Analysis and Optimization of the MTU in Real-Time Communications over Switched Ethernet
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Analysis and Optimization of the MTU in Real-Time Communications over
Switched Ethernet
Moris Behnam, Ricardo Marau Paulo Pedreiras
IT / DEEC IT / DETI
University of Porto, Portugal University of Aveiro, Portugal
{morisb,marau}@fe.up.pt pbrp@ua.pt
Abstract and the maximum packet size could be as low as 8 bytes per
packet, e.g. as in the CAN bus.
The Flexible Time-Triggered communication over However, the quantity, complexity and functionality of
Switched Ethernet protocol (FTT-SE) was proposed to NES systems has been increasing consistently. Due to this
overcome the limitation of guaranteeing the real-time evolution, in certain application domains the amount of in-
communication requirements of conventional switches, and formation exchanged over the network reached the limits
at the same time to support reconfiguration of dynamic achievable using traditional fieldbuses. Consequently, new
adaptive systems. The protocol fragments large messages protocols have been investigated, many of them based on
into a sequence of packets that are individually scheduled. high bandwidth general-purpose networks. In particular,
The maximum transmission unit (MTU), that restricts the Ethernet has been complemented with suitable transmis-
packets size, has a significant effect on the schedulability sion control mechanisms to provide real-time services, be-
of the packets. In this paper, we investigate the problem of ing the base for several real-time communication protocols
selecting the optimal MTU size that maximizes the schedu- currently used in NES, such as PROFINET, Ethernet POW-
lability of real-time messages. We propose two algorithms ERLINK, TTEthernet and FTT-SE.
to find optimal/sub-optimal values of MTU; the first one Unlike classical fieldbuses, originally optimized for
finds an optimal solution but exhibits high computational short data transmissions, Ethernet provides a relatively
complexity, while the second one is sub-optimal but exhibits longer packet size, holding up to 1500 data bytes. The max-
a lower computational complexity. Finally, we evaluate our imum data size a packet can hold is commonly known as
proposed algorithms by means of simulation studies and Maximal Transmission Unit (MTU) and may have a rather
compare their results with the results of assigning MTU to noticeable impact in the performance of real-time commu-
the maximum packet size that the protocol can allow. nication protocols. For instance, in time-slot based proto-
cols such as TTEthernet [11], the MTU constrains the min-
imum slot duration. Whilst in cyclic-based real-time proto-
cols, such as Ethernet POWERLINK [1] or FTT-SE [10], it
1 Introduction
constrains the amount of idle time that may be included on
every cycle to prevent overruns between cycles.
Nowadays Networked Embedded Systems (NES) are The dissemination of NES in areas such as machine
pervasive, being present in almost all aspects of our daily vision, automated inspection or object tracking based on
life. In early days, NES were typically based on highly video streams, brought to the foreground the MTU opti-
constrained hardware resources and performed simple func- mization problem. This class of applications produces large
tions, typically digital IO and analog data interface. Addi- amounts of data. For instance, an MJPG compressed image
tionally, specific network protocols, commonly designated may easily reach tens or even hundreds of KiB per frame
by fieldbus, have been developed to address the specifici- and it requires multiple packets to be transmitted. For this
ties of NES. Fielbuses normally have a very limited band- type of data, it would be desirable to use an MTU as large
width, being optimized to support frequent exchanges of as possible, in order to minimize the overhead associated to
small data. The data frequency could reach the KHz range the transmission of each Ethernet packet (38 bytes). How-
1 This work was partially supported by the iLAND project, call 2008-1 ever, as discussed above, the use of a large MTU penalizes
of the EU ARTEMIS JU Programme an by the HaRTES project, funded by the efficiency of some real-time protocols, raising an opti-
COMPETE/FCT under the name FCOMP-01-0124-FEDER-007220. mization problem.This paper investigates the problem of determining the 3 FTT-SE protocol
packet size that optimizes the protocol data-throughput effi-
ciency. This work is developed in the scope of the FTT-SE FTT-SE [10] is an academic real-time communication
protocol, but the results obtained should be easily general- protocol that exploits the Master/Multi-slave paradigm and
izable to other cyclic-based real-time protocols. the advantages brought by Ethernet micro-segmentation,
Two different algorithms are proposed. One is optimum, namely the ability to forward packets in parallel and the ab-
but exhibits high temporal complexity, thus may not be suit- sence of collisions on a one node per switch-port basis. This
able for online usage. The other is sub-optimal but exhibits protocol uses a master node to coordinate the transmissions
a lower computational complexity, thus being more suitable of other nodes. The communication is organized in fixed
to online usage. duration slots called Elementary Cycles (ECs), which are
The remaining of the paper is organized in the following triggered by a periodic message (Trigger Message - TM),
way. Section 2 outlines related work. Section 3 presents issued by the Master, containing the schedule for each EC.
