Towards a model for structured mass movements: the OpenLISEM hazard model 2.0a - GMD
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Geosci. Model Dev., 14, 1841–1864, 2021
https://doi.org/10.5194/gmd-14-1841-2021
© Author(s) 2021. This work is distributed under
the Creative Commons Attribution 4.0 License.
Towards a model for structured mass movements:
the OpenLISEM hazard model 2.0a
Bastian van den Bout1 , Theo van Asch2 , Wei Hu2 , Chenxiao X. Tang3 , Olga Mavrouli1 , Victor G. Jetten1 , and
Cees J. van Westen1
1 Faculty of Geo-Information Science and Earth Observation, University of Twente, Enschede, the Netherlands
2 State Key Laboratory of Geohazard Prevention and Geo-Environment Protection, Chengdu University of Technology,
Chengdu, China
3 Institute of Mountain Hazards and Environment, Chinese Academy of Sciences, Chengdu, China
Correspondence: Bastian van den Bout (b.vandenbout@utwente.nl)
Received: 9 April 2020 – Discussion started: 25 June 2020
Revised: 27 November 2020 – Accepted: 15 December 2020 – Published: 6 April 2021
Abstract. Mass movements such as debris flows and land- 1 Introduction
slides differ in behaviour due to their material properties
and internal forces. Models employ generalized multi-phase
flow equations to adaptively describe these complex flow The Earth’s rock cycle involves sudden release and gravity-
types. Such models commonly assume unstructured and driven transport of sloping materials. These mass movements
fragmented flow, where internal cohesive strength is insignif- have a significant global impact in financial damage and ca-
icant. In this work, existing work on two-phase mass move- sualties (Nadim et al., 2006; Kjekstad and Highland, 2009).
ment equations are extended to include a full stress–strain Understanding the physical principles at work at their initia-
relationship that allows for runout of (semi-)structured fluid– tion and runout phase allows for better mitigation and adapta-
solid masses. The work provides both the three-dimensional tion to the hazard they induce (Corominas et al., 2014). Many
equations and depth-averaged simplifications. The equations varieties of gravitationally driven mass movements have been
are implemented in a hybrid material point method (MPM), categorized according to their material physical parameters
which allows for efficient simulation of stress–strain relation- and type of movement. Examples are slides, flows and falls,
ships on discrete smooth particles. Using this framework, the consisting of soil, rocks or debris (Varnes, 1987). Major fac-
developed model is compared to several flume experiments tors in determining the dynamics of mass movement runout
of clay blocks impacting fixed obstacles. Here, both final are the composition of the moving material and the internal
deposit patterns and fractures compare well to simulations. and external forces during initiation and runout.
Additionally, numerical tests are performed to showcase the Within the cluster of existing mass movement processes,
range of dynamical behaviour produced by the model. Im- a distinction can be made based on the cohesive of the mass
portant processes such as fracturing, fragmentation and fluid during movement. Post-release, a sloping mass might be un-
release are captured by the model. While this provides an im- structured, such as mud flows, where grain–grain cohesive
portant step towards complete mass movement models, sev- strength is absent. Alternatively, the mass can be fragmen-
eral new opportunities arise, such as application to fragment- tative, such as strongly deforming landslides or fragment-
ing mass movements and block slides. ing of rock avalanches upon particle impact. Finally, there
are coherent or structured mass movements, such as can be
the case for block slides where internal cohesive strength
can resist deformation for some period (Varnes, 1987). The
general importance of the initially structured nature of mass
movement material is observed for a variety of reasons. First,
block slides are an important subset of mass movement types
Published by Copernicus Publications on behalf of the European Geosciences Union.
1842 B. van den Bout et al.: Towards a model for structured mass movements (Hayir, 2003; Beutner and Gerbi, 2005; Reiche, 1937; Tang et al., 2017; Pudasaini and Mergili, 2019). However, this ap- et al., 2009). This type of mass movement features some co- proach lacks the process of fragmentation and internal fail- hesive structure to the dynamic material in the movement ure. phase. Secondly, during movement, the spatial gradients in For structured mass movements, limited approaches are local acceleration induce strain and stress that results in frac- available. These movements feature some discrete inter- turing. This process, often called fragmentation in relation to particle connectivity that allows the moving material to main- structured mass movements, can be of crucial importance for tain a elasto-plastic structure. Examples here are block slides, mass movement dynamics (Davies and McSaveney, 2009; rockslides and some landslides (Aaron and Hungr, 2016). Delaney and Evans, 2014; Dufresne et al., 2018; Coromi- These materials can be described by a Mohr–Coulomb mate- nas et al. 2019). The lubricating effect from basal fragmenta- rial with cohesive strength (Spencer, 2012). Aaron and Hungr tion can enhance velocities and runout distance significantly developed a model for simulation of initially coherent rock (Davies et al., 2006; Tang et al., 2009). Otherwise, fragmen- avalanches (Aaron and Hungr, 2016) as part of DAN3D Flex. tation generally influences the rheology of the movement by Within their approach, a rigid-block momentum analysis is altering grain–grain interactions (Zhou et al., 2005). The im- used to simulate initial movement of the block. After a spec- portance of structured material dynamics is further indicated ified time, the block is assumed to fragment, and a granular by engineering studies on rock behaviour and fracture mod- flow model using a Voellmy-type rheology is used for fur- els (Kaklauskas and Ghaboussi, 2001; Ngekpe et al., 2016; ther runout. Their approach thus lacks a physical basis for Dhanmeher, 2017). the fragmenting behaviour. Additionally, by dissecting the Dynamics of geophysical flows are complex and depend runout process in two stages (discrete block and granular on a variety of forces due to their multi-phase interactions flow), benefits of holistic two-phase generalized runout mod- (Hutter et al., 1994). Physically based models attempt to de- els are lost. Finally, Greco et al. (2019) presented a runout scribe the internal and external forces of all of these mass model for cohesive granular matrix. Their approach simi- movements in a generalized form (David and Richard, 2011; larly lacks a description of the fragmentation process. Thus, Pudasaini, 2012; Iverson and George, 2014). This allows within current mass movement models, there might be im- these models to be applied to a wide variety of cases, while provements available from assuming non-fragmented move- improving predictive range. A variety of both one-, two- and ment. This would allow for description of structured mass three-dimensional sets of equations exist to describe the ad- movement dynamics. vection and forces that determine the dynamics of geophysi- In this paper, a generalized mass movement model is de- cal flows. veloped to describe runout of an arbitrarily structured two- For unstructured (fully fragmented) mass movements, a phase Mohr–Coulomb material. The model extents on recent variety of models exist relating to Mohr–Coulomb mix- innovations in generalized models for Mohr–Coulomb mix- ture theory. Such mass movements are described as non- ture flow (Pudasaini, 2012; Pudasaini and Mergili, 2019). Newtonian granular flows with dominant particle–particle in- Section 2 provides the derivation of the extensive set of equa- teractions, assuming perfect mixing and continuous move- tions that describe structured mass movements in a gener- ment. Examples are debris flows and mudslides, while block alized manner. Section 3 validates the developed model by slides and rockslides do not fit these criteria. Within these comparison with results from controlled flume runout exper- models, the Mohr–Coulomb failure surface is described with iments. Additionally, Sect. 3 shows numerical simulation ex- zero cohesive strength and only an internal friction angle amples that highlight fragmentation behaviour and its influ- (Pitman and Le, 2005). Examples that simulated a single ence on runout dynamics. Finally, in Sect. 4 a discussion on mixed material exist throughout the literature (e.g. Ricken- the potential usage of the presented model is provided, to- mann et al., 2006; Julien and O’Brien, 1997; Luna et al., gether with reflection on important opportunities of improve- 2012; van Asch et al., 2014). Two-phase models describe ment. solids, fluids, and their interactions; provide additional de- tail; and generalize in important ways (Sheridan et al., 2005; Pitman and Le, 2005; Pudasaini, 2012; Iverson and George, 2 A set of mass movement equations incorporating 2014; Mergili et al., 2017). Recently, a three-phase model has internal structure been developed that includes the interactions between small and larger solid phases (Pudasaini and Mergili, 2019). Typ- 2.1 Structured mass movements ically, implemented forces include gravitational forces and, depending on the rheology of the equations, drag forces, vis- Gravitational mass flows are triggered when the local driv- cous internal forces and a plasticity criterion. The assumption ing forces within an often steep section of a slope exceed a of zero cohesion in the Mohr–Coulomb material is invalid critical threshold. The instability of such materials is gener- for any structured mass movement. Some models do imple- ally understood to take place along a failure plane (Zhang et ment a non-Newtonian viscous yield stress based on depth- al., 2011; Stead and Wolter, 2015). Along this plane, forces averaged strain estimations (Boetticher et al., 2017; Fornes exerted due to gravity and possible seismic accelerations can Geosci. Model Dev., 14, 1841–1864, 2021 https://doi.org/10.5194/gmd-14-1841-2021
B. van den Bout et al.: Towards a model for structured mass movements 1843
act as a driving force towards the downslope direction, while by fc. The solids and fluids are defined in terms of the phys-
a normal force on the terrain induces a resisting force (Xie ical properties such as densities (ρf , ρs ) and volume frac-
et al., 2006). When internal stress exceeds specified criteria, tions (αf = f f+s , αs = f +s
s
). The confined fractions of their
commonly described using Mohr–Coulomb theory, fractur- respective phases are indicated as fsc and ffc for the volume
ing occurs, and the material becomes dynamic. Observations fraction of confined solids and fluids, respectively (Eqs. 1, 2
indicate material can initially fracture predominantly at the and 3).
