Mayfly Optimization Algorithm Applied to the Design of PSS and SSSC-POD Controllers for Damping Low-Frequency Oscillations in Power Systems ...
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Hindawi International Transactions on Electrical Energy Systems Volume 2022, Article ID 5612334, 23 pages https://doi.org/10.1155/2022/5612334 Research Article Mayfly Optimization Algorithm Applied to the Design of PSS and SSSC-POD Controllers for Damping Low-Frequency Oscillations in Power Systems Elenilson V. Fortes ,1 Luı́s Fabiano Barone Martins ,2 Marcus V. S. Costa ,3 Luis Carvalho ,3 Leonardo H. Macedo ,4 and Rubén Romero 4 1 Goiás Federal Institute of Education, Science, and Technology, Rua Maria Vieira Cunha, 775, Residencial Flamboyant, 75804-714 Jataı́, GO, Brazil 2 Paraná Federal Institute of Education, Science, and Technology, Av. Doutor Tito, s/n, Jardim Panorama, 86400-000 Jacarezinho, PR, Brazil 3 Federal Rural University of the Semi-Arid Region, Rua Francisco Mota, 572, Pres. Costa e Silva, 59625-900 Mossoró, RN, Brazil 4 São Paulo State University, Avenida Brasil, 56, Centro, 15385-000 Ilha Solteira, SP, Brazil Correspondence should be addressed to Elenilson V. Fortes; elenilson.fortes@ifg.edu.br Received 28 October 2021; Revised 24 December 2021; Accepted 14 February 2022; Published 26 April 2022 Academic Editor: Mouloud Azzedine Denaı̈ Copyright © 2022 . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In this paper, it is proposed to apply the mayfly optimization algorithm (MOA) to perform the coordinated and simultaneous tuning of the parameters of supplementary damping controllers, i.e., power system stabilizer (PSS) and power oscillation damping (POD), that actuate together with the automatic voltage regulators of the synchronous generators and the static synchronous series compensator (SSSC), respectively, for damping low-frequency oscillations in power systems. The performance of the MOA is compared with the performances of the genetic algorithm (GA) and particle swarm optimization (PSO) algorithm for solving this problem. The dynamics of the power system is represented using the current sensitivity model, and, because of that, a current injections model is proposed for the SSSC, which uses proportional-integral (PI) controllers and the residues of the current injections at the buses, obtained from the Newton–Raphson method. Tests were carried out using the New England system and the two-area symmetrical system. Both static and dynamic analyses of the operation of the SSSC were performed. To validate the proposed optimization techniques, two sets of tests were conducted: first, with the purpose of verifying the performance of the most effective algorithm for tuning the parameters of PSSs, PI, and POD controllers, and second, with the purpose of performing studies focused on small-signal stability. The results have validated the current injections model for the SSSC, as well as have indicated the superior performance of the MOA for solving the problem, accrediting it as a powerful tool for small-signal stability studies in power systems. 1. Introduction should evolve to a new acceptable equilibrium point after being submitted to small- or large-magnitude disturbances. The increase in the demand for electricity, the industrial Typically, low-frequency oscillations occur in the range expansion, and the interconnection of large systems with of 0.2 − 2.0 Hz and are associated with electromechanical high numbers of generating units contributed to potentiate torque imbalances in synchronous generators, resulting in the appearance of problems related to the operation of power transfer with oscillatory characteristics in transmis- electric power systems, including stability issues. sion lines that interconnect two systems. Oscillations in the According to [1], the stability concept is related to the frequency range of 0.8 − 2.0 Hz are classified as local, while capacity that power systems have to remain in equilibrium in those occurring in the range of 0.2 − 0.7 Hz are classified as normal operating conditions. Besides, the system operation interarea [1].
2 International Transactions on Electrical Energy Systems One of the problems addressed in this work is to develop method [18]. The control structure used to model the SSSC’s techniques capable of designing supplementary damping dynamics is based on proportional-integral (PI) controllers, controllers for damping these types of oscillations present in as proposed by [17, 19]. The proposed model can be used power systems. [2] already used, in 1969, the Heffron and both for the control of active and reactive power flows by the Phillips’s model [3] to represent a single machine infinite bus SSSC and for obtaining the dynamic equations of the device system and explored the important concepts of synchro- that are included in the model used to represent the power nizing torque and damping, through which they laid the system dynamics, i.e., the current sensitivity model (CSM) foundation for understanding the phenomenon of angular [7, 12, 17]. Furthermore, the proposed model for the SSSC, stability under small-signal disturbances. In the work pre- when compared to other representations available in the sented by [2], it was observed that automatic voltage reg- literature [20, 21], has the significant advantage of being ulators (AVRs) with high gains negatively affected the independent of the phase angle of the voltage source of the stability of the system. Since then, power system stabilizers SSSC (see Section 2) eliminating, in this way, the necessity (PSSs) controllers have been widely used to insert supple- for its previous calculations. More details about the SSSC mentary stabilizing signals into the generators’ excitation modeling will be presented in Section 2. control systems in order to provide additional damping Regarding the CSM, it is a linear model whose funda- torques to rotors’ oscillations [4–6]. It should be noted that, mental principle is based on the nodal balance of currents. in general, PSSs have good performance for damping local This balance must be satisfied in all dynamic processes of the oscillatory modes [7, 8], while they cannot adequately damp power system and, therefore, can be used in small-signal interarea modes. On the other hand, depending on the stability studies [7, 12, 17]. Thus, all devices present in the settings provided to the control parameters of the PSSs (time system should be modeled by current injections, which constants and gains) they can turn previously stable modes justifies the new modeling proposed for the SSSC (see into unstable modes, in particular, the interarea ones [9]. Subsection 2.1). The recent advances in power electronics propitiated the The AVR-PSS and SSSC-POD sets are only able to ef- emergence of flexible AC transmission systems (FACTS) fectively damp the poles of interest of the system if the that have been widely used in power systems with the most parameters of the corresponding controllers (PSS and POD) diverse purposes. In general, FACTS can increase power are adequately adjusted. In the literature, different optimi- transfer and consequently improve the stability of a system zation techniques have been used for this purpose. In 2010, [10, 11]. Recent studies show that when a power oscillation [22] developed a design procedure using the particle swarm damping (POD) controller is coupled to the control loop of optimization (PSO) algorithm for the simultaneous and these devices, the FACTS-POD set can act inserting addi- coordinated design of the