A Fuzzy Soft Model for Haze Pollution Management in Northern Thailand - Hindawi
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Hindawi Advances in Fuzzy Systems Volume 2020, Article ID 6968705, 13 pages https://doi.org/10.1155/2020/6968705 Research Article A Fuzzy Soft Model for Haze Pollution Management in Northern Thailand 1,2 Parkpoom Phetpradap 1 Department of Mathematics, Faculty of Science, Chiang Mai University, Chiang Mai 50200, Thailand 2 Centre of Excellence in Mathematics, CHE, Si Ayutthaya Rd., Bangkok 10400, Thailand Correspondence should be addressed to Parkpoom Phetpradap; parkpoom.phetpradap@cmu.ac.th Received 27 June 2019; Revised 18 January 2020; Accepted 23 January 2020; Published 11 March 2020 Academic Editor: Jose A. Sanz Copyright © 2020 Parkpoom Phetpradap. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In this article, we propose fuzzy soft models for decision making in the haze pollution management. The main aims of this research are (i) to provide a haze warning system based on real-time atmospheric data and (ii) to identify the most hazardous location of the study area. PM10 is used as the severity index of the problem. The efficiency of the model is justified by the prediction accuracy ratio based on the real data from 1st January 2016 to 31st May 2016. The fuzzy soft theory is modified in order to make models more suitable for the problems. The results show that our fuzzy models improve the prediction accuracy ratio compared to the prediction based on PM10 density only. This work illustrates a fuzzy analysis that has the capability to simulate the unknown relations between a set of atmospheric and environmental parameters. The study area covers eight provinces in the northern region of Thailand, where the problem severely occurs every year during the dry season. Seven principle parameters are considered in the model, which are PM10 density, air pressure, relative humidity, wind speed, rainfall, temperature, and topography. 1. Introduction forest fires, solid waste burning, and agricultural residue field burning [5, 6]. Pollution problems are inevitably a global concern of the 21st This problem has a significant effect on human health, century. Over the past decade, polluted haze has become a local traveling industry, and the economy as a whole, espe- major problem in the northern region of Thailand and cially in Chiang Mai province, a popular tourist destination. surrounded countries. In March 2019, the problem reached a The public health ministry of Thailand has reported an crisis when the daily average PM2.5 and PM10 (particulate increase in bronchial asthma and respiratory diseases in matter of 2.5 microns and 10 microns in diameter or people living in these areas. In addition, these fine particles smaller) density rates were well beyond the national stan- contain carcinogenic polycyclic aromatic hydrocarbons that dard of 25 μg/m3 and 50 μg/m3 for several days according to can induce lung cancer [7]. The smoke haze episodes also local environmental data sources such as Pollution Control reduce visibility and cause a variety of environmental effects Department [1], Climate Change Data Centre of Chiang Mai which eventually leads to decline in various economic University [2], and Smoke Haze Integrated Research Unit sectors such as tourism, transportation, and agriculture. Thai [3]. This situation has occurred every year on dry season, government has launched various policies to get the smoke from January to May, and generally reached its peak in haze problem under control. However, the problem still March. During this period, a large amount of particulate continues to grow, even with the enforcement of outdoor matters are released into the atmosphere, including carbon burning ban issued by Thai government during February to monoxide, carbon dioxide, volatile organic compounds, and April period. carcinogenic polycyclic aromatic hydrocarbons [4]. The Apparently, the atmospheric parameters and topography main emission source is biomass open burning, such as play the key parts of the problem. The air pollutants are
2 Advances in Fuzzy Systems trapped near ground level due to the meteorological con- Then, we present our decision-making results and discussion ditions (e.g., stagnant air), and the basin-like topography in Section 4. Finally, the conclusion is given in Section 5. surrounded by high mountain ranges results in restricted pollution dispersion. Moreover, low rainfall in dry season 2. Methodology also adds on to the severity of the haze problem. For this reason, the leaching of smoke or dust particles in the air is 2.1. Fuzzy Soft Theory. In this section, we provide useful low [6]. These conditions caused the air pollutants to flow notations of soft sets and fuzzy soft sets. Let out difficultly and the particle cannot be easily escaped from U � L1 , L2 , . . . , Lm be an initial universal set and let E � the area. Notably, there are some technologies that mitigate P1 , P2 , . . . , Pn be a set of parameters. the pollution problem. However, the costs of devices are considerably expensive. Definition 1 (see [8]). Let P(U) denote the power set of U Undoubtedly, an efficient warning system would become and A ⊂ E. A pair (F, A) is called a soft set over U, where F a major help in the haze problem management. The system is a mapping given by F : A ⟶ P(U). will significantly improve public safety and mitigate damage caused. The Goddard Earth Observing System Model Ver- Example 1. Let the initial universe U � L1 , L2 , . . . , L8 be sion 5 (GEOS-5) is currently one of the widely used pollution the eight selected provinces in the northern region of prediction models developed by NASA’s research team. Thailand: Mae Hong Son, Chiang Mai, Lamphun, Chiang In this article, the potential use of fuzzy soft set theory in Rai, Phayao, Lampang, Phrae, and Nan. Moreover, let E � real-time haze warning is investigated. The main aims of this P1 , P2 , P3 , P4 be atmospheric parameters: PM10 density, research are (i) to provide