a brief overview of the FTT-SE protocol. Section 4 intro-
duces the system model. Section 5 presents the schedula-
bility analysis. Section 6 the problem formulation. Section
7 describes the MTU optimization algorithms proposed in
this paper. Finally, Section 8 presents experimental results
and Section 9 concludes the paper.
2 Related work
The problem of fragmenting messages into smaller pack-
ets transmitted over large networks has been discussed
in [5]. In such networks, some routes can carry limited
packet size and large messages should be fragmented lead-
ing to a higher protocol overhead and a lower throughput.
For such problem, optimal routing techniques are devel-
oped to avoid message fragmentation as much as possible.
A similar problem can happen when transmitting messages
through high bit-error rate links such as wireless. Retrans-
mitting too large packet size degrades the efficiency of pro-
tocols and the same happens when transmitting small packet Figure 1: The FTT-EC structure.
size because of the high overhead. Adaptive and optimal so-
lutions have been proposed in [4] and [6]. However, the so- The traffic scheduling activity is carried out on-line in the
lutions proposed to solve the fragmentation problems men- Master, invoked once per EC and disseminated by means of
tioned above are not applicable to our case as the source of the TM. The EC duration is tunable and can be designed to
the problem and the goals are different from ours. suit the application needs. Typical EC durations range from
The most related work from real-time scheduling ap- 1ms to tens of ms, depending on the application dynamics.
proaches is the limited preemption approach presented Traffic scheduling is centralized, allowing an easy enforce-
in [3], where an optimal algorithm is presented to select op- ment of any scheduling policy as well as performing atomic
timal preemption points in each task in order to increase changes to the communication requirements. This last fea-
the schedulability of tasks, taking into account the over- ture facilitates the deployment of mechanisms that allow ad-
head of task preemption and the generated blocking from mitting and removing message streams, on-line, under guar-
lower priority tasks on the higher priority tasks. The prob- anteed timeliness, and mechanisms for dynamic bandwidth
lem of selecting the optimal preemption points to increase management.
the schedulability of the tasks is similar to the problem of The protocol supports real-time synchronous and asyn-
selecting the optimal MTU size. However, the proposed al- chronous messages, as well as non real-time traffic. The
gorithm in [3] is not suitable for our case, as the effect of synchronous traffic is time-driven, being activated au-
non-preemptive regions (between two preemption points) tonomously by the scheduler. The aperiodic traffic is event-
from lower priority tasks block higher priority tasks. In our driven, driven from the distributed application at arbitrary
case any message can contribute to the idle time included time instants. Messages are locally queued, awaiting trans-
on every scheduling cycle affecting the schedulability of all mission while a periodic message updates the activation re-
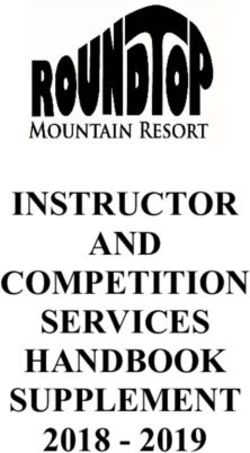
messages. quests on the Master’s scheduler.As depicted in Figure 1, the EC is organized in three in- the maximum amount of idle time that can be inserted in
dependent time windows, Synchronous, Asynchronous and an elementary cycle or window is upper bounded by the
the slot for the TM. The synchronous and asynchronous transmission time of the largest packet. It is also observed
traffic is scheduled on the respective time windows, whereas that the relative penalization due to the idle time is related
the non real-time traffic takes any transmission slot remain- to the ratio between the elementary cycle (or window dura-
ing from both windows in a best-effort policy. The win- tion) and the transmission time of the largest packet. This
dows have a user-defined maximum duration, which is en- last observation is particularly relevant, since it constrains
forced at run-time by the scheduler. Consequently, no win- the design space. The cycle duration is typically imposed at
dow overruns should occur, providing strict traffic isolation the application design, based on the system dynamics, thus
among traffic classes. reducing the optimization space to the M T U parameter.
