A Robot Cluster for Reproducible Research in Dexterous Manipulation
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
A Robot Cluster for Reproducible Research in Dexterous Manipulation
Manuel Wüthrich∗1 and Felix Widmaier∗1 and Stefan Bauer∗2
and Niklas Funk†3 and Julen Urain De Jesus†3 and Jan Peters†3 and Joe Watson†3
and Claire Chen†4 and Krishnan Srinivasan†4 and Junwu Zhang†4 and Jeffrey Zhang†4
and Matthew R. Walter†5 and Rishabh Madan†9 and Charles Schaff†5 and Takahiro Maeda†5
and Takuma Yoneda†5 and Denis Yarats†6 and Arthur Allshire†7 and Ethan K. Gordon †8
and Tapomayukh Bhattacharjee†9 and Siddhartha S. Srinivasa†8 and Animesh Garg†7
and Annika Buchholz1 and Sebastian Stark1 and Thomas Steinbrenner1 and Joel Akpo1
and Shruti Joshi1 and Vaibhav Agrawal1 and Bernhard Schölkopf1
arXiv:2109.10957v1 [cs.RO] 22 Sep 2021
Abstract— Dexterous manipulation remains an open problem only to a limited degree to real robots. Therefore, the robotics
in robotics. To coordinate efforts of the research community community has recently proposed a number of open-source
towards tackling this problem, we propose a shared benchmark. platforms for robotic manipulation [28], [1], [27]. These
We designed and built robotic platforms that are hosted at
the MPI-IS1 and can be accessed remotely. Each platform robots can be built by any lab to reproduce results of other
consists of three robotic fingers that are capable of dexterous labs. While this is a large step towards a shared benchmark,
object manipulation. Users are able to control the platforms it requires effort by the researchers to set up and maintain
remotely by submitting code that is executed automatically, the system, and it is nontrivial to ensure a fully standardized
akin to a computational cluster. Using this setup, i) we host setup.
robotics competitions, where teams from anywhere in the world
access our platforms to tackle challenging tasks, ii) we publish Therefore, we provide remote access to dexterous manip-
the datasets collected during these competitions (consisting of ulation platforms hosted at MPI-IS, see Figure 1 (interested
hundreds of robot hours), and iii) we give researchers access researchers can contact us to request access). This allows
to these platforms for their own projects. for an objective evaluation of robot-learning algorithms on
real-world platforms with minimal effort for the researchers.
I. I NTRODUCTION In addition, we publish a large dataset of these platforms
Dexterous manipulation is humans’ interface to the physical interacting with objects, which we collected during a recent
world. Our ability to manipulate objects around us in a competition we hosted. During this competition, teams from
creative and precise manner is one of the most apparent across the world developed algorithms for challenging object
distinctions between human and animal intelligence. The manipulations tasks, which yielded a very diverse dataset
impact robots with a similar level of dexterity would have on containing meaningful interactions. Finally, we also provide a
our society cannot be overstated. They would likely replace simulation of the robotic setup, allowing for research into
humans in most tasks that are primarily physical, such as sim-to-real transfer. All the code is open-source.
working at production lines, packaging, constructing houses, In the rest of the paper, we describe the robotic hardware
agriculture, cooking, and cleaning. Yet, robotic manipulation and the software interface which allows easy robot access,
is still far from the level of dexterity attained by humans, similarly to a computational cluster. We also describe the
as witnessed by the fact that these are still mostly carried robot competition we hosted and the data we collected in the
out by humans. This problem has been remarkably resistant process.
to the rapid progress of machine learning over the past
II. R ELATED W ORK
years. A factor that has been crucial for progress in machine
learning, but nonexistent in real-world robotic manipulation, In the past years, a large part of the RL community has
is a shared benchmark. Benchmarks allow for different focused on simulation benchmarks, such as the deepmind
labs to coordinate efforts, reproduce results and measure control suite [25] or OpenAI gym [8] and extensions thereof
progress. Most notably, in the area of image processing, [30]. These benchmarks internally use physics simulators,
such benchmarks were crucial for the rapid progress of typically Mujoco [26] or PyBullet [12].
deep learning. More recently, simulation benchmarks have These commonly accepted benchmarks allowed researchers
been proposed in reinforcement learning (RL) [8], [25]. from different labs to compare their methods, reproduce
However, methods that are successful in simulators transfer results, and hence build on each other’s work. Very impressive
results have been obtained through this coordinated effort
∗ Equal contribution † Challenge participant [17], [14], [24], [20], [18], [13], [19].
