A Concise Method to Predict the Mean Dynamic Pressure on a Plunge Pool Slab
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

entropy
Article
A Concise Method to Predict the Mean Dynamic Pressure on a
Plunge Pool Slab
Maolin Zhou, Xin Li, Jianmin Zhang * and Weilin Xu
State Key Laboratory of Hydraulics and Mountain River Engineering, Sichuan University, Chengdu 610065,
China; zhoumaolin@scu.edu.cn (M.Z.); bixizhen@foxmail.com (X.L.); xuwl@scu.edu.cn (W.X.)
* Correspondence: zhangjianmin@scu.edu.cn
Abstract: Hydrodynamic pressure exerted on a plunge pool slab by jet impingement is of high
interest in high dam projects. The present study experimentally investigated the characteristics of
pressure induced by a jet through a constant width flip bucket (CFB) and a slit flip bucket (SFB).
A pressurized plane pipe was employed in the flume experiments to control the inlet velocities
in the flip buckets. A concise method is proposed to predict the mean dynamic pressure field. Its
implementation is summarized as follows: First, the position of the pressure field is determined by the
trajectories of free jets, and to calculate its trajectories, an equation based on parabolic trajectory theory
is used; second, the maximum mean dynamic pressure is obtained through dimensional analysis,
and then the pressure field is established by applying the law of Gaussian distribution. Those steps
are integrated into a concise computing procedure by using some easy-to-obtain parameters. Some
key parameters, such as takeoff velocity coefficient, takeoff angle coefficient, and the parameter k2 ,
are also investigated in this paper. The formulas of these coefficients are obtained by fitting the
experimental data. Using the proposed method, the easy-to-obtain geometric parameters and initial
hydraulic conditions can be used to calculate the maximum mean dynamic pressure on the slab. A
comparison between experimental data and calculated results confirmed the practicability of this
model. These research results provide a reference for hydraulic applications.
Keywords: dimensional analysis; parabolic trajectory; flip bucket; dynamic pressure; jet trajectory;
plunge pool
Citation: Zhou, M.; Li, X.; Zhang, J.;
Xu, W. A Concise Method to Predict
the Mean Dynamic Pressure on a
Plunge Pool Slab. Entropy 2022, 24, 45.
https://doi.org/10.3390/e24010045 1. Introduction
Hydropower projects commonly utilize flip buckets to transfer stormwater from high
Academic Editor: Lamberto Rondoni
elevations to plunge pools, e.g., the Mossyrock Dam in Washington State, USA [1], and
Received: 16 December 2021 the Jinping-I arch Dam in Sichuan, China [2]. There are two common types of flip buckets:
Accepted: 24 December 2021 constant width flip bucket (CFB) and slit flip bucket (SFB). Recently, a new type of flip
Published: 27 December 2021 bucket structure with a leak slab at the bottom has been proposed by Deng [3]. The present
Publisher’s Note: MDPI stays neutral research focused primarily on CFB and SFB. Water released from a flip bucket outlet is
with regard to jurisdictional claims in directed downstream to produce a free jet [4]; however, an impingement jet is produced
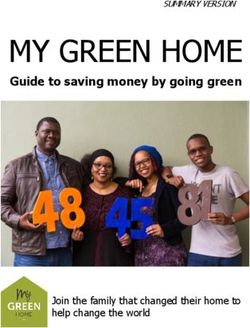
published maps and institutional affil- when a free jet plunges into a pool of water, as shown in Figure 1. Impingement jet impact
iations. on plunge pool slabs plays an important role in scouring a river bed due to its dynamic
pressure [5]. Therefore, a thorough understanding and accurate prediction of the dynamic
pressure on plunge pool slabs are essential in the design of high-elevation dams. The shapes
of free jets are determined by geometrical characteristics of the flip buckets. Impingement
Copyright: © 2021 by the authors. jets have different properties depending on the shape of free jets, and impingement jets
Licensee MDPI, Basel, Switzerland. exert a dynamic pressure on the slab of the plunge pool. Their relationships are significant
This article is an open access article for engineering design in high-elevation dam projects. However, relevant research works
distributed under the terms and
on their relationships are very rare to this day. It is expected that for predicting dynamic
conditions of the Creative Commons
pressure on plunge pool slabs, two particular aspects should be carefully considered:
Attribution (CC BY) license (https://
(1) location of the dynamic pressure field, and (2) maximum mean dynamic pressure and
creativecommons.org/licenses/by/
its related pressure distribution.
4.0/).
Entropy 2022, 24, 45. https://doi.org/10.3390/e24010045 https://www.mdpi.com/journal/entropy
Entropy 2022, 24, 45 2 of 15
Figure 1. Scheme of the overflow discharge spillway and plunge pool.