failure plane (Tang et al., 2009; Davies et al., 2006). Full
finite-element modelling of stability confirms no fragmenta- αs + αf = 1 (1)
tion occurs at initiation, and runout can start as a structured αs (fsc + (1 − fsc )) + αf (ffc + (1 − ffc )) = 1 (2)
mass (Matsui and San, 1992; Griffiths and Lane, 1999).
(fsc + (1 − fsc )) = (ffc + (1 − ffc )) = 1 (3)
Once movement is initiated, the material is acceler-
ated. Due to spatially non-homogeneous acceleration, either For the solids, internal friction angle (φs ) and effective
caused by a non-homogeneous terrain slope or impact with (volume-averaged) material size (ds ) are additionally de-
obstacles, internal stress can build within the moving mass. fined. We also define αc = αs + ffc αf and αu = (1 − ffc )αf to
The stress state can reach a point outside the yield surface, indicate the solids with confined-fluid and free-fluid phases,
after which some form of deformation occurs (e.g. plastic, respectively. These phases have a volume-averaged density
brittle, ductile) (Loehnert et al., 2008). In the case of rock ρsc , ρf . We let the velocities of the unconfined fluid phase
or soil material, elastic or plastic deformation is limited, and (αu = (1−ffc )αf ) be defined as uu = (uu , vu ). We assume ve-
fracturing occurs at relatively low strain values (Kaklauskas locities of the confined phases (αc = αs + ffc αf ) can validly
and Ghaboussi, 2001; Dhanmeher, 2017). Rocks and soil ad- be assumed to be identical to the velocities of the solid phase,
ditionally show predominantly brittle fracturing, where strain uc = (uc , vc ) = us = (us , vs ). A schematic depiction of the
increments at maximum stress are small (Bieniawaski, 1967; represented phases is shown in Fig. 1.
Price, 2016; Hušek et al., 2016). For soil matrices, cohe- A major assumption is made here concerning the veloc-
sive bonds between grains originate from causes such as ities of both the confined and free solids (sc and s), that
cementing, frictional contacts and root networks (Cohen et have a shared averaged velocity (us ). We deliberately limit
al., 2009). Thus, the material breaks along either the grain– the flow description to two phases, opposed to the innovative
grain bonds or on the molecular level. In practice, this pro- work of Pudasaini and Mergili (2019) that develop a multi-
cess of fragmentation has frequently been both observed mechanical three-phase model. This choice is motivated by
and studied. Cracking models for solids use stress–strain considerations of applicability (reducing the number of re-
descriptions of continuum mechanics (Menin et al., 2009; quired parameters), the infancy of three-phase flow descrip-
Ngekpe et al., 2016). Fracture models frequently use smooth tions and finally the general observations of the validity of
particle hydrodynamics (SPH) since a Lagrangian, mesh- this assumption (Ishii, 1975; Ishii and Zuber, 1979; Drew,
free solution benefits possible fracturing behaviour (Maurel 1983; Jakob et al., 2005; George and Iverson, 2016).
and Combescure, 2008; Xu et al., 2010; Osorno and Steeb, The movement of the flow is described initially by means
2017). Within the model developed below, knowledge from of mass and momentum conservation (Eqs. 4 and 5).
fracture-simulating continuum mechanical models is com-
bined with finite-element fluid dynamic models. ∂αc
The Mohr–Coulomb mixture models on which the devel- + ∇ · (αc uc ) = 0 (4)
∂t
oped model is based can be found in Pitman and Le (2005), ∂αu
Pudasaini (2012), Iverson and George, (2014), and Pudasaini + ∇ · (αu uu ) = 0 (5)
∂t
and Mergili (2019). While these are commonly named debris
flow models, their validity extends beyond this typical cate- Here we add the individual forces based on the work of
gory of mass movement. This is both apparent from model Pudasaini and Hutter (2003), Pitman and Le (2005), Puda-
applications (Mergili et al., 2018) and theoretical considera- saini (2012), Pudasaini and Fischer (2016), and Pudasaini
tions (Pudasaini, 2012). A major cause for the usage of debris and Mergili (2019) (Eqs. 6 and 7).
flow as a term here is the assumption of unstructured flow,
which we are aiming to solve in this work. ∂
(αc ρc uc ) + ∇ · (αc ρc uc ⊗ uc ) = αc ρc f
∂t
2.2 Model description − ∇ · αc Tc + pc ∇αc
+ MDG + Mvm (6)
We define two phases within the flow, solids and fluids, indi-
∂
cated by s and f , respectively. A specified fraction of solids (αu ρf uu ) + ∇ · (αu ρf uu ⊗ uu ) = αu ρf f
within this mixture is at any point part of a structured ma- ∂t
trix. This structured solid phase, indicated by sc, envelops − ∇ · αu Tu + pf ∇αu
and confines a fraction of the fluids in the mixture, indicated − MDG − Mvm (7)
https://doi.org/10.5194/gmd-14-1841-2021 Geosci. Model Dev., 14, 1841–1864, 2021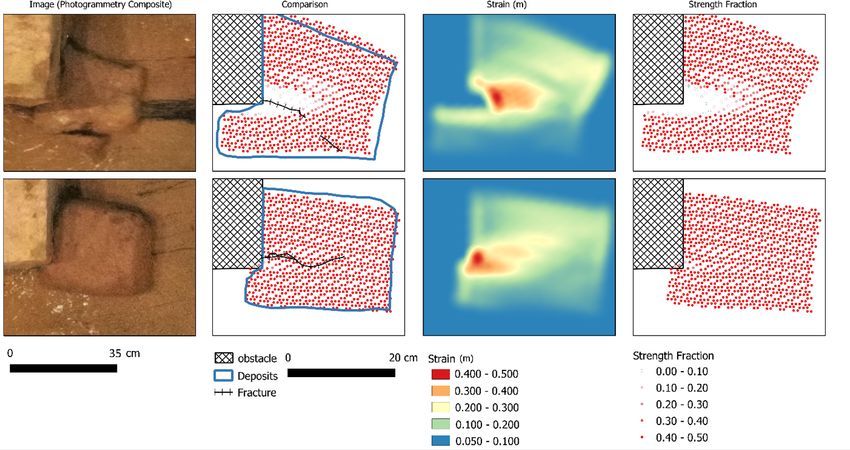
1844 B. van den Bout et al.: Towards a model for structured mass movements
Figure 1. A schematic depiction of the flow contents. Both structured and unstructured solids are present. Fluids can be either free or confined
by the structured solids.