a haze warning system based on air pressure, relative humidity, and wind speed, respectively. real-time atmospheric data and (ii) to identify the most Then, an example of possible soft set is hazardous location of the study area. The benefits are to create the awareness for people in the affected area and to F P1 � L1 , L2 , L3 , suggest the location to establish pollution mitigation devices. F P2 � L2 , L4 , L7 , L8 , Molodtsov [8–10] initiated the concept of soft set theory as a (1) new mathematical tool for dealing with uncertainties. Soft F P3 � L1 , L5 , L6 , L8 , set theory has rich potential for applications in several di- F P4 � L4 , L7 . rections, a few of which had been shown by Molodtsov [8]. The idea of applying fuzzy soft set theory in atmospheric Note that each approximation has two parts, predicate p models is already considered concerning the applications to and approximate value set. For example, the predicate is air pollution management [11–14] and water management PM10 density and the approximate value set is L1 , L2 , L3 [15–20]. However, it is believed that air pollution models for F(P1 ). Additionally, the summary information of this may be different for each region due to many several factors soft set is represented in Table 1. [21, 22]. Therefore, existing models still need to be restudied. Up to our knowledge, there are only a few prediction models Definition 2 (see [25]). Let Ψ(U) denote the set of all fuzzy in the region of study since the main concerns are on the site sets of U and let Ai ⊂ E. A pair (Fi , Ai ) is called a fuzzy soft of environmental science. The prediction results from set over U, where Fi is a mapping given by GEOS-5 model are popular choices to be used as bench- Fi : Ai ⟶ Ψ(U). marks for environmental scientist. The regional-developed models include a logistic regression model [23] and Geo- Example 2. We consider the same setup as in Example 1. An graphic Information System- (GIS-) based model [24]. example of a fuzzy soft set is Therefore, our model would offer an alternative prediction model for the haze pollution problem. L1 L L L L L L L F P1 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , The study location covered eight provinces in the 0.7 0.9 1 0.4 0.2 0.3 0.4 0.5 northern part of Thailand where haze problem has severely L1 L L L L L L L occurred: Mae Hong Son, Chiang Mai, Lamphun, Chiang F P2 � , 2 , 3 , 4 , 5 L5 /0, 6 , 7 , 8 , 0.5 0.8 0.1 1 0.2 0.3 0.6 1 Rai, Phayao, Lampang, Phrae, and Nan. The density of PM10 L1 L L L L L L L is used as severity index of the haze pollution level. Addi- F P3 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , tionally, seven principle parameters are considered in the 0.8 0.2 0.1 0 0.9 0.7 0.2 0.8 model: six are atmospheric parameters—PM10, air pressure, L1 L L L L L L L F P4 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 . relative humidity, wind speed, rainfall, and temper- 0.2 0.4 0.4 0.7 1 0.5 0.6 0.4 ature—and the other one is the topographic parameter. All (2) atmospheric data are obtained from the Pollution Control Department [1]. The obtained data period is from 1st January Table 2 provides the summary information of this fuzzy 2016 to 31st May 2016. soft set. The rest of this article is organized as follows. In Section 2, we explain the methodology and present some examples. Definition 3. For a given fuzzy soft set with a universal set U In Section 3, we describe the setup of the model, which and parameter set P, we denote lij as the membership value includes the study location, the data, and the parameters. of Li in F(Pj ).
Advances in Fuzzy Systems 3
Table 1: Tabular presentation of the soft set in Example 1. n
Di � eij . (5)
Label PM10 density Air pressure Humidity Wind speed i�1
L1 1 0 1 0
L2 1 1 0 0 (iii) The score value of Li is defined as
L3 1 0 0 0
L4 0 1 0 1
L5 0 0 1 0
L6 0 0 1 0
ci � Ii − Di . (6)
L7 0 1 0 1
Both values can be used as evaluations in a decision
L8 0 1 1 0
making. However, according to Kong et al. [26], it is possible
that these values may lead to different decision results.
Therefore, they introduced grey relational grade, a new
Table 2: Tabular presentation of the fuzzy soft set in Example 2.
evaluation indicator that combines both information of
Label PM10 density Air pressure Humidity Wind speed score values and choice values, to make the decision making
L1 0.7 0.5 0.8 0.2 more robust. The calculation algorithm of grey relational
L2 0.9 0.8 0.2 0.4 grade is briefly presented.
L3 1 0.1 0.1 0.4
L4 0.4 1 0 0.7
L5 0.2 0 0.9 0.1 Algorithm 1 (see [26]). Decision making based on grey
L6 0.3 0.3 0.7 0.5 relational grade.
L7 0.4 0.6 0.2 0.6
(1) Input the choice value sequence (c1 , c2 , . . . , cm ) and
L8 0.5 1 0.8 0.4
the score sequence (s1 , s2 , . . . , sm ) where ci and si
are the choice value and the score value of Li ,
respectively.
Definition 4 (see [25]). For a given fuzzy soft set, the choice
value of Li is defined by (2) Calculate grey relational generating values:
n
ci � lij . (3)
j�1
ci − min ci
i
c′i � ,
max ci − min ci
i i
Definition 5 (see [25]). For a given fuzzy soft set, the (7)
comparison table is the n × n table, in which the entry eij is si − min si
i
s′i � .
the number of parameters for which the membership value max si − min{s}
i i
of Li exceeds or equals the membership value of Lj . Both row
and column of the table are labelled by the elements of the
universal set. (3) Calculate grey difference information:
Remark 1 ′
cmax � max c′i ,
i
(1) Each main diagonal element of a comparison table is
always equal to n. Δc′i � c′max − c′i ,
(2) 0 ≤ eij ≤ n for all i, j ′
smax � max s′i ,
i
(8)
′ − s′i ,
Δs′i � smax
Definition 6 (see [25])
Δmax � max Δc′i, Δs′i ,
i
(i) Impact indicator of Li is the sum of all values on row i
on the comparison table. This can be calculated by the Δmin � min Δc′i, Δs′i .
i
following formula:
(4) Calculate grey relative coefficients:
n
Ii � eij . (4)
j�1 Δmin + 0.5Δmax
cc ci � ,
Δc′i + 0.5Δmax
(ii) Divider indicator of Lj is the sum of all values on (9)
Δ + 0.5Δmax .