thyristor-controlled series ca- tional damping to the interarea modes as can be analyzed in pacitor (TCSC) damping controller and PSSs in multi- the works of [7, 12, 13]. In these works, the POD was coupled machine power systems. Tests were conducted using the to the unified power flow controller (UPFC), generalized two-area symmetrical system, with four generators. In 2014, unified power flow controller (GUPFC), and the interline [23] presented a coordinated approach for the allocation and power flow controller (IPFC) with the goal of inserting design of PSSs and UPFC using genetic algorithms (GA). additional damping to the interarea oscillatory modes The GA algorithm determines the optimal location for the present in power systems. UPFC installation while simultaneously tuning its control In this work, the static synchronous series compensator parameters, resulting in the optimization of the number, (SSSC) FACTS is modeled and employed to perform studies locations, and parameters of the PSSs. The problem is for- that address both static and dynamic analyses of the power mulated with the objective of maximizing the damping system. In general terms, the SSSC performs a series ratios of the electromechanical modes. In 2016, [24] pre- compensation of the electric power transmission system. Its sented a hybrid method is to damp oscillations in the power operation consists of inserting (by means of a coupling systems equipped with UPFC and PSS controllers. The transformer) a synchronous quasi-sinusoidal voltage source hybrid method consists of an offline and an online stage. In of controllable amplitude and phase angle in series with the the offline stage, the parameters of the PSS and UPFC transmission line. This provides an effect capable of controllers are determined through a PSO algorithm; then in reproducing an inductive or capacitive reactance in series the second stage, an online fuzzy controller is proposed to with the transmission line where the device is connected, determine parameters of the PSS and UPFC controllers thus allowing effective control of the active and reactive coefficients according to the operating point of the system. power flows in the line where the SSSC is installed [10, 11]. Tests were conducted using the single machine infinite bus Existing works in the literature that perform the control system, with only one generator. In 2018, [25] proposed to of active and reactive power flows using the SSSC, usually explore the process of tuning controllers for conditions model it by power injections [14–16]. In this paper, a new using control theory. Tests were conducted using the two- model based on current injections is presented for the SSSC area symmetrical system. in order to perform both static and dynamic analyses of the In general, more recent works found in the literature do device in the New England system [17]. The model will allow not use the CSM to represent the power system dynamics, the SSSC operation to be represented in the expanded power which is, therefore, a differential of the proposed work. In flow algorithm expressed as a function of the residues of the this context, it is possible to cite the works [26–29]. In [28], current injections at the buses using the Newton-Raphson three optimization algorithms, i.e., GA, PSO, and the
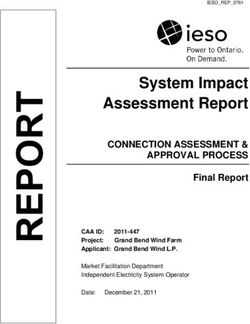
International Transactions on Electrical Energy Systems 3 farmland fertility algorithm (FFA) are used to tune the Section 3, the CSM, used to represent the power system control parameters of the PSSs in the New England system dynamics, is presented together with details about the using a linearized power system model. In [27], the dif- representation of the SSSC; Section 4 presents details about ferential evolution (DE) algorithm, PSO algorithm, gray wolf the structure of the supplementary damping controllers (PSS optimizer (GWO), whale optimization algorithm (WOA), and POD) and their respective differential equations rep- and chaotic whale optimization algorithm (CWOA) were resenting their dynamics; Section 5 presents some details used in a single machine infinite bus (SMIB) system in order about the implementation of the GA, PSO algorithm, and to adjust the parameters of the proportional-integral (PI) MOA; Section 6 presents details about the problem for- controller. It is worth noting that in this article, the simu- mulation, discussing the representation of a candidate so- lated FACTS was the generalized unified power flow con- lution and the objective function used in the optimization troller (GUPFC). In [26], the modified sine cosine algorithm methods; Section 7 presents the simulations and results for (MSCA) was used to tune the control parameters of PSSs and the implementations using the New England system and the SSSC in a SMIB system and a multi-machine system. Finally, two-area symmetrical system; finally, and Section 8 presents in [29], the parameters of the PSSs were adjusted in a co- the main conclusions of the work. ordinated and simultaneous way using the backtracking search algorithm (BSA). The results are obtained from 2. Static Synchronous Series Compensator simulations performed on two multi-machine systems and are compared to the results of the PSO algorithm. The SSSC FACTS can be represented by a voltage source In this work, a recently proposed optimization tech- converter (VSC) connected in series with the transmission nique, known as the mayfly optimization algorithm (MOA) line. This device can vary the effective impedance of the line [30], is implemented for designing the supplementary by injecting a voltage in phase with respect to the line damping controllers. This technique is based on the PSO current, thus allowing the exchange of active and reactive algorithm [31] and has the advantages of combining the powers with the transmission system [38]. In Figures 1(a) main features of the PSO algorithm, GA [32, 33], and the and 1(b), the schematic diagram and equivalent circuit of the firefly algorithm (FA) [34]. It provides a powerful hybrid SSSC are shown, respectively. algorithmic framework, based on the behavior of mayflies, In Figure 1(a), the SSSC is represented using a VSC in the performance of PSO algorithm, with crossover tech- series with the transmission line. The VSC is connected to niques [35], and local search [36], since it has been proven the system through a coupling transformer with a reactance that the PSO algorithm needs some modifications to achieve xkn , and by means of gate turn-off thyristors, it modulates a an optimal solution for high-dimensional search spaces [37]. DC voltage coming from an external source. In Figure 1(b), From the above, the main contributions of this work are the phase angle c of the voltage source V s is represented by as follows: (1). Furthermore, bkn � −1/xkn is the susceptance of the coupling transformer, and V k and V m are, respectively, the (i) To present a new current injections model for the voltage phasors at buses k and m. Finally, V n is the voltage SSSC phasor at the fictitious bus (FB), n, included in the system to (ii) To use an expanded power flow tool based on the perform simulations with the SSSC, and Znm is the im- residues of the currents to determine the current pedance of the transmission line between buses n and m: injections of the SSSC Vp (iii) To include PI controllers in the control loop of the c � arctan , (1) shunt converter of the SSSC Vq (iv) To represent the power system and its supple- where 0 ≤ c ≤ 2π, Vq and Vp are, respectively, the in-phase mentary damping controllers (PSSs and POD) using and quadrature components of the voltage source V s the CSM [39, 40]. (v) To implement the PSO algorithm, GA, and MOA to perform the design of the supplementary damping 2.1. Current Injections Model for the SSSC. From (1) and the controllers equivalent circuit of the SSSC, shown in Figure 1(b), (2)–(5) The remainder of this work is organized as follows: in are obtained. These are decomposed into real, r, and Section 2, the SSSC is modeled through current injections; in imaginary, i, components: Ikr � bkm −Vk sin θk + Vm sin θm + bkm Vp cos θk + Vq sin θk , √√√√√√√√√√√ √√√√√√√√√√√ (2) Isssc inj kr Iki � bkm Vk cos θk − Vm cos θm + bkm Vp sin θk − Vq cos θk , √√√√√√√√√√√ √√√√√√√√√√√ (3) Isssc inj ki