1 Max-Planck-Institute for Intelligent Systems 2 KTH Stockholm
3 TU Darmstadt 4 Stanford University 5 TTI Chicago In contrast, no such coordinated effort has been possible
6 New York University 7 University of Toronto on real robotic systems, since there is no shared benchmark.
8 University of Washington 9 Cornell University This lack of standardized real-world benchmarks has been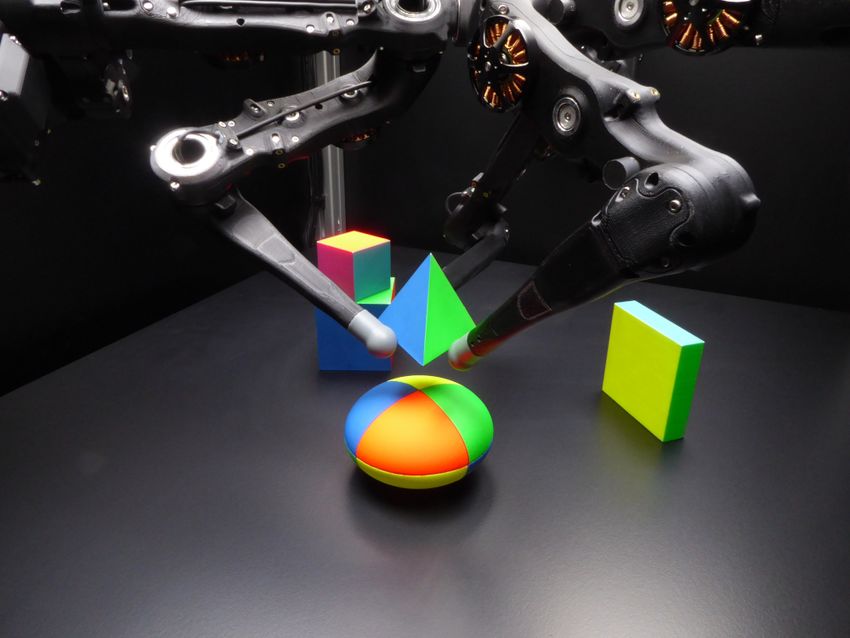
(a) (b)
(c) (d)
Fig. 1: The dexterous robotic platforms hosted at MPI-IS. Users can submit code which is then executed autmatically.
recognized by the robotics and RL community [6], [7], [9], Driving Olympics [2] twice per year. However, a remote
[10], [4], [21]. Recently, there have been renewed efforts to benchmark for robotic manipulation accessible to researchers
alleviate this problem: around the world is still missing. Therefore we propose such
a) Affordable Open-Source Platforms:: The robotics a system herein.
community recently proposed affordable open-source robotic
platforms that can be built by users. For instance, [28] III. ROBOTIC P LATFORMS
propose Replab, a simple, low-cost manipulation platform
that is suitable for benchmarking RL algorithms. Similarly, We host 8 robotic platforms at MPI-IS (see Figure 1),
[1] propose a simple robotic hand and quadruped that remote users can submit code which is then assigned to a
can be built from commercially available modules. CMU platform and executed automatically, akin to a computational
designed LoCoBot, a low-cost open-source platform for cluster. Users have access to the data collected during
mobile manipulation. [16] propose an open-source quadruped execution of their code. Submission and data retrieval can be
consisting of off-the-shelf parts and 3D-printed shells. Based automated to allow for RL methods that alternate between
on this design, [27] developed an open-source manipulation policy evaluation and policy improvement.
platform consisting of three fingers capable of complex The platforms we use here are based on an open-source
dexterous manipulation (here, we use an industrial-grade design that was published recently [27]. The benefits of this
adaptation of this design). design are
Such platforms are beneficial for collaboration and repro- • Dexterity: The robot design consists of three fingers and
ducibility across labs. However, setting up and maintaining has the mechanical and sensorial capabilities necessary
such platforms often requires hardware experts and is time- for complex object manipulation beyond grasping.
intensive. Furthermore, there are necessarily small variations • Safe Unsupervised Operation: The combination of
across labs that may harm reproducibility. To overcome these robust hardware and safety checks in the software allows
limitations, the robotics community has proposed a number users to run even unpredictable algorithms without
of remote robotics benchmarks. supervision. This enables, for instance, training of deep
b) Remote Benchmarks:: For mobile robotics, [23] neural networks directly on the real robot.
propose the Robotarium, a remotely accessible swarm robotics • Ease of Use: The C++ and Python interfaces are simple
research platform. Similarly, Duckietown [22] hosts the AI and well-suited for RL as well as optimal control at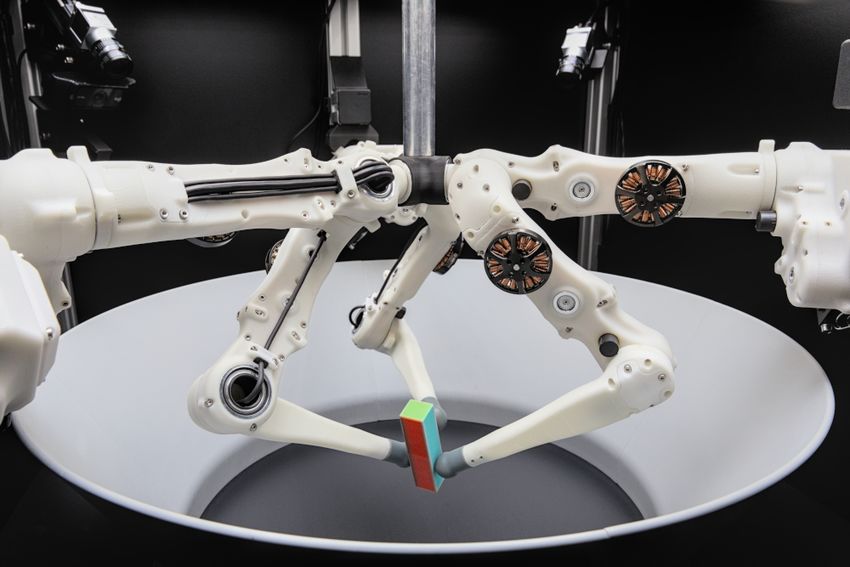
rates up to 1 kHz. For convenience, we also provide a 15 # Compute next action using some control policy
simulation (PyBullet) environment of the robot. . The different observation values are listed
separately for illustration.