column j on the comparison table. This can be cs si � min
calculated by the following formula: Δs′i + 0.5Δmax4 Advances in Fuzzy Systems (5) Calculate grey relational grade: indicator and weighted divider indicator associated with the weight w. c Li � 0.5cc ci + 0.5cs si . (10) Apparently, if w � (1, 1, 1, . . . , 1), the weighted choice values and the weight score values are equal to the choice values and the score values defined in Definitions 4 and 6. (6) The decision is Lk if c(Lk ) � maxi c(Li ) . Optimal choices may have more than one if there are more than one element corresponding to the maximum. Example 3. In a decision-making problem with U � L1 , L2 , . . . , L8 , E � P1 , P2 , . . . , P8 , define the Decision making based on score values and choice values weight w � (3, 2, 1, 2, 2, 1, 1, 2). Suppose that a fuzzy soft relies on the assumption that the parameters are equally set is important. However, in some decision-making problems, some parameters can be more important than the others. L1 L L L L L L L F P1 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , Therefore, we propose new definitions of choice values and 0.7 0.9 1 0.4 0.2 0.3 0.4 0.5 score values based on weight information. Note that idea of L1 L L L L L L L weighted score value is briefly discussed in Maji et al. [9]. F P2 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 0.5 0.8 0.1 1 0 0.3 0.6 1 Define a weight w :� (w1 , w2 , . . . , wn ) as weight se- L1 L L L L L L L quence of parameters where wi is the weight associated with F P3 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , the parameter Pi . 0.8 0.2 0.1 0 0.9 0.7 0.2 0.8 L1 L L L L L L L F P4 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , Definition 7. For a given fuzzy soft set and a weight w, the 0.2 0.4 0.4 0.7 1 0.5 0.6 0.4 weighted choice value of Li is defined by L1 L L L L L L L n F P5 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 0.4 0.2 0.8 0.9 0.2 0.4 0.7 0.7 cw,i � wj lij . (11) j�1 L1 L L L L L L L F P6 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 0.5 0.1 0.1 0.3 0.5 0.7 1 0.5 L1 L L L L L L L Definition 8. For a given fuzzy soft set and a weight w, the F P7 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 0.5 0.5 0.4 0.8 0.2 0.4 0.2 0.7 weighted comparison table is the n × n table, in which the entry eij is calculated by the following formula: L1 L L L L L L L F P8 � , 2 , 3 , 4 , 5 , 6 , 7 , 8 . n 0.75 1 1 0.75 0.75 0.5 0.75 0.75 eij � wj 1 lik ≥ ljk , (12) (14) i�1 Our aim is to choose the optimum choice according to where 1(·) is an indicator function defined by the weight w. By Definition 7, the weighted choice value 1, if the statement A is true, sequence is (7.6, 8.3, 8.2, 9, 4.3, 6.1, 7.9, 8.7). Next, we 1(A) � (13) calculate weighted score value. By Definition 8, the weighted 0, otherwise. comparison table is shown in Table 3. Then, by Definition 9, In other words, this is the weighted sum of parameters the weighted impact indicator, the weighted divider which the membership value of Li exceeds or equals the indicator, and the weighted score values are shown in membership value of Lj . Both row and column of the table Table 4. The weighted score value sequence is are labelled by the elements of the universal set. (− 1, 13, 18, 31, − 60, − 29, 9, 19). Finally, we make a deci- sion based on grey relational grade. The calculation of Al- gorithm 1 is shown in Table 5. Therefore, L4 is the optimal Remark 2 choice. (1) Each main diagonal element of a weighted com- parison table is always equal to the sum k wk . (2) 0 ≤ eij ≤ k wk for all i, j. 2.2. Particle Swarm Optimization. The particle swarm op- timization (PSO) algorithm is a metaheuristic algorithm based on the concept of swarm intelligence. The algorithm Definition 9 was proposed in 1995 by Kennedy and Eberhart [27]. PSO is metaheuristic as it makes few or no assumptions about the (i) A weighted impact indicator is the impact indicator problem being optimized and can search very large spaces of that is calculated based on the weighted comparison candidate solutions. Also, PSO does not use the gradient of table associated with the weight w. the problem being optimized, which means PSO does not (ii) A weighted divider indicator is the divider indicator require that the optimization problem be differentiable as is that is calculated based on the weighted comparison required by classic optimization methods such as gradient table associated with the weight w. descent and quasi-Newton methods. Also, it is capable of (iii) The weighted score values of Li are the score values solving complex mathematics problems existing in engi- that are calculated based on the weighted impact neering [28].
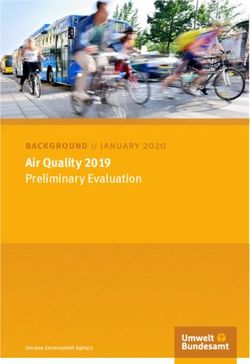
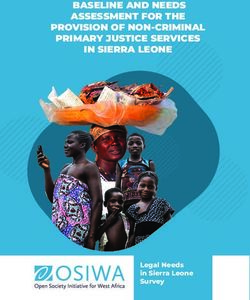
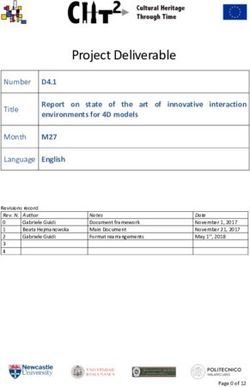
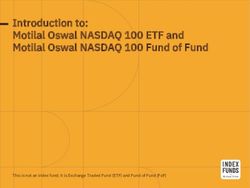
