TDCOSMO XIII. Improved Hubble constant measurement from lensing time delays using spatially resolved stellar kinematics of the lens galaxy
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
FERMILAB-PUB-23-013-PPD
Astronomy & Astrophysics manuscript no. ms ©ESO 2023
January 9, 2023
TDCOSMO
XIII. Improved Hubble constant measurement from lensing time delays using
spatially resolved stellar kinematics of the lens galaxy
Anowar J. Shajib,1, 2,? Pritom Mozumdar,3 Geoff C.-F. Chen,4 Tommaso Treu,4 Michele Cappellari,5 Shawn Knabel,4
Sherry H. Suyu,6, 7, 8 Vardha N. Bennert,9 Joshua A. Frieman,1, 2, 10 Dominique Sluse,11 Simon Birrer,12, 13, 14
Frederic Courbin,15 Christopher D. Fassnacht,3 Lizvette Villafaña,4 Peter R. Williams4
(Affiliations can be found after the references)
Received xxx, xxxx; accepted xxx, xxxx
arXiv:2301.02656v1 [astro-ph.CO] 6 Jan 2023
ABSTRACT
Strong-lensing time delays enable measurement of the Hubble constant (H0 ) independently of other traditional methods. The main limitation to
the precision of time-delay cosmography is mass-sheet degeneracy (MSD). Some of the previous TDCOSMO analyses broke the MSD by making
standard assumptions about the mass density profile of the lens galaxy, reaching 2% precision from seven lenses. However, this approach could
potentially bias the H0 measurement or underestimate the errors. In this work, for the first time, we break the MSD using spatially resolved
kinematics of the lens galaxy in RXJ1131−1231 obtained from the Keck Cosmic Web Imager spectroscopy, in combination with previously
published time delay and lens models derived from Hubble Space Telescope imaging. This approach allows us to robustly estimate H0 , effectively
implementing a maximally flexible mass model. Following a blind analysis, we estimate the angular diameter distance to the lens galaxy Dd =
865+85 +472 +7.3
−81 Mpc and the time-delay distance D∆t = 2180−271 Mpc, giving H0 = 77.1−7.1 km s
−1
Mpc−1 – for a flat Λ cold dark matter cosmology. The
error budget accounts for all uncertainties, including the MSD inherent to the lens mass profile and the line-of-sight effects, and those related to the
mass–anisotropy degeneracy and projection effects. Our new measurement is in excellent agreement with those obtained in the past using standard
simply parametrized mass profiles for this single system (H0 = 78.3+3.4
−3.3 km s
−1
Mpc−1 ) and for seven lenses (H0 = 74.2+1.6
−1.6 km s
−1
Mpc−1 ), or for
+5.8
seven lenses using single-aperture kinematics and the same maximally flexible models used by us (H0 = 73.3−5.8 km s Mpc ). This agreement
−1 −1
corroborates the methodology of time-delay cosmography.
Key words. cosmology: distance scale – gravitational lensing: strong – Galaxy: kinematics and dynamics – Galaxies: elliptical and lenticular, cD
– Galaxies: individual: RXJ1131−1231
1. Introduction To determine whether this “Hubble tension” is due to sys-
tematics or new physics, multiple independent methods to mea-
The Hubble constant, H0 , the current value of the Universe’s ex- sure H0 are needed (e.g., Verde et al. 2019; Di Valentino et al.
pansion rate, is a crucial cosmological parameter that also sets 2021; Freedman 2021). The Carnegie–Chicago Hubble Project
the extragalactic distance scale. Recently, tension has emerged uses the tip of the red giant branch (TRGB) to calibrate the
between early- and late-Universe estimates of H0 (e.g., Freed- SNe Ia absolute brightness and measures H0 = 69.6 ± 1.9 km
man 2021; Abdalla et al. 2022). The temperature and polarisa- s−1 Mpc−1 (Freedman et al. 2019, 2020). This TRGB-calibrated
tion fluctuations in the cosmic microwave background (CMB) measurement is statistically consistent with both the SH0ES
provide an estimate of the Hubble parameter at the last scatter- measurement and the CMB-based measurements. However, sev-
ing surface H(z ≈ 1100), which can be extrapolated to the cur- eral independent local probes strengthen the “H0 tension” by
rent epoch using the Λ cold dark matter (ΛCDM) cosmology. measuring values consistent with the SH0ES value. For exam-
The CMB measurements from Planck give H0 = 67.4 ± 0.5 km ple, the Megamaser Cosmology Project (MCP) estimates H0 =
s−1 Mpc−1 (Planck Collaboration 2020) and H0 = 67.6 ± 1.1 km 73.9 ± 3.0 km s−1 Mpc−1 (Pesce et al. 2020), the surface bright-
s−1 Mpc−1 (Aiola et al. 2020). In the local Universe, H0 can be ness fluctuation (SBF) method measures H0 = 73.7 ± 0.7 ± 2.4
estimated using the cosmic distance ladder, which uses luminos- km s−1 Mpc−1 (Blakeslee et al. 2021), and the Tully–Fisher-
ity distances of type Ia supernovae (SNe Ia) with their absolute relation-based method calibrated with Cepheids measures H0 =
brightness calibrated using different classes of stars. The Super- 75.1 ± 0.2 ± 0.3 km s−1 Mpc−1 (Kourkchi et al. 2020).
nova H0 for the Equation of State of the dark energy (SH0ES)
team uses Cepheids and parallax distances for this calibration, Strong-lensing time delays provide an independent measure-
and they find H0 = 73.04 ± 1.04 km s−1 Mpc−1 (Riess et al. ment of H0 (Refsdal 1964; for an up-to-date review, see Bir-
2022). This value is in 5σ tension with the Planck CMB-based rer et al. 2022b; Treu et al. 2022, for a historical perspective,
measurements. If this difference is not due to systematic errors see Treu & Marshall 2016). In strong lensing, a background
in either of these measurements (e.g., Efstathiou 2021), then this source appears as multiple images due to the gravitational de-
tension could point to new physics beyond the ΛCDM cosmo- flection of photons by a massive foreground galaxy or galaxy
logical model (e.g., Knox & Millea 2020). cluster. The photons that were emitted at the same time from
the background source arrive in different images with a rela-
?
NFHP Einstein Fellow tive time delay. This time delay carries cosmological informa-
Article number, page 1 of 21
This manuscript has been authored by Fermi Research Alliance, LLC under Contract No. DE-AC02-07CH11359 with the U.S. Department of Energy, Office of Science, Office of High Energy Physics.A&A proofs: manuscript no. ms
tion through a combination of angular diameter distances in- and non-time-delay lenses (Gomer et al. 2022). Such differ-
volved in the lensing system. This combination is referred to ences could arise, for example, from evolutionary effects, as the
as the “time-delay distance", which is inversely proportional to SLACS sample is at lower redshift than the TDCOSMO lenses
H0 (Refsdal 1964; Schneider et al. 1992; Suyu et al. 2010). The (see, e.g., Sonnenfeld et al. 2015, for a discussion of the evolu-
Time-Delay COSMOgraphy (TDCOSMO) collaboration has an- tion of mass density profiles of massive elliptical galaxies).
alyzed seven time-delay lenses to measure H0 with 2% error, Spatially resolved velocity dispersion measurements of lens
H0 = 74.2±1.6 km s−1 Mpc−1 assuming a power-law or compos- galaxies for systems with measured time delays are critical to
ite (i.e., stars and Navarro–Frenk–White (NFW) halo; Navarro drastically improving the H0 precision, given the limited sam-
et al. 1996, 1997) mass profile for the lensing galaxies (Mil- ple size of time-delay lenses (Shajib et al. 2018; Yıldırım et al.
lon et al. 2020b). The TDCOSMO collaboration encompasses 2021). The spatially resolved nature of the measured veloc-
the COSmological MOnitoring of GRAvItational Lenses (COS- ity dispersion is especially powerful in simultaneously break-
MOGRAIL; Courbin et al. 2005; Millon et al. 2020a), the H0 ing the MSD and the mass-anisotropy degeneracy (Cappellari
Lenses in COSMOGRAIL’s Wellspring (H0LiCOW; Suyu et al. 2008; Barnabè et al. 2009, 2012; Collett et al. 2018; Shajib et al.