Further details about the FTT-SE protocol can be found
in [10] and [8].
5 Schedulability analysis
4 System model and assumptions
The FTT-SE protocol does not allow window overruns,
using the inserted idle-time based scheme described in Sec-
This paper considers a simplified model that describes
tion 4. In the schedulability analysis, to model the possible
cyclic-based real-time protocols such as the FTT-SE proto-
scheduling suspension in each scheduling window, an idle
col. The system comprises a set (SM ) of N synchronous
time equal to the maximum packet size of all messages that
message streams, each stream (mi ) modeled using the peri-
use the link has to be considered, which decreases the effec-
odic real-time model (Equation (1)).
tive size of the window. [9] presented a schedulability anal-
ysis based on utilization bound for FTT-SE synchronous
SM ≡ mi (Ci , Di , Ti , Si , Ri , M maxi ) (1)
message scheduling. Considering only the scheduling of
For each mi , Ci represents the total transmission time a downlink of a switch, the schedulability condition of the
that includes message fragmentation and overheads. We de- link is given by Equation (2).
fine M maxi as the maximum transmission time among the
packets that compose mi . M maxi is defined per message X Ci LSW − Imax
≤ U lub × (2)
and it cannot be greater than the size of a packet holding Ti E
∀i
M T U data bytes. Di and Ti are the relative deadline and
message period, represented in multiples of ECs. In this where U lub is the utilization bound assuming either RM or
paper, we assume implicit deadlines, i.e, Ti = Di and that EDF, E is the elementary cycle duration and Imax is the
streams can be scheduled using Earlier Deadline First EDF maximum idle-time, computed as follows:
or Rate Monotonic RM. Finally, Si is the source port (i.e.
the switch port where the data source is attached to the net- Imax = max(M maxi ) (3)
work) and Ri denotes the receiving port of a unicast trans- ∀i
mission. Let us define O as the overhead of the protocol added to
The above model is also applicable to sporadic mes- each packet. Let us also define nPi as the number of pack-
sages, with the only difference being that Ti represents the ets required to transmit message mi . From the definition
minimum inter-arrival time, i.e., the minimum time between of total message transmission time, Ci already includes the
consecutive instances of message mi . These models repre- data transmission time Ci∗ and the protocol overhead, i.e.,
sent accurately the real-time synchronous and asynchronous equal to nPi × O. Given Ci∗ , M maxi is evaluated depend-
messaging system of the FTT-SE protocol. ing on the number of packets nPi and the overhead O as
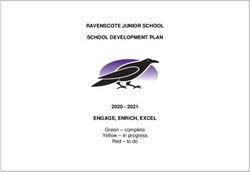
The system model considered in this paper also as- follows,
sumes the nonexistence of cycle overruns, which is usual
for cyclic-based protocols. Overruns are prevented defer- Ci∗
ring the dispatch of messages that may exceed the cycle (or M maxi = +O (4)
nPi
time window) capacity. Figure (2) illustrates this scenario,
in which message m48 does not fit inside the k th elemen- Note that, from the definition of M T U , the transmission
tary cycle and remains in the ready queue. The message time of all packets should be lower than the M T U , i.e.,
is eventually transmitted in the following cycle along with M maxi ≤ M T U . Considering the protocol overhead O,
C∗
