Position Location for Futuristic Cellular Communications - 5G and Beyond - 5G ...
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

O. Kanhere and T. S. Rappaport, “Position Location for Futuristic Cellular Communications - 5G and
Beyond,” in IEEE Communications Magazine, vol. 59, no. 1, pp. 70-75, January 2021.
Position Location for Futuristic Cellular
Communications - 5G and Beyond
Ojas Kanhere and Theodore S. Rappaport
NYU WIRELESS
NYU Tandon School of Engineering
Brooklyn, NY 11201
{ojask, tsr}@nyu.edu
of geo-tagged Wi-Fi hotspots have been used by
arXiv:2102.12074v1 [cs.IT] 24 Feb 2021
Abstract—With vast mmWave spectrum and narrow
beam antenna technology, precise position location is companies such as Apple and Google. The UE
now possible in 5G and future mobile communication may be localized using the known positions of all
systems. In this article, we describe how centimeter- Wi-Fi hotspots that the UE can hear, where the
level localization accuracy can be achieved, particularly
through the use of map-based techniques. We show how UE position estimate is formed from the weighted
data fusion of parallel information streams, machine average of the received signal strengths, providing
learning, and cooperative localization techniques further an accuracy of tens of meters. Although FCC
improve positioning accuracy. requirements specify a horizontal localization error
of less than 50 m for 80 percent of enhanced
I. I NTRODUCTION 911 (E911) callers, a localization error less than
Precise position location (also called position- 3 m will be required for positioning applications
ing or localization) is a key application for the of the future. Additionally, FCC requires a vertical
fifth generation (5G) of mobile communications localization error less than 3 m for 80 percent of
and beyond, wherein the position of objects is E911 callers by April 2021, to identify the caller’s
determined to within centimeters. With the rapid floor level, which is achievable using barometric
adoption of Internet of Things (IoT) devices, a pressure sensors present in modern cell phones (see
variety of new applications that require centimeter- FCC’s Fifth Report and Order PS Docket 07-114.).
level precise positioning shall emerge, such as In addition to infrastructure-based positioning
automated factories that require precise knowledge systems, other sensor-based technologies such as
of machinery and product locations to within cen- vision-based localization using cameras (commonly
timeters. Geofencing is the creation of a virtual utilized by drones [1]) can provide accurate posi-
geographic boundary surrounding a region of in- tioning capabilities when fused with inertial sen-
terest to monitor people, objects, or vehicles, and sors. However, in low-visibility environments, lo-
by using sensors on a moving object, the location calization systems at cellular frequencies work bet-
of the object may be continually and adaptively ter since they are not blocked when visibility is
“geofenced” to trigger a software notification im- hampered. Ultrasound indoor positioning systems
mediately when the object enters or leaves the such as Forkbeard are able to achieve a preci-
virtual geographic boundary. Position location to sion level of 10 cm within an office environment.
within 1-2 m will enable accurate geofencing, such Autonomous vehicles utilize light detection and
that users entering/leaving a room or equipment and ranging (LIDAR) to estimate the relative distances
people may be tracked in hospitals, factories, within to other vehicles with sub-millimeter accuracy [2],
and outside buildings. while factory-based systems using infrared have
Today’s fourth generation (4G) cellular networks shown good accuracy [3].
rely on LTE signaling and the global positioning Position location solutions are being developed
system (GPS) (which is accurate to within 5 m). using other media such as ultra wideband (UWB),
However, in indoor obstructed environments, or in RFID, visible light, and Bluetooth. UWB signals, in
underground parking areas and urban canyons, GPS the 3.1-10.6 GHz band, have a bandwidth of more
signals are attenuated and reflected such that user than 500 MHz. Rapid strides in utilizing UWB
equipment (UE) cannot be accurately localized. for localization are expected, with the iPhone 11
To further refine the positioning capabilities of currently carrying UWB chips that are typically
GPS indoors and in urban canyons, SnapTrack capable of achieving a ranging accuracy on the
“wireless assisted GPS” (WAG) improved the sen- order of centimeters [4].
sitivity of GPS receivers. Additionally, databases The advent of millimeter-wave (mmWave) com-munications enables a paradigm shift in localization
capabilities by allowing joint communication and
position location, utilizing the same infrastructure.