The location of the dynamic pressure is mainly determined by trajectories of free
jets [6]. A free jet falling in still air has been extensively studied, taking into account air
entrainment, trajectory, flow pattern, transverse velocity distribution, and energy dissipa-
tion [4,7–10]. Formulas derived from mass point dynamics were introduced to estimate jet
trajectories [7,11]. The takeoff angles and takeoff velocities of a jet are needed in computing
the jet trajectories. In general, prototype jet trajectories often deviate from the commonly
adopted trajectory parabola proposed by the US Bureau of Reclamation [11]. One of the
challenges of applying the parabolic trajectory is to obtain the takeoff angles of jets. Re-
searchers pointed out that lower and upper jet trajectory takeoff angles are frequently
different from the deflection angle of bucket slabs [12,13]. To redress the discrepancy
between the takeoff angle and geometric takeoff angle, some empirical equations were
presented to describe their relationship [14,15]. Wu and Xu [16] demonstrated that the
takeoff velocity has a much larger effect on the impact point than the takeoff angle. Thus,
another challenge is to determine the takeoff velocity at the takeoff point, which may vary
with the water depth and geometric takeoff angle.
In plunge pool slabs, stability is determined by the highest mean dynamic pressure
and its distribution, as the standard deviation of the distribution is small [5]. Water
cushions with effective water pressures and water cushions without effective water pres-
sures have been differentiated based on the pressures caused by the different situations in
dynamics [17,18]. An initial study of dynamic pressure on plunge pool slabs began in the
1960s, and a formula integrating the momentum conservation law was set forth by Cola [19]
to estimate the maximum mean dynamic pressure. The model consisted of four parameters:
Water velocity when it reaches the water cushion, water cushion thickness, jet height, and
an experimental coefficient. In terms of effective water cushions, the expression had proven
useful [18]. As discussed by Guo [20], the air content of jets is a factor in maximum mean
dynamic pressure and the distribution of pressure at the slab, and it was found that the
maximum mean dynamic pressure decreases and the pressure distribution region become
larger when air is entrained into jets. The typical pressure distribution was observed to obey
the Gaussian distribution law well [21–23]. Some formulas were proposed to calculated
mean or fluctuating dynamic pressure value and its distribution [24–29]. However, the
required parameters used to calculate the pressure in the above literature are related to the
cross-section of jets at the water cushion surface, including the shape of the cross-section,
jet width, and entry velocity. It is an inconvenience for engineers to apply formulas because
it is hard to obtain the aforementioned required parameters.
Entropy 2022, 24, 45 3 of 15
This paper presents a concise and convenient method for predicting the mean dynamic
pressure field and its location on the plunge pool slab. In the present method, it is possible
to evaluate the free jet trajectory in still air and a water cushion, the position of the jet’s
falling point on the slab, the maximum pressure value caused by the jet, and the pattern of
pressure distribution using parameters easily obtained from flip buckets. In addition to
that, it is also a systematically based method for writing programs and quickly performing
calculations. The method is unique as it correlates the dynamic pressure with the easy-to-
obtain parameters, such as flow rate Q, the width of the flip bucket b0 , the depth of the
water cushion hc , and the geometrical takeoff angle of the flip bucket θ. To support the
theoretical analysis, a physical model of an over-topping flow flip bucket and plunge pool
are employed, and detailed measurements on trajectories of free jets and mean dynamic
pressure on plunge pool slab were conducted.
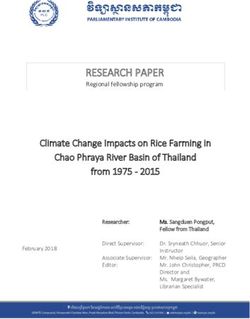
2. Experimental Setup
A lab experiment was conducted to test a free jet launched from a flip bucket that
hits the water cushion in a plunge pool. Figure 2 illustrates the experimental setups.
The physical model consists of an approach channel with dimensions of 0.4 m long ×
0.12 m wide × 0.25 m high, a flip bucket, a rectangular plunge pool with dimensions of
4.0 m long × 0.80 m wide × 0.65 m high, and a circulating reservoir. The approach channel
and the flip bucket were made of Plexiglas; the plunge pool was made of glass. Water was
supplied through the approach channel connected to a circulating water supply system. By
using a thin plate weir, the discharge of water was measured to the nearest 0.01 L/s, and
the flow ranged from 18.58 to 43.76 L/s. Two types of classic flip buckets were tested, a
constant width flip bucket (CFB) and a slit flip bucket (SFB). Both types of buckets were
connected to the approach channel by a waterways experiment station (WES) weir. As
shown in Figure 1, the slab of the WES weir is determined by Z = −0.0614X 1.85 , where X
and Z are corresponding values in the X–Y coordinate system. The bottom slab of all flip
buckets is retracted 0.05 m from the exits. The geometric takeoff angle (θ0 ) for both types of
flip buckets is −35°. The exit width of the SFB shrinks evenly from 0.12 to 0.06 m within a
length of 0.13 m, while the exit width of the CFB remains 0.12 m. The difference in height
between the approach channel bottom and the plunge pool slab is 1.30 m.