4 International Transactions on Electrical Energy Systems Ṽk Ṽn Transmission Line Ṽm Ṽk SSSC Ṽn Transmission Line Ṽm Z̃nm Vs∠γ bkn Z̃nm SSSC + − xkn k VSC n m k n m c (a) (b) Figure 1: (a) Representation of the SSSC FACTS and (b) equivalent circuit of the SSSC. Ikmr � bkm Vk sin θk − Vm sin θm − bkm Vp cos θk + Vq sin θk , √√√√√√√√√√√ √√√√√√√√√√√ (4) Isssc inj mr Ikmi � bkm −Vk cos θk + Vm cos θm − bkm Vp sin θk − Vq cos θk , √√√√√√√√√√√ √√√√√√√√√√√ (5) Isssc inj mi pi K 1 where Isssc sssc sssc sssc injk , Iinjk and Iinjm , Iinjm are, respectively, the real, in V_ p � pi1 Pref ctrl pod km − Pkm + pi X1 + Vsup − Vp , (6) r i r i Tm Tm (2) and (4), and imaginary, in (3) and (5), components of the currents injected into buses k and m by the SSSC at the 1 common buses of its installation. In Figure 2, the single-line X_ 1 � pi Pref ctrl km − Pkm , (7) T1 diagram of the proposed current injections model for the SSSC is illustrated. pi The great advantage of using the current injections K 1 V_ q � pi2 Qref ctrl m − Qm + X2 − Vq , (8) model for the SSSC, as shown (2)–(5) and depicted in Tm T mp Figure 2, is the fact that this model keeps the current flow equations unchanged and considers the device 1 contributions at the common buses to its installation as X_ 2 � pi Qref ctrl m − Qm , (9) T2 if they were current injections. This facilitates the in- clusion of the SSSC current injections model in con- where the quantities Pctrl ctrl ref ref m , Qm , Pm , and Qm are, respec- ventional power flow models, such as in tively, the control and specified values of the active and Newton–Raphson method. reactive power flows on the line between buses k − m. 2.2. Control System for the SSSC. To perform the control of 3. Power System Operation Model the active and reactive power flows by the SSSC (Figure 3) on Suppose an SSSC is installed in a power system, being k the the common buses to its installation, the PI controllers are common bus to its installation. The residue of the current used [7, 12, 17]. injected at bus k, Δ Ik , is determined from the current The PI controllers shown in Figures 3(a) and 3(b), are balance, as illustrated in Figure 4. used, respectively, to modulate the synchronous voltage From Figure 4, by inspection, (10) is obtained, repre- pi source control variables, Vp and Vq . The time constant Tm is senting the nodal current balance at bus k: the inherent delay of the control device and is determined in the range between 1 and 10 ms [10]. In addition, X1, X2, and IGk + Isssc L injk − Ikj − Ik � ΔIk , X3 are input signals and, in this case, are specified. The (10) pi pi j∈Ωk parameters of the PI controllers are the gains K1 and K2 , pi pi G and the time constants, T1 and T2 . The supplementary where Ik is the current phasor injected at node k, as shown signal Vpod sup comes from a POD controller (see Section 4) in (11), j∈Ωk Ikj are the current phasors on the lines con- and, will be used to modulate the quadrature axis compo- nected to bus k, as shown in (12), in which Ωk is set of all nent, Vp . L neighboring buses of bus k, Ik is the current phasor drained The dynamic behavior of the control structure shown in sssc by the load at bus k, as calculated in (13), and Iinjk is the Figure 3 is given by (6)–(9), which are obtained by current phasor injected at bus k by the SSSC, as shown in inspection: (14):
International Transactions on Electrical Energy Systems 5 Ṽk Ṽm Vs∠γ bkn + − sssc = I sssc + j I sssc sssc = I sssc + j I sssc I˜inj injkr inj I˜inj injmr inj k kj m mj Figure 2: Current injection model of the SSSC. K1pi Pkm ref + + 1 X1 + 1 Vp ∑ ERROR sT1pi ∑ ∑ OUTPUT + 1 + sTmpi − + Pkm ctrl Vsup pod (a) K2pi Qkm ref + + 1 X2 1 Vq ∑ ERROR ∑ OUTPUT sT2pi + 1 + sTmpi − Qkm ctrl (b) Figure 3: Structure of the control system of the SSSC. ∑ I˜kj j∊Ω k Ωk Ṽk I˜kG sssc I˜inj k I˜kL Figure 4: Current balance at bus k. IGk � 1 PGk cos θk + QGk sin θk + j 1 PGk sin θk − QGk cos θk , (11) Vk Vk Ikj � Vj Gkj + jBkj cos θj + j sin θj , (12) j∈Ωk j∈Ωl ILk � 1 PLk cos θk + QLk sin θk + j 1 PLk sin θk − QLk cos θl , (13) Vk Vk Isssc injk � bkm Vp cos θk + Vq sin θk + jbkm Vp sin θk − Vq cos θk , (14)
6 International Transactions on Electrical Energy Systems where PGk and QGk are the active and reactive powers injected Ṽk Ṽm by the generator at bus k, Gkj and Bkj are the conductance and susceptance between buses k and j, and PLk and QLk are bkm ctrl ctrl Pmk + jQmk Pm + jQm the active and reactive power drained by the load connected at bus k. For the SSSC to control the power flows, it is necessary ctrl that Pctrl km and Qkm are included as functions of the power sssc Pinj sssc + jQinj m m system’s voltages and reactances, and the device’s control variables. For this purpose, the active and reactive power Figure 5: Active and reactive power balances for the SSSC. balances must be analyzed, according to Figure 5. In Figure 5, the active and reactive power flows that are device at bus m are obtained by inspection, as shown, re- transmitted from bus m towards bus k, Pmk and Qmk , the spectively, in (15) and (16): active and reactive power flows controlled by the SSSC, Pctrl m and Qctrl m , and the active and reactive powers injected by the Pctrl m � −b km Vk V √√√√√√ m sin θkm √ √√√√√√ bkm Vm Vp cos θkm + Vq sin θkm , √ − √√√√√√√√√√√√√√ √√√√√√√√√√√√√√ (15) Pmk Psssc injm Qctrl m � −b 2 km Vm − V k Vm cos θkm − bkm Vm Vq cos θkm − Vp sin θkm . √√√√√√√√√ √ √√√√√√√√√ √ √√√√√√√√√√√√√ √ √√√√√√√√√√√√√√ (16) Qmk Qsssc injm For the SSSC to actuate in the power system, its equa- nonlinear algebraic expressions that can be found using tions must be inserted in the power flow formulation using Newton-Raphson algorithm, just as in the conventional the expanded power flow technique, proposed by Kopcak power flow. Since in this work the power flow modeling was et al. [18]. To do so, it is necessary to assume that its state done by current injections, the essence of the problem is to variables are considered constant with respect to time, which satisfy all current residues between the buses in which the makes its temporal derivatives equal to zero. This obser- SSSC is installed, as shown in Figure 4. vation allows, at an operation point of the power system, its The power flow equations formulated by current in- differential equations to be considered to be algebraic. Thus, jections are shown in the following equation: the problem is limited to determining the zeros of a set of (17) The Jacobian matrix shown in (17) is divided into four difference is in the elements marked with the “ ∗ ”, in blocks, J1sssc , J2sssc , J3sssc , and J4sssc . It is worth noting that which the derivatives that relate the injections of the real J4sssc has its construction similar to the Jacobian of the and imaginary components of the currents injected by the conventional power flow formulation. However, the SSSC are included.