As shown in this article, the massive bandwidths,
coupled with the high gain directional, steerable
multiple-input multiple-output (MIMO) antennas Δ = 2 − 1
hyperbola
at mmWave frequencies, enable unprecedented lo- circle
calization accuracy in smartphones of the future.
We demonstrate how the utilization of cooperative BS 2
BS 1
(x1,y1)
(x2,y2)
localization, machine learning, user tracking, and d2 ,2
d1 1,3
multipath enables precise centimeter-level position
location. d3
Δ 1 − 3
UE
(x,y) BS 3
II. F UNDAMENTAL L OCALIZATION (x3,y3)
T ECHNIQUES
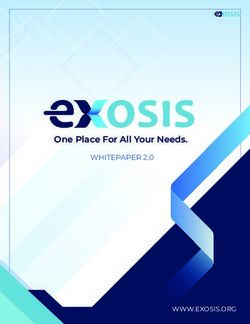
Fig. 1. The UE may be localized based on ToA (black circles),
Today’s localization solutions primarily focus on TDoA (red hyperbola), or AoA (black dotted lines) localization
geometric localization with augmented assistance, techniques [5].
wherein the position of the base station (BS) is
known and the UE location is determined based on
geometric constraints such as the BS-UE distances The short wavelength in the mmWave frequency
and physical angular orientations between BS and band allows electrically large (but physically small)
UE. antenna arrays to be deployed at both the UE and
In angle of arrival (AoA) localization technique, BS. MmWave BS antenna arrays with 256 antenna
the UE estimates the angle of the strongest re- elements and 32-element mobile antenna arrays
ceived signal. AoA positioning was conceived for are already commercially available. The frequency-
E911 in the early days of cellular [5]. In time independent half-power beamwidth (HPBW) of a
of arrival (ToA) (or time difference of arrival, uniform rectangular array (URA) antenna with
TDoA) localization techniques, the UE estimates half-wavelength element spacing is approximately
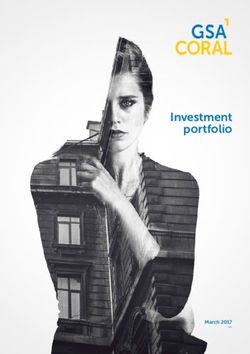
the distance (or difference in distance) from the (102/N)°, where N is the number of antenna ele-
BS by estimating travel time (or differences in ments in each linear dimension of the planar array
travel time) of the reference signal from the BS. [8], as seen in Fig. 2.
The UE may then be localized to the point where Narrower HPBWs of antenna arrays allow the
the circles (or hyperbolas) corresponding to the AoA of received signals to be estimated precisely,
BS-UE distances intersect. A spatial resolution of and further signal processing provides better accu-
up to 2.44 m and 4.88 m is achievable with 5G racy. For example, the sum-and-difference for an
New Radio (NR) waveforms for ToA and TDoA infrared system technique achieved sub-degree an-
measurements, respectively [6]. In addition to uti- gular resolution with two overlapping and slightly
lizing GPS for UE localization, 4G (and future 5G) offset antenna arrays [3], showing it is possible to
networks implement TDoA localization and utilize very accurately detect precise AoA at UEs or BSs.
the barometric pressure sensors in UE for altitude Although mmWave frequencies suffer from
estimation [1]. The operation of AoA, ToA, and higher path loss in the first meter of propagation
TDoA localization techniques is illustrated in Fig. and experience greater blockage losses compared
1 and is well understood. to lower frequencies, the greater gain provided
by the directional antennas coupled with smaller
A. Accurate Localization in 5G Networks with Di- serving cells (100-200 m radius) compensates for
rectional Antenna Arrays and Wide Bandwidths the additional path loss. Indeed, recent research [9]
In the 5G era, it is now possible to achieve very demonstrates the feasibility of using mmWave for
accurate localization performance with highly di- outdoor localization.
rectional antenna arrays having narrow beamwidths Utilization of mmWave frequency bands will
and wide bandwidths [7]. The frequency range (FR) enable unprecedented positioning accuracy due to
2 of 5G NR covers mmWave frequencies ranging the ultra-wide bandwidths available, since the larger
from 24.25 GHz to 52.6 GHz. Additionally, the bandwidths allow finer time resolution of multipath
IEEE 802.11 ad standard supports the use of the signals transmitted from the BS to the UE, on the
60 GHz mmWave band indoors, from 57 GHz to order of a nanosecond, where a 1 ns time resolution
71 GHz. implies a spatial resolution of 30 cm before addi-more than 5° when the UE was moved by 5 cm, the
signal was assumed to correspond to an NLoS path
and thus discarded from use in estimating position.