The depth of the water cushion (hc ) was settled to 0.40 m by operating an adjustable
baffle at the outlet of the plunge pool, which is considered an effective water cushion
according to Puertas and Dolz’s research [18]. Figure 2b shows forty pressure sensors
placed along the central line of the plunge pool slab to measure the time-average pressure
(∆P). The pressure sensor used in the experiment is the CY200 pressure sensor made by
Chengdu Test Co., Ltd. This pressure signal is picked up and processed by a piezoresistive
silicon crystal as the sensitive part. It then performs filtering, amplifies correction functions,
and directly outputs the displayed and stored data. The sensor is connected to the hub via
the connection line, and the hub is connected to the PC terminal via the network cable. It
is possible to connect up to 20 CY200s at once to a hub. Samples are taken at 100 Hz, the
total duration of sampling is 120 s, and the accuracy exceeds 0.01 kpa. The plotted data are
the average of the measured instantaneous data. The height of the free jet at the takeoff
cross-section was measured with a steel ruler (h0 ).
A digital camera fixed on one side of the experimental system was used to take pictures
of the free jet. Instantaneous images were used to obtain trajectory data. This is a non-
intrusive measurement technique that has been proven useful by other researchers [30,31].
For the first step, a calibration board with 11 horizontal and 10 vertical uniform black and
white square meshes was used to correct distortions. Next, all images of jets were greyed
and binarized with thresholds measured at the air–water interface, after which an edge for
representing the trajectory was determined. Dimension is converted from one image unit
(pixel) to another by scaling the height of the flip buckets in the physical model.
Entropy 2022, 24, 45 4 of 15
Figure 2. (a) The geometrical parameters of SFB and CFB. (b) Experimental model. (c) Flow type of
the jet in still air.
Entropy 2022, 24, 45 5 of 15
Table 1 summarizes the range of the experimental parameters. The takeoff bulk
velocity at the takeoff cross-section U0 is defined by Q/(h0 × b0 ), where Q = flow rate and
h0 × b0 = area of the takeoff cross-section. The Froude number varies from 1.14 to 2.70
in the approach channel of the present experimental model, while the Reynolds number
varies from 172,575 to 407,358. Instead of focusing on a specific high dam project, the article
abstracts problems of overflow flood discharge and conducts laboratory experiments.
When testing the hydraulics of a high dam project, the physical prototype must be scaled
to the model size properly to obtain accurate results. The present study will focus on the
distribution of mean dynamic pressure on the plunge pool slab, the typical jet trajectory of
free jet flow, which satisfies the Froude criterion. According to the Froude similitude law,
the values can be extrapolated from laboratory results for use in real engineering. However,
scale effects may still will appear in a physical model because the air–water properties in
supercritical flows cannot be discounted in terms of surface tension and viscosity effects in
high-speed air–water flows. These effects can be minimized or accounted for with careful
selection of the model size and interpretation of the results. In order to minimize this
effect in vertical plunging jets, the head of the flow should be larger than 0.045 m [32,33].
According to Pfister and Hager [9], the amount of stable drop size is constant for both the
primary and secondary jet disintegration. The water drops are supposed to be stable if
W < 10. The effect is mainly confined to the part of air concentrations over 90%, which is
insignificant to define a jet surface. The maximum Weber number W = (ρU 2 hin )/σ in the
present experiment was below 11, where σ = water surface tension. In the present study,
these limitations were respected. Hence, the trajectories of free jets are believed to not be
affected by the width in the transversal direction (12 cm).
According to Figure 2c, the width of the free jet released by CFB remains constant
while the width of the free jet released by SFB rapidly shrinks in the Y direction (transverse),
and then remains small until the free jet jumps into the pool. Thus, a two-dimensional
treatment of the flow motion is reasonable. Particular attention is paid to the distribution
of pressure on the plunge pool floor in the X direction (streamwise direction) because it
more directly determines the cost of the plunge pool floor.
Table 1. Summary of experiments.
Test Number Discharge Q (L/S) Inlet Velocity U (m/s) Type of the Flip Bucket
1 18.58 0.86 CFB
2 23.22 1.08 CFB
3 27.84 1.29 CFB
4 37.13 1.72 CFB
5 43.76 2.03 CFB
6 18.58 0.86 SFB
7 23.22 1.08 SFB
8 27.84 1.29 SFB
9 43.76 1.98 SFB
3. Calculating the Trajectory of the Free Jet
3.1. General Equation
Various studies [6,7] indicated that both the lower and upper free jet trajectories
can be approximated with the parabolic equation, based on the mass point dynamics.
Takeoff points were defined as the origin of the Xr − Zr coordinate system (Figure 2).