Here, we use an industrial-grade adaptation of this hardware 16 torque = control_policy(
(see Figure 1) to guarantee an even longer lifetime and 17 robot_obs.position,
18 robot_obs.velocity,
higher reproducibility. In addition, we developed a submission 19 robot_obs.torque,
system to allow researchers from anywhere in the world to 20 robot_obs.tip_force,
submit code with ease. 21 camera_obs.cameras[0].image,
22 camera_obs.cameras[1].image,
23 camera_obs.cameras[2].image,
A. Observations and Actions 24 camera_obs.object_pose.position,
25 camera_obs.object_pose.orientation,
Actions: This platform consists of 3 fingers, each with 26 )
3 joints, yielding a total of 9 degrees of freedom (and 9 27 action = robot_interfaces.trifinger.Action(
corresponding motors). There are two ways of controlling the 28 torque=torque)
robot: One can send 9-dimensional torque-actions which are
At the end of each job, the recorded data is stored and
directly executed by the motors. Alternatively, we provide
provided to the user, who can then analyse it and use it,
the option of using position-actions (9-dimensional as well),
for example, to train a better policy. Users can automate
which are then translated to torques by an internal controller.
submissions and data retrieval to run RL algorithms directly
The native control rate of the system is 1kHz, but one can
on the robots.
control at a lower rate, if so desired.
Observations: An observation consists of proprioceptive
IV. T HE R EAL ROBOT C HALLENGE
measurements, images and the object pose inferred using an
object tracker. The proprioceptive measurements are provided Using the robotic platforms described in Section III, we
at a rate of 1 kHz and contain the joint angles, joint organized the "Real Robot Challenge 2020", a competition
velocities, joint torques (each 9 dimensional) and finger which ran from August to December 2020. The participants
tip forces (3 dimensional). There are three cameras placed were able to access the robots remotely via the submission
around the robot. The camera images are provided at 10 Hz system described in Section III-B. Thus teams from all around
and have a resolution of 270x270 pixels. In addition, our the world were able to participate, allowing them to work
system also contains an object tracker, which provides the with real robots, even if they do not have access to one locally
pose of the object being manipulated along with the images. (or were locked out of their labs due to the Covid pandemic).
Their algorithms generated a large dataset rich in contact
B. Submitting Code interactions, which we make publicly available. Currently,
We use HTCondor1 to provide a cluster-like system where we are hosting another edition of this challenge.
users can submit jobs which are then automatically executed
on a randomly-selected robot. During execution, a backend A. Phases and Tasks
process automatically starts the robot, monitors execution The challenge was split into three phases:
and records all actions and observations. The users only use
the simple frontend interface to send actions to and retrieve • Phase 1: In the first phase, the participants had to
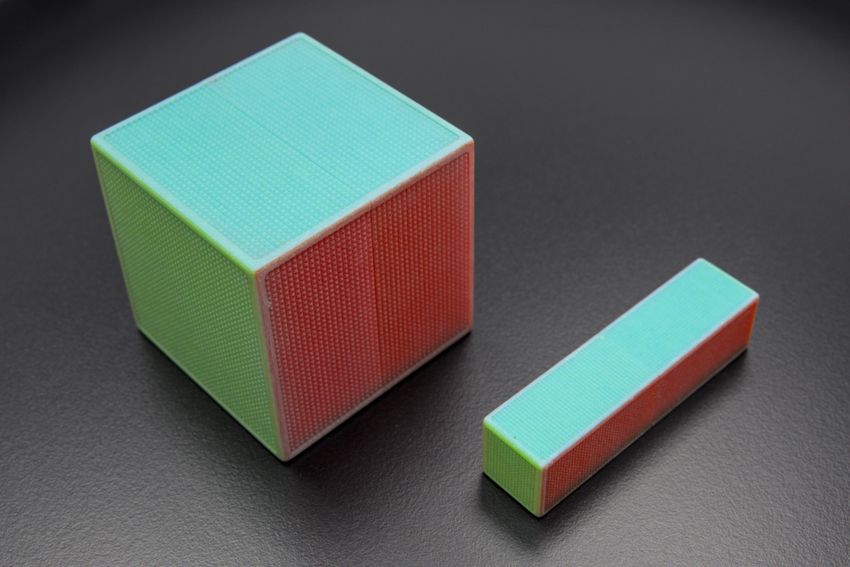
observations from the robot (see [27] for more details). manipulate a 65 mm cube in simulation. There was no
Below is a minimal example of actual user code in Python. restriction on who could participate, this phase served
It creates a frontend-interface to the robot and uses it to send as a qualification round before giving the participants
torque commands that are computed by some control policy access to the real robots.
based on the observations: • Phase 2: The teams that achieved promising results in
the first phase were given access to the real robots where
1 # Initialise front end to interact with the robot. the same task had to be solved.
2 robot = robot_fingers.TriFingerPlatformFrontend()
3
• Phase 3: For the last phase, the cube was replaced by a
4 # Create a zero-torque action to start with smaller, elongated cuboid (20x20x80 mm) that is more
5 action = robot_interfaces.trifinger.Action() difficult to grasp and manipulate.
