Beams Department - CERN Document Server
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Beams Department
Issue 27 NEWSLETTER June 2019
Inside this issue:
Page 1: Newsletter editorial - L. Jensen
Page 2: Safety article – BE safety unit
Page 4: BGV demonstrator – A. Alexopoulos et al
(BE-BI)
Page 5: Carbon coating, robotics and rapid
prototyping – Ole Gunnar Sveen (BE-OP)
Page 6: New Strategy and Technology for Editorial:
Operational GUIs – Vito Baggiolini (BE-CO)
Dear readers of the BE Newsletter.
Page 8: LHC access system renovation during
LS2 - Timo Hakulinen (BE-ICS) The first two articles in the June edition cover how to
declare accidents in the work-place and provide
Page 10: Reminder for deadlines and BE news-letter results from the BGV demonstrator in the LHC. The
correspondents three remaining articles show rapid prototyping for
carbon-coating of SPS magnets, recommendations
for GUI development and LHC access system
Next issue renovation.
The next issue will be published in August I hope that you find the material interesting and it
2019 and contributions for this should be motivates you to contribute during 2019 with an
received before the end of July 2019. article in either French or English. In order to do so
Suggestions for contributions are always most please contact your respective group contacts.
welcome: simply contact your correspondent
Lars Jensen, BE Newsletter editor-in-chief
(see last page of this newsletter).
1
EDMS: 2093144, Additional Information:
https://admin-eguide.web.cern.ch/procedure/accidents
Safety questions? Contact us: mailto:be.dso@cern.ch
2
EDMS : 2093144 - Information complémentaire:
https://admin-eguide.web.cern.ch/procedure/accidents
Des questions de Sécurité? Contactez-nous: be.dso@cern.ch
3
LHC BGV Demonstrator correlations between the tracks. To achieve this,
consecutive measurements are recorded for a few
Beam gas interactions are the main reason for
seconds of integration time. The longer the
vacuum systems that are integral to every
integration time the higher the achievable
accelerator. Interactions occur when the tightly
precision of the measurement as shown in figure
packed bunch of particles collides with a gas
2.
atom inside the accelerator pipe. These collisions
lead to a secondary particle shower covering the
downstream area along the beam pipe.
The BGV demonstrator was designed to take
advantage of these collisions to evaluate the
possibility of using them for non-invasive
transverse beam size measurements. To this end
a tracking detector was placed around the beam
pipe in the straight section left of Point 4 of the
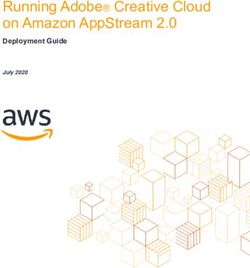
LHC to record the secondary particles and Figure 2: shows the precision achievable with the
reconstruct the particle paths back to their origin. current BGV demonstrator based on 800µm
beam size at injection energy and 200µm at flat
Since the vacuum in the LHC beam pipes (around top for a data rate of 6 kHz.
1.5e-10 mbar) is very good, the rate of beam-gas
interactions is too low to gather the necessary One of the benefits of the BGV is its ability to
amount of data in a relevant timeframe. Thus, to record data at any beam energy. It is therefore
achieve a sufficient data rate, a gas target also capable of measure the beam size evolution
chamber was installed, replacing a section of the during the ramp (see figure 3).
beam pipe of ring 2 of the LHC (see figure 1
below).
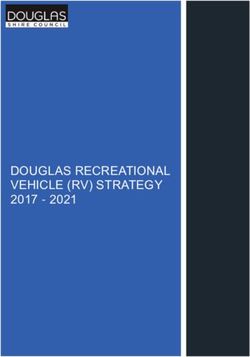
Figure 3: Measurement of LHC Fill7334 showing
the measured beam size in horizontal(x) and
vertical(y) direction and the change during the
Figure 1: Overview of the BGV layout as
energy ramp for an integration time of 20s. The
installed in the LHC tunnel. The two tracking
emittance blow-up at injection energy can be seen
stations are separated by one meter of air.
as a positive slope for H and V.
The gas chamber allows for local injection of
The BGV is also capable of measuring selected
neon leading to an increase in local pressure of up
bunches individually. To perform these
to 1e-7 mbar, increasing the interaction rate to
measurements, bunches must be selected in
around 200 Hz per bunch. This collision rate is
advance to dedicate the whole acquisition
high enough to make measurements while still
bandwidth to a few select bunches as shown in
low enough to have no significant effect on the
figure 4.
beam. To keep the surrounding beam vacuum at
the expected layer additional vacuum pumps are
installed up and downstream of the gas target.