The Xr − Zr coordinate system is transformed from the X − Z coordinate system using
Equations (1) and (2):
Zr + Z0l + h0 at upper edge
Z= (1)
Zr + Z0l at lower edge
X = Xr + LWES (2)
Entropy 2022, 24, 45 6 of 15
where Z0l represents the coordinate value of lower takeoff points in the Z − axis of the
X − Z coordinate system; h0 represents the height of the free jet at the takeoff cross-section;
LWSE represents the horizontal length of the WES weir.
The upper edge or lower edge of free jets can be calculated by the effective takeoff
angle (θ0 ) and takeoff velocity (U0 ). The equation of motion in a plane is:
gXr2
Zr = Xr tan θ0 − (3)
2U02 cos2 θ0
where Xr and Zr are the coordinates of the trajectory of the edge of free jets in the Xr − Zr
coordinate system; g is the acceleration due to gravity; if a jet issues upward, θ0 is positive,
and otherwise negative. The major obstacle of applying Equation (3) is to obtain the
effective takeoff angle (θ0 ) and the takeoff velocity (U0 ). It is necessary to replace these two
parameters with some easy-to-obtain parameters. In the present study, some coefficients
are introduced to calculate these parameters. The coefficients introduced in this paper are
all obtained by fitting the experimental results.
3.2. Mean Velocity Coefficients
To make the application of the trajectory in the case of dam over-topping flow as
convenient as possible, the trajectory is expressed as a function of the inlet velocity (U).
The velocity of jet flow from a flip bucket can be easily related to the reservoir head. The
relationship of the inlet velocity U at the approach channel and the mean takeoff velocity
(U0 ) at the takeoff cross-section is:
U 0 = αU (4)
where α is the mean velocity coefficient. Figure 3 shows that for a certain
p flip bucket, and
α gradually decreases with the increase in Froude number (Fr = U/ ghin ). The mean
velocity coefficients αCFB and αSFB are given by functions of Fr as:
αCFB = 1.4Fr −0.7 (5)
αSFB = 1.7Fr −0.6 (6)
Figure 3. Mean velocity coefficient at the free jets takeoff cross-section (CFB and SFB).
3.3. Takeoff Velocity Coefficients
Note that the takeoff velocity at the upper (or lower) takeoff point may differ from the
takeoff bulk velocity (U0 ). The relationship of the U0u (or U0l ) and (U0 ) can be expressed as:
U0u = β u U0 (7)Entropy 2022, 24, 45 7 of 15
U0l = β l U0 (8)
where β u and β l are the upper and lower takeoff velocity coefficients, respectively. The
measured trajectories were used as benchmark data, and the values of takeoff velocity
coefficients were adjusted accordingly. For CFB, these takeoff velocities are larger than the
mean takeoff velocities (U0 ) and U0u gradually increases with the increase in Fr, while U0l
decreases with the increase in Fr, as shown in Figure 4a. For SFB, these takeoff velocities
are identical to the mean takeoff velocities (U0 ) since the height of the free jet at the takeoff
cross-section (h0 ) is small. The values of takeoff velocity coefficients can be given as follows.
For CFB:
β u = 0.6Fr + 1.10 (9)
β l = −0.23Fr + 1.32 (10)
For SFB:
βu = βl = 1 (11)
3.4. Takeoff Angle Coefficients
Various studies indicate that using the geometric takeoff angle (θ) for trajectory com-
putation may result in unacceptable errors [9]. Consequently, the pressure field position
on the plunge pool slab is sometimes closer than estimated with θ. The relationship of the
effective takeoff angle at the upper (θ0u ) and the lower (θ0l ) takeoff points and the geometric
takeoff angle (θ) can be expressed as:
θ0u = δu θ; θ0l = δl θ; (12)
where δu , δl represent the takeoff angle coefficient at the upper and the lower takeoff points,
respectively. The variables δu and δl were used to fit the experimental trajectory data to
Equation (3). For CFB, the virtual angles ( θ0u and θ0l ) at both the upper and the lower
takeoff points are identical to the geometrical angles. For SFB, these virtual angles at the
upper takeoff points (θ0u ) are mostly significantly larger than the geometrical angles (θ),
while the virtual angles at the lower takeoff points (θ0l ) are smaller than the geometrical
angles (θ), as shown in Figure 4b. Note again that the geometrical angle (θ) in the present
research is fixed at −35°. For all data sets, the takeoff angle coefficient is as follows.
For CFB:
δu = δl = 1 (13)
For SFB:
δu = −0.1Fr + 0.84 (14)
δl = 0.2Fr + 0.04 (15)
Figure 5 shows a comparison of data sets predicted by using Equation (3). This result
indicates that free jets issued from CFB and SFB can be well estimated by Equation (3).Entropy 2022, 24, 45 8 of 15
Figure 4. (a) Velocity coefficient at upper and lower takeoff points (CFB). (b) Takeoff angle coefficient
at upper and lower takeoff points.