By suppressing NLoS multipath and only using the
LoS path, a median localization accuracy of 23 cm
was achieved with six 2.4 GHz WiFi access points
[11].
Estimating the BS-UE distance, a critical step
for ToA localization, may additionally be utilized to
determine whether the BS-UE link is in NLoS. The
running variance of the BS-UE distance estimates
Fig. 2. The normalized antenna gain (with respect to boresight -
the axis of maximum gain) of URAs with 8×8, 16×16, 32×32, and (σ 2 ) in NLoS is greater than LoS; hence, NLoS BS-
64×64 array elements. Note the half power beamwidths (HPBWs) UE links may be identified based on the running
are 12.76°, 6.34°, 3.17°, and 1.55° respectively. variance observed in real time. The UE can accu-
rately be assumed to be in NLoS (and the UE-BS
link is not used for localization) when σ 2 is greater
tional processing that can further improve accuracy. than a calibrated threshold γ [12]. The variance
of distance estimates is greater for a mobile user
B. Performance of Fundamental Localization Tech- than for a stationary user due to the change in the
niques in Dense Multipath Environments true BS-UE distance when the UE is in motion. To
ToA, TDoA, and AoA localization techniques account for user motion, γ must be increased, and
were designed for line-of-sight (LoS) propagation. in [12], a constant proportional to the square of the
In indoor/outdoor non-line-of-sight (NLoS) envi- velocity of the user was added to γ to account for
ronments however, multipath arrives at different an- user motion.
gles with larger delays, yielding positioning error.
Without using any advanced correction techniques, Channel features such as maximum received
a poor mean error of 10 m was observed with well- power, root mean square (RMS) delay spread,
known AoA localization based on NLoS indoor Rician-K factor, and the angular spread of depar-
office measurements [10]. Similar enormous mean ture/arrival may be utilized to determine whether
errors of 8-10 m inside buildings were observed the UE is in NLoS [13]. NLoS channels typically
in NLoS when the localization performance was have lower maximum received power over the
tested using traditional methods from outdoor E- power delay profile (PDP) due to the presence of
911 [5] via simulations in NYURay, a 3D mmWave obstructions and reflectors. The delay spread of
ray tracer [7]. The poor localization accuracy of multipath components is higher in NLoS environ-
known approaches, in the face of multipath and ments. The K-factor of a channel is equal to the
an obstructed or weak LoS signal, motivates the ratio of the square of the peak amplitude of the
need to develop more accurate and robust local- dominant signal and the variance in the channel
ization approaches that exploit the wide bandwidth amplitude and is known to indicate the degree of
and narrow beamwidths of 5G and beyond for multipath in a signal [13]. In NLoS channels, due
multipath-rich NLoS environments. to the absence of a direct path, the K-factor is close
to 0 dB. The angular spread of NLoS channels is
C. NLoS Mitigation for Accurate Positioning wider since the multipath components arrive from
varied directions.
To combat the poor performance of traditional
ToA-, TDoA-, and AOA-based localization tech- NLoS classification accuracy is improved when
niques in NLoS environments, NLoS mitigation multiple channel characteristics are used in tan-
techniques can identify and then discard NLoS dem [13]. A support vector machine (SVM) is a
signals to only use the LoS BSs for localization. popular classifier capable of classifying data based
This subsection describes a variety of techniques to on multiple parameters. An SVM utilizes channel
selectively identify and discard the NLoS signals. characteristics to determine a hyperplane, which
In [11] the authors observed that with conven- divides data into two classes. For NLoS identifica-
tional WiFi radios operating at 2.4 GHz, the AoA tion, the SVM determines the optimal hyperplane to
was stable over small UE movements (5 cm) in LoS divide data into LoS and NLoS classes. In [13], an
environments, while in NLoS environments, the SVM was shown to outperform individual channel
AoA varied by more than 5° if the UE was moved features, reducing the NLoS identification error rate
by 5 cm. If the AoA of the received power varied by from 10 percent to 5 percent.III. S UB - METER P RECISE P OSITION L OCATION environment with centralized and distributed coop-
erative localization, respectively, over an area of
Identifying and discarding NLoS signals to only approximately 40 m × 20 m with four BS with
use LoS signals for localization wastes multipath known locations and 13 unknown UE locations [1].
signal energy, and requires dense BS deployment
since the UE must be in LoS of two or more BSs B. Machine Learning for Localization
for classical LoS positioning techniques to work.