6
7 while True: Figure 2 shows pictures of the different phases and the objects
8 # Append action to the "action queue". Returns that were used.
the time step at which the given action will be
executed. In all three phases, the task was to move the object
9 t = robot.append_desired_action(action) from its initial position at the center of the workspace to a
10
11 # Get observations of time step t. Will block
randomly sampled goal. In each phase, there were four levels
and wait if t is in the future. of difficulty corresponding to different goal distributions:
12 robot_obs = robot.get_robot_observation(t)
13 camera_obs = robot.get_camera_observation(t)
• Level 1: The goal is randomly sampled on the table.
14 The orientation is not considered. For this level it is
not necessary to lift the object, so it can be solved by
1 https://research.cs.wisc.edu/htcondor pushing.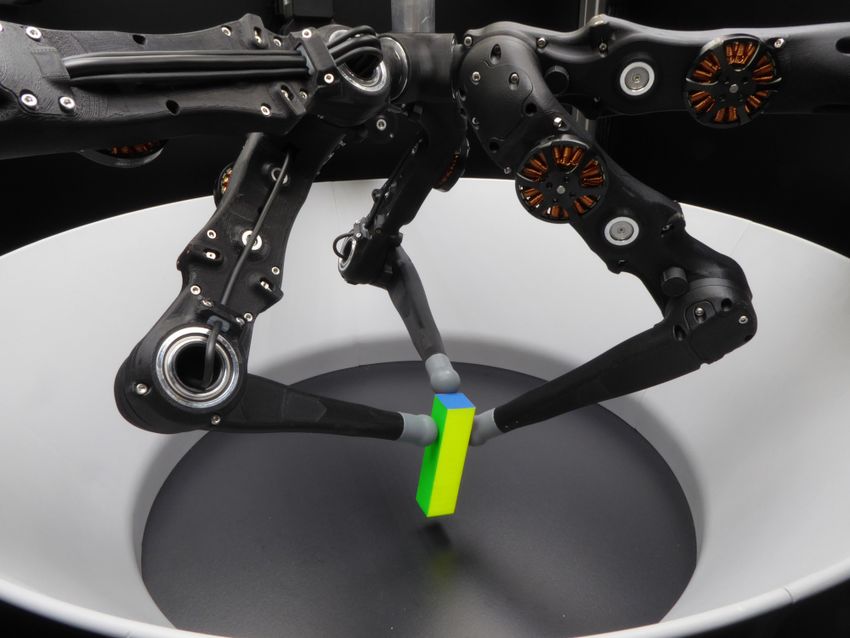
B. Evaluation
In phase 1, we used an episode length of 15 s (3750 steps
at 250 Hz). In phases 2 and 3, this was increased to 2 min
(120000 steps at 1 kHz) so that the users had enough time
on the real robots.
We defined the performance of an episode as the cumulative
P
reward, i.e. the sum rewards across all time-steps R = t rt .
In the following, we describe the reward functions (for a
single time step) used in the different levels.
(a) Phase 1 - Simulation
1) Reward for Levels 1-3: For difficulty levels 1-3, we
only considered position error (i.e. orientation is ignored).
We used a weighted sum of the Euclidean distance on the
x/y-plane and the absolute distance along the z-axis. Both
components are scaled based on their expected range. Since
the z-range is smaller, this means that the height has a higher
weight. The sum is again rescaled so that the total error is in
the interval [0, 1].
Given goal position pg = (xg , yg , zg ), actual position pa =
(xa , ya , za ), arena diameter d and maximum expected height
h, the position error epos is computed as
(b) Phase 2 - Cube !
p
1 (xg − xa )2 + (yg − ya )2 |zg − za |
epos = + (1)
2 d h
The arena diameter is d = 0.39, matching the inner diameter
of the arena boundary, and the maximum height is h = 0.1.
We compute the reward r by simply negating the error
r = −epos .
2) Reward for Level 4:
a) Phases 1 and 2:: For level 4, we considered both
position and orientation.
(c) Phase 3 - Cuboid We compute the position error epos as in the previous level,
according to (1). For the orientation, we first compute the
rotation q = (qx , qy , qz , qw ) (given as quaternion) that would
have to be applied to the actual orientation to obtain the
goal orientation. We then compute the angle of this rotation,
divided by π to normalize to the interval [0, 1]:
2 · atan2(k(qx , qy , qz )k, |qw |)
erot = . (2)
π
For the total reward r we sum the two errors, rescale again
to the interval [0, 1] and negate so that a higher reward means
(d) Objects used in phases 2 and 3. lower error
Fig. 2: Illustration of the different challenge phases and the
objects that were used. epos + epos
r=− . (3)
2
b) Phase 3:: We found that for the narrow cuboid used
• Level 2: The object has to be lifted to a fixed goal in phase 3, our object tracking method was unreliable with
position 8cm above the table center. The orientation is respect to the rotation around the long axis of the cuboid.
not considered. To prevent this from affecting the reward computation, we
• Level 4: The goal is randomly sampled somewhere changed the computation of the rotation error to use only the
within the arena with an height of up to 10 cm. The absolute angle between the long axes of the cuboid in goal
orientation is not considered. and actual pose. This is again divided by π for normalisation.