Figure 5. Comparison of the measured data from EXP. with the trajectory computed by using
Equation (3): (a) CFB, (b) SFB.Entropy 2022, 24, 45 9 of 15
4. Predicting the Dynamic Pressure
4.1. Location of the Stagnation Point
The central point of the impact area of the dynamic pressure due to the inclined
submerged jet is the stagnation point where the maximum mean dynamic pressure on the
slab occurred. It is assumed that the position of the stagnation point can be obtained by
calculating the trajectory of the mass point at the center of the takeoff cross-section. The
trajectory is called the central line in the present paper. The central line can be divided
into two parts: a free jet section and an impingement jet section. In the free jet section, the
central line can be calculated by Equation (3). The coordinate value needs to be adjusted
using Equations (16) and (17):
Z = Zr + Z0l + h0 /2 (16)
X = Xr + LWSE (17)
The takeoff velocity coefficient (β c ) and the takeoff angle coefficient (δc ) of the central
line can be obtained as:
β 0c = ( β 0u + β 0l )/2 (18)
δ0c = (δ0u + δ0l )/2 (19)
In the impingement jet section, the central line can be approximated to a straight line
tangential to the curvy central line upon entering the water cushion [34]. Figure 5 shows the
comparison of the jet profile of the experiment and the one predicted by the aforementioned
methods. The digital camera fixed on the side of the experimental system was used to
take pictures of the free jet, and the profile data of the free jet was obtained through digital
graphics processing. The predicted profiles of free jets and impingement jets are plotted
along with central lines. The data calculated by the aforementioned methods agree well
with the experimental data. Meanwhile, the end point of the central line is the stagnation
point, denoted as Xs .
4.2. Maximum Mean Dynamic Pressure
The mean dynamic pressure, denoted as ∆P, is defined as the time-average pressure
(the pressure must be divided by the water-specific weight, in order to obtain a height)
on the plunge pool slab minus the average water depth in the plunge pool. ∆P is caused
by the remaining momentum of the impingement jet. According to the theory of jets, the
velocity attenuation is influenced by the length of the potential core, which is significantly
determined by the characteristic width of the impingement jet (ϕ) [35]. In some literature,
the characteristic width refers to the width or diameter of impingement jets [18,20,29].
Therefore, the accurate estimation of characteristic width (ϕ) of impingement jets is an
essential step to calculate the value of dynamic pressure. As shown in Figure 5, there
are huge differences in the initial cross-section shape of impingement jets resulting from
different flip buckets. The initial cross-section shape is wide in the lateral-wise direction
and relatively narrow in the streamwise direction when the free jet is discharged from the
CFB. Hence the characteristic width (ϕ) is considered dependent on the initial height (h0 )
of free jets. The initial cross-section shape is much narrower in the lateral-wise direction
and prolonged in the streamwise direction when the free jet issues from the SFB, and the
characteristic width (ϕ) is determined by the initial width (b0 ) of free jets. Thus, for CFB,
ϕ = h0 , and for SFB, ϕ = b0 , as shown Table 2.Entropy 2022, 24, 45 10 of 15
Table 2. The value of the characteristic width ϕ.
Type Q (L/S) h0 (m) B0 (m) ϕ (m)
CFB 18.58 0.090 0.120 0.090
CFB 23.22 0.108 0.120 0.108
CFB 27.84 0.124 0.120 0.124
CFB 37.13 0.152 0.120 0.152
CFB 43.76 0.167 0.120 0.167
SFB 18.58 0.090 0.060 0.060
SFB 23.22 0.108 0.060 0.060
SFB 27.84 0.124 0.060 0.060
SFB 42.81 0.167 0.060 0.060
The basic assumption is that maximum dynamic pressure is related to the initial
velocity of the impingement jet (U02 ), the characteristic width (ϕ), the depth of the water
cushion (hc ), and water density (ρ), described by:
∆Pmax = f U00 , ϕ, hc , ρ
(20)
The following formula can be obtained by dimensional analysis:
ϕ
∆Pmax = f U002 ρ (21)
hc
where U002 is related to inlet velocity (U) and the height difference (h f ) between the approach
channel’s bottom and the water cushion, as given below:
U002 = U 2 + 2gh f (22)
Equation (21) can be rewritten as:
∆Pmax
ϕ
= f (23)
U 2 + 2gh f ρ hc
Figure 6 shows the relationship between ∆Pmax (U 2 + 2gh f )ρ and
ϕ
hc . Thus, we obtain:
ϕ 2
∆Pmax = 0.41ρ U + 2gh f (24)
hc
Figure 6. The relationship between ∆Pmax (U 2 + 2gh f )ρ and
ϕ
hc .
4.3. Distribution of the Mean Dynamic Pressure
Ervine et al. [25] showed how the mean dynamic pressure coefficient varies radi-
ally around the impingement jet. The distribution of the pressure coefficients can beEntropy 2022, 24, 45 11 of 15
thought of as the distribution of the pressure. The data revealed a general expression of
the distribution:
∆P( X ) X − Xs 2
= e −k 2 ( hc ) (25)
∆Pmax
where Xs is the coordinate value of the stagnation point in the X − Z coordinate system,
the horizontal distance to the stagnation point is X − Xs , and the water cushion depth is hc .