Measurements with the BGV are performed by
reconstructing the tracks created by many
showers caused by beam-gas interactions and
then calculating the beam size from the
4
The chosen method for getting the camera and
accompanying cable to the far end of the 3m long
vacuum chamber, was by mounting it to a 1.6m
long train, roll this in, and then extend it by
another 1.6m. This is not an easy feat to
accomplish in the confined space of the SPS
tunnel, with most elements of the machine still in
place. There had to be an easier solution…
Figure 4: Shows the measurement of 7 individual Based on the CAD drawing of the vacuum
bunches each recorded at 50 Hz data rate with an chamber profile downloaded from EDMS, I drew
integration time of 150s. up the first prototype in a couple of days. For the
functionality, I chose many people’s favourite
The BGV has shown that measurements of beam- microcomputer – the Raspberry Pi (RPi) – as it
gas interactions are a feasible option for has both general-purpose input output (GPIO)
measuring the local transverse beam size with pins and a camera interface right out of the box.
sufficient precision. Currently efforts are ongoing To move inside the magnet, it was equipped with
to develop an upgraded detector concept due to a motor and front-wheel drive. A stepper motor
be installed on both beams in the LHC during was chosen, as this allows us to calculate the
LS3. exact position of the vehicle – 200 motor steps
equals 1 turn of the axle and 63mm of movement.
Andreas Alexopoulos, Hélène Guerin, It’s powered by a 3.7V 6000 mAh Li-Ion battery
Robert Kieffer, Sotirios Vlachos and Benedikt (through a 5V step-up converter), which lasts just
Würkner (BE-BI-BL) short of one hour.
Consensus on the web seems to be that I/O is
Carbon coating, robotics and rapid easiest controlled by Python on the Raspberry,
and fittingly I was just attending an introduction
prototyping
to Python the same week, so a tiny script was
During LS2, all the focusing quadrupoles of the
written to control the motor. However, to make
SPS are having a layer of amorphous carbon
the interface as universally accessible as possible,
applied to the inside of their vacuum chambers.
I wanted it to be web based. For this purpose
The same is true for all adjacent elements with a
‘Flask’ exists – a Python micro-web framework.
length of more than 50 cm. The goal of this
Setting it up took literally 5 minutes, and writing,
coating is to greatly reduce the number of
debugging and optimizing the HTML and Python
electrons being pulled out of the steel tubes by the
code another day or two.
passing proton bunches (the so-called ‘secondary
There are already a myriad of solutions for
yield effect’).
controlling the RPi camera from a web page, so I
The process is known as Plasma Enhanced
decided to use one with the descriptive name
Chemical Vapor Deposition (PECVD), and uses
“RPi Cam Web Interface”, rather than spending
an Argon plasma to make carbon atoms “jump”
time writing something from scratch. It takes
from a cathode and deposit themselves uniformly
photos, time-lapses and videos, and is easy to
on the surface of the vacuum chamber. For my
configure.
assignment during LS2, I decided to focus on
Communication with the device is done via Wi-
quality control closely related to my regular job
Fi, in this case the Raspberry Pi also works as an
on the operations team.
access point, which makes it completely
There are three parts to this quality control: 1)
independent of other infrastructure. It remains to
Process monitoring, 2) sampling and 3) visual
be seen if connection can be maintained when the
inspection. During the 22-hour length of the
vehicle moves further into the magnet, however,
coating process, residual gases inside the vacuum
it is designed to be completely autonomous – just
chamber are continuously analysed, and the
input travel distance and speed, and wait for it to
pressure monitored. After the coating is finished,
return. The 8MP photos or 1080p video can then
a small sample is sent off for analysis, and a
be downloaded from the same web interface,
visual inspection of the vacuum chamber is
analysed and archived. I am still working on an
performed using an endoscopy camera.
5
overlay indicating at what distance from start JavaFX. Unfortunately, after almost two decades
each photo is taken, which will make it even of loyal service, Java GUI technology is
easier locating any irregularities found during declining (while Java on the server side continues
analysis. to thrive!). A year ago, Oracle, the company
A prototype of the housing was 3D printed in backing Java, stated in their Java Client Roadmap
ABS plastic (see figure 1), and all the parts Update that “JavaFX has become a ‘niche’
mounted.
technology with a market place [that] has been
eroded”. They also announced that they will not
ship JavaFX as part of the Java platform
anymore, but instead let it live on as an open-
source project maintained by the community.
We assessed this new situation for a few months
by analysing Twitter feeds, discussions groups
Figure 1: 3D printed prototype and the activity on the github repository. We also
talked to experts and participated in a workshop
The effective time spent from conception of the
idea until the first functional prototype was “JavaFX beyond 2022” in Munich, to meet with
humming away inside a piece of vacuum other companies invested in JavaFX and with an
chamber on my desk (figure 2), was less than a official Oracle representative. We finally
week. concluded that we cannot count on JavaFX as our
future GUI technology.