International Transactions on Electrical Energy Systems 7 3.1. Current Sensitivity Model. The CSM is a linear analysis generators and nb buses is shown in (18)–(21). In this tool for power systems based on Kirchhoff’s current law, formulation, Δx represents the state variables, Δu repre- which must be met when the system is disturbed [7, 12, 17]. sents the input variables, and Δz represents the algebraic Its modeling for multi-machine systems composed of ng variables: ng [Δx] � [ Δω1 . . . Δωng Δδ1 . . . Δδng ΔE′1 ′ng 1 t q . . . ΔEq ΔEfd . . . ΔEfd ] , (18) ng [Δu] � [ ΔP1m . . . ΔPng 1 1 nb 1 nb t m ΔVref . . . ΔVref ΔPL . . . ΔPL ΔQL . . . ΔQL ] , (19) [Δz] � [ Δ θ1 . . . Δ θnb ΔV1 . . . ΔVnb ]t , (20) . Δx J1 J2 Δx B1 � + Δu , (21) 0 J3 J4 Δz B2 . Δx � AΔx + BΔu, (22) where Δω represents the variations of the angular speed, Δδ represents the variations of the internal angle of the where A and B are the state and input matrix, respectively, in rotor, ΔEq′ represents the variations of the internal voltage which A � J1 − J2J4− 1 J3 and B � B1 − J2J4− 1 B2. in quadrature, and ΔEfd represents the variations of the generator’s field voltage, ΔPm represents the variations of the input mechanical power, ΔVref represents the varia- 3.2. Inclusion of the SSSC in the CSM. The dynamic char- tions of the reference voltage of the AVR, ΔPL and ΔQL acteristics of the SSSC have already been incorporated into are, respectively, the variations of the active and reactive the power flow modeled by current injections and are shown power demands of the loads, and ΔV and Δθ are, re- in the submatrices J1sssc , J2sssc , J3sssc , and J4sssc in (17). These spectively, the voltage magnitude and voltage phase can be directly included in the CSM, as shown in the fol- variations at each bus of the power system. lowing equations: The representation in the state space, in the following equation, is obtained by eliminating Δz from (21): (23) .c −1 −1 Δx � J1c − J2c J4sssc J3c Δxc + B1c − J2c J4sssc B2c Δuc , (24) where k � 1, . . . , nb, Ac � J1c − J2c (J4sssc )− 1 J3c and Figure 6(b), have similar structures, differing only in the Bc � B1c − J2c (J4sssc )− 1 B2c are, respectively, the new state input and output signals adopted for each controller. Both and input matrices of the CSM. are represented by two lead-lag compensation blocks, pss pod pss pod characterized by the time constants T1 (T1 ), T2 (T2 ), pss pod pss pod pss pod 4. Dynamic Model of the PSS and T3 (T3 ), and T4 (T4 ), a gain K (K ) and a POD Controllers washout block, represented by the time constants pss pod Tω (Tω ). The purposes of the PSS and POD controllers are to insert, The input signal chosen for a PSS is the variation of the respectively, additional damping torque to the local and angular speed of the kth generator, Δωk , while the output of a interarea oscillatory modes present in the power system. PSS, ΔVpss sup , actuates on the control loop of the AVR of the In this work, both the PSSs, Figure 6(a), and the POD, kth generator (see Figure 6(a)). For the POD controller, the
8 International Transactions on Electrical Energy Systems ΔVk − ΔVref k + Kr ΔEfd ∑ k k 1 + sTr + k pss ΔVsup pss pss pss 1 + sT3 ΔV3 1 + sT1 ΔV2 sTω ΔV1 Δωk pss pss pss Kpss 1+ sT4 1+ sT2 1 + sTω k Lead-Lag Washout Gain (a) ΔXref + 1 ΔVp ∑ pod 1 + sTm + pod ΔVsup pod pod pod 1 + sT3 ΔY3 1 + sT1 ΔY2 sTω ΔY1 ΔPkm pod pod pod K pod 1+ sT4 1+ sT2 1 + sTω Lead-Lag Washout Gain (b) Figure 6: (a) Dynamic model of the PSS controller and (b) dynamic model of the POD controller. chosen input signal is the active power deviation of the Vref k . In Figure 6(b), ΔVp is the quadrature axis component pod transmission line adjacent to the installation of the device, of the series converter, ΔXref is an input signal and Tm is a ΔPkm , and the output signal, ΔVpod sup , actuates on the control time constant, being that both must be specified. pss pod pss pod loop of the SSSC, used to modulate the quadrature com- It is adopted that T1 (T1 ) � T3 (T3 ) and pss pod pss pod pod ponent, Vp , of the series converter of the SSSC (see T2 (T2 ) � T4 (T4 ) [1]. The time constant Tm is the Figure 6(b)). inherent delay of the control device with values between 1 − In Figure 6(a), the AVR installed at the kth generator is 10 ms [10]. represented by a gain Krk and a time constant Trk . The From the block diagram shown in Figure 6(a), the ex- excitation voltage of the synchronous machine is Efd , the pressions of the new state variables of the PSS that will be variations of the terminal voltage are represented byk ΔVk , included in the CSM are written as shown in (25)–(27), and and the variations of the reference voltage are represented by of the output signal, Vpss sup , according to (28): 1 pss ΔV_ 1k � − K Δωk + ΔV1k , (25) Tω k pss 1 T ΔV_ 2k � − 1 − 1pss Kpss Δωk + ΔV1k − ΔV2k , (26) T2 T2 pss pss 1 T T ΔV_ 3k � − 1 − 3pss ΔV2k + 1pss Kpss Δωk + ΔV1k − ΔV3k , (27) T4 T4 T2 pss pss T3 T1 ΔVpss sup � ΔV3k + pss pss ΔV2k + pss K Δωk + ΔV1k . (28) T4 T2 1 Kr Kr The procedure for including the PSS in the CSM at the ΔE_ fdk � − ΔEfdk + k ΔVref k − k ΔVk + ΔVpss sup . (29) Trk Trk Trk kth generator is terminated by adding the supplementary signal, according to (28), to the control loop of the AVR Analogously to the procedure performed for the PSS, shown from Figure 6(a). In this way, it is possible to obtain from Figure 6(b), the expressions of the state variables of the the following equation: POD that will be included in the CSM are obtained as shown
International Transactions on Electrical Energy Systems 9 in (30)–(32), and the supplementary output signal of the POD controller, Vpss sup , is obtained according to (33): 1 pod ΔY_ 1 � − K ΔPkm + ΔY1 , (30) Tpod ω pod 1 ⎢⎛ T ⎠ pod ΔY_ 2 � − pod ⎡ ⎣⎝1 − 1 ⎞ pod K ΔPkm + ΔY1 − ΔY2 ⎤⎥⎦, (31) T2 T2 pod pod 1 ⎧ ⎨ ⎬ ⎫ ΔY_ 3 � − ⎝ 1 − T3 ⎞ ⎛ ⎠⎡⎣ΔY + T1 Kpod ΔP + ΔY ⎤⎦ − ΔY , (32) pod ⎩ pod 2 pod km 1 3⎭ T4 T4 T2 pod pod T3 ⎣ ⎡ΔY2 + T1 Kpod ΔPkm − ΔY1 ⎦⎤. ΔVpod sup � ΔY3 + pod pod (33) T4 T2 Finally, (33), which represents the supplementary output or chromosomes, takes place, using the objective signal of the POD controller, is replaced into (6), which function for the problem (see (53)–(55)). describes the dynamics of the quadrature control voltage of (3) Selection: the probabilistic operator proportional the series converter of the SSSC, giving rise to the following selection used in the GA, draws individuals from a equation: population for crossover, in which each has drawn pi K1 1 chances proportional to their respective evaluation ref ctrl pod ΔV_ p � ΔPm − ΔPm + ΔX1 − Vsup − ΔVp . function values. This selection method is also known Tpi m Tpod m as the roulette rule [32]. (34) (4) Crossover: two individuals are chosen (P1 and P2), called parents, and the crossover operator is applied. 