Advances in Fuzzy Systems 5 Table 3: The weighted comparison table in Example 3. Phi Pan Nam in the east. All studied provinces lie between L1 L2 L3 L4 L5 L6 L7 L8 these basins. The elevations are generally moderate, a little above 2,000 metres (6,600 ft) for the highest summit. Table 6 L1 14 5 5 7 13 11 7 6 provides the geographic information summary of each L2 10 14 9 6 12 8 9 7 province. The latitudes and longitudes shown are the lo- L3 9 10 14 6 12 8 8 9 cations of meteorology stations where atmospheric data are L4 9 8 8 14 12 12 12 9 L5 4 4 2 4 14 3 4 3 collected. The basin sizes are divided into five categories: no L6 5 6 7 2 11 14 2 4 basin, wide, normal, moderate, and narrow, and we set the L7 9 6 6 7 13 12 14 7 airflow difficulty level of each category to be 0, 1, 2, 3, and 4, L8 9 9 7 7 11 12 9 14 respectively. The narrow basin implies that the flow of the air is more difficult. The location map of study area is shown in Figure 1. Table 4: The weighted impact indicator, the weighted divider indicator, and the weighted score values of each choice in Example 3.2. The Data. The hourly atmospheric data of PM10 density 3. (μg/m3, at 3 m from ground), air pressure (mmHg, at 2 m), Iw,i Dw,i sw,i relative humidity (%RH, at 2 m), wind speed (m/s at 30 m), L1 68 69 −1 rainfall (mm at 3 m), and temperature (°C at 2 m) from 1st L2 75 62 13 January 2016 to 31st May 2016 were obtained with autho- L3 76 58 18 rization from the Pollution Control Department [1]. About L4 84 53 31 3% of data was missing from the record. The missing data L5 38 98 − 60 were replaced by the same data at the preceding time. L6 51 80 − 29 Figure 2 represents the daily fluctuation of PM10 density of L7 74 65 9 the eight selected locations during the study period. Table 7 L8 78 59 19 represents the summary statistics of PM10 density of the eight selected locations. Table 5: The calculation of grey relational grade based on the weighted choice value sequence and the weighted score value se- 3.3. The Parameters. Based on environmental research quence in Example 3. studies [30–33], the climate and the topography of the study area play significant roles in the pollution problem. ′ cw,i ′ sw,i Δcw,i Δsw,i ccw (ci ) csw (s) cw (Li ) Therefore, the parameter set consists of seven parameters in L1 0.702 0.648 0.298 0.352 0.627 0.587 0.607 this application, which are PM10 density, air pressure, L2 0.851 0.802 0.149 0.198 0.770 0.717 0.744 relative humidity, wind speed, rainfall, temperature, and L3 0.830 0.857 0.170 0.143 0.746 0.778 0.762 airflow difficulty level. The first six parameters are atmo- L4 1 1 0 0 1 1 1 spheric parameters, while the last parameter is topographic L5 0 0 1 1 0.333 0.333 0.333 parameter. Additionally, the effects of each atmospheric L6 0.383 0.341 0.617 0.659 0.448 0.431 0.439 components on the PM10 density, the severity index, can be L7 0.766 0.758 0.234 0.242 0.681 0.674 0.678 L8 0.936 0.868 0.064 0.132 0.887 0.791 0.839 categorized into two types; positive and negative. A positive atmospheric component is the component such that in- creasing in its value will lead to the increase of the PM10 This method is now available to use in computer density, while a negative atmospheric component is the packages such as Matlab or R. component such that increasing in its value will lead to the decrease of the PM10 density. The parameter information is 3. Model Construction summarised in Table 8. 3.1. The Study Area. Our study area is in the northern region 4. Results and Discussion of Thailand, the haze pollution affected area. The region, approximately 94,000 km2 in size and six million in pop- 4.1. Haze Warning System. The first aim of this research is to ulation, consists of nine provinces: Mae Hong Son, Chiang create a warning system based on real-time atmospheric Mai, Lamphun, Chiang Rai, Phayao, Lampang, Phrae, Nan, data. The system predicts whether the PM10 density will and Uttaradit. For this case study, Uttaradit was excluded exceed the crisis level or not in the following 4 hours. Note since its haze problem was not severe. The study area is that the length of warning period can be adjusted. In this geographically characterised by several mountain ranges, article, we choose the period of 4 hours since the period of which continue from the Shan Hills in bordering Myanmar time is reasonable enough to do some safety mitigation such to Laos, and the river valleys which cut through them. The as buying protection masks, completing necessary outdoor basins of rivers Ping, Wang, Yom, and Nan run from north activities, or evacuating to public designated safe zones. The to south. The basins cut across the mountains of two great warnings will be set to be announced at 12 a.m., 4 a.m., 8 ranges, the Thanon Thong Chai Range in the west and the p.m., 4 p.m., 8 p.m., and 12 p.m. each day. The PM10 crisis
6 Advances in Fuzzy Systems Table 6: Geographic information summary of the study area. Label Province Latitude Longitude Approximate height above sea level (m) Basin size Airflow difficulty level L1 Mae Hong Son 19.137805 97.975261 330 Moderate 3 L2 Chiang Mai 18.837539 98.971612 310 Narrow 4 L3 Lamphun 18.657448 99.020208 290 Narrow 4 L4 Chiang Rai 19.932397 99.799329 410 Moderate 3 L5 Phayao 19.211871 100.209360 400 Moderate 3 L6 Lampang 18.278623 99.506985 235 Normal 2 L7 Phrae 19.714564 100.180450 155 Moderate 3 L8 Nan 18.814173 100.781905 250 Normal 2 Figure 1: The study area: eight selected provinces in the northern region of Thailand. The figure is obtained from Samphutthanon et al. [29]. PM10 density rate in the study area 300.00 250.00 PM10 density (μg/m3) 200.00 150.00 100.00 50.00 0.00 1 January 2016 1 February 2016 1 March 2016 1 April 2016 1 May 2016 Date Mae Hong Son (L1) Chiang Rai (L4) Phrae (L7) Chiang Mai (L2) Phayao (L5) Nan (L8) Lamphun (L3) Lampang (L6) Figure 2: PM10 density rate of the eight selected locations from 1st January 2016 to 31st May 2016.