Here f is the body force (a part of which is gravity), MDG is pressure relationship is a vertically averaged analytical so-
the drag force, Mvm is the virtual mass force, and Tc andTu lution for lateral forces exerted by an earth wall. Thus, un-
are the stress tensors for solids with confined fluids and structured columns of moving mixtures are assumed. Here,
unconfined phases, respectively. The virtual mass force de- we aim to use the full Mohr–Coulomb relations. Describ-
scribed the additional work required by differential accelera- ing the internal stress of soil and rock matrices is com-
tion of the phases. The drag force describes the drag along the monly achieved by elasto-plastic simulations of the mate-
interfacial boundary of fluids and solids. The body force de- rial’s stress–strain relationship. Since we aim to model a full
scribes external forces such as gravitational acceleration and stress description, the stress tensor is equal to the elasto-
boundary forces. Finally, the stress tensors describe the in- plastic stress tensor (Eq. 8).
ternal forces arising from strain and viscous processes. Both
the confined and unconfined phases in the mixture are subject Tc = σ (8)
to stress tensors (Tc , and Tu ), for which the gradient acts as a
momentum source. Additionally, we follow Pudasaini (2012) Here σ is the elasto-plastic stress tensor for solids. The stress
and add a buoyancy force (pc ∇αc and pf ∇αu ). can be divided into the deviatoric and non-deviatoric contri-
butions (Eq. 9). The non-deviatoric part acts normally on any
2.2.1 Stress tensors describing internal structure plane element (in the manner in which a hydrostatic pressure
acts equally in all directions). Note that we switch to ten-
Based on known two-phase mixture theory, the internal and sor notation when describing the stress–strain relationship.
external forces acting on the moving material are now set up. Thus, superscripts (α and β) represent the indices of basis
This results in several unknowns, such as the stress tensors vectors (x, y, or z axis in Euclidian space), and obtain tensor
(Tc and Tu , described by the constitutive equation), the body elements. Additionally, the Einstein convention is followed
force (f), the drag force (MDG ) and the virtual mass force (automatic summation of non-defined repeated indices in a
(Mvm ). This section will first describe the derivation of the single term).
stress tensors. These describe the internal stress and viscous
1
effects. To describe structured movements, these require a σ αβ = s αβ + σ γ γ δ αβ (9)
full stress–strain relationship, which is not present in earlier 3
generalized mass movements models. Afterwards, existing Here s is the deviatoric stress tensor and δ αβ = [α = β] is the
derivation of the body, drag and virtual mass force are altered Kronecker delta.
to conform the new constitutive equation. Here, we define the elasto-plastic stress (σ ) based on
Our first step in defining the momentum source terms a generalized Hooke-type law in tensor notation (Eqs. 10
in Eqs. (6) and (7) is the definition of the fluid and solid and 11), where plastic strain occurs when the stress state
stress tensors. Current models typically follow the assump- reaches the yield criterion (Spencer, 2012; Necas, and
tions made by Pitman and Le (2005), who indicate that “the Hlavácek, 2017; Bui et al., 2008).
proportionality (and alignment) of the tangential and normal
forces that is imposed as a basal boundary condition is as- αβ ṡ αβ 1 − 2ν m αβ
sumed to hold throughout the thin flowing layer of material ˙elastic = + σ̇ δ (10)
2G E
. . . following Rankine (1857), an earth–pressure relation is αβ ∂g
assumed for diagonal stress components.” Here, the earth– ˙plastic = λ̇ αβ (11)
∂σ
Geosci. Model Dev., 14, 1841–1864, 2021 https://doi.org/10.5194/gmd-14-1841-2021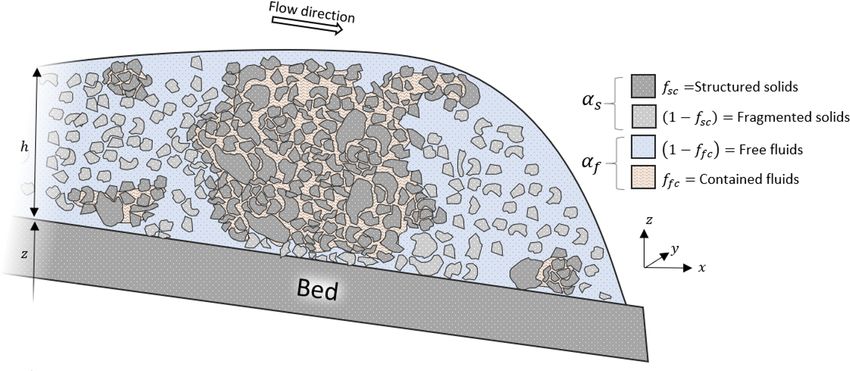
B. van den Bout et al.: Towards a model for structured mass movements 1845
Here ˙elastic is the elastic strain tensor, ˙plastic is the plastic Here the Mohr–Coulomb material parameters are used to es-
strain tensor, σ̇ m is the mean stress rate tensor, ν is Poisson’s timate the Drucker–Prager parameters (Eq. 20).
ratio, E is the elastic Young’s modulus, G is the shear modu-
lus, ṡ is the deviatoric shear stress rate tensor, λ̇ is the plastic tan (φ) 3c
αφ = p , kc = p (20)
multiplier rate and g is the plastic potential function. Addi- 9 + 12tan2 φ 9 + 12tan2 φ
tionally, the strain rate is defined from velocity gradients as
Eq. (12). Using the definitions of the yield surface and stress–strain
relationship, combining Eqs. (13), (15), (16) and (17), the re-
lationship for the stress rate can be obtained (Eqs. 21 and 22).
β
!
αβ αβ αβ 1 ∂uαc ∂uc
˙total = ˙elastic + ˙plastic = − (12)
2 ∂x β ∂x α
G αβ
αβ γ γ αβ αβ
σ̇ = 2Gė + K ˙ δ − λ̇ 9K sin ψδ + √ s (21)
J2
By solving Eqs. (9), (10) and (11) for σ̇ , a stress–strain rela-
tionship can be obtained (Eq. 13) (Bui et al., 2008). 3αK ˙ γ γ + √GJ s αβ ˙ αβ
2
λ̇ = (22)
27αφ K sin ψ + G
σ̇ αβ = 2Gėγ γ δ αβ + K ˙ γ γ δ αβ − λ̇
2G ∂g mn αβ ∂g In order to allow for the description of large deformation, the
K− δ δ + 2G (13) Jaumann stress rate can be used, which is a stress-rate that is
3 ∂σ mn ∂σ αβ
independent from a frame of reference (Eq. 23).
Here ė is the deviatoric strain rate (ėαβ = ˙ γ γ − 13 ˙ αβ δ αβ ), ψ
is the dilatancy angle, and K is the elastic bulk modulus and σ̂˙ = σ αγ ω̇βγ + σ γβ ω̇αγ + 2Gėαβ
the material parameters defined from E and ν (Eq. 14).
γ γ αβ αβ G αβ
+ K ˙ δ − λ̇ 9K sin ψ δ + √ s (23)
E E J2
K= ,G = (14)
3(1 − 2ν) 2(1 + ν) Here ω̇ is the spin rate tensor, as defined by Eq. (24).
Fracturing or failure occurs when the stress state reaches 1 ∂v α ∂v β
αβ
the yield surface, after which plastic deformation occurs. ω̇ = − (24)
2 ∂x β ∂x α
The rate of change of the plastic multiplier specifies the
magnitude of plastic loading and must ensure a new stress Due to the strain within the confined material, the density of
state conforms to the conditions of the yield criterion. By the confined solid phase (ρc ) evolves dynamically according
means of substituting Eq. (13) in the consistency condition to Eq. (25).
( ∂σ∂fαβ dσ αβ = 0), the plastic multiplier rate can be defined
v0
(Eq. 15) (Bui et al., 2008). ρc = fsc ρs + (1 − fsc ) ρs + ffc ρf (25)
v
2G αβ ∂σ∂fαβ + K − 2G 3 ˙
γ γ ∂f σ αβ δ αβ
∂σ αβ Here v is the total volume strain, ˙v ≈ 1 + 2 + 3 , i is one
λ̇ = (15) of the principal components of the strain tensor. Since we aim
2G ∂σ∂fmn ∂σ∂gmn + K − 2G
3
∂f
∂σ mn δ mn ∂g δ mn
∂σ mn
to simulate brittle materials, where volume strain remains
relatively low, we assume that changes in density are small
The yield criteria specifies a surface in the stress state space
compared to the original density of the material ( ∂ρ c
∂t
ρc ).