2010, 2013; Bonvin et al. 2017; Birrer et al. 2019; Rusu et al. 2018). Spatially resolved velocity dispersion measurements for
2020; Wong et al. 2020), the Strong-lensing High Angular Reso- ∼40 time-delay lens galaxies will yield an independent .2%
lution Programme (SHARP; Chen et al. 2019), and the STRong- H0 measurement without any mass profile assumption (Birrer
lensing Insights into the Dark Energy Survey (STRIDES; Treu & Treu 2021). Additional constraints from velocity dispersion
et al. 2018; Shajib et al. 2020) collaborations. measurements of non-time-delay lens galaxies or magnification
The simple parametric lens models, e.g., the power law, information for standardizable lensed type Ia supernovae can
adopted in the TDCOSMO analyses are “industry standard” con- further improve the uncertainty to . 1% (Birrer & Treu 2021;
sistent with non-lensing measurements. The TDCOSMO collab- Birrer et al. 2022a).
oration has performed various systematic checks on the adopted In this paper, we measure the spatially resolved velocity dis-
lens modeling procedure. These checks find potential system- persion for the lens galaxy in the strongly lensed quasar system
atic biases to be lower than the acceptable limit (∼1%) from RXJ1131−1231using the Keck Cosmic Web Imager (KCWI) in-
the choice of mass model parametrization (i.e., power law or tegral field spectrograph on the W. M. Keck Observatory (Mor-
composite, Millon et al. 2020b), from ignoring dark substruc- rissey et al. 2012, 2018). and constrain H0 without any mass
tures in the lens galaxy’s halo (Gilman et al. 2020), from ig- profile assumption from this single time-delay lens system. This
noring disky or boxy-ness in the baryonic distribution (Van de is the first application of spatially resolved velocity dispersion
Vyvere et al. 2022a), from using different lens modeling soft- from a time-delay lens to measure H0 . This lens system was pre-
ware (Shajib et al. 2022a), and from ignoring potential isoden- viously used to measure H0 by combining the observed imaging
sity twists and ellipticity gradients in the lens galaxy (Van de data, single-aperture velocity dispersion, time delays, and anal-
Vyvere et al. 2022b). However, a significant source of potential ysis of the line-of-sight environment (Suyu et al. 2013, 2014).
systematics could arise due to the relatively simple parametriza- However, these previous studies assumed simple parametriza-
tion of the lens mass profile (Kochanek 2020). The well-known tions for the mass profile, such as a power law or a combination
mass-sheet degeneracy (MSD) does not allow one to constrain of the NFW profile and the stellar profile with constant mass-
the mass profile shape of the deflector galaxy from lens imaging to-light, which is the industry standard in modeling of galaxy-
observables alone (Falco et al. 1985; Schneider & Sluse 2013, scale lenses (Shajib et al. 2022b). Birrer et al. (2016) marginal-
2014). Non-lensing observables, such as the deflector galaxy’s ized over the MSD effect for the system RXJ1131−1231 to con-
velocity dispersion or the source’s unlensed intrinsic brightness, strain H0 using a single-aperture velocity dispersion measure-
are required to break the mass-sheet degeneracy and simultane- ment. Here, we allow the maximal freedom in the MSD by in-
ously constrain H0 and the mass profile shape (Treu & Koop- troducing one free parameter on top of the simply parametrized
mans 2002; Shajib et al. 2018; Yıldırım et al. 2020, 2021; Birrer mass profile constrained by lens modeling, which is completely
et al. 2020, 2022a). degenerate with H0 .
This paper is organized as follows. In Section 2, we describe
The TDCOSMO collaboration has redesigned the experi- the observational strategy and data reduction. In Section 3, we
ment to mitigate this systematic by relaxing the simple paramet- describe the procedures to extract the spatially resolved kine-
ric assumptions in the mass profile and constraining the profile matics map from the KCWI data. In Section 4, we briefly review
shape solely from stellar velocity dispersion measurements of the lensing and dynamical formalisms and how we combine the
the lensing galaxies (Birrer et al. 2020). Relaxing the assump- two to mitigate the MSD in our analysis. Then in Section 5, we
tion on the mass profile leads to an increase in the H0 uncer- describe our dynamical models and present results. We infer the
tainty from 2 to 8% – which is dominated by the uncertainty of cosmological parameters from our analysis in the Section 6. We
the measured velocity dispersion – giving H0 = 74.5+5.6
−6.1 km s
−1
discuss our results in Section 7 and conclude the paper in Sec-
Mpc−1 . One approach to improving the precision is to incorpo- tion 8.
rate prior information on the mass profile shape from the mea- We performed the cosmological inference blindly in this pa-
sured velocity dispersions of a larger sample of external lenses per. The measurement of velocity dispersion was not blinded.
without measured time delays. Assuming that the Sloan Lens However, we blinded the cosmological and other model parame-
ACS (SLACS) survey’s lens galaxies are drawn from the same ters directly related to cosmological parameters in the dynamical
population as the TDCOSMO lens galaxies and using their ve- modeling. Before unblinding, this analysis went through an in-
locity dispersions to constrain the mass profile shape, the un- ternal collaboration-wide review and code review. After all the
certainty on H0 improves to 5%, giving H0 = 67.4+4.1 −3.2 km s
−1
coauthors had agreed that the necessary systematic checks were
−1
Mpc (Birrer et al. 2020). Note that this estimate is statistically satisfactorily performed, we froze the analysis and unblinded on
consistent within 1σ with the larger 8% H0 measurement above. 5 January 2023. All the sections in this paper except for the final
However, the shift could also arise from systematic differences, discussion in Section 7 and summary in Section 8 were written
e.g., a difference between the parent populations of time-delay before unblinding. After unblinding, we only made minor edits
Article number, page 2 of 21A. J. Shajib et al.: H0 from spatially resolved kinematics of RXJ1131−1231
system while marginalizing the MSD with a prior on the source
size. These authors found the prior choice on the anisotropy in
the dynamical modeling to be the dominant systematic in infer-
ring H0 .
2.2. KCWI Spectroscopy
We obtained integral field unit (IFU) spectroscopy of
RXJ1131−1231 on 16 May and 7 June 2021 with the KCWI in-
S strument on the Keck Observatory (Morrissey et al. 2012, 2018).