However, such over-deployment of BSs may be In contrast to geometry-based localization algo-
cost-prohibitive. We shall now look at alternative rithms, machine learning provides a data-centric
localization techniques wherein the UE utilizes view of the UE localization problem. Localization
information from neighboring UEs, and exploits algorithms that employ machine learning first cre-
NLoS BSs, and multipath. ate a “fingerprinting database” of the environment
during the training (offline) phase [9]. A fingerprint
A. Cooperative Localization is a vector containing channel parameters such as
the received signal strength (RSS), channel state
With the introduction of device-to-device (D2D) information (CSI), and the AoA of the strongest
communication protocols in 5G [1], an exciting signal of all BS links measured a priori at known lo-
avenue for cooperative localization has opened up. cations called reference points, distributed through-
UEs may now directly communicate with one an- out the environment. A fingerprinting database is
other instead of communicating with the BS alone constructed by storing the fingerprint measured at
in order to achieve localization of all UE. each reference point with the coordinates of the
Due to dedicated communication resources al- reference point.
located for D2D communication in 5G, UEs may Once the fingerprinting database is constructed,
conduct range and angular measurements on each then in the real-time online position location step
D2D link. Since UEs are typically located closer the BS-UE channel is measured by the UE. The
to one another than to BSs, the probability of D2D channel measurements are matched to the finger-
links being LoS and having higher signal-to-noise printing database (stored in the UE or in the
ratio (SNR) is greater, providing better positioning network) to determine the UE position. Matching
accuracy. In a network with N UEs, up to N2 may be done via maximum a posteriori (MAP)
additional D2D link measurements are possible. estimation.
The relative UE location information, extracted Alternatively, matching may be performed by
from the D2D link measurements, may be sent utilizing a similarity criterion to compare the online
to a central localization unit co-located at one of measurements to the fingerprinting database. A
the serving BS or a central server (i.e., centralized common similarity criterion is the distance, such as
cooperative localization). The position of all the the Euclidean (L2 ) or the Manhattan (L1 ) distance,
UEs in the network is simultaneously determined of the online measurements from the channel mea-
by nonlinear least squares (LS) estimation, wherein surement at the reference points. In the k-nearest
the positions of the UEs that jointly minimize neighbor (k-NN) algorithm, the user position is
the deviation from the physical angular orientation the weighted average of the k “nearest” reference
and distance-based link constraints are determined. points.
Optimization techniques such as the Levenberg- The UE localization problem can be restated as
Marquardt algorithm (LMA) [14], which combines determining the nonlinear function that transforms
the Gauss-Newton algorithm and the method of the channel parameters into a position estimate.
gradient descent, may be used for nonlinear LS A neural network determines the nonlinear func-
estimation. tion, based on data available in the fingerprinting
Centralized cooperative localization in future database. A neural network is a series of multi-level
dense IoT networks may lead to network conges- nonlinear functional transformations of the input,
tion if all localization messages are routed to a which can be used to approximate a target func-
central server. In distributed algorithms, UEs are tion. For user localization, the inputs to the neural
localized based on local measurements exchanged network are the measured channel parameters, and
by neighboring nodes (as is done in centralized the target function is the positional coordinates of
localization). The location estimates of the UEs the user. Successive layers of a neural network are
are then iteratively refined until all neighboring combined linearly by weights. The optimal weights
UEs reach an agreement [1]. While not as accurate that transform the inputs (channel parameters) as
as infrared methods [3], a root mean square error close as possible to the target function (user po-
of 2.5 m and 3 m was achieved in an indoor sition) are found in the offline training phase byModern cell phones are equipped with a variety
of sensors. UEs possess an inertial measurement
unit (IMU), consisting of a gyroscope to measure
rotation, an accelerometer to measure acceleration,
and a magnetometer to measure the magnetic field
intensity. Given the initial position of the user, the
current user position may be obtained by integrat-
ing the measured acceleration twice to get the user
position. However, errors in IMU measurements
grow with time - a constant offset in acceleration
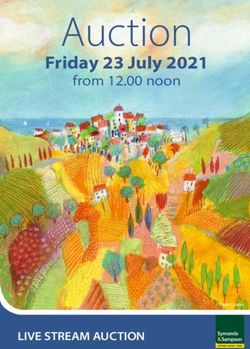
Fig. 3. Map generation on-the-fly and seeing through walls using measurement leads to a quadratic error in position.