that the stress state can not pass and at which plastic deforma-
tion occurs. A variety of yield criteria exist, such as Mohr– 2.2.2 Fragmentation
Coulomb, Von Mises, Drucker–Prager and Tresca (Spencer,
2012). Here, we employ the Drucker–Prager model fitted Brittle fracturing is a processes commonly understood to take
to Mohr–Coulomb material parameters for its accuracy in place once a material internal stress has reached the yield
simulating rock and soil behaviour and numerical stability surface, and plastic deformation has been sufficient to pass
(Spencer, 2012; Bui et al., 2008) (Eqs. 16 and 17). the ultimate strength point (Maurel and Cumescure, 2008;
p Hušek et al., 2016). A variety of approaches to fracturing ex-
f (I1 , J2 ) = J2 + αφ I1 − kc = 0 (16) ist within the literature (Ma et al., 2014; Osomo and Steeb,
2017). Finite element method (FEM) models use strain-
p
g (I1 , J2 ) = J2 + αφ I1 sin (ψ) (17)
based approaches (Loehnert et al., 2008). For SPH imple-
Here I1 and J2 are tensor invariants (Eqs. 18 and 19). mentations, as will be presented in this work, distance-based
approaches have provided good results (Maurel and Cumbes-
I1 = σ xx + σ yy + σ zz (18) cure, 2008). Other works have used strain-based fracture cri-
1 teria (Xu et al., 2010) . Additionally, dynamic degradation
J2 = s αβ s αβ (19) of strength parameters have been implemented (Grady and
2
https://doi.org/10.5194/gmd-14-1841-2021 Geosci. Model Dev., 14, 1841–1864, 2021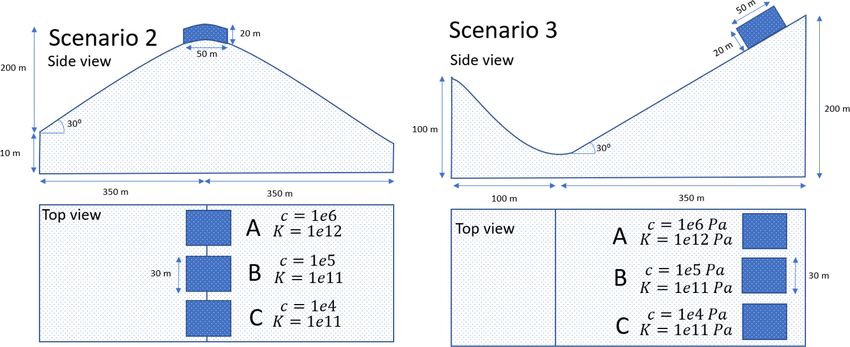
1846 B. van den Bout et al.: Towards a model for structured mass movements
Kipp, 1980; De Vuyst and Vignjevic, 2013; Williams, 2019). structure to the free fluids.
Comparisons with observed fracture behaviour has indicated
∂ffc ∂ (1 − ffc )
the predictive value of these schemes (Xu et al., 2010; Hušek =−
et al., 2016). We combine the various approaches to best fit ∂t ∂t
−ffc cc0 max(0.0,˙v )
the dynamical multi-phase mass movement model that is de- f f (I1 , J2 ) ≥ 0, c > 0
= (27)
veloped. Following Grady and Kipp (1980), we simulate a 0 otherwise
degradation of strength parameters. Our material consists of ∂fsc ∂ (1 − fsc )
a soil and rock matrix. We assume fracturing occurs along the =−
∂t ∂t
inter-granular or inter-rock contacts and bonds (see also Co-
−fsc cc0 max(0.0,˙
v )
f (I1 , J2 ) ≥ 0, c > 0
hen et al., 2009). Thus, cohesive strength is lost for any frac- = f (28)
tured contacts. We simulate degradation of cohesive strength 0 otherwise
according to a volume strain criteria. When the stress state Beyond changes in ffc through fracturing of structured solid
lies on the yield surface (the set of critical stress states within materials, no dynamics are simulated for influx or outflux of
the six-dimensional stress-space), during plastic deforma- fluids from the solid matrix. The initial volume fraction of
tion, strain is assumed to contribute to the fracturing of the fluids in the solid matrix defined by fffc and sfsc remains
granular or rock material. A critical volume strain is taken constant throughout the simulation. The validity of this as-
as a material property, and the breaking of cohesive bonds sumption can be based on the slow typical fluid velocities in
occurs based on the relative volume strain. Following Grady a solid matrix relative to fragmented mixed fluid–solid flow
and Kipp (1980) and De Vuyst and Vignjevic (2013), we as- velocities (Kern, 1995; Saxton and Rawls, 2006). While the
sume that the degradation behaviour of the strength param- addition of evolving saturation would extend the validity of
eter is distributed according to a probability density distri- the model, it would require implementation of pre-transfer
bution. Commonly, a Weibull distribution is used (Williams, functions for evolving material properties, which is beyond
2019). Here, for simplicity we use a uniform distribution of the scope of this work. An important note on the points
cohesive strength between 0 and 2c0 , although any other dis- made above is the manner in which fluids are re-partitioned
tribution can be substituted. Thus, the expression governing after fragmentation. All fluids in fragmented solids are re-
cohesive strength becomes Eq. (26). leased, but this does not equate to free movement of the flu-
ids or a disconnection from the solids that confined them.
v
Instead, the equations continue to connect the solids and flu-
∂c −c 1 v0 f (I1 , J2 ) ≥ 0, c > 0 ids through drag, viscous and virtual mass forces. Finally, the
= 0 2 c (26)
∂t 0 otherwise density of the fragmented solids is assumed to be the initially
set solid density. Any strain-induced density changes are as-
sumed small relative to the initial solid density ( ρρcs
1).
Here c0 is the initialcohesive strength of the material, v0 is
2.2.4 Fluid stresses
the initial volume, v0v is the fractional volumetric strain
rate and c is the critical fractional volume strain for fractur- The fluid stress tensor is determined by the pressure and the
ing. viscous terms (Eqs. 29 and 30). Confined solids are assumed
to be saturated and constant during the flow.
2.2.3 Water partitioning Tu = pf I + τ f (29)
τ f = ηf ∇uu + (∇uc )t
During the movement of the mixed mass, the solids can ηf
thus be present as a structured matrix. Within such a ma- − A (αu ) (∇αc (uu − uc ) + (uc − uu ) ∇αc ) (30)
αu
trix, a fluid volume can be contained (e.g. as originating
from a groundwater content in the original landslide ma- Here I is the identity tensor, τ f is the viscous stress tensor for
terial). These fluids are typically described as groundwater fluids , pf is the fluid pressure, ηf is the dynamic viscosity of
flow following Darcy’s law, which poses a linear relationship the fluids and A is the mobility of the fluids at the interface
between pressure gradients and flow velocity through a soil with the solids that acts as a phenomenological parameter
matrix. In our case, we assumed the relative velocity of water (Pudasaini, 2012).
flow within the granular solid matrix as very small compared The fluid pressure acts only on the free fluids here, as
to both solid velocities and the velocities of the free fluids. As the confined fluids are moved together with the solids. In
an initial condition of the material, some fraction of the wa- Eq. (30), the second term is related to the non-Newtonian vis-
ter is contained within the soil matrix (ffc ). Additionally, for cous force induced by gradients in solid concentration. The
loss of cohesive structure within the solid phase, we trans- effect as described by Pudasaini (2012) is induced by a solid
fer the related fraction of fluids contained within that solid concentration gradient. In the case of unconfined fluids and
Geosci. Model Dev., 14, 1841–1864, 2021 https://doi.org/10.5194/gmd-14-1841-2021
B. van den Bout et al.: Towards a model for structured mass movements 1847
unstructured solids (fsc = 0, ffc = 0); this force is identical (Eq. 35). The adapted implementation considers the solids
to the description in the unstructured equations. Within our together with confined fluids to move through a free-fluid
flow description, we see no direct reason to eliminate or alter phase.
this force with a variation in the fraction of confined fluids
or structured solids. We only consider the interface between 1 1 + 2αc ∂uu
CVMG = αc ρu + uu · ∇uu
solids and free fluids as an agent that induces this effect, and 2 αu ∂t
therefore the gradient of the gradient of the solids and con- ∂uc
fined fluids (∇(αs +ffc αf ) = ∇αc ) is used instead of the total − + uc · ∇uc (35)
∂t
solid phase (∇αs ).
Here CDG = 12 1+2α αu
c
is the drag coefficient.