B
D We chose KCWI with the small IFU slicer and the low-resolution
blue grating (BL) with a field-of-view (FoV) of 800. 4 × 2000. 4. The
A G spectral resolution is R ≈ 3600, corresponding to an instrumental
dispersion σinst ∼ 35 km s−1 . The reciprocal dispersion is 0.5 Å
C per pixel. The observed wavelength range 3600–5600 Å covers
the Ca H&K lines with wavelengths λλ3933, 3968 Å at the red-
shift of the lens galaxy (zd = 0.295). We primarily use these lines
N to determine the stellar velocity dispersion. The redshifted 4304
Å G-band is beyond the observed range, so it is not accessible
1" with the KCWI for the RXJ1131−1231 system.
E We aligned the FoV’s longer side with the North direction
(i.e., PA = 0◦ ) and dithered the individual exposures by 900 along
the North-South direction. As the extent of the RXJ1131−1231
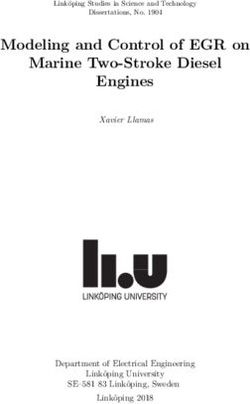
Fig. 1. HST/ACS image of RXJ1131−1231 in the F814W band. The
system is smaller than the FoV, each exposure contained the en-
four quasar images are labeled with A, B, C, and D. The central deflec- tire lens system within the FoV. In different exposures, the lens
tor is marked with G, of which we are measuring the spatially resolved system occupied the upper or lower portion of the FoV. Thus,
velocity dispersion. An arrow points to the nearby satellite S, which we the sky in an exposure with the system occupying the upper por-
mask out in the velocity dispersion measurement.. The North and East tion can be subtracted using another exposure with the system
directions and 1s̈cale are also illustrated. occupying the lower portion, and vice versa. We obtained six ex-
posures with a total integration time of 10,560 s on 16 May and
three with a total integration time of 5,400 s on 7 June. There-
for clarity and grammatical corrections in the previous sections fore, the total exposure time is texp = 15, 960 s. The airmass
and added the unblinded numbers where relevant in the abstract, ranged from 1.2 to 1.48 over the integrating period.
main text, and plots.
2.3. Data Reduction
2. Observations and data reduction We use the official Python-based data reduction pipeline1 (DRP)
In this section, we provide a brief description of the lens sys- to reduce our data. The DRP converts the 2D raw data captured
tem RXJ1131−1231 (Section 2.1), the spectroscopic observation on the detector into a 3D datacube. It performs geometry cor-
with KCWI (Section 2.2), and the data reduction procedure (Sec- rection, differential atmospheric refraction correction, and wave-
tion 2.3). length calibration and produces a final standard-star-calibrated
3D datacube for each exposure. The calibration with the stan-
dard star corrects for instrumental response and scales the data
2.1. Description of lens system to flux units (Morrissey et al. 2018). We use the final output file
with the suffix “_icubes” for further analysis.
The quadruply imaged quasar lens system RXJ1131−1231 was
We stack the dithered datacubes through drizzling (Fruchter
discovered by Sluse et al. (2003). The deflector in this system
& Hook 2002). Since the exposures are obtained on different
is an elliptical galaxy with redshift zd = 0.295, and the source
dates, the world coordinate system information is not accurate
redshift is zs = 0.657 (Sluse et al. 2003). Due to its low red-
enough to determine the relative positions of the dithered expo-
shifts, the system is relatively bright and large in angular size.
sures. We follow Chen et al. (2021b) to determine the relative po-
The Einstein ring in this system contains intricate features, pro-
sitions by simultaneously fitting the point spread function (PSF)
viding a wealth of information to constrain the lens mass model
to the four quasar image positions. To perform the drizzling on
(see Figure 1). Due to its early discovery and information-rich
the datacubes, we repurpose the drizzling routine of the DRP for
features, this system is one of the most studied lensed quasar
OSIRIS, another IFU spectrograph on the Keck Observatory2 .
systems. The time delays for this system were measured by
For the drizzling process, we set pixfrac = 0.7 as recom-
Tewes et al. (2013). Suyu et al. (2013, 2014) performed cosmo-
mended to reduce correlated uncertainties between the drizzled
graphic analyses of this system. These authors combined simply
pixels (Avila et al. 2015). We calculate the drizzled weight image
parametrized lens models based on the high-resolution imaging
and ensure that the ratio of RMS/median < 0.2 in the region of
from the HST’s Advanced Camera for Surveys (ACS) instru-
interest so that the trade-off is balanced between improving the
ment (HST-GO 9744; PI: Kochanek), the measured time delays,
single-aperture velocity dispersion, and external convergence es- 1
developed by Luca Rizzi, Don Neill, Max Brodheim; https://
timate to infer H0 = 80.0+4.5
−4.7 km s
−1
Mpc−1 . However, such sim- kcwi-drp.readthedocs.io/
ply parametrized lens models implicitly break the MSD. Birrer 2
https://github.com/Keck-DataReductionPipelines/
et al. (2016) performed an independent mass modeling of this OsirisDRP
Article number, page 3 of 21A&A proofs: manuscript no. ms
image resolution and increasing the background noise (Gonzaga to preserve the maximal spatial resolution and reduce the bias in
et al. 2012). The rectangular pixel size 000. 145700 × 000. 3395 of the the lower-S /N region (Cappellari & Copin 2003). We elaborate
KCWI is kept the same in the drizzled output. We transform the on these steps below.
datacube to have square pixels of size 000. 1457 × 000. 1457 through To estimate the lens galaxy’s S /N in each spaxel, we first si-
resampling while conserving the total flux. We converted the pix- multaneously fit the quasar and the lens galaxy in each spaxel to
els into square sizes for the convenience of Voronoi binning the calculate the signal from each of them. We perform this fitting
spectra using the software vorbin as described in Section 3.2. within the wavelength range 3400–4300 Å. As the four quasar
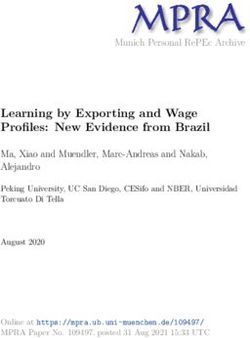
We directly estimate the PSF from the observed data. We images surround the lens galaxy, each spaxel receives a differ-
produce a 2D image from the datacube by summing along the ent contribution from the quasar light. We take spectra at the
wavelength axis (see Figure 2). We create a model for this KCWI central spaxel of image A as the quasar template, ignoring the
image using a high-resolution template from the HST imaging lens galaxy’s small contribution. Later in Section 3.3, we also
(Figure 1) that has a pixel size 000. 05 and PSF full width at half choose the quasar template from images B and C to account for
maximum (FWHM) 000. 10. In the model, the template is con- the associated systematic uncertainty, i.e., the potential impact
volved with a Gaussian PSF with a free FWHM parameter, and of chromatic microlensing that may change the contrast between
the positioning of the template on the KCWI image grid is fitted the line and the continuum (e.g., Sluse et al. 2007).
