Kyle J. Horn - DSpace@MIT
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Adaptive Oxygen Production of the Mars Oxygen ISRU Experiment (MOXIE) though Feedback Control of Pressure Sensor 4 by Kyle J. Horn B.S.E., Arizona State University (2021) Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics and Astronautics at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY February 2023 © Massachusetts Institute of Technology 2023. All rights reserved. Author . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Kyle J. Horn Department of Aeronautics and Astronautics February 1, 2023 Certified by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Jeffery A. Hoffman Professor of the Practice of Aerospace Engineering Thesis Supervisor Accepted by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Jonathan P. How R.C. Maclaurin Professor of Aeronautics and Astronautics Chair, Graduate Program Committee
2

Adaptive Oxygen Production of the Mars Oxygen ISRU Experiment (MOXIE) though Feedback Control of Pressure Sensor 4 by Kyle J. Horn Submitted to the Department of Aeronautics and Astronautics on February 1, 2023, in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics and Astronautics Abstract The Mars Oxygen ISRU Experiment (MOXIE) has demonstrated the ability of a system to produce Oxygen on the surface of Mars by means of Solid Oxide Elec- trolysis from atmospheric Carbon Dioxide. This work builds on the mission goals of MOXIE, which runs only intermittently and with much manual planning for each run, to develop control algorithms that will lay the foundation for fully autonomous and continuous functionality of future systems. Through modeling and experimen- tation on the MOXIE FlatSat system at MIT Haystack Observatory, the robustness of the pressure sensor feedback control loop was validated. The maximum Oxygen production rate achieved during the investigation was 6.07 grams per hour. Thesis Supervisor: Jeffery A. Hoffman Title: Professor of the Practice of Aerospace Engineering 3

4

Acknowledgments The work done in this thesis was supported by the National Science Foundation Graduate Research Fellowship Program and the Arthur Gelb Fellowship, as well as the staff of the Human Systems Lab, MIT Haystack Observatory, and NASA Jet Propulsion Laboratory. Past work done on MOXIE by members of the MOXIE team across the country and globe have enabled this research to push the boundary of our ability with MOXIE. Support from Parker Steen and Michael Hecht at MIT Haysatck Observatory, Asad Aboobaker and Donald Rapp on the MOXIE team, and Andy Liu and Shravan Hariharan from MIT Human Systems Lab was critical for the success of this work - my sincerest gratitude for their support during this project. The guidance and direction from my thesis advisor, Professor Jeff Hoffman, was invaluable during the course of this research. I am thankful for his dedication and investment into both my success and the success of the MOXIE mission. Finally, I would like to thank my friends and family for their support and encouragement of my dreams and ambitions at MIT and beyond. 5
6
Contents 1 Introduction 15 1.1 Oxygen on Mars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.2 What is ISRU? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.3 The Mars Oxygen ISRU Experiment . . . . . . . . . . . . . . . . . . 16 1.4 MOXIE Goals and Functionality . . . . . . . . . . . . . . . . . . . . . 18 2 Pressure Sensor 4 Control 19 2.1 P4 Measurements and Dependencies . . . . . . . . . . . . . . . . . . 19 2.2 How to Control P4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 2.3 Motivation to Control P4 . . . . . . . . . . . . . . . . . . . . . . . . . 23 3 Modeling 25 3.1 Modeling Scope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 3.2 Physical Relationships for P4 . . . . . . . . . . . . . . . . . . . . . . 26 3.3 Simulated Control Response . . . . . . . . . . . . . . . . . . . . . . . 36 3.4 Flight Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 4 Experimental Definition 39 4.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 4.2 FlatSat Lab Environment . . . . . . . . . . . . . . . . . . . . . . . . 40 4.3 FlatSat Cold Flow Experiments . . . . . . . . . . . . . . . . . . . . . 42 4.3.1 SOXE Bypass Test . . . . . . . . . . . . . . . . . . . . . . . . 43 4.3.2 P4 Commissioning Tests . . . . . . . . . . . . . . . . . . . . . 44 7