other higher priority messages that activate in the meantime. nPi should satisfy the condition nPi ≥ d M T Ui −O e. How-
The idle-time that results from deferring the message ever, since the overall protocol overhead is directly propor-
transmission cannot be neglected from the system analy- tional to the number of packets necessary to transmit a mes-
sis. This aspect is referred in [2], where it is shown that sage, the condition is minimized (Equation 5).Figure 2: Inserted idle-time illustration
Cj∗
nPj = (5) X Cj∗ U lub × LSW U lub × Imax X nPj × O
MTU − O ≤ − +
Tj E E Tj
∀j ∀j
Taking into account the protocol overhead O in the anal- (7)
ysis, Equation (2) can be rewritten as follows: Then the optimization goal is to minimize function
f (nP ) in Equation (8), which is as a function of the mes-
sage packet number nP . Notice that Imax is a function of
X Cj∗ + nPj × O nP , see Equations (3) and (4).
LSW − Imax
≤ U lub × (6)
Tj E U lub × Imax X nPj × O
∀j
f (nP ) = + (8)
E Tj
∀j
6 Problem formulation
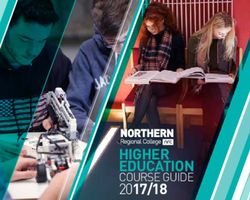
6.1 Example
Equation (6) indicates that the schedulability of the mes- For illustration purposes, consider an example with
sages can be increased either by decreasing the effective O = 0.5 time units, E = 20 time units, LSW = 18 time
load (left hand side of Equation (6)) and/or by increasing the units, scheduled with the Rate Monotonic scheduling pol-
schedulability bound (right hand side of Equation (6)). Fur- icy. Consider also the message set shown in the table below
thermore, all parameters of Equation (6), except the num-
ber of packets and the inserted idle time, are fixed, thus the C 2 4 10 20 30
schedulability of the message set depends on both these pa- T 20 60 120 200 240
rameters. However, Equations (3), (4) and (5) indicate that
the number of packets and inserted idle-time both depend on Figure 3 presents the effective load and the effective
M T U . Selecting a smaller M T U will increase the number schedulability bound as a function of the M T U . As ex-
of packets of the messages, and consequently the effective pected, as the M T U increases both the effective load and
load, while decreasing the idle time. Conversely, select- the schedulability level are reduced. However, the reduction
ing a larger M T U decreases the effective load at expenses is not strictly monotonic and happens at different rates. In
of an higher idle time. Considering these two contradict- the present case, the system is only schedulable for M T U s
ing effects in the schedulability analysis, we may conclude in the range [3...3.8].
that there is a trade-off between decreasing the effect of idle
time and the protocol overhead when changing the proto- 7 Optimization algorithms
col’s M T U .
We can formulate our problem as follows: Given a set of Depending on the protocol specification, requirements
stream messages SM transmitted though the same down- and constraints, the minimum and maximum packet trans-
link and scheduled using EDF or RM scheduling algorithm, mission times are restricted to certain limits M T Umin and
find the optimal M T U such that the schedulability bound in M T Umax . Note that M T Umax ≤ LSW to be able to send
Equation (6) is maximized. To do so, we will rewrite Equa- at least one packet every EC. This range of M T U will be
tion (6) as a function of the number of packets, as shown in used by the algorithms that will be explained in the follow-
Equation (7) ing section.mum f (np) is the optimal solution (Lines 13-16).