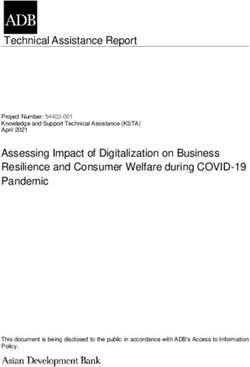
Advances in Fuzzy Systems 7 Table 7: The summary statistics of PM10 density of the eight selected locations from 1st January 2016 to 31st May 2016. Location Min Median Max Average S.D. L1 4.25 61.75 385.00 76.18 57.86 L2 2.00 66.25 256.50 69.98 37.44 L3 1.00 69.75 225.50 71.11 36.52 L4 3.00 66.38 373.00 75.59 55.01 L5 1.50 67.50 280.00 73.24 47.31 L6 3.50 79.50 206.75 78.14 38.92 L7 8.25 77.50 230.75 77.84 38.35 L8 3.75 64.75 252.50 69.58 42.21 All locations 1.00 69.00 385.00 74.01 44.98 Table 8: Parameter information summary of the haze pollution problem. Label Parameters Parameter types Effects (for atmospheric parameters) P1 PM10 density Atmospheric Positive P2 Air pressure Atmospheric Positive P3 Relative humidity Atmospheric Positive P4 Wind speed Atmospheric Negative P5 Rainfall Atmospheric Negative P6 Temperature Atmospheric Negative P7 Airflow difficulty level Topographic N/A level is set at 120 μg/m3 based on Thailand national ambient air quality standard [34]. Table 9: The accuracy ratio of the haze warning system by Algorithm 3. The threshold value α out of 120 μg/m3 4.1.1. Warning System Based on PM10 Density. The trivial Location 70% 80% 90% 95% 98% warning system is a warning that relies on the information of L1 80.46 85.84 89.46 90.34 90.89 the PM10 density only. That is, a warning is signaled when L2 79.36 86.39 90.12 92.21 92.86 the PM10 density at current time exceeds a certain threshold L3 76.29 86.39 91.66 92.32 92.97 value. The warning system is generated by Algorithm 2. L4 78.59 85.07 89.02 88.91 91.88 L5 78.49 85.29 89.02 90.12 89.79 Algorithm 2. Haze warning system based on PM10 density. L6 67.29 76.51 84.96 86.39 87.27 L7 69.81 82.11 88.04 90.12 91.22 (1) At the warning time, input PM10 density data of L8 77.06 83.32 88.14 90.78 91.00 each location. The inputted data are the average of Average 75.92 83.86 88.80 90.15 90.99 hourly data of the components in the preceding 4 hours. (2) A warning is signaled if the PM10 density of the system, the fuzzy soft set with weighted information can be location exceeds the threshold value α. comprised. Note that the fuzzy soft set without weights is not The efficiency of the algorithm is evaluated by the ac- suitable for this model. This is due to the fact that the curacy ratio compared to the real data. The prediction is importance of the parameters is not the same. For instance, counted as accurate if the warning is signaled and the PM10 PM10 density parameter is the most important parameter density in the next 4 hours exceeds 120 μg/m3 or the warning than the other parameters for the reason that no haze is not signaled and the PM10 density in the next 4 hours does problem will occur if the PM10 density amount is low. It not exceed 120 μg/m3. We test the algorithm with should be noted that the membership values of the atmo- α � 84, 96, 108, 114 and 118 which are, respectively, 70%, spheric parameters change in every warning based on the 80%, 90%, 95%, and 98% of the crisis level. The accuracy real-time data, while the topographic parameter remains the ratios of each threshold values are shown in Table 9. The plot same throughout the time period. Additionally, when the between the average accuracy ratio of all eight locations and weighted information is w � (1, 0, . . . , 0), this warning the threshold values is shown in Figure 3. It can be seen that system turns out to be the warning system based on PM10 the best threshold value for these data is 118 (98% of the density defined in Section 4.1.1. crisis level) with 90.99% accuracy ratio. The choice values are used in decision making. For this system, a warning is signaled when the weighted choice values at current time exceed a certain threshold value. 4.1.2. Warning System Based on Fuzzy Soft Set with Weighted Our proposed decision making for the warning system Information. To improve the efficiency of the warning with weighted information is as follows.
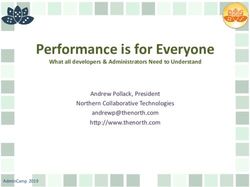
8 Advances in Fuzzy Systems The average accuracy ratio for each threshold values 91.50 91.00 Average accuracy ratio (%) 90.50 90.00 89.50 89.00 88.50 88.00 87.50 87.00 108 110 112 114 116 118 120 122 Threshold values Figure 3: The plot between the average accuracy ratio of the eight selected locations and the threshold values. Algorithm 3. Haze warning system based on weighted (3) Calculate the weighted choice values according to choice values. the weight information w of each location. (1) At the warning time, input the atmospheric data of (4) A warning is signaled if the choice values of the each location: PM10 density, air pressure, relative location exceed the threshold value α where humidity, wind speed, rain, and temperature. The 0 ≤ α ≤ 1. inputted data are the average of hourly data of the components in the preceding 4 hours. Additionally, The flowchart of Algorithm 3 is given in Figure 4. input the weight information w � (w1 , w2 , . . . , w7 ). Clearly, the accuracy ratio of the model depends on the weight information and the threshold value. The calculation (2) Calculate the membership values of the parameters examples when weighted information is w1 � (1, 1, 1, 1, of the fuzzy soft set: 1, 1, 1),w2 � (5, 2, 1, 2, 2, 1, 2), w3 � (10, 2, 1, 2, 2, 1, 2),w4 � (i) For PM10 density parameter, the membership (15, 2, 1, 2, 2, 1, 2), and w5 � (20, 2, 1, 2, 2, 1, 2) are shown in values are calculated from Table 10. In these examples, the threshold value is set to be 90% of the possible maximum values, which depend on the weight information. ⎪ ⎧ x Since the aim of this problem is to find the weight in- ⎪ ⎪ , x < 120, ⎨ 120 formation and the threshold value that give the best accuracy μF (x) � ⎪ (15) ⎪ ⎪ ratio, this problem coincides with the optimization problem: ⎩ 1, x ≥ 120, max Average accuracy ratio, w1 , w2 , . . . , w7 are integers where x is the inputted PM10 density data. (ii) For the other positive atmospheric parameters, the 0 ≤ w1 ≤ 30 (18) subject to membership values are calculated from 0 ≤ w2 , w3 , . . . , w7 ≤ 10 α � 0, 0.01, 0.02, . . . , 0.99, 1. x− m μF (x) � , (16) By employing the particle swarm optimization method M− m in Matlab programme, the optimum average accuracy ratio where x is the inputted atmospheric component is 92.12% with the optimum weight (17, 0, 0, 2, 3, 0, 0) and data and m and M are the minimum value and the the optimum threshold α � 0.98. This optimum result is maximum value of the atmospheric component shown in Table 11. during January to May 2016, respectively. (iii) For negative atmospheric parameters, the mem- 4.2. Identification of the Most Hazardous Location. The bership values are calculated from second aim of this research is to identify the location with the most serious haze pollution problem based on real-time at- mospheric data. The location is identified at the same time as the M− x μF (x) � , (17) warning. The effective prediction will benefit the community in M− m the affected area and assist the authority to provide safety aids and prepare helping devices such as mobile air purifier. where x, m, and M are defined in (ii) (iv) For the topographic parameters, the membership values are 0, 0.25, 0.5, 0.75, and 1 when the airflow 4.2.1. Identification of the Most Hazardous Location Based on difficulty levels are 0, 1, 2, 3, and 4, respectively. PM10 Density. Similar to Section 4.1.1, the simple decision