4.4 FlatSat Operational Cycle 06 . . . . . . . . . . . . . . . . . . . . . . 45 5 Results and Discussion 49 5.1 P4 Commissioning Tests . . . . . . . . . . . . . . . . . . . . . . . . . 49 5.1.1 Results Overview . . . . . . . . . . . . . . . . . . . . . . . . . 49 5.1.2 Model Performance . . . . . . . . . . . . . . . . . . . . . . . . 55 5.1.3 Control System Performance . . . . . . . . . . . . . . . . . . . 58 5.2 FlatSat Operational Cycle 06 . . . . . . . . . . . . . . . . . . . . . . 62 5.2.1 Results Overview . . . . . . . . . . . . . . . . . . . . . . . . . 62 5.2.2 Model Performance . . . . . . . . . . . . . . . . . . . . . . . . 67 5.2.3 Oxygen Production . . . . . . . . . . . . . . . . . . . . . . . . 69 6 Conclusions and Future Work 73 8
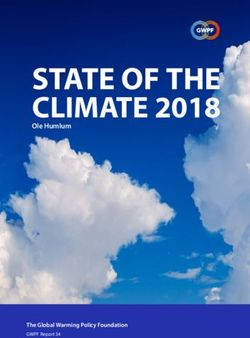
List of Figures 1-1 Cutaway of the MOXIE Flight Model currently onboard NASA JPLs Mars Perseverance Rover. Subsystems of the compressor, motor, and solid oxide electrolysis assembly are labeled and shown [3]. . . . . . . 16 1-2 Cross-section of a single cell from the Solid Oxide Electrolysis (SOXE) stack assembly [3]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 2-1 MOXIE Flow Schematics for Pressure Sensor 4 (P4). P4 is located downstream of the cathode composition sensors and upstream of the cathode VFCDs. Note that the anode exhaust line is not shown in full detail since it is irrelevant to P4 control. . . . . . . . . . . . . . . . . 20 2-2 MOXIE P4 Control Basic Theoretical Diagram. . . . . . . . . . . . . 22 2-3 MOXIE P4 Control Detailed Diagram [5]. . . . . . . . . . . . . . . . 22 2-4 Concept of Operations for a future Mars settlement with a scaled-up ISRU plant fueling the Mars Ascent Vehicle. Image courtesy of NASA Glenn Research center. . . . . . . . . . . . . . . . . . . . . . . . . . . 24 3-1 MEDA Instrument Temperature Sensor (TS) locations on the Mars Perseverance Rover. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 3-2 Simplified linear fit for Mars atmospheric density during FMOC 09 run. 28 3-3 Post-processed Training Dataset. From top to bottom, P4, RPM, Cur- rent, Density are shown for five sample runs. . . . . . . . . . . . . . . 29 3-4 Post-processed Validation Dataset. From top to bottom, P4, RPM, Current, Density are shown for four sample runs. . . . . . . . . . . . 30 9
3-5 Regression fits for P4 readings as a function of only motor RPM. Note that the slope of each line varies by as much as 30% which is largely attributed to variations in Mars atmospheric density from run to run. 31 3-6 Regression for P4 as a function of motor RPM times ambient density. 31 3-7 Optimization of RPM exponential parameter, n, with optimized value at 0.6566 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 3-8 Optimization of density exponential parameter, m, with optimized value at 0.5394 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 3-9 Regression for P4 as a function of motor RPM and ambient density. . 33 3-10 P4 Model as a function of RPM, Density, and Current. Note: there are large errors (12%) only in the midsol FM runs. . . . . . . . . . . 34 3-11 Final physical relationships model for P4 as a function of RPM, Den- sity, Current, and Run LMST. The average error for the training dataset is 2.05% and the average error for the validation dataset is 2.23%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 3-12 Model response of P4 control. Pressure response (Top Left), RPM Re- sponse (Top Right), Error Response (Bottom Left), Mars Atmospheric Density Profile (Bottom Right 1), and Commanded Current (Bottom Right 2) are shown for the given run. An RPM bias of 0, of 1000, of 5,000/5, and upper/lower RPM limits of 3500/500 were used in a run profile with several pressure and current setpoints . . . . . . . . 37 4-1 FlatSat Lab configuration with FS vacuum chamber details shown. The fluid path begins with the pressurized gas cylinders on the left and ends with the vacuum pumps exhausting on the right. In this diagram, the FlatSat is in compressor feed configuration. Image courtesy of MIT Haystack Observatory. . . . . . . . . . . . . . . . . . . . . . . . . . . 41 10