narrow beam antennas and multipath. Data from the sensors may be fused with channel
measurement data using a Kalman filter/ extended
Kalman filter (KF/EKF) to correct the drift in
minimizing the closeness of the output of the neural IMU measurements. A KF is a recursive linear
network to the target function at the reference estimator of the state (position and velocity) of
points. a user. The current state of the user is modeled
Machine-learning-based localization algorithms as a linear transformation of the state of the user
require the availability of a dense fingerprinting at the previous time instant, based on kinematic
database, the creation of which is a time-intensive equations derived from Newton’s laws of motion,
process. The localization accuracy of fingerprint- whereas sensor measurements are modeled as a
ing algorithms depends on the distance between linear transformation of the current state of the user.
reference points, with the localization accuracy A KF is the optimal estimator of a linear process,
typically on the order of the distance between given the mean and variance of the noise. If the
the reference points. Additionally, changes in the relation is not linear, an EKF may be used to locally
environment such as the addition of new furniture linearize the process via Taylor series expansion
require the fingerprinting database to be re-created. [1]. The KF/EKF minimizes the mean square error
Transfer learning may be leveraged to reduce the of the position estimate based on measurements
amount of data required. Theoretical radio wave obtained from all sensors up to the current time
propagation models are leveraged to replace data instant. When new information is obtained by the
collection partially by ray tracing. The ray tracer, user in the form of new channel measurements or
once calibrated to the environment based on the new sensor data, the KF/EKF recursively updates
limited measurements conducted, may be used to the position estimate based on the old position
predict channel parameters at the reference points. estimate and the new data.
Minor changes to the propagation environment may
be quickly incorporated into the environment map D. Localization Algorithms Exploiting Multipath
utilized by the ray tracer, expediting the process of As discussed earlier, multipath components are
creating (and updating) the fingerprinting database. conventionally thought to be a hindrance to ac-
A neural network may be first trained on the curate localization. However, in conjunction with
synthetic data generated by the ray tracer, with the a map of the environment, multipath components
weights of the neural network refined by further provide additional vital useful information regard-
training on real-world measurements. ing the location of the UE. For example, with a map
of the environment available (Fig. 3), “forbidden
C. User Tracking and Data Fusion transitions” of a UE wherein the UE moves through
walls or from one floor to another in consecutive
Localization accuracy of a stationary target may time steps may be detected and discarded.
be improved by averaging the position estimate, Multipath components from the BS may arrive at
reducing the variance of the estimate. For mobile the UE via a direct path or via indirect paths along
targets, the location must be estimated in a shorter which the source ray suffers multiple reflections
period of time, which can be achieved via user or scattering. Virtual anchors (VAs) are successive
tracking. User tracking refers to continuously es- reflections of the BS on walls in the environment
timating the position of a mobile UE, due to which [1], which are treated as an LoS BS in place of
sudden changes in the user’s apparent position the physical NLoS BS. Future wireless devices
from one sampling instant to another, caused by will exploit real-time ray tracing [10] for multipath
positioning errors, may be smoothed out. propagation prediction in order to determine theTABLE I. Summary of the different position location techniques
Position Location Method Description BS Density Deployment Cost Accuracy
Use uplink and downlink
Fundamental Techniques AoA, ToA, TDoA measurements High Low [10] Low [10]
to calculate position via geometry
Use side-link (UE-UE) measurements to
Cooperative Localization Low Low [1] Medium [1]
complement BS-UE measurements
Channel features mapped to
Machine Learning Medium High [9] High [9]
values stored in fingerprint database
Refine position estimate
User Tracking of fundamental techniques, Medium Low [1] Medium [1]
predict user trajectory with sensor data
Extract position information
Multipath Exploiting Techniques Low Medium [7], [14] High [7], [14]
embedded in multipath components
VA locations. If the user’s location is continuously scatterer and user locations where the expected dis-
tracked with an EKF, each multipath component tances and angles (geometrically calculated) match
received by the UE may be associated with a VA the measured distances and angles most closely in
based on the previously estimated UE location. the least squared sense. Optimization techniques
Once the correspondence between each multipath such as particle swarm optimization (PSO) and
component and the VAs is known, any of the the LMA [14] may be used for nonlinear LS
fundamental localization techniques (AoA, ToA, or optimization.