• Level 5: As level 3, but in addition to the position, a The reward is then computed in the same way as above, using
goal orientation is sampled uniformly. (3).
3) Evaluating Submissions: Since there is randomness in with this, we provide a database containing the metadata and
each execution due to the randomly-sampled goal and small metrics of all episodes. This allows to filter the data before
changes in initial configuration of the object and robot, we downloading.
need to average a number of episodes to approximate the The dataset itself, the tools for filtering the episodes as
expected reward. At the end of each real-world phase, the well as a more technical description of the data format can
code of each team was executed for multiple goals of each be found at https://people.tuebingen.mpg.de/
difficulty level (we use the same goals across all users to mpi-is-software/data/rrc2020.
reduce variance). The average cumulative rewards
P4 Ri for the 1) Data Description: For each episode, the following
different levels i are then aggregated by i=1 i · Ri . This information is stored:
weighted sum gives a higher weight to higher (more difficult) • all robot and camera observations (including object pose
levels, encouraging teams to solve them. information) as well as all actions (see Section III-A)
• camera calibration parameters
C. Challenge Results
• the goal pose that was used in this episode
After the simulation stage, seven teams with excellent • metadata such as timestamp, challenge phase, etc.
performance qualified for the real-robot phases. These teams • several metrics that can be used to filter the dataset:
made thousands of submissions to the robots, corresponding
– cumulative reward
to approximately 250 hours of robot-run-time (see Figure 3
– baseline reward obtained if the object were not
for submission statistics). Tables I and II show the final
moved during the whole episode
evaluation results of phases 2 and 3 (the scores in these
– initial distance to goal
tables are computed as described in Section IV-B). The top
– closest distance to goal throughout the episode
teams in both phases found solutions that successfully grasp
– maximum height of the object throughout the
the object and move it to the goal position. Videos published
episode
by the winning teams are available on YouTube2 . They also
– largest distance to initial position throughout the
published reports describing their methods [29], [5], [11] and
episode
open-sourced their code3 .
We collected all the data produced during the challenge and Any user-specific information, such as names or custom output
aggregated it into a dataset, which is described in Section IV- of the user code, are not included in the dataset.
D. 2) Data Format: The data is provided in two different
1) The Winning Policies: The winning teams used similar formats:
methods for solving the task: They made use of motion 1) The original log files as they were generated by the
primitives that are sequenced using state machines. For robot. This includes files in a custom binary format that
difficulty level 4, where orientation is important, they typically requires the use of our software to read them (available
first perform a sequence of motions to rotate the object to be for C++ and Python).
roughly in the right orientation before lifting it to the goal 2) Zarr4 storages created from the original files. This can
position. For details regarding their implementations, please be easily read in Python using the Zarr package.
refer to [29], [5], [11], [3]. Further [15] contains a more For a more technical description please refer to the dataset
detailed description of the solutions of some of the teams. website.
D. The Dataset V. C ONCLUSION
The dataset contains the recorded data of all jobs that were We designed and built a robot cluster to facilitate repro-
executed during phases 2 and 3 of the challenge. Combined ducible research into dexterous robotic manipulation. We
with the runs from the weekly evaluation rounds, this results believe that this cluster can greatly enhance coordination and
in 2856 episodes of phase 2 and 7422 episodes of phase 3. collaboration between researchers all across the world. We
The data of each episode can be downloaded individually. hosted competitions on these robot to advance state-of-the-
The compressed file size of one episode is about 250 MB. art and to produce publicly-available datasets that contain
We expect that users of the dataset will typically not use rich interactions between the robots and external objects. In
all episodes (which would be a large amount of data), but addition, we provide scientists with access to the platforms
select those that are interesting for their project. To help for their own research project. This is especially beneficial
2 ardentstork: https://youtube.com/playlist?list= for researchers which would otherwise not have access to
PLBUWL2_ywUvE_czrinTTRqqzNu86mYuOV such robots.
troubledhare: https://youtube.com/playlist?list=
PLEYg4qhK8iUaXVb1ij18pVwnzeowMCpRc R EFERENCES
sombertortoise: https://youtu.be/I65Kwu9PGmg
3 ardentstork: https://github.com/ripl-ttic/ [1] Michael Ahn, Henry Zhu, Kristian Hartikainen, Hugo Ponte, Abhishek
real-robot-challenge Gupta, Sergey Levine, and Vikash Kumar. Robel: Robotics benchmarks
troubledhare: https://github.com/madan96/rrc_example_ for learning with low-cost robots. arXiv preprint arXiv:1909.11639,
package 2019.