2.2.5 Drag force and virtual mass
Our description of the drag force follows the work of Pu- 2.2.6 Boundary conditions
dasaini (2012), Pudasaini et al. (2018), where a generalized
Finally, following the work of Iverson and Denlinger (2001),
two-phase drag model is introduced and enhanced. We split
Pitman and Le (2005), and Pudasaini (2012), a boundary
their work into a contribution from the fraction of structured
condition is applied to the surface elements that contact the
solids (fsc ) and unconfined fluids (1 − ffc ) (Eq. 31).
flow (Eq. 36).
fsc αc αu (ρc − ρf ) g
CDG = (uu − uc ) |uu − uc |j −1 |S| = N tan(φ) (36)
UT,c (G (Re)) + Sp
(1 − fsc )αc αu (ρs − ρf ) g Here N is the normal pressure on the surface element and S
+ is the shear stress.
UT,uc PF Rep + (1 − P) G (Re) + Sp
(uu − uc ) |uu − uc |j −1 (31) 2.3 Depth-averaging
Here UT,c is the terminal or settling velocity of the struc- The majority of the depth-averaging in this work is analo-
tured solids, UT,uc is the terminal velocity of the unconfined gous to the work of Pitman and Le (2005), Pudasaini (2012),
solids, P is a factor that combines solid- and fluid-like contri- and Pudasini and Mergili (2019). Depth-averaging through
butions to the drag force, G is the solid-like drag contribution, integration over the vertical extent of the flow can be done
F is the fluid-like drag contribution, and Sp is the smoothing based on several useful and often-used assumptions, e.g.
1 h
R
function (Eqs. 32 and 34). The exponent j indicates the type xdh = x, for the velocities (uu and uc ); solid, fluid, and
h 0
of drag: linear (j = 0) or quadratic (j = 1). confined fractions (αf , αs , ffc and fsc ); and material proper-
Within the drag, the following functions are defined: ties (ρu , φ and c). Besides these similarities and an identical
3 derivation of depth-averaged continuity equations, three ma-
γ αf M (Rep )−1 jor differences arise.
F= Rep , G = αf . (32)
180 αs
i. Fluid pressure. Previous implementations of general-
P 1−P
Sp = ( + )K, (33) ized two-phase debris flow equations have commonly
αc αu assumed hydrostatic pressure ( ∂p z
∂z = g ) (Pitman and
K = |αc uc + αu uu | ≈ 10 m s−1 , (34) Le, 2005; Pudasaini, 2012; Abe and Konagai, 2016).
Here we follow this assumption for the fluid pressure
where M is a parameter that varies between 2.4 and 4.65 at the base and solid pressure for unstructured material
based on the Reynolds number (Pitman and Le, 2005). The (Eqs. 37 and 38).
factor P that combines solid- and fluid-like contributions to
the drag is dependent on the volumetricsolid content inthe Pbs,u = − (1 − γ ) αs g z h (37)
m
αs (1−fsc ) z
unconfined and unstructured materials P = αf (1−ffc ) Pbu = −g h (38)
with m ≈ 1. Additionally, we assume the factor P is zero
for drag originating from the structured solids. As stated by Here γ = ρρsf is the density ratio (not to be confused with
Pudasaini and Mergili (2019), “as limiting cases: P suit- a tensor index when used in superscript) (–).
ably models solid particles moving through a fluid”. In our However, larger blocks of structure material can have
model, the drag force acts on the unconfined fluid momen- contact with the basal topography. Due to density dif-
tum (uuc αf (1 − ffc )). For interactions between unconfined ferences, larger blocks of solid structures are likely to
fluids and structured solids, larger blocks of solid structures move along the base (Pailhia and Pouliquen, 2009; Iver-
are moving through fluids that contains solids of smaller size. son and George, 2014). If these blocks are saturated,
Virtual mass is similarly implemented based on the work water pressure propagates through the solid matrix and
of Pudasaini (2012) and Pudasaini and Mergili (2019) hydrostatic pressure is retained. However, in cases of
https://doi.org/10.5194/gmd-14-1841-2021 Geosci. Model Dev., 14, 1841–1864, 2021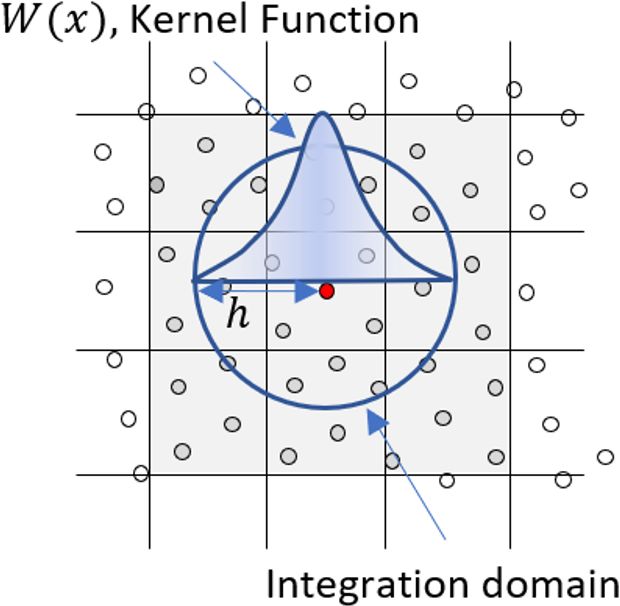
1848 B. van den Bout et al.: Towards a model for structured mass movements
an unsaturated solid matrix that connects to the base, iii. Depth-averaging other terms. While the majority of
hydrostatic pressure is not present there. We introduce terms allow for depth-averaging as it was proposed by
a basal fluid pressure propagation factor B(θeff , dsc , . . .) Pudasaini (2012), an exception arises. Depth-averaging
that describes the fraction of fluid pressure propagated of the vertical viscosity terms is required. The non-
through a solid matrix (with θeff as the effective satu- Newtonian viscous terms for the fluid phase were de-
ration, and as dsc the average size of structured solid rived assuming a vertical profile in the volumetric solid
matrix blocks). This results in a basal pressure equal to phase content. Here, we alter the derivation to use this
Eq. (39). assumption only for the non-structured solids, as op-
(1 − fsc ) αs z posed to the structured solids where ∂α s
∂z = 0.
Pbc = − (1 − fsc ) (1 − γ ) g h
(1 − ffc ) αf Z s
∂ ∂αs
∂αs
s
(fsc ) αs z (uu − uc ) dz = (uu − uc )
− fsc (1 − γ ) B g h (39) b ∂z ∂z ∂z b
(ffc ) αf
∂αs s
= (uu − uc )
The basal pressure propagation factor (B) should the- ∂z b
oretically depend mostly on saturation level, similarly
∂αs s
to the pedotransfer function, as a full saturation means = (uu − uc )
∂z b
perfect propagation of pressure through the mixture, and (uu − uc ) (1 − fsc ) ζ αs
low saturation equates to minimal pressure propagation = (45)
h
(Saxton and Rawls, 2006). Additionally, it should de-
pend on pedotransfer functions and the size distribution Here ζ is the shape factor for the vertical distribution
of structured solid matrices within the mixture. For low of solids (Pudasaini, 2012). Additionally, the momen-
saturation levels, it can be assumed that no fluid pres- tum balance of Pudasaini (2012) ignores any deviatoric
sure is retained. Combined with an assumed soil ma- stress (τxy = 0), following Savage and Hutter (1989)
trix height being identical to the total mixture height, and Pudasaini and Hutter (2007). Previously this term
this results in B = 0. Assuming saturation of a struc- has been included by Iverson and Denlinger (2001), Pit-
ture’s solids results in a full propagation of pressures man and Le (2005), and Abe and Kanogai (2016). Here
and B = 1. we include these terms since a full stress–strain relation-
ship is included.
ii. Stress–strain relationship. Depth-averaging the stress–
strain relationship in Eqs. (22) and (23) requires a verti- 2.3.1 Basal frictions
cal solution for the internal stress. First, we assume any
non-normal vertical terms are zero (Eq. 40). Commonly, Additionally we add the Darcy–Weisbach friction, which is a
Rankine’s earth pressure coefficients are used to express Chézy-type friction law for the fluid phase that provides drag
the lateral earth pressure by assuming vertical stress to (Delestre et al., 2014). This ensures that without solid phase
be induced by the basal solid pressure (Eqs. 41 and 42) a clear fluid does lose momentum due to friction from basal
(Pitman and Le, 2005; Pudasaini, 2012; Abe and Kona- shear. This was successfully done in Bout et al. (2018) and
gai, 2016). was similarly assumed in Pudasaini and Fischer (2016) for
fluid basal shear stress.