A non-dimensional distribution of the mean dynamic pressure is shown in Figure 7 in the
streamwise direction on the plunge pool slab. For round jets, the parameter k2 varied from
30 for shallow pools to 50 for deep pools [25]. The parameter k2 varied for the rectangular
jet case [36]. As for our experiment cases, CFB had a parameter of k2 = 12, while SFB had
a parameter of k2 = 6. The onset of the jet breakup in still air was found to occur at a
distance of approximately 100 times the diameter of the nozzle [37]. In the present study,
h f ⁄ϕ = 5.39−15 shows that the jet flow does not break up in still air. It is important to note
that this formula can only be used to predict the dynamic pressure field on the floor if there
is an effective water cushion in the plunge pool.
Figure 7. Distributions of non-dimensional mean dynamic pressure on the plunge pool slab.
5. Discussion
In Table 3, the method used to predict the mean dynamic pressure of a slab is presented.
The required parameters include U, Fr, h0 , b0 , θ, hc , h f , β u , β l , δl , δu , and k2 . The parameters
of U, Fr, h0 , b0 , θ, hc , and h f are easily obtained in actual engineering practice, while
the parameters of α, β u , β l , δl , δu , and k2 for CFB and SFB have been acquired by fitting
experimental data. As illustrated in Figure 8, the predicted mean dynamic pressure field
was compared with the corresponding experimental results. The experimental data were
measured by pressure sensors that were placed on the central line of the plunge pool slab.In
the CFB case, since the jet flow has a more concentrated cross-section, pressure distribution
along the streamwise direction is more concentrated and its distribution is more Gaussian.
There is little pressure variation on the slab because of the stable width of the jet flow. In
the SFB case, the jet flow diffuses as the “——” type along the streamwise direction, so
the range of pressure distribution is wider. Since the jet flow’s width fluctuates as more
air enters the free jets [38], there is a large variation in pressure on the slab, so there is
less agreement with predicted values and the pressure is more widely distributed in the X
direction.Entropy 2022, 24, 45 12 of 15
Figure 8. The comparison of the predicted mean dynamic pressure field with the corresponding
experimental results: (a) CFB; (b) SFB.Entropy 2022, 24, 45 13 of 15
Table 3. The steps used to predict the mean dynamic pressure on the plunge pool slab.
Requisite Steps (Rs.)
Step Goal and Approach
and Parameters (Rp.)
Goal: obtain the takeoff velocity (U0 ) at takeoff
Rs.: None
1 cross-section;
Rp.: U, Fr, α
Approaches: Equations (4)–(6).
Goal: obtain takeoff velocities at upper and lower
Rs.: None
2 takeoff points U0u and U0l ;
Rp.: U0 , β u , β l
Approaches: Equations (7) and (8).
Goal: obtain effective takeoff angle at lower takeoff
Rs.: None
3 points (θ0u and θ0l );
Rp.: θ, δu , δl
Approach: Equation (12).
Goal: obtain the location of the stagnation point (Xs );
Approaches: calculate the central line by Equations Rs.: step 1, 2, and 3
4
(3), (16) and (17), and the end point of central line Rp.: θ, δu , δl
is the stagnation point.
Goal: calculate the maximum mean dynamic
Rs.: None
5 pressure ∆Pmax ;
Rp.: h0 , b0 , U, hc , k2
Approach: Equation (24).
Goal: obtain the distribution of the dynamic
Rs.: step 4 and 5
6 pressure ∆P( X );
Rp.: Xs , ∆Pmax , hc , k2
Approach: Equation (25).
6. Conclusions
The prediction process of dynamic pressure on a plunge pool is of interest to the
water supply and transfer systems. In the present study, the mean dynamic pressure was
measured, and the effects of the inlet velocity and types of flip buckets were investigated
using a physical hydraulic model. This study proposed a concise method using easy-to-
obtain parameters to predict the mean dynamic pressure field on the plunge pool slab. In
order to reach the goal, the convenient methods for predicting trajectories of free jets and
the maximum mean dynamic pressure and related pressure distribution were presented.
The following conclusions were developed:
1. The computation of the trajectory of a free jet should utilize both takeoff velocities
(U0u and U0l ) and effective takeoff angles (θ0u and θ0l ) at the upper and the lower takeoff
points (Equation (3)). The takeoff velocities can be estimated with reasonable accuracy
using inlet velocity (U), the Froude number (Fr), and takeoff coefficients (β). The takeoff
angles can be assessed by the geometrical takeoff angle (θ) and takeoff angle coefficients.
Those coefficients for CFB and SFB were investigated in the present research.
2. The location of the stagnation point can be approximated to be the end point of
the central line, which is the trajectory of the mass point at the center of the takeoff cross-
section. An equation to calculate the maximum mean dynamic pressure was derived from
dimensional analysis. The equation offered by Ervine [25] was used to predict the pressure
distribution in the streamwise direction. The values of k2 for CFB and SFB were 12 and 6,
respectively.