sombertortoise: https://github.com/stanford-iprl-lab/
rrc_package 4 https://zarr.readthedocs.io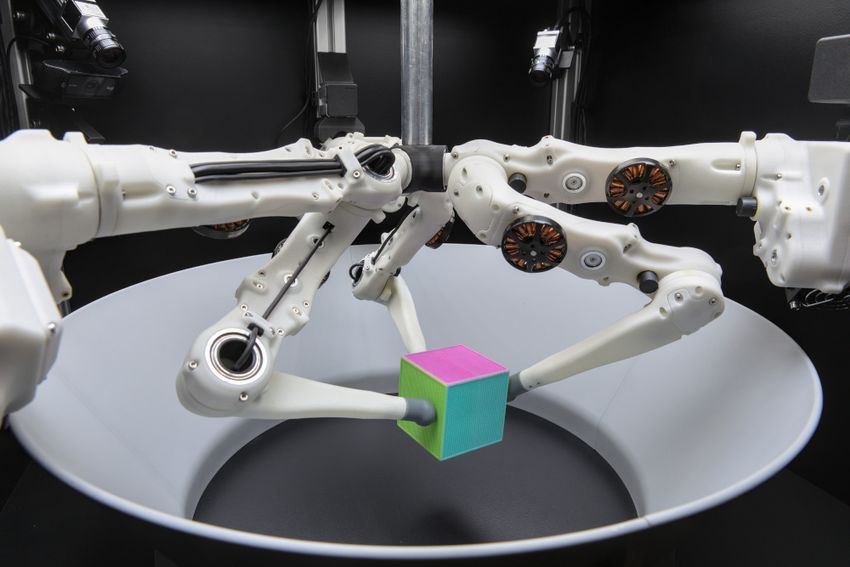
TABLE I: Final Evaluation of Phase 2
# Username Level 1 Level 2 Level 3 Level 4 Total Score
1. ardentstork -5472 -2898 -9080 -21428 -124221
2. troubledhare -3927 -4144 -4226 -48572 -219182
3. sombertortoise -8544 -15199 -14075 -44989 -261123
4. sincerefish -6278 -13738 -17927 -49491 -285500
5. hushedtomatoe -17976 -41389 -41832 -60815 -469509
6. giddyicecream -22379 -46650 -41655 -61845 -488023
TABLE II: Final Evaluation of Phase 3
# Username Level 1 Level 2 Level 3 Level 4 Total Score
1. ardentstork -9239 -4040 -6525 -25625 -139394
2. sombertortoise -5461 -8522 -10323 -36135 -198016
3. sincerefish -7428 -25291 -26768 -52311 -347560
4. innocenttortoise -16872 -31977 -33357 -55611 -403344
5. hushedtomatoe -18304 -31917 -36835 -60219 -433521
6. troubledhare -18742 -42831 -36272 -56503 -439233
7. giddyicecream -33329 -57372 -53694 -59734 -548090
400
ardentstork
giddyicecream troubledhare
sincerefish
troubledhare giddyicecream
Number of submissions
300 hushedtomatoe 493
sombertortoise 220 sombertortoise
ardentstork
180
837 hushedtomatoe
200 87
1249
100
0 sincerefish
4 9 4 9 3 8 3
0-1 0-1 0-2 0-2 1-0 1-0 1-1
0-1 0-1 0-1 0-1 0-1 0-1 0-1
202 202 202 202 202 202 202
(a) Phase 2
ardentstork
500 giddyicecream giddyicecream
sincerefish ardentstork
innocenttortoise
Number of submissions
400 troubledhare
863 748 sombertortoise
hushedtomatoe
sombertortoise 271 troubledhare
300
242
85
2 innocenttortoise
hushedtomatoe
200
3530
100
0 sincerefish
6 1 6 1 6 1
1-1 1-2 1-2 2-0 2-0 2-1
0-1 0-1 0-1 0-1 0-1 0-1
202 202 202 202 202 202
(b) Phase 3
Fig. 3: Number of submissions over time (left, one bar corresponds to one day) and per team (right).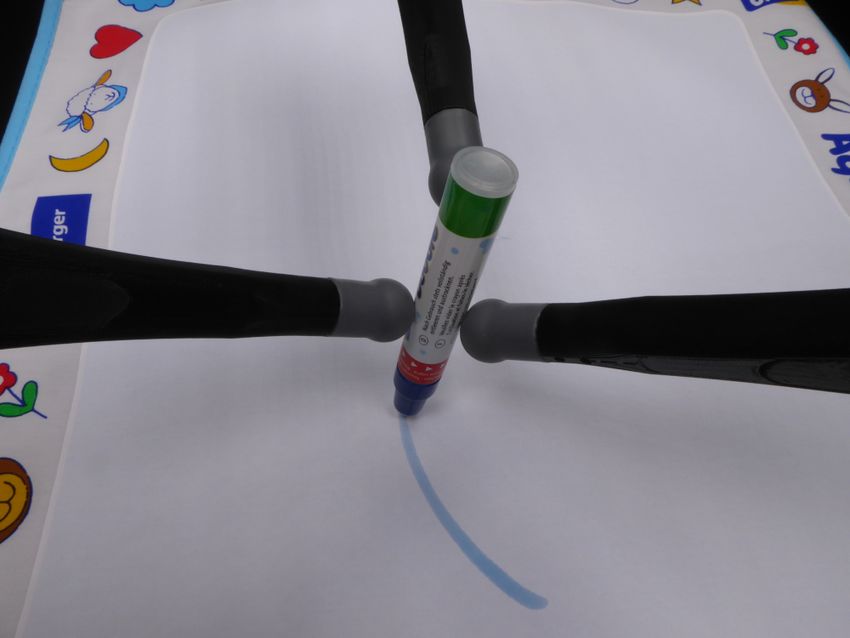
[2] AI-DO: AI Driving Olympics – Duckietown. Website. https://www. editors, Proceedings of The 33rd International Conference on Machine
duckietown.org/research/ai-driving-olympics. Ac- Learning, volume 48 of Proceedings of Machine Learning Research,
cessed: 2021-8-27. pages 1928–1937, New York, New York, USA, 2016. PMLR.