0.65
Eff. load This algorithm iterates N ×(nPimax −nPimin ) times and
0.6 Sched. bound since nPimax is proportional to Ci∗ (see Equation (5)), the
0.55
number of iterations depends on the transmission times of
the messages. Note that, if the transmission times of mes-
0.5
sages are not high, then some values of M T U within the
0.45 range [M T Umin , M T Umax ] will not be considered (dis-
%
carded from the search space). The discarded values of
0.4
M T U are ∀M T U 6= M maxi |∀mi ∈ SM &∀nPi ∈
0.35 [nPimin , nPimax ]. All discarded MTUs will not give better
0.3
results than the considered ones in the algorithm. The rea-
son is that Imax is evaluated based on M maxi which is in
0.25 its turn evaluated based on the given nPi independently of
0.2 M T U , hence M T U does not affect Equation (8). The only
2 4 6 8 10 12 14 16 18
MTU condition to satisfy concerning M T U is Imax ≤ M T U
and we assign M T U = Imax to enforce packet transmis-
Figure 3: Effective load and schedulability bound as a function fo sion time of all messages to be less than Imax .
the M T U
Algorithm 7.1: S EARCHING ALGORITHM()
7.1 Searching algorithm
1f = high value
2 for (mi = m1 tomN )
To find an optimal M T U that increases the schedulabil- 3 fi = high value
ity of messages, we can consider a very simple algorithm 4 for(nPi = nPimin to nPimax )
based on iterating M T U from M T Umin to M T Umax . In 5 M T Utemp = Imax = dCi∗ /(nPi )e + O
each iteration, it finds the number of packets for all mes- 6 nP = Find nP All(Imax , O)
sages using Equation (5) and then it evaluates f (nP ) us- 7 ftemp = f nP (Imax , nP )
ing Equation (8). Finally, the M T U value that minimizes 8 if ftemp < fi
f (nP ) will be the optimal solution. However, the computa- 9 M T Ulocal = M T Utemp
tional complexity of this algorithm can be high. It requires 10 fi = ftemp
M T Umax −M T Umin iterations, which may not be suitable 11 end if
for online usage. 12 end for
To decrease the search space, another algorithm based 13 if fi < f
on the number of packets can be used. Given M T Umin and 14 M T U = M T Ulocal
M T Umax , the minimum nPimin and maximum nPimax 15 f = fi
number of packets for each message can be specified using 16 end if
Equation (5). Then, for each possible number of packets 17 end for
within this range, M T U is evaluated as explained in Algo- 18 return MTU
rithm 7.1.
Algorithm 7.1 shows an algorithm that finds the optimal
M T U based on the number of packets. The algorithm iter-
ates for each message mi (Line 2) and then it goes through 7.2 Simplified algorithm
all possible number of packets nPi , from nPimin to nPimax
(Line 4) and for each iteration it enforces Imax = M maxi In the previous section, we have presented two differ-
(Line 5). This can be done by assigning the number of pack- ent algorithms that find optimal M T U with relatively high
ets for all other messages mj |i 6= j to values that make their computational complexity which may not be suitable for
packet size less or equal to M maxi (Find nP All function adaptive systems where the algorithms are applied online.
in Line 6). Find nP All function uses Equation (5) to eval- In this section we propose a lower computational complex-
uate the number of packets for all messages (considering ity algorithm based on an analytical solution that finds a
M T U = Imax ). The algorithm starts by calculating f (np) sub-optimal value of M T U .
(Line 7) and then the local optimal M T U that minimizes Equation (8) can be reformulated to be a function of
f (np) based on mi (Lines 8-11). Finally, considering all nPi (the number of packets of one message mi ). Assum-
local optimal values of M T U , the one that makes the mini- ing that M maxi is the maximum among all messages, i.e.,C∗
Imax = M maxi , then Imax = d nPii e + O (see Equa- 8 Evaluation studies
C∗
tion (4)). Also, since M T U = Imax then nPj = d Imaxj−O e
(see Equation (5)). Substituting these two equations in In this section, we evaluate the improvements that can
Equation (8), be achieved by the algorithms presented in Algorithm 7.1
and Algorithm 7.2 in terms of increasing the schedulability
of messages, compared to the case when the maximum pro-
Ci∗
U lub × +O tocol’s M T U is used (M T Umax ). The evaluation is per-
nPi
f (nPi ) =
E
formed through different simulation studies as will be ex-
plained in the following section.