with two additional free parameters. By optimizing the model, We determine a single optimal template spectrum for the lens
we estimate that the PSF FWHM is 000. 96. galaxy template. For this purpose, we binned the spectra from
spaxels within a circular region of radius 000. 5 centered on the
lens galaxy and fit it with pPXF using the 628 stellar templates
3. Kinematics maps from the XSL and the quasar template. We also include a Leg-
This section describes our procedure to obtain the final kine- endre polynomial of degree 3 as a component in the fitting to ac-
matics map. We use the pPXF package3 to fit the spectra with count for any residual gradient in the continuum. pPXF chooses
a library of stellar templates and extract the velocity dispersion 39 of the stellar templates and builds the optimal template by
(Cappellari 2017, 2022). In Section 3.1, we describe the stel- taking a weighted linear combination of them. See Figure 3 for
lar templates used for the analysis. In Section 3.2, we present the weighted distribution of spectral types of the full template li-
the measurement of the spatially-resolved kinematics map of the brary and that of the 39 stars selected by pPXF. Among those
lens galaxy. In Section 3.3, we test the systematics of the velocity stars in the XSL with stellar classes specified by the Simbad
dispersion measurement. database (Wenger et al. 2000), G-type stars are selected with
the highest total weight, consistent with the fact that massive
elliptical galaxy spectra are dominated by G and K-type stars.
3.1. Library of Stellar Templates In the pPXF fitting procedure, the stellar templates are broad-
The popularly used template libraries Medium-resolution ened, corresponding to a freely varying velocity dispersion, but
Isaac Newton Telescope library of empirical spectra (MILES; the velocity dispersion does not broaden the quasar template.
Sánchez-Blázquez et al. 2006) and INDO-US templates (Valdes Once the optimal galaxy template is constructed, we use this
et al. 2004) are both too low resolution to fit our datasets. The template and the quasar template to fit the spectrum of each
KCWI’s instrumental resolution of R ≈ 3600 leads to σinst ∼ 35 spaxel individually. We use this optimal template to fit the galaxy
km s−1 for a Gaussian line spread function (LSF)4 . MILES spectra in individual spaxels instead of the full template library
has a resolution of σtemplate ∼ 64 km s−1 (i.e., R ∼ 2000), to avoid large spurious fluctuations in the measured velocity dis-
and the INDO-US templates have an approximately constant- persion from spaxel to spaxel. We show the decomposition of
the spectra from one example spaxel into different components
wavelength resolution of 1.2 Å, which corresponds to σtemplate =
after fitting with pPXF in Figure 2. We calculate the signal of the
39 km s−1 over the Ca H&K wavelength range. Therefore, we lens galaxy’s spectrum in each spaxel by subtracting the mod-
choose the X-shooter Spectral Library (XSL), which contains eled quasar component from the observed spectra. The noise is
628 stars covering three segments, including UVB, Vis, and NIR estimated by adding in quadrature the Poisson noise of the total
bands (Gonneau et al. 2020). As our data cover the rest-frame signal and the background noise estimated from an
blue/UV range, we only use the UVB segment to fit the data, √ empty patch
of the sky. The noise values are multiplied by 2 to account
where its resolution is R ∼ 9700 and σtemplate ∼ 13 km s−1 .
for the fact that the square pixels are created from the rectan-
gular pixels about double the size through resampling. We esti-
3.2. Measuring the velocity dispersion mate the S /N using the restframe wavelength range 3985–4085
Å, slightly above the Ca H&K absorption lines in wavelength
We choose a cutout centred on the lens system with 600. 235 ×
(see the purple shaded region in Figure 2).
600. 235 (43 pixels × 43 pixels) to initiate the analysis (see Fig-
To perform Voronoi binning before the velocity dispersion
ure 2). We estimate the lens galaxy light’s signal-to-noise ra-
measurement, we select the spaxels within a radius of 100. 55 from
tio (S /N) in each spatial pixel (hereafter, spaxel) within this ini-
the lens galaxy center that avoid the brightest spaxels contain-
tial cutout. We then select a region with sufficient S /N from the
ing images A, B, and C and the lensed arcs. We also exclude a
lens galaxy and relatively low quasar contamination for measur-
circular region around image D with radius 000. 5. To avoid any po-
ing the velocity dispersion (the yellow contour in Figure 2’s left
tential bias due to contamination from the satellite galaxy S, we
panel). We perform Voronoi binning within this selected region
exclude the spaxel at its position (∆RA = 000. 09, ∆Dec = 000. 54
3
https://pypi.org/project/ppxf/ from the galaxy center, Suyu et al. 2013). We also exclude pixels
4
We quantitatively verified that the shape of the instrumental LSF is with S /N < 1 Å−1 . In the end, the spaxels within the selected re-
Gaussian (cf. Figure 28 of Morrissey et al. 2018). Thus, the treatment of gion have S /N > 1.4 Å−1 (see Figure 2 for the selected region).
the instrumental LSF in pPXF is self-consistent and avoids any system-
atic bias due to inconsistent definitions of the LSF’s FWHM (Robertson 5
For reference, 100. 5 corresponds to 6.6 kpc at zd = 0.295 for a fiducial
2013). flat ΛCDM cosmology with H0 = 70 km s−1 Mpc−1 and Ωm = 0.3.
Article number, page 4 of 21A. J. Shajib et al.: H0 from spatially resolved kinematics of RXJ1131−1231
KCWI…data…of…RXJ1131
1231
1200
1000 0.05 Data
Flux…(arbitrary…unit)
800 Best…fit…model…(galaxy…+…quasar)
0.04 Best…fit…quasar…model
600
Data……quasar
400 0.03
Residual…(
= …data…
…model)
200 0.02
0.01
N
0
1" 0.00
E
3400 3600 3800 4000 4200
Restframe…wavelength…(Å)
Fig. 2. Left: 2D representation (median-collapsed) of the 3D KCWI datacube for RXJ1131−1231. The yellow contour traces the region with
100. 5 radial extent from the center selected for stellar kinematic measurement. A circular region with 000. 5 radius around image D and the spaxel
containing the satellite S are excluded from this selected region. All the individual spaxels within this region have continuum S /N > 1.4 Å−1 for
the lens galaxy’s light within 3985–4085 Å (the purple shaded range in the right panel). Right: The spectra (grey) from an example pixel (grey
box in the left panel) and the estimate of the signal from the lens galaxy’s spectra (orange) after removing the contribution from the quasar light
(blue). The full model of the spectra is presented with the red line, and the model’s residual is plotted in emerald color. The vertical purple shaded
region marks where we compute the continuum S /N.