On the other hand, although it is near to
impossible to recruit new people who have Java
Swing experience or who are willing to acquire
it, the future of Java Swing seems quite stable.
Oracle cannot unilaterally abandon Java Swing,
because it is a part of the standard Java SE
platform, governed by the Java Community
Process (JCP). The JCP board and community
would have to vote for removing Java Swing.
This is very unlikely because many organizations
are heavily invested in Java Swing (much more
than in JavaFX).
Over the last few years, Python has exploded in
popularity. Worldwide, it is amongst the most
Figure 2: prototype by a vacuum chamber popular programming languages and the number
one “want-to-learn” language. In the Accelerator
At the time of writing, we are just waiting for the Sector, it is increasingly popular amongst
production version to come out of the mechanical physicists (for data analysis and MDs),
workshop. equipment specialists (for GUIs, and
Ole Gunnar Sveen BE-OP-SPS prototyping/testing) and in controls (code
generation, DevOps tools and system
New Strategy and Technology for administration). Python GUIs are typically
Operational GUI Applications written using PyQt, a Python binding to Qt. Qt is
a popular GUI framework implemented in C++
There are presently over 500 operational Java
and used in desktop applications such as Linux
Graphical User Interfaces (GUIs) used in the
KDE and WinCC OA, and also in medical and
CCC and other control rooms, of which around
media appliances, car dashboards, ‘internet of
90% were written in Java Swing, and 10% in
things’ (IoT) devices and other embedded
6
systems. Both Python and PyQt have existed for applications. We are organizing training together
almost 30 years; Python is on the rise, and PyQt with HR, and a first PyQt training course is
shows no signs of decline. planned for September.
Web technology is the foundation of the Internet Based on the above, we will provide a Rapid
and very popular amongst the latest generations Application Development (RAD) toolkit, which
of software engineers. Several software teams in will enable users to develop dashboards and
the Sector use it to develop their applications, simple applications, requiring little-to-no Python
including in BE-CO for all Data Services coding. In terms of technology, we will leverage
applications. an open-source Python RAD project from the
HEP community; most likely PyDM developed at
However, like many things nowadays, Web
SLAC.
technology evolves rapidly and new frameworks
come and go every few years. Over the last We want to enable developers to evolve a RAD
several years, three major frameworks (Angular, application into a fully-fledged GUI application
React, and Vue.js) have gained significant without having to rewrite it from scratch. This is
popularity, though none of them really stands out useful because GUIs often start small and simple
above another. As a consequence, a team that but become big and complex over time, as new
invests into Web must be willing to adapt to features are added. In current RAD frameworks
changing technology, both in terms of learning (such as Inspector and BE-CO Fixed Displays),
new frameworks and rewriting existing this evolution is not possible. Finally, we plan to
applications. This is fine for our software provide a tool that helps Inspector users with the
engineers who enjoy keeping up-to-date with migration of existing panels to the new RAD
technology, but clearly not an option for toolkit, as long as they use only external Python
specialists in other domains who just want to scripts without visual coding.
learn as much about software as needed in order
As for Java, we will maintain our existing
to get their main job done.
frameworks and components, without adding any
Our new strategy for operational GUIs is based new functionality. Our support for JavaFX will
on the above considerations and has been end in LS3. We will do our best to keep Java
presented in October 2018 in the CO3. We Swing operational at least until LS4. Swing also
recommend the use of Python and PyQt for the remains the recommended framework with which
development of operational GUIs. We are to develop new operational GUIs, until the new
developing a similar framework for Python to the PyQt-based GUI and RAD frameworks are ready.
one already provided for Java Swing. According For people determined to develop Web
to our current plans, it will consist of (1) an applications, BE-CO has established a common
application frame with a menu bar and a logging approach based on the open-source Angular
console; (2) accelerator-specific widgets similar frame-work that is already widely used in several
to the ASC beans; (3) 2D charting and function applications (CCDE, Layout, AFT, ASM) and
editor components similar to the JDataViewer will soon be used for new ones (e.g. TIMBER).
library; (4) APIs to access the controls system. We can provide consulting for new Web
Active Python users outside CO have already application developments and share our starter
developed such APIs (e.g. pyJAPC, pyLSA, or project, common CERN components and
pyTimber). We are progressively taking on codebase. Do not hesitate to contact us to discuss
responsibility for these APIs and will develop further.
new ones (e.g. pyCCDA) in collaboration with
Vito Baggiolini, BE-CO-APS
the CERN Python community. A first version of
our Python GUI framework (not covering all of
the above) will be available at the end of 2019.
We will complement our offer with coding
templates to jumpstart users writing typical
7
LHC access system renovation during LS2 Material Access Devices (MAD), and sector
doors is implemented from scratch.