Advances in Fuzzy Systems 9 Table 10: The accuracy ratio of the haze warning system by Al- Table 11: The optimum average accuracy ratio of the haze warning gorithm 3 with weight information. The threshold value of each system based on Algorithm 3. weight is set to be 90% of the possible maximum. Threshold value α � 0.98 Location Weight information w � (17, 0, 0, 2, 3, 0, 0) (%) Location w1 (%) w2 (%) w3 (%) w4 (%) w5 (%) L1 92.11 L2 94.08 L1 83.75 89.13 90.34 90.45 90.34 L3 93.97 L2 91.33 91.33 91.33 91.33 92.97 L4 93.65 L3 91.22 91.22 91.22 93.85 92.97 L5 91.56 L4 85.18 85.18 85.51 88.58 88.80 L6 88.16 L5 84.52 84.52 84.52 84.52 85.40 L7 91.23 L6 85.73 85.73 85.73 85.73 85.73 L8 92.22 L7 87.49 87.49 87.49 87.49 89.79 Average 92.12 L8 89.24 89.24 89.24 89.24 89.13 Average 87.31 87.98 88.17 88.90 89.39 (1) At the warning time, input PM10 density data of each location. The inputted data are the average of hourly data of the components in the preceding 4 hours. Input atmospheric data (2) The decision is Lk , the location with the maximum value of PM10 density at current time. Optimal choices may have more than one if there are more than one element corresponding to the maximum. The efficiency of the algorithm is evaluated by the ac- Calculate membership values of curacy ratio compared to the real data. The prediction is parameters counted as accurate if the most severe location in the next 4 hours is correctly identified. By making decision based on Algorithm 4, the average accuracy ratio from eight locations is 51.15% and Cohen’s kappa index of agreement is 0.4312. Calculate weighted choice values 4.2.2. Identification of the Most Hazardous Location Based on Fuzzy Soft Set with Weighted Information. The fuzzy soft set with weighted information can be comprised in order to improve the efficiency of the decision makings. With a similar reason to Section 4.1.2, the fuzzy soft set with weight is more suitable. Note that the membership values of the atmospheric parameters change in every decision making Is the weight choice value more than the Yes Warning signal based on the real-time data, while the topographic parameter threshold? remains the same throughout the time period. Additionally, when the weighted information is w � (1, 0, . . . , 0), this decision making turns out to be the warning system based on PM10 density defined in Section 4.2.1. It should be em- No phasized that the membership calculation of PM10 density parameter is different from Algorithm 3. This is because we need to make a comparison of location. No warning signal Finally, the evaluation of decision making must be chosen. Note that it can be evaluated based on choice values, Figure 4: Flowchart of Algorithm 3. score values, or grey relation grade. In our result, we will use all three evaluations in order to choose which evaluation gives the best result. making is to choose a location based on the information of Our proposed algorithm for decision making of the most PM10 density only. That is, the location with the highest hazardous location based on weighted choice values is as value of PM10 density at current time is chosen as the most follows. hazardous location in the following 4 hours. The algorithm of the decision making is as follows. Algorithm 5. Identification of the most hazardous location based on weighted choice values. Algorithm 4. Identification of the most hazardous location (1) At the warning time, input the atmospheric data of based on PM10 density each location: PM10 density, air pressure, relative
10 Advances in Fuzzy Systems humidity, wind speed, rain, and temperature. The Input atmospheric data inputted data are the average of hourly data of the components in the preceding 4 hours. Additionally, input the weight information w � (w1 , w2 , . . . , w7 ). (2) Calculate the membership values of the parameters Calculate membership values of parameters of the fuzzy soft set: (i) For positive atmospheric parameters, the mem- bership values are calculated from Calculate weighted choice values or weighted score values or grey relational grade x− m μF (x) � , (19) M− m where x is the inputted atmospheric component data The most hazardous locations is chosen based on and m and M are the minimum value and the the evaluation basis maximum value of the atmospheric component during January to May 2016, respectively. Figure 5: Flowchart of Algorithm 5. (ii) For negative atmospheric parameters, the mem- bership values are calculated from grey relational grades is 56.58%, 57.13%, and 57.02%, re- M− x spectively. The summary of the optimum result is shown in μF (x) � , (20) M− m Table 13. Cohen’s kappa of the decision making based on weighted choice values, weighted score values, and grey where x, m, and M are defined in (i). relational grades is 0.4457, 0.4521, and 0.4489, respectively. (iii) For the topographic parameters, the membership values are 0, 0.25, 0.5, 0.75, and 1 when the airflow difficulty levels are 0, 1, 2, 3, and 4, respectively. 4.3. Discussion (3) Calculate the weighted choice values cw . 4.3.1. Haze Warning System. By introducing the fuzzy soft (4) The decision is Lk if cw (Lk ) � maxi cw (Li ) . Opti- model with weighted information, the prediction accuracy mal choices may have more than one if there are ratio of the warning system is improved slightly from 90.99% more than one element corresponding to the to 92.12% compared to the simple warning system that only maximum. considers the PM10 density. Moreover, it is clear that the fuzzy soft models with weighted information provide better The flowchart of Algorithm 5 is given in Figure 5. prediction than the original (equal weight) fuzzy soft model. Table 14 shows the parameters’ weights that provide the best Remark 3. If the decision making is based on weighted score accuracy ratio. Note that the principal parameters are PM10 values sw or grey relational grades cw , then Step 3 and Step 4 density, rainfall, and wind speed, respectively, while the of Algorithm 5 will be changed accordingly. other parameters have no weight. This suggests that a simple Clearly, the accuracy ratio of the model depends on the judgment on the warning can be done by observing only weight information. Table 12 displays the accuracy ratio of PM10 density, wind speed, and rainfall. The problem is the location identification by Algorithm 5 where the decision expected to be severe if PM10 density is high, with no wind makings are based on choice values, score values, and grey and no rain. This agrees with the principle study in envi- relational grades. The weighted information are w1 � ronmental science research. (1, 1, 1, 1, 1, 1, 1), w2 � (5, 2, 1, 2, 2, 1, 2), w3 � (10, 2, 1, 2, 2, 1, 2), w4 � (15, 2, 1, 2, 2, 1, 2) and w5 � (20, 2, 1, 2, 2, 1, 2). 4.3.2. Identification of the Most Hazardous Location. By Since our desire of this problem is to find the weight selecting the most severe location based on the information information that gives the best accuracy ratio, this is similar from PM10 density only, the accuracy ratio is 51.12%. to the optimization problem: However, this ratio is improved to 57.13% when the loca- tions are chosen by the fuzzy weight model. The decision max Average accuracy ratio, making is decided by weighted score values. Table 15 shows w1 , w2 , . . . , w7 are integers the parameters’ weights that provide the best accuracy ratio. (21) Based on the optimal parameters’ weights, this would subject to 0 ≤ w1 ≤ 30 imply the following: 0 ≤ w2 , w3 , . . . , w7 ≤ 10. (1) PM10 density is clearly the main factor in the de- By employing the particle swarm optimization method cision making. in Matlab programme, the optimum average accuracy ratio (2) This result shows that topography plays a role in the based on weighted choice values, weighted score values, and haze pollution problem for this region of study.