3.3. Estimation of systematic uncertainty
All
To estimate the systematic uncertainties in the velocity disper-
Normalized…density
Set…1
1.5 sion measurement, we consider a range of plausible choices in
Set…2 the extraction procedure: the degrees of the additive Legendre
Set…3 polynomial used to correct the template continuum shape be-
1.0 tween 2 to 4; the quasar template obtained from images A, B, and
C; the fitted wavelength range chosen from 3300–4200 Å, 3350–
4250 Å, and 3400–4300 Å; and three sets of template spectra
0.5 used in the fitting. The first set of template spectra contains the
complete XSL of 628 stars. The second set contains half of the
entire sample that is randomly selected, and the third set con-
0.0 tains the other half. The numbers of stars selected by pPXF in
O B A F G K M L S C ~ the three sets are 39, 32, and 33, respectively. Sets 2 and 3 have
Stellar…type 15 and 17 stars, respectively, in common with Set 1. Figure 3
shows the distribution of spectral types in all three sets and the
Fig. 3. Distribution of the stellar spectral types in the XSL according entire library. We do not take the quasar template from image D
to the Simbad database. Unspecified stars are grouped in the ‘∼’ class. as it is much fainter than the other images, and thus the galaxy
The dark grey color represents the full library of 628 stars. Set 1 (or- contribution in the brightest spaxel on image D is non-negligible.
ange) refers to the 39 stars selected by pPXF out of the full library to Taking a combination of all of these choices yields 81 different
construct an optimal template 1. Set 2 (blue) refers to 32 stars selected
from a random half of the full library and set 3 (emerald) refers to 33
setups. We illustrate the shift in the extracted velocity dispersion
stars selected from the other half. Sets 2 and 3 have 15 and 17 stars, re- maps for one change of setting at a time in Figures 6 and 7.
spectively, in common with Set 1. The alternating light grey and white We estimate the variance-covariance matrix of the binned ve-
vertical regions divide the spectral classes for easier visualization. locity dispersions from these 81 setups. To do this, we generate
1,000 random realizations of the measured velocity dispersion
map for each of the 81 setups using the corresponding statistical
We perform Voronoi binning using vorbin6 given the estimated uncertainty. We create the variance-covariance matrix from the
S /N values for each spaxel. In Figure 4, we show the 41 Voronoi 81,000 realizations combined from all the setups. In this way,
bins obtained by setting the target S /N ≈ 23 Å−1 for each bin. the diagonal terms of the variance-covariance matrix encode
This target S /N was chosen so that the resultant S /N & 20 Å−1 the total variance from systematic and statistical uncertainties,
for each bin, which is standard practice (Figure 4, only bin 16 and the off-diagonal terms encode the systematic covariances.
has S /N ≈ 18 Å−1 ). For example, if all 81 setups hypothetically provided the same
For each Voronoi bin, we measure the velocity dispersion by velocity dispersion map and uncertainty, then the off-diagonal
fitting the binned spectra using pPXF using the optimal galaxy terms would be zero, and the diagonal terms would reflect only
template described above, the quasar template, and the additive the statistical uncertainties. We show the systematic variance-
Legendre polynomial to model any slight gradient in the popula- covariance relative to the statistical variance in Figure 8. The
tion. A few examples of pPXF fit of the binned spectra are shown systematic variance is subdominant relative to the statistical vari-
in Figure 5. ance (with a median of 0.47 of the ratio between systematic and
statistical covariances along the diagonal) except for bins 29 and
6
https://pypi.org/project/vorbin/ 31. These two bins are closest to quasar images A and C, and
Article number, page 5 of 21A&A proofs: manuscript no. ms
Map…of…
Voronoi…bins
30
40
28
39
37 36 38
26
34 35
33 28
32 24
S/N…(Å )
27 26
1
30
25 21 22
31
24 11 5 15
23 10
2
1
4
16
22
9 3 41
6
29 20
8
7 14 20
12 13
17 18
19
Voronoi…bins
18
16 Target…S/N
0 5 10 15 20 25 30 35 40
Bin…number
Fig. 4. Left: Voronoi binning of the selected spaxels within 100. 5 from the galaxy center that avoid lensed arcs, quasar images, and the satellite
galaxy S. The different colors illustrate the regions for each Voronoi bin in a cartographic manner for easier visualization, with the bin number
specified within each bin. We perform the binning with a target S /N ≈ 23 Å−1 for each bin, which results in 41 bins in total. Right: Resultant S /N
for each Voronoi bin (red points).
bin 1: σlos = 282 ± 7 km s−1 0.150 bin 6: σlos = 284 ± 11 km s−1
0.06
Flux (arbitrary unit)
Flux (arbitrary unit)
0.125
0.100
0.04
0.075
0.050
0.02
0.025
0.00 0.000
3400 3600 3800 4000 4200 3400 3600 3800 4000 4200
Restframe wavelength (Å) Restframe wavelength (Å)
bin 20: σlos = 274 ± 13 km s−1 1.0 bin 37: σlos = 263 ± 16 km s−1
0.3
Flux (arbitrary unit)
Flux (arbitrary unit)
0.8
Data
0.2 0.6
Best fit model (galaxy + quasar)
Best fit quasar model
0.4
0.1
0.2
0.0 0.0
3400 3600 3800 4000 4200 3400 3600 3800 4000 4200
Restframe wavelength (Å) Restframe wavelength (Å)
Fig. 5. pPXF fitting to the spectra from four examples of Voronoi bins. The bin number and the measured velocity dispersion for the corresponding
bin are specified in each panel. The grey line presents the full spectra, the red line traces the best-fit model, and the blue line shows the quasar
component in the best-fit model.
thus largely susceptible to the choice of quasar template (see velocity of 182 km s−1 using the pafit7 software program (Kra-
Figures 6 and 7.) jnović et al. 2006) and subtract it from the mean velocity map.
The systematic velocity is the result of a slight deviation in the
true redshift from the fiducial value. The mean velocity map does
We show the velocity dispersion and mean velocity maps av-
7
eraged over the 81 setups in Figure 9. We estimate a systematic https://pypi.org/project/pafit/
Article number, page 6 of 21A. J. Shajib et al.: H0 from spatially resolved kinematics of RXJ1131−1231
not show any significant evidence of ordered rotation above the 4.1.2. Description of the MST
systematic and statistical noise levels. Thus it is consistent with
the lens galaxy being a slow rotator. We use this systematic- The MST is a mathematical transform of the convergence pro-
averaged velocity dispersion map and the variance-covariance file that leaves invariant all the imaging observables, such as the
matrix estimated above when computing the likelihood function image positions and the flux ratios (Falco et al. 1985; Schneider
for dynamical modeling in Section 5. & Sluse 2014). This transform scales the convergence and the
To test the impact of our choice for the Voronoi binning unknown source position as
scheme, we adopt an alternative target S /N ≈ 28 Å−1 for each κ → κ0 = λMST κ + (1 − λMST ),
bin, which results in 27 bins. We similarly produce another (6)
set of 81 model setups in this binning scheme and produce ς → ς0 = λMST ς.
the variance-covariance matrix for these binned velocity disper- where λMST is the transformation parameter. The predicted time
sions. We test the systematic impact of this different binning delay ∆t scales under the transform as
scheme on the cosmological measurement later in Section 5.2.
We show the difference in the extracted kinematics between the ∆t → ∆t0 = λMST ∆t. (7)
two binning schemes in Figure 10.
Then, the inferred time-delay distance D∆t and the Hubble con-
stant H0 based on the observed time delays will change as
4. Overview of lens and dynamical modeling
D∆t
This section reviews the theoretical formalism of lens and dy- D0∆t = ,
namical modeling. λMST (8)
H00 = λMST H0 .