5. Optimization Techniques Two new individuals are obtained, known as off- spring (P1′ and P2′ ). The crossover occurs until a This section will present the details the three optimization new population of offspring is formed. In this work, methods that were used for the coordinated parameter two recombination points are used, and these points tuning design of the PI, PSS, and SSSC-POD controllers. are chosen randomly at each crossover step (see The GA with elitism, Subsection 5.1, the PSO algorithm, Figure 7). Subsection 5.2, and the MOA, Subsection 5.3, will be (5) Mutation: the mutation operator randomly changes discussed. one or more variables of a chromosome with a probability and within a range. This operator is used 5.1. Genetic Algorithm. The first GA was proposed by [33] in to allow diversification in the search process and the 1970s. He analyzed the phenomenon of the natural introduce diversity. evolution of species and applied operators in order to re- (6) Elitism: in the basic GA, the individuals obtained in produce this phenomenon when solving a complex problem. the previous generation are discarded, and only the In the particular case of this paper, the problem consists of new descendants are considered in the next gener- performing the coordinated tuning of the parameters of PI ation. Elitism consists in reintroducing the best- controllers and supplementary damping controllers (PSS evaluated individual from one generation to the next, and POD). The goal is to insert the desired damping to the avoiding the loss of important information present poles of interest present in the power system. in individuals and that may be lost during the Basically, in this work, the GA performs the seven steps crossover and mutation procedures. outlined below: (7) Verification of the convergence criterion: the goal is (1) Generation of the initial population: properly rep- to solve a constraint satisfaction problem [41]. Thus, resent the set of candidate solutions. The GA starts by the desired dampings are considered to be con- randomly generating a predefined number of initial straints of the problem and therefore any settings solutions, forming the initial population. determined for the parameters of the controllers (2) Evaluation function and constraints: evaluate the within the pre-established limits, (50)–(52), that objective function or its equivalent (fitness) for each provide the desired damping, is considered a solu- individual. In this step, the evaluation of individuals, tion to the problem, see Table 1.
10 International Transactions on Electrical Energy Systems x1 x3 x1 x3 P1 P1′ x2 b2 b2 x2 P2 P2′ b1 b3 b1 b3 Figure 7: Two-point crossover. 5.2. Particle Swarm Optimization. Initially consider a search Table 1: Parameters for the evaluation of the objective function. space of dimension nv. Suppose that each particle i, in the search space, can be represented according to its current [1.5pt] ξ des − tol (p.u.) ωloc ni (Hz) ωinter n (Hz) i,pso i,pso position xi,pso (t) [x1 (t), . . . , xnv (t)] and a velocity Min. 0.80 Min. 0.50 i,pso i,pso i,pso 0.145 v (t) [v1 (t), . . . , vnv (t)]. During the iterative pro- Max. 1.40 Max. 0.70 cess, at each step t, the current position of each particle is measured using an objective function according to (53)–(55). From the analysis of the evaluation function, it is 5.3. Mayfly Optimization Algorithm. As stated before, the verified, at each iteration t, if the position of the particle at MOA is an optimization algorithm proposed by [30] in 2020, iteration t is better than the other positions previously based on concepts from the PSO algorithm, the GA, and the verified. If so, the position of this particle is stored in a vector FA. Initially, two sets of mayflies are randomly generated, i,pso i,pso i,pso pbest (t) [pbest (t), . . . , pbest (t)]. In the course of the it- one containing a male and the other a female population. erative process, 1 at each nvbest evaluation, this vector is Suppose that each mayfly i, in the search space, can be updated. Finally, the best-found position measured by the randomly represented by a nv-dimensional vector i,pso evaluation function stored in pbest (t) is stored in another xi,moa (t) [xi,moa 1 (t), . . . , xi,moa nv (t)] and by a velocity pso vector called gbest (t). vi,moa (t) [vi,moa 1 (t), . . . , v i,moa nv (t)]. During the iterative In the PSO algorithm, what determines the motion of a process, at each iteration t, the current position of each given particle i at step (t + 1) is its velocity vi,pso (t) calcu- mayfly is measured using an evaluation function, according lated in the following equation: to (53)–(55). From the analysis of the evaluation function, at each iteration t, each mayfly adjusts its trajectory toward its vi,pso (t + 1) wvi,pso (t) + C1 r1 coi (t) + C2 r2 soi (t), (35) personal best position, pi,moa i,moa i,moa best (t) [pbest (t), . . . , pbest (t)]. In the course of the iterative process, when a better candidate 1 nv where r1 and r2 are random values over the interval solution is found, this vector is updated. Finally, at each [0, 1], C1 and C2 are called acceleration constants and are iteration, the best-found position measured by the evalua- responsible, respectively, for weighting the cognitive tion function stored in pi,moa best (t) is stored in another vector, factor, coi (t), and the social factor, soi (t). Furthermore, gmoa (t). best w wmax − wmin /tmax t is known as the inertia factor and is meant to control the impact of velocities on the particles of the PSO algorithm and tmax is the maximum number of 5.3.1. Movement of Male Mayflies. Assuming that xi,moa (t) is iterations [42]. the current position of the male mayfly i in the search space The cognitive and social factors, shown in (35), are at iteration t, its position is changed by adding a velocity represented by the following equations: viml (t + 1) to the current position, according to following i,pso equation: coi (t) pbest (t) − xi,pso (t), (36) xi,moa (t + 1) xi,moa (t) + vi,moa ml (t + 1), (39) i pso i,pso so (t) gbest (t) −x (t), (37) where vi,moa (t+)1 is given according to the following th i where the i cognitive factor, co (t), is related to each of the equation: individuals in the ith best position pibest (t), the social factor, vi,moa i,moa 2 co (t) + C2 e− βrg soi (t), −βrp i 2 ml (t + 1) gv ml (t) + C1 e soi (t), is related to the best position found among all in- dividuals in the swarm gbest (t) and xi,pso (t) is the position (40) vector of the ith particle at iteration t. At iteration (t + 1), the where C1 and C2 can be defined as in (35), g is called the position of the ith particle, xi,pso (t + 1), is updated according gravity coefficient and has values determined in the interval to the following equation: (0, 1], while coi (t) and soi (t) were addressed, respectively, xi,pso (t + 1) xi,pso (t) + vi,pso (t + 1). (38) in (36) and (37). Finally, β is called the visibility coefficient and has its value determined empirically, while rp and rg are,