4-2 P4 Pressure Setpoints and FS Chamber Density Setpoints used in the P4 control cold flow experiments. The SOXE stack heaters remain off and the SOXE stack currents remain at 0A since the cold flow tests did not attempt to produce oxygen. . . . . . . . . . . . . . . . . . . . 43 4-3 FlatSat System configuration for the SOXE Bypass cold flow experi- ment. In the Figure, the length of nylon tubing inserted between the compressor outlet and the CS1 inlet is shown in red. . . . . . . . . . . 44 4-4 FlatSat System configuration in compressor feed for the cold flow P4 commissioning tests. . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 4-5 P4 Pressure Setpoints, FS Chamber Density Setpoints, and desired SOXE current used in the P4 control FlatSat Operational Cycle 06 experiment. The SOXE stack heaters were set to approximately 840 C. 47 5-1 Run Overview for P4 Commissioning Test A with gains of = = 1000 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 5-2 Run Overview for P4 Commissioning Test B with gains of = = 1500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 5-3 Run Overview for P4 Commissioning Test C with gains of = = 500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 5-4 Run Overview for P4 Commissioning Test D with gains of = = 1000 and an offset of 500 applied for the first 5 seconds of the run. Since the remaining RCT is identical to Run A, the Run was concluded after the controller achieved a steady state performance. . . . . . . . . . . 53 5-5 Density profile and actual FlatSat chamber density during P4 commis- sioning Run C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 5-6 Comparison of P4 control response with predicted P4 control response and P4 setpoints. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 5-7 Comparison of observed RPM and predicted RPM from model. . . . 56 5-8 Comparison of P4 controller error for varying gains and offsets. . . . . 58 11
5-9 Comparison of P4 control Rise times and overshoots for varying gains and offsets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59 5-10 Composite Graph of FS OC06. . . . . . . . . . . . . . . . . . . . . . 62 5-11 Total mass flow rate of gas into the SOXE inlet. . . . . . . . . . . . . 63 5-12 Comparison of FlatSat chamber density with density setpoints for FS OC06 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65 5-13 Comparison of measured current through the SOXE stack with desired current. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66 5-14 Pressure response of P4 during FSOC06 with model for comparison. . 67 5-15 Comparison of observed and modeled rise time for FS OC06. . . . . . 68 5-16 Comparison of observed and modeled rise time for FS OC06 after ad- justing for the 2 second controller lag. . . . . . . . . . . . . . . . . . . 69 5-17 Oxygen mass flow rate from SOXE anode during FSOC06. Oxygen mass flow is determined from the measured current through the SOXE stack. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 5-18 Chamber Density and RPM shown with Oxygen mass flow rate . . . 71 5-19 Chamber Density and RPM shown with Anode Pressure. . . . . . . . 72 12
List of Tables 2.1 P4 Controller Nomenclature . . . . . . . . . . . . . . . . . . . . . . . 23 3.1 FM Run Density Profiles . . . . . . . . . . . . . . . . . . . . . . . . . 28 3.2 Model Parameter Final Values . . . . . . . . . . . . . . . . . . . . . . 33 3.3 Run Parameters for P4 Control Response Model . . . . . . . . . . . . 37 4.1 P4 Commissioning Parameters . . . . . . . . . . . . . . . . . . . . . . 45 5.1 P4 Commissioning Parameters . . . . . . . . . . . . . . . . . . . . . . 50 5.2 Time Constants and Overshoots . . . . . . . . . . . . . . . . . . . . . 60 13
14