[3] Arthur Allshire, Mayank Mittal, Varun Lodaya, Viktor Makoviychuk, [21] Adithyavairavan Murali, Tao Chen, Kalyan Vasudev Alwala, Dhiraj
Denys Makoviichuk, Felix Widmaier, Manuel Wüthrich, Stefan Bauer, Gandhi, Lerrel Pinto, Saurabh Gupta, and Abhinav Gupta. PyRobot:
Ankur Handa, and Animesh Garg. Transferring dexterous manipulation An Open-source Robotics Framework for Research and Benchmarking.
from gpu simulation to a remote real-world trifinger. arXiv preprint June 2019.
arXiv:2108.09779, 2021. [22] Liam Paull, Jacopo Tani, Heejin Ahn, Javier Alonso-Mora, Luca
[4] F Amigoni, E Bastianelli, J Berghofer, A Bonarini, G Fontana, Carlone, Michal Cap, Yu Fan Chen, Changhyun Choi, Jeff Dusek,
N Hochgeschwender, L Iocchi, G Kraetzschmar, P Lima, M Mat- Yajun Fang, Daniel Hoehener, Shih-Yuan Liu, Michael Novitzky,
teucci, P Miraldo, D Nardi, and V Schiaffonati. Competitions for Igor Franzoni Okuyama, Jason Pazis, Guy Rosman, Valerio Varricchio,
Benchmarking: Task and Functionality Scoring Complete Performance Hsueh-Cheng Wang, Dmitry Yershov, Hang Zhao, Michael Benjamin,
Assessment. IEEE robotics & automation magazine / IEEE Robotics Christopher Carr, Maria Zuber, Sertac Karaman, Emilio Frazzoli,
& Automation Society, 22(3):53–61, September 2015. Domitilla Del Vecchio, Daniela Rus, Jonathan How, John Leonard, and
[5] Anonymous. Real robot challenge phase 2: Manipulating objects using Andrea Censi. Duckietown: An open, inexpensive and flexible platform
high-level coordination of motion primitives. In Submitted to Real for autonomy education and research. In 2017 IEEE International
Robot Challenge 2020, 2020. under review. Conference on Robotics and Automation (ICRA), pages 1497–1504,
[6] Sven Behnke. Robot competitions-ideal benchmarks for robotics May 2017.
research. In Proc. of IROS-2006 Workshop on Benchmarks in Robotics [23] Daniel Pickem, Paul Glotfelter, Li Wang, Mark Mote, Aaron Ames,
Research. Institute of Electrical and Electronics Engineers (IEEE), Eric Feron, and Magnus Egerstedt. The robotarium: A remotely
2006. accessible swarm robotics research testbed. In 2017 IEEE International
[7] F Bonsignorio and A P del Pobil. Toward Replicable and Measurable Conference on Robotics and Automation (ICRA), pages 1699–1706.
Robotics Research [From the Guest Editors]. IEEE robotics & IEEE, 2017.
automation magazine / IEEE Robotics & Automation Society, 22(3):32– [24] Ivaylo Popov, Nicolas Heess, Timothy Lillicrap, Roland Hafner, Gabriel
35, September 2015. Barth-Maron, Matej Vecerik, Thomas Lampe, Yuval Tassa, Tom Erez,
[8] Greg Brockman, Vicki Cheung, Ludwig Pettersson, Jonas Schneider, and Martin Riedmiller. Data-efficient Deep Reinforcement Learning
John Schulman, Jie Tang, and Wojciech Zaremba. Openai gym. arXiv for Dexterous Manipulation. April 2017.
preprint arXiv:1606.01540, 2016. [25] Yuval Tassa, Yotam Doron, Alistair Muldal, Tom Erez, Yazhe Li,
[9] B Calli, A Walsman, A Singh, S Srinivasa, P Abbeel, and A M Diego de Las Casas, David Budden, Abbas Abdolmaleki, Josh Merel,
Dollar. Benchmarking in Manipulation Research: Using the Yale-CMU- Andrew Lefrancq, et al. Deepmind control suite. arXiv preprint
Berkeley Object and Model Set. IEEE robotics & automation magazine arXiv:1801.00690, 2018.
/ IEEE Robotics & Automation Society, 22(3):36–52, September 2015. [26] Emanuel Todorov, Tom Erez, and Yuval Tassa. Mujoco: A physics
[10] Berk Calli, Aaron Walsman, Arjun Singh, Siddhartha Srinivasa, Pieter engine for model-based control. In 2012 IEEE/RSJ International
Abbeel, and Aaron M Dollar. Benchmarking in Manipulation Research: Conference on Intelligent Robots and Systems, pages 5026–5033. IEEE,
The YCB Object and Model Set and Benchmarking Protocols. February 2012.