International Transactions on Electrical Energy Systems 11 respectively, the calculated cartesian distance from xi,moa (t) installed in the power system shown in (50)–(52) and ρ1 is to pibest (t) and between xi,moa (t) and gbest (t) according to the calibrated from values selected from the range (0, 1]. following equation: To the step that reproduces the nuptial dance, in which ���������������������� the best mayflies have to keep changing their velocities, the �� i,moa � nv following equation is presented: i,moa �� 2 ��x (t) − x (t)� � xij,moa (t) − xij,moa (t) , j�1 vi,moa i,moa ml (t + 1) � vml (t) + d · r, (43) (41) where d is the coefficient of the nuptial dance and r is a vector with random values within [−1, 1]. where x i,moa (t) � pi,moa or x best (t) i,moa (t) � gmoa best (t). The velocity control, shown in (40), of each mayfly in the MOA is performed according to the following equation: 5.3.2. Movement of Female Mayflies. Assuming that yi,moa (t) is the current position of the female mayfly i in the search ⎨ vmax ⎧ i,moa max ml , if vml (t + 1) > vml , space, at iteration t, its position is changed by adding a vi,moa ml (t + 1) � ⎩ (42) ρ2 vmax i max velocity vi,moa (t + 1) according to the following equation: ml , if vml (t + 1) < ρ2 vml , where ρ2 is an empirically fixed random value, yi (t + 1) � yi (t) + vi,moa fml (t + 1), (44) vmax � ρ1 (xmax − xmin ), in which xmax and xmin are the upper where vifml (t + 1) is determined using the following and lower bounds of the control parameters of the devices equation: 2 ⎪ ⎧ ⎪ ⎪ gvi,moa fml (t) + C3 e −βrmf x i,moa (t) − yi (t) , ⎨ vi,moa fml (t + 1) � ⎪ if male dominates female , (45) ⎪ ⎪ ⎩ i,moa gvfml (t) + fl(t) · r, otherwise where fl(t) is a random walk coefficient, rmf is the Car- reducing the dance coefficient d(t) and the random walk tesian distance between the male and female mayflies, coefficient fl(t) in each iteration as shown in the fol- formulated according to (41), and C3 is a positive attraction lowing equations: constant. d(t) � d0 δd (t), (48) 5.3.3. Mating of Mayflies. The crossover operator is used in fl(t) � fl0 δfl (t), (49) this algorithm to represent the mating process between two mayflies and is used as follows: the best female crosses with where at each iteration t of the optimization problem, δd (t) the best male, the second-best female with the second-best and δd (t) take fixed values in the interval (0, 1). male, and so on. The results obtained after these crosses are two offspring generated according to the following equations: 6. Problem Formulation offspring1 � L · male +(1 − L) · female, (46) All algorithms are implemented considering an initial population consisting of 20 individuals. Each individual is a nv-dimensional vector of variables, this quantity being de- offspring2 � L · female +(1 − L) · male, (47) termined by the number of parameters of PI, PSSs, and the where male is the male parent, female is the female parent, SSSC-POD controllers installed in the power system. Each and L is a random value within a certain interval. The initial variable in an individual of the optimization problem in all velocities of the offspring are set to zero. the algorithms must satisfy the bounds shown in the fol- lowing equations: pss pss 5.3.4. Reduction of the Nuptial Dance and Random Walk 0.10 ≤ T1r ≤ 1.25; 0.01 ≤ T2r ≤ 0.20; 1.00 ≤ Kpss r ≤ 10.00, Coefficients. The nuptial dance performed by male may- (50) flies represented by the coefficient d(t), as well as the random walk performed by females, are based on local pod pod searches shown in (43) and (45). However, random flights 0.10 ≤ T1 ≤ 0.40; 0.10 ≤ T2 ≤ 0.40; 0.10 ≤ Kpod ≤ 0.50, can produce poor results during a random exploration. (51) This problem occurs from the fact that the nuptial dance pi pi pi pi d(t) or random walk fl(t) coefficients usually assume 0.001 ≤ T1 � T2 ≤ 0.90; 0.001 ≤ K1 � K2 ≤ 1.00, (52) large initial values. This can be mitigated by gradually
12 International Transactions on Electrical Energy Systems PI POD PSSs pi pi pi pi pod pod pss pss pss pss pss pss zj = T1 = T2 K1 = K2 T1 T2 Kpod T1 T2 K1 T1 T2 K9 1 1 9 9 Figure 8: Representation of a solution proposal. where the units of the time constants and gains of the jωi controllers are, respectively, seconds and p.u., while r � 1, . . . , 9. ωmax ni The ith individual of a given population (zi ), is shown in ξicalc ≥ ξides − tol ωnimin ≤ ωni ≤ ωnimax Figure 8. As it will be justified in Section 6, the simulations ωmin λi = σi + jωi ni will be performed using the New England system (see [17]) and the system will be equipped with one PI controller, an σi SSSC-POD, and nine PSSs, totaling 32 variables, i.e., nv � 32. Moreover, tests will also be conducted using the two-area symmetrical system equipped with one PI controller, an SSSC-POD, and two PSSs, totaling 11 λi = σi - jωi variables, i.e., nv � 11. The objective function of the problem is defined in the following equations for all algorithms: Figure 9: Desired location for the eigenvalues of interest. n F1 zi � Δξ q , (53) q�1 7.1. New England System. To validate the models and op- timization algorithms presented in this work, small-signal n stability simulations will be carried out using the New F2 zi � Δωq , (54) England system whose complete data is available in [17]. q�1 This is a multimachine system composed of 10 generators, 40 buses, and 47 transmission lines, already accounting for one minimize F zi � η1 F1 zi + η2 F2 zi . (55) new line (38− FB) and one new bus (FB, between buses 37 − 38), included to perform simulations with the SSSC, as where n is the number of eigenvalues present in the power can be analyzed in Figure 10. system, η1 � η2 � 1, Δξ q � |ξ des − ξ calc q | and For the simulations, the algorithms were calibrated Δ ωq � |ω − ωq |, in which ξ des and ξ calc des calc q are, respec- according to data shown in Table 2, considering