P dCj∗ /(dCi∗ /(nPi )e)e×O
+ ∀j Tj (9) 8.1 Simulation settings
Equation (9) can be linearized by removing all ceilings In each simulation study, the two algorithms are applied
from the equation, on synthetic message sets generated randomly to find the
optimal (suboptimal) values of M T U . Message sets are
Ci∗
generated based on the following input parameters:
U lub × nPi +O X nPi × Cj∗ × O
f (nPi ) = + • Uset defines a message set utilization and it is equal to
E Tj × Ci∗ P C∗
∀j
Uset = ∀j Tjj .
(10)
By assigning the first derivative of f (nPi ) equal to zero, • [Timin , Timax ] defines a range of message period.
we can find nPi that minimizes f (nPi ).
v • N defines the number of messages.
Ci∗ × U lub
u
nPi = t
u
P C ∗ ×O (11) Given each set of input parameters mentioned above,
E × ∀j C ∗j ×Tj 100000 message sets are randomly generated. In each set,
i
the message set utilization Uset is divided randomly among
Equation (11) can be used in Algorithm 7.1 instead of the the N messages. Message periods are selected randomly
inner loop to find the number of packets for each message within the range of [Timin , Timax ]. The message transmis-
as shown in Algorithm 7.2. In Algorithm 7.2, the function sion time for each message is derived from the desired mes-
fn P i() in Line 3 uses Equation (11) to evaluate the number sage utilization. All randomized parameters are generated
of packets for mi . following uniform distributions.
The complexity of the algorithm is reduced to O(N ) The following assumptions are made in all simulation
which makes it suitable for dynamic systems. However, studies: the channel transmission rate is 100Mbps, the ele-
since we have linearized Equation (10), the result of Equa- mentary cycle duration is E = 1ms, the protocol overhead
tion (11) may not always be optimal but still are near to is 44 bytes (including Ethernet overhead 38 bytes and FTT-
optimal as will be shown in the next section. SE overhead) which makes O = 3µs, and the minimum
and maximum possible packet size [100, 1500] bytes, i.e,
Algorithm 7.2: S IMPLIFIED ALGORITHM() [M T Umin , M T Umax ] = [8, 120]µs.
8.2 Results
1f = high value
2 for (mi = m1 tomN )
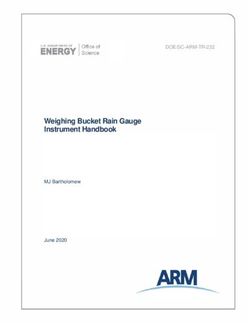
We have performed 5 different simulation studies;
3 nPi = fn P i()
4 Imax = M T Utemp = dCi∗ /(nPi )e + O • Study 1 is specified having N = 10, [Timin , Timax ] =
5 nP = Find nP All(Imax , O) [2×E, 50×E], LSW = 0.5× E, EDF scheduling and
6 fi = f nP i(Imax , nP ) Uset = [0.33, 0.42] with 0.05 increment.
7 if fi < f
8 M T U = M T Utemp • Study 2 changing LSW (compared to Study 1) to
9 f = fi 0.25 × E.
10 end if • Study 3 increasing the number of messages for each
11 end for set (compared to Study 1) to 20 messages.
12 return nP
• Study 4 changing the range of message period Ti
(compared to Study 1) to 50, 100.• Study 5 changing the scheduling algorithm to RM 120%
(compared to Study 1).