2015. [27] Manuel Wüthrich, Felix Widmaier, Felix Grimminger, Joel Akpo, Shruti
[11] Claire Chen, Krishnan Srinivasan, Jeffrey Zhang, Junwu Zhang, Lin Joshi, Vaibhav Agrawal, Bilal Hammoud, Majid Khadiv, Miroslav
Shao, Shenli Yuan, Preston Culbertson, Hongkai Dai, Mac Schwager, Bogdanovic, Vincent Berenz, Julian Viereck, Maximilien Naveau,
and Jeannette Bohg. Dexterous manipulation primitives for the real Ludovic Righetti, Bernhard Schölkopf, and Stefan Bauer. TriFinger:
robot challenge, 2021. An Open-Source Robot for Learning Dexterity. In Proceedings of the
[12] Erwin Coumans and Yunfei Bai. Pybullet, a python module for physics Conference on Robot Learning (CoRL), August 2020.
simulation for games, robotics and machine learning. GitHub repository, [28] Brian Yang, Jesse Zhang, Vitchyr Pong, Sergey Levine, and Dinesh
2016. Jayaraman. Replab: A reproducible low-cost arm benchmark platform
[13] Yan Duan, Xi Chen, Rein Houthooft, John Schulman, and Pieter Abbeel. for robotic learning. arXiv preprint arXiv:1905.07447, 2019.
Benchmarking deep reinforcement learning for continuous control. In [29] Takuma Yoneda, Charles Schaff, Takahiro Maeda, and Matthew Walter.
International Conference on Machine Learning, pages 1329–1338, Grasp and motion planning for dexterous manipulation for the real
2016. robot challenge, 2021.
[14] Scott Fujimoto, Herke van Hoof, and David Meger. Addressing [30] Iker Zamora, Nestor Gonzalez Lopez, Victor Mayoral Vilches, and
Function Approximation Error in Actor-Critic Methods. February Alejandro Hernandez Cordero. Extending the openai gym for robotics:
2018. a toolkit for reinforcement learning using ros and gazebo. arXiv
preprint arXiv:1608.05742, 2016.
[15] Niklas Funk, Charles Schaff, Rishabh Madan, Takuma Yoneda, Julen
Urain De Jesus, Joe Watson, Ethan K. Gordon, Felix Widmaier, Stefan
Bauer, Siddhartha S. Srinivasa, Tapomayukh Bhattacharjee, Matthew R.
Walter, and Jan Peters. Benchmarking structured policies and policy
optimization for real-world dexterous object manipulation, 2021.
[16] Felix Grimminger, Avadesh Meduri, Majid Khadiv, Julian Viereck,
Manuel Wüthrich, Maximilien Naveau, Vincent Berenz, Steve Heim, Fe-
lix Widmaier, Jonathan Fiene, Alexander Badri-Spröwitz, and Ludovic
Righetti. An Open Torque-Controlled Modular Robot Architecture
for Legged Locomotion Research. In International Conference on
Robotics and Automation (ICRA), 2020.
[17] Tuomas Haarnoja, Aurick Zhou, Pieter Abbeel, and Sergey Levine.
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement
Learning with a Stochastic Actor. January 2018.
[18] Nicolas Heess, T B Dhruva, Srinivasan Sriram, Jay Lemmon, Josh
Merel, Greg Wayne, Yuval Tassa, Tom Erez, Ziyu Wang, S M
Ali Eslami, Martin Riedmiller, and David Silver. Emergence of
Locomotion Behaviours in Rich Environments. July 2017.
[19] Peter Henderson, Riashat Islam, Philip Bachman, Joelle Pineau, Doina
Precup, and David Meger. Deep reinforcement learning that matters.
In Thirty-Second AAAI Conference on Artificial Intelligence, 2018.
[20] Volodymyr Mnih, Adria Puigdomenech Badia, Mehdi Mirza, Alex
Graves, Timothy Lillicrap, Tim Harley, David Silver, and Koray
Kavukcuoglu. Asynchronous Methods for Deep Reinforcement
Learning. In Maria Florina Balcan and Kilian Q Weinberger,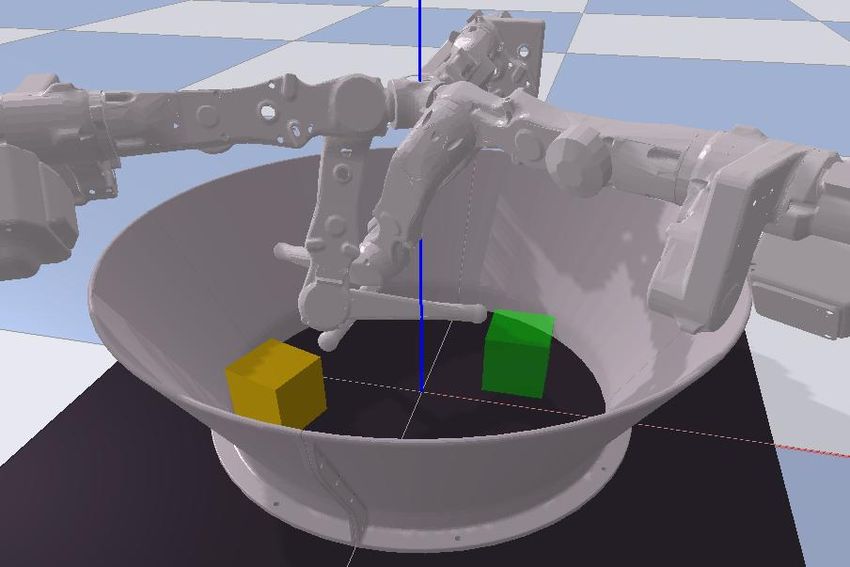
You can also read

















