TDoA) may be used to localize the UE.
With large bandwidths and narrow beamwidths at IV. C ONCLUSION AND F UTURE R ESEARCH
mmWave frequencies, more multipath components This article has provided an overview of existing
are resolvable, which makes the task of associating and emerging localization techniques, illustrating
the multipath components with the VA more diffi- how utilizing the wide bandwidths at mmWave
cult. Ray tracing may be used to take advantage of frequencies could lead to unprecedented localiza-
NLoS multipath components arriving at a UE, pro- tion accuracies. The narrow antenna beamwidths
viding single-shot user location estimation without at mmWave frequencies require smart beam man-
user tracking. With knowledge of the AoA at the agement, while optimal localization requires an
BS, the ToA of the source rays, and a map of the exploration of multipath components arriving from
surrounding environment, the BS may determine all directions, for which a detailed study of joint
the location of the UE via ray tracing each mul- communication and localization is required. Table
tipath component. Since it is not known whether I provides a summary of the different position
the signal is reflected or transmitted through each location methods.
obstruction along the traced signal path, two possi- Looking into the future, we predict that a combi-
ble locations are recursively stored as “candidate nation of machine learning, data fusion of measure-
locations” at each obstruction encountered while ments from multiple sensors, and cooperative lo-
ray tracing a multipath component. A majority of calization will be used for robust, accurate position
the candidate locations will be clustered near the location. The wireless systems will need to seam-
true UE location, so the user may be localized to the lessly transfer the localization responsibility from
centroid of the largest cluster of candidate locations one wireless technology (e.g., WiFi access points
[7]. indoors) to another (e.g., cellular BSs outdoors),
In the absence of a map, with the assumption that similar to handovers in current cellular networks
each multipath component is reflected or scattered when a user moves in and out of BS coverage cells.
at most one time, the problem of determining With centimeter-level localization accuracy in
the location of a UE can be reformulated into a future cellular networks, privacy will become a
nonlinear LS estimation problem [14]. The scat- growing concern. Users must be allowed to opt out
terer/reflector positions and the UE position and of tracking if they so desire, and any user location
orientation are estimated by jointly finding the data stored in the network must be protected fromhackers. Additionally, the localization solution must [5] T. S. Rappaport, J. H. Reed, and B. D. Woerner, “Position
be robust to interference from malicious users, who location using wireless communications on highways of the
future,” IEEE Communications Magazine, vol. 34, no. 10, Oct.
could, for instance, attempt to replicate the refer- 1996, pp. 33–41.
ence signals transmitted by the cellular network in [6] 3GPP, “E-UTRA; Requirements for support of radio resource
order to gain unauthorized access to user location management (Release 15),” TS 36.133 V15.9.0, Jan. 2020.
[7] T. S. Rappaport et al., “Wireless Communications and Appli-
information. cations Above 100 GHz: Opportunities and Challenges for 6G
The computing capabilities of UEs will enable and Beyond,” IEEE Access, vol. 7, June 2019, pp. 78 729–
mapping and ray tracing in real time. We envisage 78 757.
[8] C. A. Balanis, Antenna theory: analysis and design, 4th ed.
that cell phones in the future shall generate a map Hoboken, New Jersey: John Wiley & Sons, 2016.
of the environment on the fly or have maps loaded [9] J. Gante, G. Falcão, and L. Sousa, “Deep Learning Architec-
within, enabling map-based localization algorithms tures for Accurate Millimeter Wave Positioning in 5G,” Neural
Processing Letters, vol. 51, no. 1, Aug. 2020, pp. 487–514.
that exploit real-time multipath propagation. The [10] O. Kanhere and T. S. Rappaport, “Position Locationing for
augmentation of human and computer vision will Millimeter Wave Systems,” in Proc. IEEE GLOBECOM 2018,
allow users to see in the dark and see through Dec. 2018, pp. 1–6.