4.1. Lensing observables and modeling However, the MST changes the predicted velocity dispersion,
We briefly review the strong lensing formalism in the context thus measuring it breaks the MSD. Notably, the MST also
of time-delay cosmography in Section 4.1.1, describe the mass- rescales the lensing magnifications. Thus, standardizable candles
sheet transform (MST) in Section 4.1.2, and explain the internal can also be used to break the MSD (Bertin & Lombardi 2006;
and external components of the MST in Section 4.1.3. Birrer et al. 2022a) provided that microlensing and millilensing
can be mitigated (e.g., Yahalomi et al. 2017; More et al. 2017;
Foxley-Marrable et al. 2018).
4.1.1. Strong lensing formalism
In the thin lens approximation applicable in this case, lensing 4.1.3. Internal and external MST
observables are described using the surface mass density Σ(R)
projected from the 3D mass density distribution ρ(r) in the lens We can express the “true” (i.e., physically present) lensing mass
galaxy. Formally, the lensing observables depend on the dimen- distribution as
sionless convergence defined as κtrue = κgal + κext , (9)
Σ(θ)
κ(θ) ≡ , (1) where κgal is the mass distribution of the central lens galaxy
Σcr
(or galaxies) that is (are) considered in the lens modeling, and
which is the surface mass density normalized by the critical den- κext is called the external convergence, which approximates the
sity projected mass distribution of line-of-sight structures as a mass
sheet. Since limθ→∞ κgal = 0 has to be satisfied, we find that
c2 Ds limθ→∞ κtrue = κext , hence the interpretation of κext as the lensing
Σcr ≡ . (2)
4πGDd Dds mass far from (or, “external” to) the central deflector(s).
Here, c is the speed of light, G is the gravitational constant, Ds All the lensing observables including imaging observables
is the angular diameter distance between the observer and the result from κtrue . However, since only the central galaxies are
source, Dd is the angular diameter distance between the observer usually considered in lens modeling with imaging observables,
and the lens galaxy, and Dds is the angular diameter distance the lens model provides κmodel0
with limθ→∞ κmodel
0
= 0. This
between the lens galaxy and the source. The on-sky deflection κmodel is an MST of κtrue for λMST = 1/(1 − κext ) as
0
angle α(θ) relates to the convergence as κgal + κext 1 κgal
κmodel
0
= +1− = . (10)
1
κ(θ) = ∇ · α(θ). (3) 1 − κext 1 + κext 1 − κext
2
Lens mass models are usually described with simply
The time delay between two quasar images labeled A and B is parametrized models, such as the power law or a combi-
given by nation of the NFW profile and the observed stellar distribution.
D∆t (θA − ς)2 (θB − ς)2
" # In that case, the assumption of a simple parametric form
∆tAB = − − ψ(θA ) + ψ(θB ) , (4) implicitly breaks the MSD. Therefore, the simply parametrized
c 2 2 model κmodel can be expressed as another approximate MST of
where θA is the angular position of image A, ς is the source’s the κmodel
0
as
angular position, ψ(θ) is the lensing potential, and the time-delay
distance D∆t is defined as κmodel
0
≈ λint κmodel + (1 − λint )κs (θ), (11)
Dd Ds where λint is called the internal MST parameter, and κs is a “vari-
D∆t ≡ (1 + zd ) . (5) able” mass sheet with limθ→∞ κs (θ) = 0 to ensure that both
Dds
Article number, page 7 of 21A&A proofs: manuscript no. ms
Range:…33504250…Å Range:…33004200…Å Polynomial…degree…2 Polynomial…degree…4
20 20 20 20
0 0 0 0
20 20 20 20
Stellar…template…set…2 Stellar…template…set…3 Quasar…B Quasar…C
20 20 20 20
0 0 0 0
20 20 20 20
Fig. 6. Absolute difference in km s−1 between the extracted velocity dispersion from two setups that differ by one setting. The baseline setup has
the range: 3400–4300 Å, polynomial degree: 3, stellar template set 1, and quasar template from image A. The different setting for each case is
specified at the top of each panel.
Range:…33504250…Å Range:…33004200…Å Polynomial…degree…2 Polynomial…degree…4
2 2 2 2
0 0 0 0
2 2 2 2
Stellar…template…set…2 Stellar…template…set…3 Quasar…B Quasar…C
2 2 2 2
0 0 0 0
2 2 2 2
Fig. 7. Same as Figure 6, but the difference is normalized by the statistical uncertainty of the baseline setup.
limθ→∞ κmodel
0
= 0 and limθ→∞ κmodel = 0 are satisfied. How- where θs
θE is a scale radius where the variable mass-sheet
ever, for Equation (11) to be an approximate MST, the variable smoothly transitions from 1 − λint to 0. This approximate MST
mass-sheet needs to satisfy κs (θ) ' 1 within the central region converges to the pure MST in the limit θs → ∞. Thus, the actual
that lensing observables are sensitive to (θ . 2θE , Schneider & mass distribution of the central deflector(s) relates to the mod-
Sluse 2013). This can be achieved with the formulation (Blum eled mass distribution as
et al. 2020)
κgal ≈ (1 − κext ) [λint κmodel + (1 − λint )κs (θ)] . (13)
θs2 The external convergence κext can be estimated by using rel-
κs (θ) = , (12) ative number counts of line-of-sight galaxies near the central de-
θ2 + θs2
Article number, page 8 of 21A. J. Shajib et al.: H0 from spatially resolved kinematics of RXJ1131−1231
h i
2 1
los /
diag( )
los …(km…s)
xy stat xy
Fractional…systematic…covariance:…2 los
stat, x
20 2
5
0
10
10 0 0
15
Bin…number
20 2
20
0
Fig. 10. Absolute (left) and uncertainty-normalized (right) difference in
25 the extracted velocity dispersion between two Voronoi binning schemes.
The two binning schemes are obtained by setting the target S /N to 23
Å−1 and 28 Å−1 for each bin. We take the case with target S /N ≈ 23 Å−1
30 for each bin as the baseline in our analysis.
0
35 10
flector(s) (e.g., Suyu et al. 2010; Greene et al. 2013; Rusu et al.
40 2017; Buckley-Geer et al. 2020), or by using weak lensing of
10 20 30 40 distant galaxies by the line-of-sight mass distribution (e.g., Ti-
Bin…number hhonova et al. 2018). The measured velocity dispersion then
constrains the internal MST parameter λint (Birrer et al. 2020;
Fig. 8. Illustration of the systematic covariance relative to the statistical Yıldırım et al. 2021).
covariance. Σ is the variance-covariance matrix of the Voronoi-binned
velocity dispersions (with target S /N ≈ 23 Å−1 for each bin), σstat,x is
the statistical uncertainty in bin number x from our fiducial setup, and 4.2. Dynamical modeling
diag(σstat ) is a diagonal matrix. Note that we assume no covariance in
the statistical uncertainty from each setup for kinematic measurement. In this section, we describe the Jeans anisotropic multi-
Thus the off-diagonal terms in the variance-covariance matrix purely Gaussian-expansion (JAM) framework to model our dynamical
represent the systematic covariance. Most diagonal terms are < 1 (with
a median of 0.47), showing that the systematic variances are subdom-
observable, which is the spatially resolved stellar velocity dis-
inant to the statistical variances except for bins 29 and 31. These bins persion measured in Section 3. The orbital motions of the stars,
are close to images A and C. Thus, they are largely susceptible to the i.e., the distribution function f (x, v) of position x and velocity v,
choice of the quasar template, as seen in Figures 6 and 7. in the galactic potential Φ is described by the steady-state col-
lisionless Boltzmann equation (Binney & Tremaine 1987, Eq.
