an introduction to com-
puter graphics where smooth shapes are estimated by triangle
meshes. How would you need to divide the regular polygons
of your model to create a good piecewise flat approximation?
Weaving has long been used to create clothing and other
utility articles. One example is the Finnish virsu, a type of bast
shoe traditionally woven from strips of birch bark. The weave
creates a square tiling where corners can be made by placing
three squares around a vertex and a saddle shape (for the ankle)
by using five squares. One can use small square Curvagons
to create different versions of virsu, as shown in Figure 13.
These models can also be opened several ways to find cutting
patterns for virsu type slippers. Curvagon slippers could be
made from leather or felt. Since the individual pieces are small,
one can use discarded scrap materials which would otherwise
go to waste. These type of modular techniques, where small Figure 12: A polygon approximation of a
pieces are used to create larger surfaces, have gained popularity torso from EVA foam Curvagons.
in recent years by repurposing waste materials from fashion
houses and tanneries to create sustainable fashion. Interlocking small square Curvagons creates an interesting
texture on the smooth side of the model. This simple weave could be used to create pillowcases, rugs, bags
and many other everyday items from different leftover materials.
We can also take the idea of modular fashion a bit further and use Curvagons to study the different types
of shapes needed for creating clothes in general. A well-fitting shirt has areas of positive, negative and zero
curvature, as shown in Figure 12. A tight pencil skirt takes much less fabric but requires more modelling
than a 50s-style skirt, which can be laid out to create a full circle, and so could be constructed using an
Euclidean tiling. The inspiration between mathematics and fashion can also work to the other direction as
was illustrated by Zippergons [1]. Zippergons are flexible patterned pieces that are designed to fit a given
shape and were inspired by discussions between a mathematician Bill Thurston and Dai Fujiwara, the director
of design for the Issey Miyake fashion house, on how designing fitting clothes and mathematics is related.
Figure 13: A traditionally woven virsu and the same design using Curvagons (left), a more slipper-like design
showing the interesting pattern on the smooth side (middle), and a virsu inspired slipper (right).
7
4 Summary and Conclusions
This paper demonstrates how Curvagon tiles can be used to introduce and explore several mathematical
concepts. Curvagons are flexible regular polygon building blocks that can be made from different materials
and they can be assembled into infinitely many possible shapes. They can be used to introduce mathematical
concepts suitable for different educational levels ranging from elementary school to university. Younger
students can experiment with angles, different ways to tile the plane, and the Platonic and Archimedean
solids. Older students can be introduced to the concept of non-Euclidean geometry and how many geometry
facts they have learned in school are actually true only in Euclidean geometry. They can also test how all the
Platonic and Archimedean solids (or any polyhedron that is homeomorphic to the sphere) have the same total
angle defect. Hyperbolic geometry is also interesting for university-level students and Curvagons can even
be used to introduce fundamental results like Gauss-Bonnet theorem through its special case of Descartes’
theorem on total angle defect. Curvagons can also be used to construct beautiful mathematical objects like
triply periodic minimal surfaces such as Schoen’s Gyroid and the Schwarz’ D surface, as shown in Figure 14.
In conclusion, Curvagons can be used to construct just about any shape you can imagine.
Figure 14: A Curvagon approximation of the Schoen’s Gyroid (left) and the Schwarz’ D surface (right),
which are examples of triply periodic minimal surfaces.
References
[1] K. Delp, and B. Thurston. “Playing With Surfaces: Spheres, Monkey Pants, and Zippergons.” Bridges
Conference Proceedings, Coimbra, Portugal, Jul. 27–31, 2011, pp. 1–8.
https://archive.bridgesmathart.org/2011/bridges2011-1.pdf
[2] E.O. Harriss https://curvahedra.com
[3] D. W. Henderson, and D. Taimina. Experiencing geometry: in Euclidean, spherical, and hyperbolic
Spaces. Pearson College Division, 2001.
[4] K. Henderson. “Build Your Own Hyperbolic Soccer Ball Model.” Cabinet Magazine, vol. 16, winter
2014-2015. https://www.cabinetmagazine.org/issues/16/henderson.php
[5] H. Kekkonen. “Do the Angles of a Triangle Add up to 180? – Introducing Non-Euclidean Geometry.”
Bridges Conference Proceedings, Aug. 2–6, 2021, pp. 285–288.
https://archive.bridgesmathart.org/2021/bridges2021-285.pdf
[6] F. Sottile. https://www.math.tamu.edu/~frank.sottile/research/stories/hyperbolic_football/index.html
[7] D. Taimina. Crocheting Adventures with Hyperbolic Planes. AK Peters/CRC Press, 2009.
8

You can also read

















