[11] J. Xiong and K. Jamieson, “ArrayTrack: a fine-grained indoor
walls [7]. Cell phones in the future will have the location system,” in USENIX, NSDI, Apr. 2013.
capability to either download or generate a map [12] J. Schroeder, S. Galler, K. Kyamakya, and K. Jobmann,
of the environment on the fly and “see in the dark” “NLOS detection algorithms for Ultra-Wideband localization,”
in 2007 4th Workshop on Positioning, Navigation and Com-
[7]. The UE will behave like a radar, measuring the munication, March 2007, pp. 159–166.
distances of prominent features in the environment, [13] C. Huang et al., “Machine Learning-Enabled LOS /NLOS
such as walls, doors, and other obstructions. Ad- Identification for MIMO Systems in Dynamic Environments,”
in IEEE Transactions on Wireless Communications, vol. 19,
ditionally, reflections and scattering off walls will no. 6, June 2020, pp. 3643-3657.
enable cell phones to view objects around corners [14] A. Shahmansoori, G. E. Garcia, G. Destino, G. Seco-Granados,
or behind walls [7], as illustrated in Fig. 3. and H. Wymeersch, “Position and Orientation Estimation
Through Millimeter-Wave MIMO in 5G Systems,” IEEE
For ranging measurements, a radar operates in Transactions on Wireless Communications, vol. 17, no. 3,
the pulsed radar mode, wherein the radar transmits March 2018, pp. 1822–1835.
a single pulse, switches from transmit to receive [15] J. Zhou, N. Reiskarimian, J. Diakonikolas, T. Dinc, T. Chen,
G. Zussman, and H. Krishnaswamy, “Integrated full duplex
mode, and waits for the echo back from the object radios,” IEEE Communications Magazine, vol. 55, no. 4, Apr.
that is to be range-estimated. However, due to 2017, pp. 142–151.
constraints on switching speed, only objects at a
sufficient distance from the user may be ranged. B IOGRAPHIES
For example, an mmWave phased array with a O JAS K ANHERE received the B.Tech. and
TX-RX switching time of ∼100 ns cannot range M.Tech. degrees in electrical engineering from IIT
objects closer than 50 ft (electromagnetic waves Bombay, Mumbai, India, in 2017. He is currently
travel 1 ft/ns). To range closer objects, a UE pursuing the Ph.D. degree in electrical engineering
must simultaneously transmit and receive the radar with the NYU WIRELESS Research Center, New
signal, operating in the full duplex mode, requiring York University (NYU) Tandon School of Engi-
TX-RX isolation [15]. neering, Brooklyn, NY, USA, under the supervision
of Prof. Rappaport. His research interests include
V. ACKNOWLEDGMENTS mmWave localization and channel modeling.
This work is supported by the NYU WIRELESS T HEODORE S. R APPAPORT (S’83-M’84-SM’91-
Industrial Affiliates Program and National Science F’98) is the David Lee/Ernst Weber Professor at
Foundation (NSF) Grants 1702967, 1731290, and New York University (NYU) and holds faculty
1909206. appointments in the Electrical and Computer En-
gineering department, the Courant Computer Sci-
R EFERENCES ence department, and the NYU Langone School
of Medicine. He founded NYU WIRELESS, a
[1] T. Pedersen and B. H. Fleury, “Whitepaper on New Local- multidisciplinary research center, and the wireless
ization Methods for 5G Wireless Systems and the Internet-of-
Things,” COST Action CA15104, IRACON, Apr. 2018. research centers at UT Austin (WNCG) and Vir-
[2] H. Guan, J. Li, S. Cao, and Y. Yu, “Use of mobile LiDAR in ginia Tech (MPRG). His research has provided
road information inventory: A review,” International Journal fundamental knowledge of wireless channels used
of Image and Data Fusion, vol. 7, no. 3, 2016, pp. 219–242.
[3] C. D. McGillem and T. S. Rappaport, “A beacon navigation to create the first Wi-Fi standard (IEEE 802.11),
method for autonomous vehicles,” IEEE Transactions on Ve- the first US digital TDMA and CDMA standards,
hicular Technology, vol. 38, no. 3, Aug. 1989, pp. 132–139. the first public Wi-Fi hot spots, and more recently
[4] C. Falsi, D. Dardari, L. Mucchi, and M. Z. Win, “Range
Estimation in UWB Realistic Environments,” in 2006 IEEE proved the viability of millimeter wave and sub-
ICC, June 2006, pp. 1–6. THz frequencies for 5G, 6G, and beyond.You can also read