Velocity…dispersion Velocity…dispersion…uncertainty 4-13b)
300
…(km…s
los …(km…s
3
)
)
∂f ∂Φ ∂ f
!
1
1
X
275 40 vi − = 0. (14)
i=1
∂xi ∂xi ∂vi
250
los
20 We assume an axisymmetric case (i.e., ∂Φ/∂φ = ∂ f /∂φ = 0
225 with φ being the polar angle in the spherical coordinate sys-
tem), a spherically aligned velocity ellipsoid, and the anisotropy
for each Gaussian component in the multi-Gaussian expan-
Mean…velocity Mean…velocity…uncertainty sion (MGE; Emsellem et al. 1994; Cappellari 2002) to be spa-
50 tially constant. Slow rotators such as the deflector galaxy in
vmean …(km…s
vmean …(km…s
)
)
RXJ1131−1231 are in general expected to be weakly triaxial or
1
1
30 oblate but never flat and instead quite close to spherical in their
0 central parts (e.g., Cappellari 2016). For this reason, we expect
the spherical alignment of the velocity ellipsoid of jamsph (Cap-
pellari 2020) to provide a better approximation to the galaxy dy-
20
50 namics than the cylindrical alignment jamcyl solution (Cappellari
2008). Then, the above equation gives two Jeans equations in
Fig. 9. Maps of extracted velocity dispersion (top row) and mean ve- spherical coordinates (Jeans 1922; Bacon et al. 1983; de Zeeuw
locity (bottom row) in Voronoi bins along with the corresponding un- et al. 1996; Cappellari 2020)
certainties (right column). The Voronoi binning was tuned to achieve
S /N ≈ 23 Å−1 for each bin. The illustrated maps (left column) corre-
spond to the average values after combining 81 model setups, and the ∂ ζhv2r i (1 + β)ζhv2r i − ζhv2φ i ∂Φ
uncertainty maps correspond to the square root of the diagonal of the + = −ζ ,
variance-covariance matrices. A systematic velocity of 182 km s−1 was ∂r r ∂r (15)
subtracted from the mean velocity map. ∂ ζhv2r i (1 − β)ζhv2r i − ζhv2φ i ∂Φ
(1 − β) + = −ζ ,
∂θ tan θ ∂θ
Article number, page 9 of 21A&A proofs: manuscript no. ms
where the following notations are used software program mgefit9 . jampy deprojects the MGE compo-
Z nents into an oblate or prolate spheroid with an inclination angle
ζhv p vq i ≡ v p vq f d3 v, i (Cappellari 2002). The deprojected 3D mass density provides
the 3D potential Φ for the kinematic computation. We also take
(16) the MGE of the surface brightness I(x, y) for deprojection to 3D
hv2 i
β ≡ 1 − θ2 . with the inclination angle i for the kinematic computation by
hvr i jampy.
Here, β is the anisotropy parameter, and the velocity dispersion The combination of lens imaging observables and the stellar
ellipsoid is assumed to be spherically aligned, giving hvr vθ i = 0. kinematics is sensitive to λint (1 − κext )Ds /Dds (Birrer et al. 2016;
The line-of-sight second moment hv2los i is the integral given Chen et al. 2021a). We apply a prior on κext using the estimated
by κext distribution from Suyu et al. (2014) to help break the de-
generacy in distributing the total MSD into external and internal
Z ∞ components.
S hv2los i(x, y) = dz ζhv2z i. (17)
−∞
4.4. Bayesian framework
where S (x, y) is the surface density of the dynamical tracer.
Given that there is no evidence of significant ordered rotation According to Bayes’ theorem, the posterior of the model param-
and the only significantly nonzero velocities are likely due to eters Ξ = {ξmass , ξlight , Dmodel
∆t , i, κext , λint , Dd , β} as
systematic errors (see Figure 9), we assume hvlos i = 0 and define
hv2los i = σ2los . The observed line-of-sight velocity dispersion is p(Ξ | D) ∝ p(D | Ξ) p(Ξ), (21)
given a luminosity-weighted integral as
where p(D | Ξ) is the likelihood given data D and p(Ξ) is the
R
dxdy Ihv2los i ⊗ PSF prior. In this study, the data D is the measured velocity disper-
h i h i ap sions in Voronoi bins (Figure 9). The observational information
σlos
2
= hvlos i
2
= R , (18)
obs obs dxdy I ⊗ PSF from the published time delays, lens models using HST imag-
ap
ing, and the line-of-sight effects (Tewes et al. 2013; Suyu et al.
where the symbol “⊗ PSF” denotes a convolution with the PSF. 2013, 2014) is incorporated by adopting those previous posteri-
In the equation above, we have chosen the surface brightness ors as the prior on our model parameters. The likelihood of the
profile I(x, y) as a substitute for the surface density S (x, y) of observed velocity dispersion vector σlos ≡ [σ1 , . . . , σNbin ], with
the dynamical tracer since the constant factor between surface Nbin being the number of Voronoi bins, is given by
brightness and surface number density cancels out in this ex- " #
pression. 1 T −1
L(σlos | Ξ) ∝ exp − σlos Σ σlos , (22)
We use the dynamical modeling software jampy8 to compute 2
the observed velocity dispersion by solving the Jeans equation
from Equation (15) for a given 3D potential Φ(r) and anisotropy where Σ is the variance-covariance matrix. Specific priors used
profile β(r). Specifically, we use the jam_axi_proj() routine in this Bayesian framework are given in Section 5. We ob-
with the keyword align=‘sph’. See Cappellari (2008, 2020) tain the posterior probability distribution function (PDF) of
for a detailed formalism in computing Equation (18) by jampy. the model parameters using the Markov-chain Monte Carlo
(MCMC) method using the affine-invariant ensemble sampler
emcee (Goodman & Weare 2010; Foreman-Mackey et al. 2013).
4.3. Cosmological inference from combining dynamical and We ensure the MCMC chains’ convergence by running the
lensing observables chains for &20 times the autocorrelation length after the chains
have stabilized (Foreman-Mackey et al. 2013).
We parametrize the 3D potential Φ(r) using the lens model pa-
rameters ξmass and the internal MST parameter λint to conve-
niently use the lens model posterior from Suyu et al. (2013) as a 5. Dynamical models
mass model prior in the dynamical modeling. Thus from Equa-
tion (13), the surface mass density for our dynamical model is We first describe our baseline dynamical model in Section 5.1
given by and then perform various checks on systematics in Section 5.2.
Σ(θ) = Σcr (1 − κext ) [λint κmodel (θ) + (1 − λint )κs (θ)] . (19)
5.1. Baseline dynamical model
We include D∆t and Dd as free parameters in our model, which This subsection describes the baseline settings in our dynamical
give the critical density Σcr as model, namely the specific parametrization of the mass model
(Section 5.1.1), the dynamical tracer profile (Section 5.1.2), the
c2 D∆t c2 Dmodel
∆t probability of oblate or prolate axisymmetry (Section 5.1.3), the
Σcr = = , (20)
4πG (1 + zd )D2d 4πG (1 + zd )(1 − κext )λint D2d inclination angle (Section 5.1.4), and the choice of anisotropy
profile (Section 5.1.5).
where Dmodel
∆t is the time-delay distance predicted by the lens
mass model κmodel (θ) for the time delays observed by Tewes et al.