the set of tively, the desired and calculated damping of the qth ei- bounds shown in (50)–(52). genvalue of interest of the power system, while ωdes and The presentation of the results is organized in two cases: ωcalc q are, respectively, the desired and calculated fre- first, a static analysis is performed, and second, a dynamic quency of the qth eigenvalue of interest of the power analysis is conducted. In the first case, the objective is to system. validate the proposed formulation for the power flow The settings provided to the control parameters by the modeled by current injections for the SSSC. The second case algorithms to the PSSs, the SSSC-POD, and PI controllers is subdivided into two parts: in the first part, a statistical must ensure the minimum desired damping for all poles of analysis is performed considering the results of the three interest of the power system as well as that the oscillation simulated optimization techniques (GA, PSO algorithm, and frequencies of all existing poles remain within predefined MOA) in order to determine which of the three algorithms design ranges, as shown in Figure 9. best applies to the discussed problem; second, an analysis In Figure 9, σ i and ωi are, respectively, the real and focused on small-signal stability using the New England imaginary parts of the ith eigenvalue λi � σ i ± jωi . With the system is performed. The proposed models and optimization bounds given in (50)–(52), the objective function of a so- algorithms were implemented in MATLAB R2019a using a lution, shown in (55), should satisfy the constraints defined in the project, as shown in Table 1. ® computer with a 3.19 GHz Intel Core i7-8700 processor and 16 GB of RAM. ™ In Table 1, ωloc ni is related to the oscillation frequency of local modes, while ωinter n is associated with the interarea pod pss pi pod mode. Finally, Tω � Tω � 1 s, while Tm � Tm � 0.001 s 7.1.1. Static Analysis. Initially, it can be seen that the SSSC are prespecified. was installed between buses 37 − 38. The reasons for in- stalling the device at this location are: first, the installation 7. Simulations and Results of the SSSC should occur at locations close to the buses that presented voltage magnitudes below 0.95 p.u. This Section presents the results of simulations performed According to Figure 11, the buses with voltage magnitudes using the New England system [17] and the two-area below 0.95 p.u. are 12, 36, and 37 (0.9491 p.u., 0.9486 p.u., symmetrical system [1]. and 0.9475 p.u.) and are close to the site chosen for SSSC
International Transactions on Electrical Energy Systems 13 G8 Area 2 G1 ∼ Area 1 ∼ 8 28 29 1 25 26 9 27 24 ∼ G9 18 17 31 32 16 G6 ∼ 30 15 6 10 33 21 ∼ 34 14 19 22 G10 23 37 35 12 20 2 13 5 7 11 ∼ ∼ ∼ 39 4 G2 G5 G7 36 3 ∼ VSC FB G4 ∼ G3 38 Figure 10: Single-line diagram of the New England system with one SSSC. Table 2: Parameters of the algorithms. Search Engine Structure Parameters of the Algorithm Parameters of the Simulations Fitness Function Roulette selection: — Two-point crossover 10% probability rate GA Mutation (23% of the value): 10% probability rate best individual Elitism: C1 � 2.55 Population size: 20 C2 � 1.55 Formulation Stopping criterion: Table 1 PSO wmax � 0.89 (55) (35)–(38) Max. number of iterations: wmin � 0.0025 2000 tmax � 2000 g � 0.851 C1 � 1.99, C2 � 2.00 Formulation C3 � 2.50, β � 2.00 MOA (39)–(48) ρ1 � 0.10, ρ2 � −1.10 d0 � 950, δtd � 0.9999 fl0 � 1.50, δtfl � 0.99 1.04 1.03 Voltage Magnitude (p.u.) 1.02 1.01 1.00 0.99 0.98 0.97 0.96 0.95 0.94 5 10 15 20 25 30 35 40 Bus Case I Case II Figure 11: Voltage profiles for the New England system.
14 International Transactions on Electrical Energy Systems installation; second, the location should allow for the control- Table 3: Variables of the SSSC’s control structure of the new lability and observability over the interarea mode present in the England system. power system. Indeed, according to Figure 10, buses 38 and 37 SSSC Vp Vq are characterized by being located near to Area 1 (New York − 07 Case I −7.11283 × 10 2.78607 × 10− 08 system that is represented by the equivalent bus 10). It is known Case II −0.0155367 −0.0150003 in the literature that interconnection areas favor the emergence of interarea oscillatory modes. Case I will represent the situation in which the New England system is equipped with an SSSC, but the device Subsection 7.1.1, a dynamic analysis involving the SSSC, PI does not control the active and reactive power flows in the controllers, and supplementary damping controllers (PSS line in which it is installed, and Case II will represent the case and POD), will be performed. In Table 4, the eigenvalues of in which the SSSC controls the active and reactive power interest of the New England system are presented before flows. For the first case, Pctrl m � −15.96 MW and (Case I) and after (Case II) the actuation of the SSSC in the Qctrl ctrl m � −111.27 MVAr and, for Case II, Pm � −25.00 MW control of the active and reactive power flows. ctrl and Qm � −125.00 MVAr. In both cases, for simulation By analyzing the frequencies, ωni � |λi |/2π, of the modes purposes, the coupling reactance of the transformer, xkm , of interest, λi � σ i ± jωi , shown in Table 4, it can be con- connecting the VSC to the transmission line (positioned cluded that the New England system is characterized by the between buses 38 and FB) is equal to 0.01 p.u. presence of eight local modes, λ1 and λ8 , and one interarea In Figure 11, the voltage profiles before (Case I) and after mode, λ9 . In both Case I and Case II, the system is unstable. (Case II) the SSSC actuation for controlling the active and In Case I, the instability of the system is caused by four reactive power flows are shown. oscillatory modes with positive real parts, λ1 , λ4 , λ8 , and λ9 , By analyzing Figure 11, it can be seen that before the while in Case II, the instability of the system is caused by control of the active and reactive power flows performed by the three oscillatory modes with positive real parts, λ1 , λ4 , and SSSC (Case I), the system had voltage problems at buses 12 λ8 . Importantly, the interarea mode in Case I has negative (0.9491 p.u.), 36 (0.9486 p.u.), and 37 (0.9475 p.u.). However, damping, of −0.0010 p.u., and, in Case II, after the control of the same cannot be said for Case II. After controlling the flows, the active and reactive power flows by the SSSC, this mode the voltage profiles were adjusted, being equal to 0.9505 p.u. for changes from unstable to stable with damping of 0.0234 p.u. bus 12, 0.9513 p.u. for bus 36, and 