σ zx = σ zy = σ yz = σ xz = 0 (40)
1 g uu |uu |
σ zz = Pbs , σ zz b = Pbs (41) Sf = (46)
2 n2 h 43
1 − sin (φ) 1 − sin (φ)
Ka = , Kp = (42) Here n is Manning’s surface roughness coefficient.
1 + sin(φ) 1 + sin(φ)
Here we enhance this with Bell’s extension for cohe- 2.3.2 Depth-averaged equations
sive soils (Eq. 45) (Xu et al., 2019). This lateral normal-
directed stress term is added to the full stress–strain so- The following set of equations is thus finally achieved for
lution. depth-averaged flow over sloping terrain (Eqs. 47–71).
√ 1 h
Z
∂h ∂ ∂
σxx = Kσzzb − 2c K + σxx dh (43) + [h (αu uu + αc uc )] + [h (αu uu + αc uc )]
h 0 ∂t ∂x ∂y
Finally, the gradient in pressure of the lateral interfaces = R−I (47)
between the mixture is added as a depth-averaged accel- ∂αc h ∂αc huc ∂αc hvc
eration term (Eq. 44). + + =0 (48)
∂t ∂x ∂y
1 ∂ (hσ xx ) ∂ (hσ yx )
∂αu h ∂αu huu ∂αu hvu
Sx c = α c ( + ) + ... (44) + + = R−I (49)
h ∂x ∂y ∂t ∂x ∂y
Geosci. Model Dev., 14, 1841–1864, 2021 https://doi.org/10.5194/gmd-14-1841-2021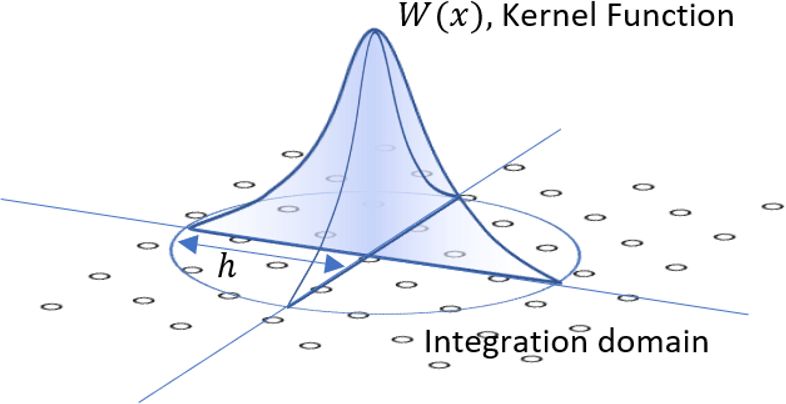
B. van den Bout et al.: Towards a model for structured mass movements 1849
∂
"
1
2 Pbu h ∂αc ∂b
αc h (uc − γc CVM (uu − uc )) S = α g y
− + Pbu
∂t yu u
αf ∂y ∂y
∂ h
2
2 2
i
+ αc h uc − γc CVM uu − uc !
∂x Aηu ∂ 2 uf ∂ 2 vf ∂ 2 uf Xuf
− 2 + + − 2 2
∂ αu ∂y 2 ∂xy ∂x 2 h
+ αc h (uc vc − γ C (uu vu − uc vc )) = hSxc (50)
∂y Aηu
∂
∂
∂ + 2 (vu − vc )
αc h (vc − γc CVM (vu − vc )) α c ∂y ∂y
∂t
∂ ∂αc ∂αc
∂ + (uu − uc ) + (vu − vc )
+ αc h (us vs − γc CVM (uu vu − uc vc )) ∂x ∂y ∂x
∂x
Aηu ζ αs (1 − fsc ) (vu − vc ) g vu |uu |
∂ h
2
2 2
i
− − 2
+ αc h vc − γ CVM vu − vc = hSyc (51) αu h2 n h 34
∂y
∂
αc
1
αu h uu − CVM (uu − uc ) − CDG (vu − vc ) |uu − uc |J −1 (57)
∂t αu γ c
∂
α c
β h
x
(1 − fsc ) αs z
+ αu h u2u − CVM u2u − u2c + u Pbc = − (1 − fsc ) (1 − γ ) g h
∂x αu 2 (1 − ffc ) αf
∂ (fsc ) αs z
+ αu h (uu vu − γc CVM (uu vu − uc vc )) − fsc (1 − γ ) g h (58)
∂y (ffc ) αf
= hSxu − I uu (52) Pbu = −g z h (59)
∂ αc ρu ρf
αu h vu − CVM (vu − vc ) γc = , γ = (60)
∂t αu ρc ρs
∂
αc
fsc αc αu (ρc − ρf ) g
+ αu h uu vu − CVM (uu vu − uc vc ) CDG =
∂x αu UT,c (G (Re)) + Sp
(1 − fsc )αc αu (ρs − ρf ) g
∂ βy h
+ αu h vu2 − γc CVM vu2 − vc2 + u + (61)
∂y 2 UT,uc PF Rep + (1 − P) G (Re) + Sp
= hSyu − I vu (53) P 1−P
xx ) yx )
Sp = ( + )K (62)
x 1 ∂ (hσ ∂ (hσ α c αu
Sxc = αc g + +
h ∂x ∂y K = |αc uc + αu uu | (63)
3
uc ∂b ∂h ∂b γ αf M (Rep )−1
−Pbc ( tan φ + ) − αc γc pbu + F= ReP , G = αf ,
|uc | ∂x ∂x ∂x 180 αs
√
+ CDG (uu − uc ) |uu − uc |J −1 (54) ρf dUt gLH ρf
xy yy Rep = , NR = ,
1 ∂ (hσ ) ∂ (hσ ) ηf αf ηf
Syc = αc g y + + √
h ∂x ∂y gLH ρf
NRA = (64)
vs ∂b ∂h ∂b Aη
−Pbc ( tan φ + ) − αc γc pbu + f
|us | ∂y ∂y ∂y 1 1 + 2αc
CVM = (65)
+ CDG (vu − vc ) |vu − vc |J −1 (55) 2 αu
"
1 ˙σ̂ = σ αγ ω̇βγ + σ γβ ω̇αγ + 2Gėαβ
Pbu h ∂αc ∂b Aηu
Sxu = αu g x − 2 + Pbu −
αu ∂x ∂x αu G
+ K ˙ γ γ δ αβ − λ̇ 9K sin ψ δ αβ + √ s αβ (66)
2
∂ uu ∂ 2 vu ∂ 2 uu Xuu
J2
2 2 + + −
∂x ∂xy ∂y 2 2 h2 3αK ˙ γ γ + √GJ s αβ ˙ αβ
2
Aηu
∂
∂
∂ ∂αc λ̇ = (67)
+ 2 (uu − uc ) + (vu − vc ) 27α φ K sin ψ +G
αu ∂x ∂x ∂y ∂x E E
∂αu
Aηu ζ αs (1 − fsc ) (uu − uc ) K= ,G = (68)
+ (uu − uc ) − 3(1 − 2ν) 2(1 + ν)
∂y α u h2 1
g uu |uu |
1 σ αβ = s αβ + σ γ γ δ αβ (69)
− 2 − C DG u(u − u c ) |u u − u c | J −1
(56) 3
n h 43 γc 1
α
∂v ∂v β
1 ∂v α ∂v β
αβ αβ
˙ = − ω̇ = − (70)
2 ∂x β ∂x α 2 ∂x β ∂x α
https://doi.org/10.5194/gmd-14-1841-2021 Geosci. Model Dev., 14, 1841–1864, 20211850 B. van den Bout et al.: Towards a model for structured mass movements
tan (φ) 3c
αφ = p kc = p (71) the fluid dynamics, which are so successfully described by
9 + 12tan2 φ 9 + 12tan2 φ the that method (particularly for water in larger areas; see
Bout et al., 2018).
Here X is the shape factor for vertical shearing of the fluid
(X ≈ 3 in Iverson and Denlinger, 2001), R is the precipita- 2.4.1 Mathematical framework
tion rate and I is the infiltration rate.
The mathematic framework of smooth particles solves dif-
2.3.3 Closing the equations ferential equations using discretized volumes of mass repre-
sented by kernel functions (Libersky and Petschek, 1991; Bui
Viscosity is estimated using the empirical expression from
et al., 2008; Stomakhin et al., 2013). Here, we use the cubic
Julien and O’Brien (1997), which relates dynamic viscosity
spline kernel as used by Monaghan (2000) (Eq. 74).
to the solid concentration of the fluid (Eq. 72).