Advances in Fuzzy Systems 11 Table 12: The accuracy ratio of the location identification by Algorithm 5 with weight information. Weight information Decision based w1 (%) w2 (%) w3 (%) w4 (%) w5 (%) Choice values 21.18 25.80 33.37 40.40 45.55 Average accuracy ratio Score values 26.56 42.15 48.96 50.49 51.81 Grey relational grades 26.13 37.43 45.99 49.84 51.04 Table 13: The best accuracy ratio. Decision based Accuracy ratio (%) Optimal weight Choice values 56.58 (20, 0, 0, 2, 4, 1, 1) Score values 57.13 (18, 1, 0, 2, 2, 3, 3) Grey relational grades 57.02 (23, 1, 0, 2, 2, 3, 2) Table 14: Parameters and optimum weights for the haze warning system. Label Parameters Weight Effects (for atmospheric parameters) P1 PM10 density 17 Positive P2 Air pressure 0 Positive P3 Relative humidity 0 Positive P4 Wind speed 2 Negative P5 Rainfall 3 Negative P6 Temperature 0 Negative P7 Airflow difficulty level 0 N/A Table 15: Parameters and optimum weights for the identification of the most hazardous location. Label Parameters Weight Effects (for atmospheric parameters) P1 PM10 density 18 Positive P2 Air pressure 1 Positive P3 Relative humidity 0 Positive P4 Wind speed 2 Negative P5 Rainfall 2 Negative P6 Temperature 3 Negative P7 Airflow difficulty level 3 N/A (3) Temperature, wind speed, and rainfall are factors in For further works, our suggestions are to add the fol- the model. Unfortunately, these atmospheric pa- lowing parameters: rameters are uncontrollable. Atmospheric parameters: PM2.5 density, SO2, ozone, (4) Air pressure and relative humidity have less or no and wind direction. impact for the prediction model. Topographic parameters: height above sea level of the This study analysis agrees with principle study in en- location, location of surrounded mountains, and height vironmental science research. It should be emphasized that of surrounded mountains. the only parameter that can be controlled is PM10 density. Others parameters: population. The activities that contribute to PM10 such as outdoor burn or car emissions should be disregarded. 5. Conclusions In this article, we propose a fuzzy soft model to benefit in the 4.3.3. Other Discussion. By the results from Sections 4.1 and haze pollution management in northern Thailand. The main 4.2, it should be pointed out that a simple warning system aims of this research are to provide a haze warning system and location identification based on the information of based on real-time atmospheric data and to identify the most PM10 density is reasonable enough. By adding the pa- hazardous location of the study area. The study area covers rameters, the efficiency of the model is improved very eight provinces in the northern Thailand, where the problem slightly. This emphasizes the fact that environmental severely occurs every year. The parameters of the fuzzy soft modeling is complicated. However, since the calculation of set include both atmospheric parameters and topographic our algorithm is not expensive, Algorithms 3 and 5 should parameter. The membership values of atmospheric pa- still be in use to improve the decision-making problem. rameters are calculated based on the real-time data. The
12 Advances in Fuzzy Systems efficiency of the model is tested with the real data from 1st assessment and their relationship to air-mass movement,” January 2016 to 31st May 2016. The results show that our Atmospheric Research, vol. 124, pp. 109–122, 2013. fuzzy models improve the prediction accuracy ratio com- [7] P. Pengchai, S. Chantara, K. Sopajaree, S. Wangkarn, pared to the prediction based on PM10 density only. The U. Tengcharoenkul, and M. Rayanakorn, “Seasonal variation, optimum results and optimum weights are chosen based on risk assessment and source estimation of PM10 and PM10- bound PAHs in the ambient air of Chiang Mai and Lamphun, particle swarm optimization. The meaning of optimum Thailand,” Environmental Monitoring and Assessment, weights also agrees with the principle study in environ- vol. 154, no. 1–4, pp. 197–218, 2009. mental science research. Another benefit of our model is that [8] D. Molodtsov, “Soft set theory-first results,” Computers & the topographic parameter, which is normally being dis- Mathematics with Applications, vol. 37, no. 4-5, pp. 19–31, regarded from many models, is included. Moreover, our 1999. model would offer an alternative prediction model for the [9] P. K. Maji, R. Biswas, and A. R. Roy, “Fuzzy soft sets,” The haze pollution problem in northern Thailand. Journal of Fuzzy Mathematics, vol. 9, no. 3, pp. 589–602, 2001. The fuzzy soft set approach in the application to haze [10] N. Cagman, S. Enginoglu, and F. Citak, “Fuzzy soft set theory pollution management furnishes very promising prospect and its applications,” Iranian Journal of Fuzzy System, vol. 8, and possibilities. We strongly believe that the efficiency of pp. 137–147, 2011. the model can be improved when appropriate parameters [11] B. Fisher, “Fuzzy environmental decision-making: applica- are added. The calculation formula for the membership tions to air pollution,” Atmospheric Environment, vol. 37, no. 14, pp. 1865–1877, 2003. values and the severity index can also be adjusted. The ef- [12] A. K. Gorai, K. Kanchan, A. Upadhyay, and P. Goyal, “Design ficient model will clearly improve the health safety and raise of fuzzy synthetic evaluation model for air quality assess- the life quality of the sufferers. ment,” Environment Systems and Decisions, vol. 34, no. 3, pp. 456–469, 2014. Data Availability [13] A. Khan, “Use of fuzzy set theory in environmental engi- neering applications: a review,” International Journal of En- The data used to support the findings of this study are gineering Research and Applications, vol. 7, no. 6, pp. 1–6, available from the corresponding author upon request. 