0.9506 p.u. for bus 37. The inclusion of the SSSC dynamics in the CSM and the In Table 3, the values of the SSSC control variables, Vp correct control of the active and reactive power flows per- and Vq , are presented. formed by this device in the New England system provided When analyzing Table 3, it is possible to verify that the improvements in the voltage profile of the system (see values of Vp and Vq are close to zero for Case I, demonstrating Figure 11) as well as small damping increments in some that the SSSC is included in the system, but it is not actuating. poles of interest of the system. In fact, it is possible to verify In relation to Case II, it can be seen that after the SSSC has that in Case II, for the considered operation point, the New actuated to control the active and reactive power flows, the England system started to operate with three poles re- values of the control variables are different from zero, which sponsible for the system instability, one less when compared corroborates the SSSC’s actuation in the New England system. to Case I (see Table 4). Due to these observations, Case II, Finally, in Figure 12, the active and reactive power flows, from this point on, will be used as the base case in the generations, loads, and the power injections performed by following simulations. the SSSC, for the buses and lines near to the installation site of the SSSC, are presented. The results for Case I are rep- (1) Statistical Analyses of the Performances of the Algorithms. resented in Figure 12(a) while the results for Case II are Initially, an SSSC-POD installed in the system according shown in Figure 12(b). with the arguments presented in Subsection 7.1.1 and nine By analyzing Figure 12, it is possible to verify that, in both PSSs coupled to generators G1 to G9 are considered. cases, the control of the power flows is performed according to The parameter tuning of the PI and supplementary what was established for Cases I and II. It is important to highlight damping controllers, PSSs and POD, for Case II, is per- that, in Case II, in order to control the flows specified in the project formed using the PSO algorithm, GA, and MOA, and these (Pctrl ctrl m � −25.00 MW and Qm � −125.00 MVAr) for improving are calibrated based on the data provided in Table 2. In this the voltage magnitudes at buses 12, 36, and 37, the SSSC needed to first scenario, one hundred tests limited to two thousand inject at buses 37 and FB, respectively, 147.70 MW and 142.60 iterations in each one are performed. Under these condi- MVAr, and −149.38 MW and −140.30 MVAr. Finally, it is tions, the values given in Table 1 should be checked. The possible to perform the nodal balance of active and reactive results of these simulations can be verified in Table 5. powers at the buses indicated in Figure 12 and thus validate the When analyzing the results presented in Table 5, it is control of the power flows performed by the SSSC. possible to make the following comments: (i) the MOA achieved success in 100% of the tests performed, against 91% of GA and 87% of PSO algorithm; (ii) both in average or 7.1.2. Dynamic Analysis. After validating the current in- when the maximum and minimum numbers of iterations are jections model for the SSSC and confirming its ability to compared, it is possible to observe that the MOA was more manage the active and reactive power flows, as shown in efficient than the other two optimization algorithms; (iii)
International Transactions on Electrical Energy Systems 15 0.9569∠ − 8.89° (p.u.) 0.9589∠ − 8.90° (p.u.) 34 34 56.09 MVAr 317.46 MW 47.28 MVAr 313.17 MW 147.70 MW 142.60 MVAr 56.66 MVAr 48.43 MVAr 316.56 MW 312.29 MW 0.9475∠ − 11.10° (p.u.) 0.9603∠ − 8.13° (p.u.) 0.9506∠ − 11.07° (p.u.) 0.9622∠ − 8.14° (p.u.) 37 35 35 37 96.93 MVAr 423.88 MW 88.84 MVAr 420.74 MW 17.04 MVAr 124.38 MW 109.90 MVAr 189.48 MW 15.96 MW 9.44 MVAr 186.39 MW 2.00 MVAr 522 + j176 MVA 522 + j176 MVA 48.60 MVAr 129.73 MW 1.00∠ − 11.12° (p.u.) 88.26 MVAr 422.64 MW 80.71 MVAr 49.65 MVAr 3.29 MVAr 1.00∠ − 10.56° (p.u.) 1000 + j177.12 MVA 120.60 MW 419.54 MW 189.64 MW 4.26 MVAr 186.54 MW 1000 + j159.62 MVA ∼ 10 ∼ 36 36 111.27 MVAr 10 G10 15.96 MW 0.9487∠ − 10.55° (p.u.) 25.33 MW G10 0.9514∠ − 10.53° (p.u.) 24.28 MVAr 124.38 MW 15.29 MVAr 233 + j84 MVA VSC 16.20 MW FB 233 + j84 MVA 40.73 MVAr 0.9591∠ − 11.00° (p.u.) 1104.40 + j250 MVA 111.27 MVAr 15.96 MW 1104.40+ j250 MVA FB 0.9500∠ − 11.86° (p.u.) 78.51 MVAr 149.38 MW 140.30 MVAr 16.18 MW 94.14 MVAr 25.31 MW 78.51 MVAr 16.18 MW 94.14 MVAr 25.31 MW 38 38 0.9950∠ − 1.78° (p.u.) 0.9908∠ − 11.46° (p.u.) Case I Case II Case II SSSC SSSC Load Load (a) (b) Figure 12: Control of the active and reactive power flows performed by the SSSC in the New England system. Table 4: Dominant eigenvalues, damping coefficients, and natural undamped frequencies of the New England system. Case I Case II Mode Eigenvalues ξ i (p.u.) ωni (Hz) Eigenvalues ξ i (p.u.) ωni (Hz) λ1 0.0729 ± j6.8461 −0.0106 1.0897 0.0767 ± j6.8448 −0.0112 1.0894 λ2 −0.2064 ± j7.2348 0.0285 1.1519 −0.2052 ± j7.2335 0.0284 1.1517 λ3 −0.1903 ± j8.2731 0.0230 1.3171 −0.1880 ± j8.2725 0.0227 1.3169 λ4 0.1799 ± j5.9142 −0.0304 0.9417 0.1745 ± j5.9090 −0.0295 0.9409 λ5 −0.1291 ± j6.4968 0.0199 1.0342 −0.1245 ± j6.4829 0.0192 1.0320 λ6 −0.2690 ± j8.1071 0.0332 1.2910 −0.2687 ± j8.1059 0.0331 1.2908 λ7 −0.2413 ± j8.3204 0.0290 1.3248 −0.2412 ± j8.3187 0.0290 1.3245 λ8 0.1622 ± j6.3862 −0.0254 1.0167 0.1587 ± j6.3764 −0.0249 1.0152 λ9 0.0037 ± j3.5625 −0.0010 0.5670 −0.0812 ± j3.4638 0.0234 0.5514 finally, when the convergence times of the algorithms were the results presented in Table 5, the radar plot of the three compared, again the MOA had better performance than the simulated algorithms is shown in Figure 13. In it, the ob- others, being the best in the average, minimum, and max- served results for four quantitative variables obtained in the imum times observed. one hundred simulated tests are presented: time, numbers of The results analyzed so far would already allow saying iterations, minimum damping, and the smallest values that the MOA is the most efficient algorithm for tuning the found for the objective function for each simulated test. parameters of the controllers for small-signal stability im- It is clear from Figure 13 that the radar plot for the MOA provement, and therefore, would allow accrediting it as a is the one that presents the best results. It is possible to powerful tool in this type of study. However, to corroborate observe that the respective curves presented for the MOA
You can also read