10 3 2 3 3
η = αeβαs 2 1 − 2q + 4q 0 ≤ |q| ≥ 2
(72) 7πh
W (r, h) = 10
(2 − q)3
1 ≤ |q| < 2 (74)
28πh2
Here α is the first viscosity parameter and β the second vis- 0 |q| ≥ 2 | q < 0
cosity parameter.
Finally, the settling velocity of small (d1 mm), the equation by Using this function mathematical operators can be defined.
Zanke (1977) is used (Eq. 73). The average is calculated using a weighted sum of particle
values (Eq. 75), while the derivative depends on the function
v
values and the derivative of the kernel by means of the chain
u
η2 u (ρs − ρf ) 3
0.01 ρf gd rule (Eq. 76) (Libersky and Petschek, 1991; Bui et al., 2008).
ρ u
UT = 10 f t1 +
η − 1 (73)
d
ρf
X N mj
hf (x)i = j =1 ρj
f xj W (x − xj , h) (75)
X
In which UT is the settling (or terminal) velocity of a solid ∂f (x) N mj ∂Wij
= f xj (76)
grain, η is the dynamic viscosity of the fluid, ρf is the density ∂x j =1 ρj ∂xi
of the fluid, ρs is the density of the solids and d is the grain
diameter (m). Here Wij = W (xi − xj , h) is the weight of particle j to parti-
cle I , and r = xi − xj is the distance between two particles.
2.4 Implementation in the material point method The derivative of the weight function is defined by Eq. (77).
numerical scheme
∂Wij xi − xj ∂Wij
= (77)
Implementing the presented set of equations into a numeri- ∂xi r ∂r
cal scheme requires considerations of that scheme’s limita-
Using these tools, the momentum equations for the parti-
tions and strengths (Stomakhin et al., 2013). Fluid dynam-
cles can be defined (Eqs. 78–84). Here, we follow Mon-
ics are almost exclusively solved using an Eulerian finite-
aghan (2000) and Bui et al. (2008) for the definition of artifi-
element solution (Delestre et al., 2014; Bout et al., 2018).
cial numerical forces related to stability. Additionally, stress-
The diffusive advection part of such scheme typically does
based forces are calculated on the particle level, while other
not degrade the quality of modelling results. Solid material,
momentum source terms are solved on a Eulerian grid with
however, is commonly simulated with higher accuracy us-
spacing h (identical to the kernel size).
ing an Lagrangian finite-element method or discrete-element
method (Maurel and Cumbescure, 2008; Stomakhin et al., dviα 1
2013). Such schemes more easily allow for the material to = Fg + Fgrid
dt mi
maintain its physical properties during movement. Addition- αβ
αβ σj
ally, advection in these schemes does not artificially diffuse XN σi αβ
+ mj + + Fijn Rij
the material since the material itself is discretized, instead of j =1 ρi2 ρj2
the space (grid) on which the equations are solved. In our ∂Wij
case, the material point method (MPM) provides an appro- +5ij δ αβ β
(78)
priate tool to implement the set of presented equations (Bui ∂xi
et al., 2008; Maurel and Cumbescure, 2008; Stomakhin et 1 XN mj α α ∂Wij
al., 2013). Numerous existing modelling studies have imple- ˙ αβ = j =1 ρj
vj − VI β
2 ∂xi
mented in this method (Pastor et al., 2014; Abe and Kanogai,
2016). Here, we use the MPM method to create a two-phase XN mj β β ∂Wij
+ j =1 vj − V I (79)
scheme. This allows the usage of finite-element aspects for ρj ∂xiα
Geosci. Model Dev., 14, 1841–1864, 2021 https://doi.org/10.5194/gmd-14-1841-2021B. van den Bout et al.: Towards a model for structured mass movements 1851
1 XN mj α α ∂Wij
ω̇αβ = j =1 ρj
v j − VI β
2 ∂xi
XN mj β
β ∂Wij
− j =1 vj − VI (80)
ρj ∂xiα
dσαβ αγ βγ γβ αγ
= σi ω̇i + σi ω̇i
dt
αβ αβ
+ 2Gi ėi + Ki ˙ γ γ δi
" #
αβ Gi αβ
− λ˙i 9Ki sin ψi δ + p si (81)
J2i
Figure 2. Example of a kernel function used as integration domain
γγ αβ
3αK ˙i + √Gi si ˙i αβ for mathematical operations.
j2i
λ˙i = (82)
27αφ Ki sin ψi + Gi
The R2 sequence approaches, with a regular quasi-random
Here i and j are indices indicating the particle, 5ij is an ar- sequence, a set of evenly distributed points within a square
tificial viscous force as defined by Eqs. (83) and (84), and (Roberts, 2020) (Eq. 85).
αβ
Fijn Rij is an artificial stress term as defined by Eqs. (85)
and (86).
!
1 1
xn = nαmod1, α = , (88)
(
α5 usoundij φij +β5 φ 2 cp c2p
5ij = ρij vij · xij < 0 (83)
0 vij · xij ≥ 0 Here xn is the relative location of the nth particle
√ 1 √ 1
hij vij xij 3 3
φij = , xij = xi − xj , within a grid cell, and cp = 9+18 69 + 9−18 69 ≈
2
xij + 0.01h2ij 1.32471795572 is the plastic constant.
1 The number of particles placed for a particular flow height
vij = vi − vj , hij = hi + hj (84) depends on the particle volume VI , which is taken as a global
2
Wij
n constant during the simulation.
αβ αβ αβ
Fijn Rij = (Ri + Rj ) (85)
W (d0 , h)
γγ
0 σi 3 Flume experiments
γγ
Ri =− (86)
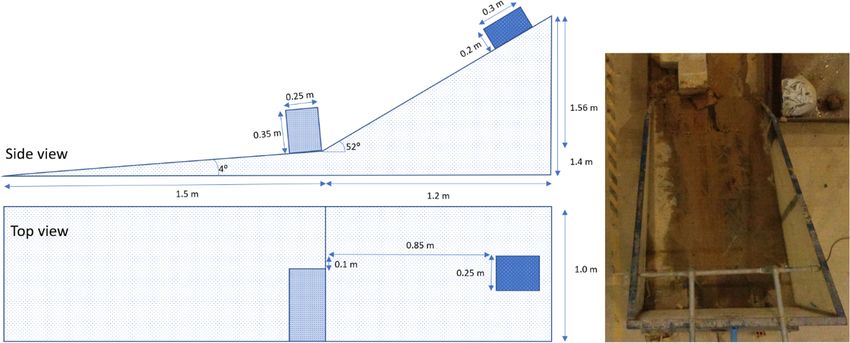
ρi2 3.1 Flume setup
Here 0 is a small parameter ranging from 0 to 1, α5 and In order to validate the presented model, several controlled
β5 are constants in the artificial viscous force (often chosen experiments were performed and reproduced using the devel-
close to 1), and usound is the speed of sound in the material. oped equations. The flume setup consists of a steep incline,
The conversion from particles to gridded values and vice followed by a near-flat runout plane (Fig. 3). A massive ob-
versa depends on a grid basis function that weighs the in- stacle is placed on the separation point of the two planes.
fluence of particle values for a grid centre. Here, a function This blocks the path of two-fifths of the width of the moving
derived from dyadic products of one-dimensional cubic B- material. For the exact dimensions of both the flume parts
splines is used as has been done previously by Steffen et and the obstacle, see Fig. 3.
al. (2008) and Stomakhin et al. (2013) (Eq. 84). Two tests were performed whereby a cohesive granular
N (x) = N x x · N x y ,
matrix was released at the upper part of the flume setup.
1 Both of these volumes had dimensions of 0.2 × 0.3 × 0.25 m
2 |x|3 − x 2 + 23 0 ≤ |x| ≥ 2 (height, length, width). For both of these materials, a
N (x) = 1 3 2 4 (87)
− 6 |x| + x − 2 |x| + 3 1 ≤ |x| < 2 mixture of high-organic-content silty-clay soils where used.