People accessing the LHC sites have no doubt
noticed that a project is underway for a
comprehensive overhaul of the LHC Access
Control System (LACS). At the same time,
modifications to the LHC Access Safety System
(LASS) are being carried out. While the LACS
manages the access control of the LHC complex
including the experiments, LASS is responsible
for the personnel safety by ensuring that no
persons are present in the restricted areas during
beam and certain other well-defined hazardous
conditions, such as cool-down or powering tests.
The current LACS was implemented for the
original LHC project and commissioned in 2008.
The access control application, ‘Evolynx’ by
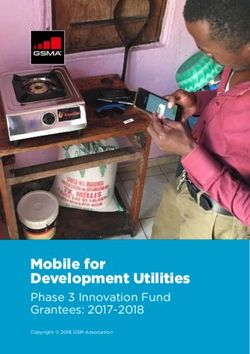
Cegelec, is at end of life and a comprehensive Fig 2: The MAD, access rack and PAD at PM15
upgrade of both software and hardware is
required. This upgrade comprises a full redesign The guiding principle in the design of the new
of the control architecture of the various LACS has been to manage the various
subsystems. A commercial access control subsystems with as light an integration as
application NEDAP will be managing access possible with clearly defined system interfaces
authorizations per user and access zone. NEDAP where applicable. In contrast to the deeply
is already being used at CERN in the PS access integrated monolithic philosophy of the old
control system and the CERN site access control ‘Evolynx’, the new system will allow much
system, and it will also be used in the new SPS easier subsystem management and upgrades in
access control system. The new operator interface the future.
will provide the main access operator functions, The installation works are underway since the
focused on performance and ease of use, while start of LS2, and several surface access points
offering a detailed view of the entire system when have already been renovated. While the project
necessary (Fig 1) advances, compensatory measures for ensuring
access through the affected access points are put
in place during the 2 to 3 weeks that the
renovation of each access point requires. These
compensatory measures include rerouting access
via alternative access points, or when not
possible, setting up CERN guardians to check
users accessing the restricted areas with portable
badge readers. The project also takes advantage
of the simultaneous LHC lift renovation project
to coincide the works as much as possible with
Fig 1: The LHC access operator console the planned lift outages.
Apart from the slightly different interface of the
New access point racks are being installed at all LHC access point displays, there are very few
40 LHC access points (including the test platform visible changes to regular users. Mainly, most
and the future HL-LHC) (Fig 2). The entire users should experience considerably enhanced
supervision and control layer of the access points performance of the access point operation
including Personnel Access Devices (PAD),
8meaning faster passages in and out of the
controlled zones.
While the LACS renovation is the more visible
part to regular users, modifications to the LASS
are equally important. An ambitious package of
consolidation and modification items is being
implemented. Known weaknesses of the current
system are being addressed to minimize the
probability of system issues interfering with
beam operations. Also, consolidation of ageing
equipment is being carried out to avoid any
reliability problems past LS2.
Sectorization optimizations are being
implemented at several LHC sites to facilitate
access for maintenance and repairs to areas
previously inaccessible during powering tests or
beam. Access to galleries (hosting the new
‘MilliQan’ experiment) above CMS will be
possible during beam operation. The surveyor’s
galleries at site 5 will be accessible during
powering tests, and it will be possible to carry out
maintenance of three additional access points at
PM18, UL55, and UX85 during beam.
New sectors are being added to LHC tunnel zones
at sites 1 and 5, where they will serve as
emergency evacuation paths for the new HL-
LHC galleries.
Extensive testing of the LASS will be carried out
starting before the end of 2019 to ensure the
perfect functionality of all new and modified
parts of the system and to avoid regression of
existing functionalities. These tests will require
the access team to take exclusive control of each
LHC site one by one for short periods of time to
verify local parts of the system and the entire
LHC for global tests before the closing of the
machine again in the autumn of 2020. As access
will be blocked to the sites in question during the
tests, careful planning is necessary in
collaboration with the LHC coordination.
After the renovation, the LHC access system will
be well on its way for many years to come. All
LHC stakeholders including users, operators, and
maintenance personnel should be able to benefit
from a well-functioning and streamlined access
system.
Timo Hakulinen, BE-ICS
9Reminder of deadlines:
TECHNICIAN TRAINING EXPERIENCE (TTE)
Committee (15.10.2019)
Applications by 30.09.2019
BE Newsletter Contacts
ABP Correspondent ASR Correspondent
Nicolo Biancacci Marc Tavlet
BI Correspondent
CO Correspondent
James Storey
Eve Fortescue-Beck
ICS Correspondent
OP Correspondent
Timo Hakulinen
Sandy Easton
RF Correspondent HDO Correspondent
Wolfgang Höfle Cassandra Marie Heighton
Editor-In-Chief
Lars Jensen
10You can also read