100%
Table 1 shows the results of applying the two algorithms 80%
(optimal and simplified) on all simulation studies using the 60% MaxMTU
maximum Usub that keeps the schedulability of all (100000) Optimal
40%
message sets. In this table, Ubave , Ubmin and Ubmax are the Simplified
average, minimum and maximum utilization bounds calcu- 20%
lated based on the right hand side of Equation (7). M T U in 0%
the table shows the range of maximum transmission times
that are evaluated for the message sets. Uset
Study/Alg. Ubave Ubmin Ubave MTU (µs) Figure 4: The results of Study 1.
Study1/Opt. 41, 92% 41, 60% 41, 98% [32.6, 49.8]
Study1/Simp. 41, 90% 41, 59% 41, 98% [32.9, 49.8]
120%
Study2/Opt. 19, 36% 18, 95% 19, 43% [24.4, 37.7]
Study2/Simp. 19, 35% 18, 93% 19, 43% [24.5, 37.7] 100%
Study3/Opt. 41, 73% 41, 02% 41, 95% [35.2, 51.5] 80%
Study3/Simp. 41, 72% 40, 98% 41, 94% [33.9, 51.5]
Study4/Opt. 41, 98% 40, 97% 41, 99% [39.5, 44.1] 60% MaxMTU
Study4/Simp. 41, 98% 40, 97% 41, 99% [41.7, 44.1] Optimal
40%
Study5/Opt. 28, 97% 28, 56% 28, 98% [33.6, 53.5] Simplified
20%
Study5/Simp. 28, 90% 28, 52% 28, 98% [34.0, 53.5]
0%
Table 1: Measured results of all studies.
Uset
Figure 4 shows the schedulability bounds of Study 1, Figure 5: The results of Study 2.
when M T U is evaluated using Algorithm 7.1 (labeled Op-
timal), Algorithm 7.2 (labeled Simplified) and M T U =
M T Umax (labeled maxMTU). As shown in Figure 4 and the protocol overhead effect on Equation (7). However, the
Table 1, the results of the two algorithms are very close and additional number of packets is bounded by the number of
the difference between them is very small. The reason is tasks.
that the error from linearizing Equation (9) can be up to To measure the effect of message periods, we increased
N × O and the product of this is divided by the messages the range of the periods in Study 4. As shown in Table 1,
period, which attenuates the impact of linearizing. this can increase the utilization bound but in very small
Comparing the results of the algorithms and the use of amount compared to the results of Study 1. The reason
M T Umax , we can see that the algorithms can increase the is that since Uset is fixed, increasing the periods of gener-
utilization bound by approximately 5.5, i.e., the utilization ated messages will increase their transmission times, which
bound is improved by 15%. Note that the results of the in its turn increases the number of packets and will have
figure are obtained assuming LSW = 0.5 × E and because negative effect on the schedulability bound. On the other
of the effect of Imax , the schedulability bound of EDF is hand, increasing the message periods will decrease the ef-
reduced to the range shown in the figure. fect of protocol overhead on Equation (7) which will have a
Figure 5 shows the schedulability bound of Study 2 (de- positive effect on the schedulability.
creasing LSW). It is clear that the improvement achieved Finally, in Study 5, RM is used instead of EDF and the
by using the algorithm is higher when LSW is decreased results are shown in Figure 6. The utilization bound is de-
(the utilization bound is improved by 69%). The reason for creased because U lub = 0.69, however, the algorithms still
this big improvement is that decreasing LSW will make the achieve a significant improvement compared to the case of
contribution of Imax higher on Equation (7) and only the using M T Umax .
iterative procedure in the algorithms decrease Imax .
Comparing the results of Study 3 and Study 1 in Ta-
ble 1, it is clear that the number of messages does not have 9 Summary
a significant effect on the results. When increasing the num-
ber of messages, the utilization bound decreases slightly be- In this paper, we have studied the effect of MTU size
cause it may increase the number of packets which increases on the schedulability of the FTT-SE protocol. Reducing120% [3] M. Bertogna, G. Buttazzo, M. Marinoni, G. Yao,
100%
F. Esposito, and M. Caccamo. Preemption points
placement for sporadic task sets. In Proceedings of
80%
the 2010 22nd Euromicro Conference on Real-Time
60% MaxMTU Systems, ECRTS ’10, pages 251–260, 2010.