0 |x| ≥ 2|x = 0
The material’s strength parameters were obtained using
2.4.2 Particle placement tri-axial testing (cohesion, internal friction angle Young’s
modulus and Poisson ratio). The first set of materials
Particle placement is typically done in a constant pattern, as properties were c = 26.7 kPa and φ = 28◦ . The second set
initial conditions have some constant density. The simplest of materials properties were c = 18.3 kPa and φ = 27◦ .
approach is a regular square or triangular network, with parti- For both of the events, pre- and post-release elevation
cles on the corners of the network. Here, we use an approach models were made using photogrammetry. The model
that is more adaptable to spatially varying initial flow height. was set up to replicate the situations using the measured
https://doi.org/10.5194/gmd-14-1841-2021 Geosci. Model Dev., 14, 1841–1864, 20211852 B. van den Bout et al.: Towards a model for structured mass movements
Figure 3. Example particle distributions using the R2 sequence, note that while not all particles are equidistant, the method produces
distributed particle patterns that adapt well to varying density.
Figure 4. The dimensions of the flume experiment setup used in this work.
input parameters. Numerical settings were chosen as fol- ters took place. In the results, a fracture line developed along
lows: {αs = 0.5, αf = 0.5, fsc = 1.0, ffc = 1.0, ρf = 1000, the corner of the obstacle into the length direction of the
ρs = 2400, E = 12 · 106 Pa, K = 23 · 106 Pa, ψ = 0, α5 = moving mass. Eventually, this fracture developed to half the
1, β5 = 1, X, ζ, j = 2, usound = 600, dx = 10, VI = length of the moving body and severe deformation resulted.
0 m/s, h = 10, n = 0.1, α = 1, β = 10, M = 2.4, B = As was observed from the tests, the first material experienced
0, NR = 15 000, NRA = 30}. Calibration was performed a critical fracture, while the second test resulted in moderate
by means of input variation. The solid fraction and elastic deformation near the impact location. Generally, the results
and bulk modulus were varied between 20 % and 200 % of compare well with the observed patterns, although the ex-
their original values with increments of 10 %. Accuracy was act shape of the fracture is not replicated. Several reasons
assessed based on the percentage accuracy of the deposition might be the cause of the moderately accurate fracture pat-
(comparison of the modelled vs. the observed presence of terns. Other studies used a more controlled setup where un-
material). certainties in applied stress and material properties were re-
duced. Furthermore, the homogeneity of the material used in
3.2 Results the tests can not completely assumed. Realistically, minor al-
terations in compression used to create the clay blocks have
Both the mapped extent of the material after flume experi- left spatial variation in density, cohesion and other strength
ments, as the simulation results are shown in Fig. 5. Cali- parameters.
brated values for the simulations are {αs = 0.45, E = 21.6 ·
106 Pa, K = 13.8 · 106 Pa }.
As soon as the block of material impacts the obstacle,
stress increases as the moving object is deformed. This stress
quickly propagates through the object. Within the scenario
with lower cohesive strength, as soon as the stress reached
beyond the yield strength, degradation of strength parame-
Geosci. Model Dev., 14, 1841–1864, 2021 https://doi.org/10.5194/gmd-14-1841-2021B. van den Bout et al.: Towards a model for structured mass movements 1853
Figure 5. A comparison of the final deposits of the simulations and the mapped final deposits and cracks within the material: (from left to
right) photogrammetry mosaic, comparison of simulation results to mapped flume experiment, strain, final strength fraction remaining.
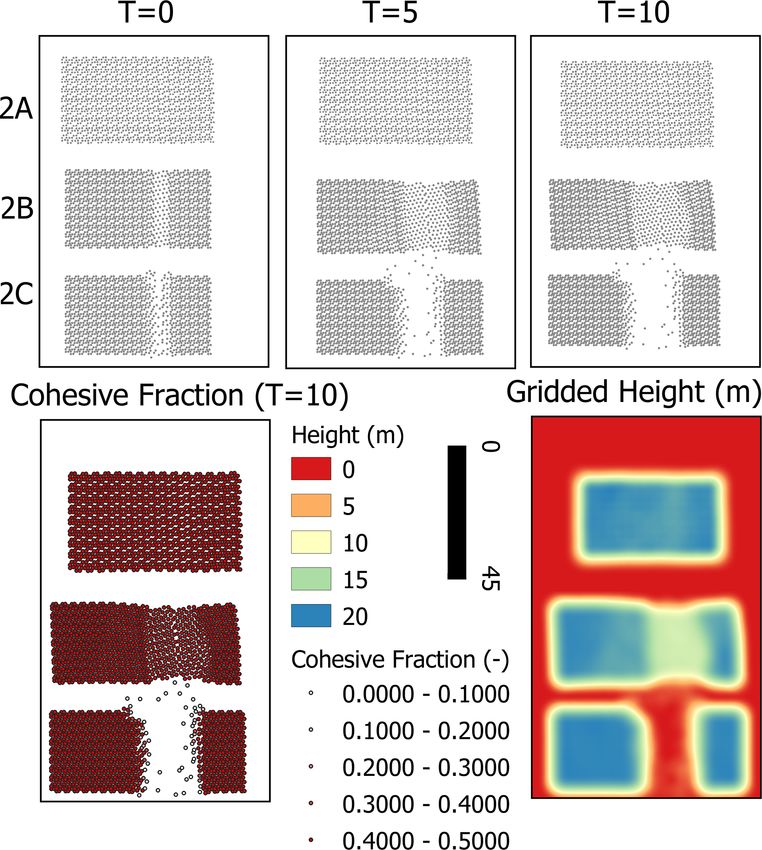
4 Numerical tests fracturing is present in the remaining cohesive fraction. This
value only reduces in the case of plastic yield, where increas-
4.1 Numerical setup ing strain degrades strength parameters according to our pro-
posed criteria. Numerical fractures would thus have a cohe-
In order to further investigate some of the behaviours of the sive fraction of 1. In all simulated scenarios, such numerical
model and highlight the novel types of mass movement dy- issues were not observed.
namics that the model implements, several numerical tests Fragmentation occurs due to spatial variation in acceler-
have been performed. The setup of these tests is shown in ation in the case of scenario 3A and 3B. For scenario 3A,
Fig. 6. the yield surface is not reached and the original structure
Numerical settings were chosen for three different of the mass is maintained during movement. For 3C, frag-
blocks with equal volumes but distinct properties. Co- mentation is induced by lateral pressure and buoyancy forces
hesive strength and the bulk modulus were varied (see alone. Scenario 3B experiences slight fragmentation at the
Fig. 6). Remaining parameters were chosen as follows: edges of the mass but predominantly fragments when reach-
{αs = 0.5, αf = 0.5, fsc = 1.0, ffc = 1.0, ρf = 1000 kg m−3 , ing the valley, after which part of the material is accelerated
ρs = 2400 kg m−3 , E = 1e12 Pa, ψ = 0, α5 = 1, β5 = to count to the velocity of the mass. For all the shown simu-
1, X, ζ, j = 2, usound = 600 m s−1 , dx = 10m, VI = lations, fragmentation does not lead to significant phase sep-
0 m/s, h = 10 m, n = 0.1, α = 1, β = 10, M = 2.4, B = aration since virtual mass and drag forces converge the sepa-
0, NR = 15 000, NRA = 30}. rate phase velocities to their mixture-averaged velocity. The
strength of these forces partly depends on the parameters; ef-
4.2 Results fects of more immediate phase separation could be studied if
other parameters are used as input.
Several time slices for the described numerical scenarios are
shown in Figs. 7 and 8.
Fractures develop in the mass movements based on accel- 5 Discussion
eration differences and cohesive strength. For scenario 2A,
the stress state does not reach beyond the yield surface, and A variety of existing landslide models simulate the behaviour
all material is moved as a single block. Scenario 2B, which of lateral connected material through a non-linear, non-
features lowered cohesive strength, fractures and the masses Newtonian viscous relationship (von Boetticher et al., 2017;
separate based on the acceleration caused by slopes. Fornes et al., 2017; Pudasaini and Mergili, 2019; Greco et
Fracturing behaviour can occur in MPM schemes due to al., 2019). These relationships include a yield stress and are
numerical limitations inherent in the usage of a limited in- usually regularized to prevent singularities from occurring.
tegration domain. Here, validation of real physically based While this approach is incredibly powerful, it is fundamen-
https://doi.org/10.5194/gmd-14-1841-2021 Geosci. Model Dev., 14, 1841–1864, 2021You can also read

















