5.1.1. Parametrization of the mass model
(2013).
We approximate the surface mass density Σ(θ) with an MGE We adopt the power-law mass model as our baseline model. In
(Emsellem et al. 1994; Cappellari 2002; Shajib 2019) using the this model, the mass profile is defined with Einstein radius θE ,
8 9
https://pypi.org/project/jampy/ https://pypi.org/project/mgefit/
Article number, page 10 of 21A. J. Shajib et al.: H0 from spatially resolved kinematics of RXJ1131−1231
logarithmic slope γ, projected axis ratio qm , and position angle Table 1. Values of the light model parameters for the double Sérsic
ϕmass . The convergence profile κmodel in Equation (19) for the model in our fitting of a large cutout and those from Suyu et al. (2013).
The position angle ϕlight is defined as East of North.
power-law model is given by
γ−1 Parameter This analysis Suyu et al. (2013)
3 − γ θE
pl Sérsic profile 1
κmodel (θ1 , θ2 ) =
q (23)
2 I0 (e−1 s−1 pixel−1 ) 32.8 ±0.1 36.4 ±0.4
qm θ12 + θ22 /qm
θeff ( )
00
2.437 ±0.005 2.49 ±0.01
Here, the coordinates (θ1 , θ2 ) are rotated by ϕmass from the (RA, ns 1.10 ±0.01 0.93 ±0.03
Dec) coordinate system. We adopt the lens model posterior from ql 0.865 ±0.001 0.878 ±0.004
Suyu et al. (2013) as a prior in our dynamical model. For sim- Sérsic profile 2
plicity, we set the position angle ϕmass the same as the observed I0 (e−1 s−1 pixel−1 ) 441 ±7 356 ±12
position angle of light ϕlight . We use the estimated κext distribu-
θeff (00 ) 0.300 ±0.003 0.362 ±0.009
tion for the power-law model as the prior (see Figure 3 of Suyu
et al. 2014). ns 1.60 ±0.02 1.59 ±0.03
We set θs = 1200 (' 7.5θE ) in the approximate mass-sheet κs ql 0.847 ±0.002 0.849 ±0.004
(Equation 12) so that the imaging constraints alone cannot dif- ϕlight (◦ ) 120.5 ±0.3 121.6 ±0.5
ferentiate the power-law mass profile and its approximate MST
from Equation (11). We obtain this lower limit by running the
jupyter notebook that produces Figure 3 of (Birrer et al. 2020).10 Following Suyu et al. (2013), we use the double Sérsic model to
However, we adjusted the fiducial lens model parameters in the fit the light profile, which is a superposition of two concentric
notebook to match with those for RXJ1131−1231. We take a uni- Sérsic profiles. The Sérsic profile is defined as
form prior for the internal MST parameter λint ∼ U(0.5, 1.13). 1/n
q θ2 + θ2 /q s
q
The upper limit of 1.13 is set by the requirement that the trans-
l 1
2 l
formed mass profile under the approximate MST must be mono- I(θ1 , θ2 ) = I0 exp −bn
+ bn ,
(24)
θ
tonic so that the MGE can approximate the transformed pro-
eff
file sufficiently well (Shajib et al. 2019). Previous studies also
found similar or more restrictive upper limits for λint to satisfy where I0 the amplitude, ql is the axis ratio, θeff is the effective
the physical requirement of non-negative density (Birrer et al. radius, n s is the Sérsic index, and bn = 1.999n − 0.327 is a nor-
2020; Yıldırım et al. 2021). malizing factor so that θeff becomes the half-light radius (Sérsic
The appropriate number of MGE components for the mass 1968). The coordinates (θ1 , θ2 ) are rotated by ϕlight from the (Ra,
or light profile is automatically chosen by jampy with a maxi- Dec) coordinate system.
mum of 20 components. We check that the MGE approximates We first mask circular regions at the quasar image positions
the input mass or light profile very well (with a maximum 1% due to slightly saturated pixels producing significant residuals in
deviation at < 1000 and maximum 10% deviation between 1000 – the subtracted cutout (see Figure 11). We then iteratively mask
5000 ). These deviations from the density profile have an oscilla- the other pixels with significant residuals above statistical expec-
tory pattern due to the MGE approximation’s nature, except near tations to effectively perform an outlier rejection while preserv-
the end of the fitted ranges. Thus the deviation in the integrated ing the shape of a Gaussian tail. For each iteration of this pro-
mass profile often averages out in the line-of-sight integration up cess, we take a discrepancy threshold, which we decrease from
to a very large radius. We perform the MGE fitting up to 10000 . 5σ to 2σ with step size 0.5σ across these iterations. We then
Thus, the large mismatch between the MGE approximation and randomly mask a subset of the pixels with residuals more than
the original profile occurs largely outside the integration limit the discrepancy level at the given iteration such that the number
∼ 7000 . The chosen number of maximum Gaussian components of remaining pixels with such high residuals is statistically ex-
is not a dominant source of numerical error. Setting this maxi- pected. The final masked area after the iterations is illustrated in
mum number to a very high value, such as 100, shifts the com- Figure 11. We tabulate the best-fit light model parameters in Ta-
puted velocity dispersion by only < 0.5% within the observed ble 1 and compare them with those from Suyu et al. (2013). The
region, which is insignificant compared to the 1% numerical sta- circularized half-light radius for our best-fit model is θeff = 100. 91,
bility targeted by jampy. which is slightly larger than the value θeff = 100. 85 from Suyu
et al. (2013) based on the same imaging data but from a smaller
5.1.2. Dynamical tracer profile cutout (illustrated in 11). We then take the MGE of the fitted
double Sérsic profile as the light distribution I(x, y) in our dy-
We update the light profile fitting for the lens galaxy from Suyu namical modeling. We propagate the uncertainties and covari-
et al. (2013) using a larger HST image cutout than that therein, ances from the light profile fitting into the dynamical modeling.
which did not contain the full extent of the lens galaxy’s light To do that, we sample from the multivariate normal distribution
profile (see Figure 11). The lensed arcs and quasar images are corresponding to all the light model parameters for each call of
first subtracted from the cutout using the prediction of the best- the likelihood function within the MCMC process and then take
fit lens model from Suyu et al. (2013). We use the software pack- the MGE of the light profile given the sampled parameters.
age lenstronomy11 to fit the residual light distribution attributed
to the lens galaxy (Birrer & Amara 2018; Birrer et al. 2021).
5.1.3. Oblate or prolate shape of the axisymmetry
10
https://github.com/TDCOSMO/hierarchy_analysis_2020_
public/blob/6c293af582c398a5c9de60a51cb0c44432a3c598/ The oblateness, prolateness, or triaxiality of a slow rotator
MST_impact/MST_pl_cored.ipynb galaxy can, in principle, be constrained from the kinematic mis-
11
https://github.com/lenstronomy/lenstronomy alignment angle ∆ϕkin ≡ ϕkin − ϕlight . However, we do not
Article number, page 11 of 21You can also read