Optimal
40%
Simplified [4] Jianxin Chen, Ling Gong, Yuhang Yang, and Peng
20% Zeng. Average performance of packet network. In
Proc. of the 6th Int. Conference on ITS Telecommuni-
0%
0,23 0,24 0,25 0,26 0,27 0,28 0,29 0,3 0,31 0,32
cations, pages 515–518, 2006.
Uset [5] Christopher A. Kent and Jeffrey C. Mogul. Fragmen-
tation considered harmful. In ACM SIGCOMM, pages
Figure 6: The results of Study 5.
390–401, 1987.
[6] S.T. Kondoz A.M. Kodikara, C.K. Worrall. Optimal
MTU on one hand reduces the idle time that is imposed settings of maximum transfer unit (mtu) for efficient
to prevent scheduling windows overrun, and on the other wireless video communications. In Proc. of IEE Com-
hand it increases the number of packets that in its turn in- munications, pages 648–654, 2005.
creases the protocol overhead. This paper introduced such a
tradeoff and presented two algorithms to select the value of [7] R. Marau, N. Figueiredo, R. Santos, P. Pedreiras,
MTU. The first algorithm finds an optimal value that maxi- L. Almeida, and T. Nolte. Server-based Real-Time
mizes the schedulability of messages but exhibits relatively Communications on Switched Ethernet. In Proc. of
high computational complexity. The second algorithm finds Int. Workshop on Compositional Theory and Tech-
sub-optimal solutions with lower computational complex- nology for Real-Time Embedded Systems, December
ity (O(N )). We have evaluated the improvements that can 2008.
be achieved using the algorithms through a comprehensive
[8] R. Marau, P. Pedreiras, and L. Almeida. Signal-
simulation study. The results of the simulations show that
ing asynchronous traffic over a Master-Slave Switched
the algorithms can significantly increase the schedulability
Ethernet protocol. In Proc. on the 6th Int. Workshop
of the real-time messages compared to the case when max-
on Real Time Networks (RTN’07), Pisa, Italy, 2 July
imum MTU is used. In addition, the results show that the
2007.
performance of the algorithm that finds sub-optimal solu-
tions is as good as the other algorithm. [9] Ricardo Marau, Luı́s Almeida, Karthik Lakshmanan,
In this paper, we considered the effect of MTU on Raj Rajkumar, and Paulo Pedreiras. Utilization-based
the scheduling of downlinks. however, the impact on the Schedulability Analysis for Switched Ethernet aim-
scheduling of uplinks is similar. As a future work we ing Dynamic QoS Management. In Proc of the 15th
would like to include the scheduling of uplinks and down- IEEE Conference on Emerging Technologies and Fac-
links when evaluating the optimal MTU. This work can tory Automation (ETFA’10), 2010. Submitted.
also be extended to include Server-SE protocol [7] in which
real-time messages are scheduled using server based tech- [10] Ricardo Marau, Luı́s Almeida, and Paulo Pedreiras.
niques. Optimizing the MTU will have a significant effect Enhancing real-time communication over COTS Eth-
on the scheduling of servers, specially for the cases when ernet switches. In Proc. of the IEEE Int. Workshop on
the servers capacity is small. Factory Communication Systems (WFCS’06), pages
295–302, June 2006.
References [11] TTTech. TTEthernet.
http://www.tttech.com/solutions/ttethernet/, Novem-
[1] Ethernet Powerlink - online information. ber 2008.
http://www.ethernet-powerlink.org/.
[2] Luı́s Almeida and José Alberto Fonseca. Analysis
of a Simple Model for Non-Preemptive Blocking-
Free Scheduling. In Proc. of the 13th EUROMICRO
Conference on Real-Time Systems (ECRTS’01), June
2001.You can also read