2017. [14] H. Yang, Z. Zhu, C. Li, and R. Li, “A novel combined fore- Conflicts of Interest casting system for air pollutants concentration based on fuzzy theory and optimization of aggregation weight,” Applied Soft The author declares that there are no conflicts of interest. Computing, vol. 87, Article ID 105972, 2020. [15] S. L. Chen, “The application of comprehensive fuzzy judge- ment in the interpretation of water-flooded reservoirs,” The Acknowledgments Journal of Fuzzy Mathematics, vol. 9, no. 3, pp. 739–743, 2001. [16] S. J. Kalayathankal and G. S. Singh, “A fuzzy soft flood alarm The author would like to thank Department of Environ- model,” Mathematics and Computers in Simulation, vol. 80, mental Science, Faculty of Science, Chiang Mai University, Article ID 887893, 2010. Thailand, and Pollution Control Department, Ministry of [17] S. J. Kalayathankal, G. S. Singh, and P. B. Vinodkumar, Natural Resource and Environment, Thailand, for providing “MADM models using ordered ideal intuitionistic fuzzy sets,” the atmospheric data. This research was supported by the Advances in Fuzzy Mathematics, vol. 4, no. 2, pp. 101–106, Centre of Excellence in Mathematics, CHE, and Chiang Mai 2009. University. [18] P. C. Nayak, K. P. Sudheer, and K. S. Ramasastri, “Fuzzy computing based rainfall-runoff model for real time flood References forecasting,” Hydrological Processes, vol. 19, no. 4, pp. 955–968, 2005. [1] Pollution Control Department (PCD) Website, http://www. [19] E. Toth, A. Brath, and A. Montanari, “Comparison of short- pcd.go.th. term rainfall prediction models for real-time flood forecast- [2] Climate Change Data Centre of Chiang Mai University (CMU ing,” Journal of Hydrology, vol. 239, no. 1–4, pp. 132–147, CCDC) Website, http://www.cmuccdc.org. 2000. [3] Smoke Haze Integrated Research Unit (SHIRU) Website, [20] S. J. Kalayathankal, G. S. Singh, S. Joseph et al., “Ordered ideal http://www.shiru-cmu.org/. intuitionistic fuzzy model of flood alarm,” Iranian Journal of [4] S. Phoothiwut and S. Junyapoon, “Size distribution of at- Fuzzy Systems, vol. 9, no. 3, pp. 47–60, 2012. mospheric particulates and particulate-bound polycyclic ar- [21] J. Tan, J. Fu, G. Carmichael et al., “Why models perform omatic hydrocarbons and characteristics of PAHs during haze differently on particulate matter over East Asia? A multi- period in Lampang Province, Northern Thailand,” Air model intercomparison study for MICS-Asia III,” Atmo- Quality, Atmosphere & Health, vol. 6, no. 2, pp. 397–405, 2013. spheric Chemistry and Physics Discussions, 2019, in review. [5] S. Chantara, S. Sillapapiromsuk, and W. Wiriya, “Atmo- [22] R. Bhakta, P. S. Khillare, and D. S. Jyethi, “Atmospheric spheric pollutants in Chiang Mai (Thailand) over a five-year particulate matter variations and comparison of two fore- period (2005–2009), their possible sources and relation to air casting models for two Indian megacities,” Aerosol Science mass movement,” Atmospheric Environment, vol. 60, and Engineering, vol. 3, no. 2, pp. 54–62, 2019. pp. 88–98, 2012. [23] B. Pimpunchat and S. Junyapoon, “Modeling haze problems [6] W. Wiriya, T. Prapamontol, and S. Chantara, “PM10-bound in the north of Thailand using logistic regression,” Journal of polycyclic aromatic hydrocarbons in Chiang Mai (Thailand): Mathematical and Fundamental Sciences, vol. 46, no. 2, seasonal variations, source identification, health risk pp. 183–193, 2014.
Advances in Fuzzy Systems 13 [24] B. Mitmark and W. Jinsart, “A GIS model for PM10 exposure from biomass burning in the north of Thailand,” Applied Environmental Research, vol. 39, no. 2, pp. 77–87, 2017. [25] A. R. Roy and P. K. Maji, “A fuzzy soft set theoretic approach to decision making problems,” Journal of Computational and Applied Mathematics, vol. 203, no. 2, pp. 412–418, 2007. [26] Z. Kong, L. Wang, and Z. Wu, “Application of fuzzy soft set in decision making problems based on grey theory,” Journal of Computational and Applied Mathematics, vol. 236, no. 6, pp. 1521–1530, 2011. [27] J. Kennedy and R. Eberhart, “Particle swarm optimization,” Proceedings of the International Conference on Neural Net- works, vol. 4, 1995. [28] A. Meneses, M. Machado, and R. Schirru, “Particle swarm optimization applied to the nuclear reload problem of a pressurized water reactor,” Progress in Nuclear Energy, vol. 51, no. 3, pp. 319–326, 2009. [29] R. Samphutthanon, N. K. Tripathi, S. Ninsawat et al., “Spatio- temporal distribution and hotspots of hand, foot and mouth disease (HFMD) in northern Thailand,” International Journal of Environmental Research and Public Health, vol. 11, no. 1, pp. 312–336, 2013. [30] L. Wang, N. Zhang, Z. Liu et al., “The influence of climate factors, meteorological conditions, and boundary-layer structure on severe haze pollution in the beijing-tianjin-hebei region during January 2013,” Advances in Meteorology, vol. 2014, Article ID 685971, 14 pages, 2014. [31] S. Zhou, S. Peng, M. Wang et al., “The characteristics and contributing factors of air pollution in nanjing: a case study based on an unmanned aerial vehicle experiment and multiple datasets,” Atmosphere, vol. 9, no. 9, p. 343, 2018. [32] N. Pasukphun, “Environmental health burden of open burning in northern Thailand: a review,” PSRU Journal of Science and Technology, vol. 3, no. 3, pp. 11–28, 2018. [33] W. Mankan, “The causing factors of the smog phenomenon in Lampang basin,” Burapha Science Journal, vol. 22, no. 3, pp. 226–239, 2017. [34] L. Pardthaisong, P. Sin-ampol, C. Suwanprasit, and A. Charoenpanyanet, “Haze pollution in Chiang Mai, Thai- land: a road to resilience,” Procedia Engineering, vol. 212, pp. 85–92, 2018.
You can also read