Author Contributions: Conceptualization, J.Z. and M.Z.; methodology, M.Z.; validation, X.L.; formal
analysis, M.Z.; writing—original draft preparation, M.Z.; writing—review and editing, X.L.; visu-
alization, M.Z.; supervision, J.Z.; project administration, W.X.; funding acquisition, J.Z. All authors
have read and agreed to the published version of the manuscript.
Funding: This study was funded by The National Science Fund for Distinguished Young Scholars
(Grant No. 51625901).
Institutional Review Board Statement: Not applicable.Entropy 2022, 24, 45 14 of 15
Informed Consent Statement: Not applicable.
Data Availability Statement: Not applicable.
Conflicts of Interest: The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
Q Flow rate
U0 Takeoff bulk velocity
U Inlet velocity
U0 Takeoff velocity
U0u Takeoff velocity at the upper takeoff point
U0l Takeoff velocity at the lower takeoff point
Fr Froude number
Xs Position of the stagnation point
h0 Height of the free jet at the takeoff cross-section
b0 Width of the flip bucket
hc Depth of water cushion
hf Height difference between approach channel bottom and water cushion
ϕ Characteristic width of free jets
θ Geometrical takeoff angle of the flip bucket
θ0 Effective takeoff angle
θ0u Effective takeoff angle at the upper takeoff point
θ0l Effective takeoff angle at the lower takeoff
α Mean velocity coefficient
βu Upper takeoff velocity coefficients
βl Lower takeoff velocity coefficients
θu takeoff angle coefficient at the upper takeoff point
∆P Mean dynamic pressure
∆Pmax Maximum mean dynamic pressure
References
1. Robertson, R.A.; Ball, J.W. Model Study of Power Intake Gate of Mossyrock Dam. J. Hydraul. Div. 1971, 97, 889–906. [CrossRef]
2. yong Wu, S.; Cao, W.; Zheng, J. Analysis of working behavior of Jinping-I Arch Dam during initial impoundment. Water Sci. Eng.
2016, 9, 240–248. [CrossRef]
3. Deng, J.; Yang, Z.L.; Tian, Z.; Zhang, F.X.; Wei, W.R.; You, X.; Xu, W.L. A new type of leak-floor flip bucket. Sci. China Technol. Sci.
2016, 59, 565–572. [CrossRef]
4. Teng, P.; Yang, J. Modeling and Prototype Testing of Flows over Flip-Bucket Aerators. J. Hydraul. Eng. 2018, 144, 04018069.
[CrossRef]
5. Melo, J.F.; Pinheiro, A.N.; Ramos, C.M. Forces on Plunge Pool Slabs: Influence of Joints Location and Width. J. Hydraul. Eng.
2006, 132, 49–60. [CrossRef]
6. Wahl, T.L.; Frizell, K.H.; Cohen, E.A. Computing the Trajectory of Free Jets. J. Hydraul. Eng. 2008, 134, 256–260. [CrossRef]
7. Juon, R.; Hager, W.H. Flip Bucket without and with Deflectors. J. Hydraul. Eng. 2000, 126. [CrossRef]
8. Toombes, L.; Chanson, H. Free-surface aeration and momentum exchange at a bottom outlet. J. Hydraul. Res. 2007, 45, 100–110.
[CrossRef]
9. Pfister, M.; Hager, W.H.; Boes, R.M. Trajectories and air flow features of ski jump-generated jets. J. Hydraul. Res. 2014, 52, 336–346.
[CrossRef]
10. Deng, J.; Wei, W.; Tian, Z.; Zhang, F.; Yang, Z. Analysis of Pressure Differences and Water Transverse Movement in a Partial-Flip
Bucket. J. Hydraul. Eng. 2020, 146, 04020063. [CrossRef]
11. US Department of the Interior, Bureau of Reclamation. Design of Small Dams; United States Government Printing Office:
Washington, DC, USA, 1987.
12. Zhang, Y.; Wu, W. Experimental researches on the flow profile and the nappe trajectory distance for slit-type bucket. Shuili
Xuebao 1989, 20, 14–21. (In Chinese)
13. Zhu, Y. Study on the Hydraulic Characteristics for Tongue-Shaped Flip Bucket. Ph.D. Thesis, Sichuan University, Chengdu,
China, 2004. (In Chinese)
14. Heller, V.; Hager, W.H.; Minor, H.E. Ski Jump Hydraulics. J. Hydraul. Eng. 2005, 131, 347–355. [CrossRef]
15. Wu, J.; Ruan, S. Cavity length below chute aerators. Sci. China Ser. E Technol. Sci. 2008, 51, 170–178. [CrossRef]
16. Wu, J.H.; Xu, Z.; Yao, L.; Ma, F. Ski-jump trajectory based on take-off velocity. J. Hydrodyn. 2016, 28, 166–169. [CrossRef]Entropy 2022, 24, 45 15 of 15
17. Cui, G.T.; Lin, J.Y.; Liang, X.R. Research on the force and influence of the overflow water tongue of the arch dam on the river bed.
Shuili Xuebao 1985, 8, 58–63. (In Chinese)
18. Puertas, J.; Dolz, J. Plunge Pool Pressures Due to a Falling Rectangular Jet. J. Hydraul. Eng. 2005, 131, 404–407. [CrossRef]
19. Cola, R. Energy dissipation of a high-velocity vertical jet entering a basin. In Proceedings of the 11th IAHR Congress, Leningrad,
Russia, 1965; Volume 1.
20. Guo, Y. Numerical Simulation of the Spreading of Aerated and Nonaerated Turbulent Water Jet in a Tank with Finite Water
Depth. J. Hydraul. Eng. 2014, 140, 04014034. [CrossRef]
21. Lin, J.; Lian, J. Calculation of the point area wall fluctuating pressure amplitude by two-dimensional jets. In Proceedings of the
Internernational Symposium on Hydraulics for High Dams, Beijing, China, 15–18 November 1988; pp. 375–382.
22. Manso, P.A.; Bollaert, E.F.R.; Schleiss, A.J. Impact pressures of turbulent high-velocity jets plunging in pools with flat bottom.
Exp. Fluids 2007, 42, 49–60. [CrossRef]
23. Manso, P.F.; Bollaert, E.F.; Schleiss, A.J. Evaluation of high-velocity pluning jet-issuing characteristics as a basis for plunge pool
analysis. J. Hydraul. Res. 2008, 46, 147–157. [CrossRef]
24. Tu, C.V.; Wood, D.H. Wall pressure and shear stress measurements beneath an impinging jet. Exp. Therm. Fluid Sci. 1996,
13, 364–373. [CrossRef]
25. Ervine, D.A.; Falvey, H.T.; Withers, W. Pressure fluctuations on plunge pool floors. J. Hydraul. Res. 1997, 35, 257–279. [CrossRef]
26. Bollaert, E.; Schleiss, A. Scour of rock due to the impact of plunging high velocity jets Part I: A state-of-the-art review. J. Hydraul.
Res. 2003, 41, 451–464. [CrossRef]
27. Borghei, S.M.; Zarnani, P. Jet impact geometry and plunge pool dimensions effects on dynamic pressures at pool sidewalls. Can.
J. Civ. Eng. 2008, 35, 408–417. [CrossRef]
28. Wang, Y.; Hu, Y.; Gu, J.; Peng, Y.; Xue, Y. Impact pressure distribution of inverted arch plunge pool for large discharge. Water Sci.
Technol. Water Supply 2020, 20. [CrossRef]
29. Wei, W.; Xu, W.; Deng, J.; Liu, B. Experimental Study of Impact Pressures on Deep Plunge Pool Floors Generated by Submerged
Inclined Jets with Controlled Aeration. J. Hydraul. Eng. 2020, 146, 04020021. [CrossRef]
30. Smith, S.H.; Mungal, M.G. Mixing, structure and scaling of the jet in crossflow. J. Fluid Mech. 1998, 357, 83–122. [CrossRef]
31. Lai, H.; Naughton, J.W.; Lindberg, W.R. An Experimental Investigation of Starting Impinging Jets. J. Fluids Eng. 2003, 125, 275–282.
[CrossRef]
32. Chanson, H. Turbulent air–water flows in hydraulic structures: Dynamic similarity and scale effects. Environ. Fluid Mech. 2009,
9, 125–142. [CrossRef]
33. Heller, V. Scale effects in physical hydraulic engineering models. J. Hydraul. Res. 2011, 49, 293–306. [CrossRef]
34. Li, N.; Deng, J.; Guo, W.; Li, L. Jet geometry effects on the velocity decay of an oblique submerged jet in a plunge pool. Deep. Rock
Mech. Res. Eng. 2018, 571–584. [CrossRef]
35. Li, X.; Zhou, M.; Zhang, J.; Xu, W. Numerical study of the velocity decay of offset jet in a narrow and deep pool. Water 2018, 11,
59. [CrossRef]
36. Castillo, L.G.; Carrillo, J.M.; Blázquez, A. Plunge pool dynamic pressures: A temporal analysis in the nappe flow case. J. Hydraul.
Res. 2015, 53, 101–118. [CrossRef]
37. Ma, Y.; David, Z.; Rajarathnam, N.; Camina, G. Experimental Study of the Breakup of a Free-Falling Turbulent Water Jet in Air,
2016. J. Hydraul. Eng. 2016, 142, 06016014. [CrossRef]
38. Ma, F.; Zhang, X.; Wu, J. Trajectories and air flow features of ski jump generated jets, 2016. J. Hydraul. Res. 2016, 54, 245–247.
[CrossRef]You can also read