Chapter 1 Introduction 1.1 Oxygen on Mars Humanity has long desired to explore the red planet. Since Mariner 4, the first successful flyby mission to Mars in 1965, the ability to execute a manned mission has been within our grasp. While sending spacecraft and rovers to Mars is a fairly tried-and-true process, the complexity of a mission drastically increases when the objective expands to include a return from Mars to Earth, and even more so when incorporating humans. Several technologies need to be further developed to support human-led exploratory missions to the Martian surface, one of which is ISRU (In-Situ Resource Utilization). 1.2 What is ISRU? In-situ resource utilization (ISRU) is a critical technology area for the future of human-led space exploration. With respect to aerospace, ISRU is the practice of con- suming resources at the mission destination rather than bringing them from Earth. In addition to being a sustainable practice, it yields considerable cost savings for both Lunar and Martian missions [1]. Recent analyses of crewed missions to Mars have shown that a six-person MAV would require approximately 40 tons of oxygen-methane propellant to return to Earth, 15
with over 75% of the propellant mass being allocated to Oxygen. Transporting this amount of Oxygen from Earth would require approximately 500 tons of propellant for each Mars mission [2]. This is clearly unsustainable; however, oxygen can be produced from the carbon dioxide rich Martian atmosphere and the Mars Oxygen ISRU Experiment (MOXIE) has recently demonstrated our ability to do so. 1.3 The Mars Oxygen ISRU Experiment The Mars Oxygen ISRU Experiment (MOXIE) has demonstrated the ability for a system to convert Mars atmospheric carbon dioxide into diatomic oxygen through the process of solid oxide electrolysis (SOE) [2]. This system, which is onboard NASA JPLs Mars Perseverance Rover, has produced oxygen over 10 times at rates of up to 10 grams per hour since its first oxygen-producing run in April 2021 [2]. A cutaway of the MOXIE Flight Model is shown in Figure 1-1. Figure 1-1: Cutaway of the MOXIE Flight Model currently onboard NASA JPLs Mars Perseverance Rover. Subsystems of the compressor, motor, and solid oxide electrolysis assembly are labeled and shown [3]. 16
MOXIE functions by flowing Mars atmospheric gasses through a HEPA dust fil- ter into a scroll pump, where it is compressed to roughly 1 bar. From there, the compressed gas is sent to the primary heaters and warmed to approximately 800∘ C, where the hot 2 is then sent to the Solid Oxide Electrolysis (SOXE) assembly. Each SOXE cell is composed of a porous anode, a nickel-catalyzed cathode, and a Scandia-Stabilized Zirconia (ScSZ) electrolyte, shown in detail in Figure 1-2. Figure 1-2: Cross-section of a single cell from the Solid Oxide Electrolysis (SOXE) stack assembly [3]. The hot gas enters the cathode side of the assembly where oxygen can be selectively permeated to the anode side of each cell through an applied current, given by the electrolysis relation: 2 2 + 4 − ⇒ 2 + 2 2− (1.1) The , unreacted 2 , and other inert atmospheric gasses (mostly Argon and Nitrogen) flow out the cathode side of the assembly and are then either exhausted or partially recirculated back to the compressor, and the oxygen flows out from the anode side where it is exhausted to the rover’s surroundings. It is important to note that if the applied current to the electrolysis stack exceeds a certain limit, known as the Nernst potential for carbon formation, pure carbon deposition on the cathode can 17
occur, a process called coking, which leads to drastic reductions in cell performance and generally renders the cell unusable. Operating below the Nernst Potential is critical for the safety of MOXIE [3]. 1.4 MOXIE Goals and Functionality MOXIE has two broad goals: to demonstrate that the solid oxide electrolyte oxygen extraction system will function on Mars, and to inform the design of future oxygen- producing ISRU systems. From these goals, the minimum success criteria for MOXIE to meet during its mission on Perseverance state that, in summary, MOXIE must produce at least 6 g/hr of oxygen with a purity of greater than 98% for a minimum of 10 operational cycles during all times of day and night and in all environmental conditions [3]. Many of these minimum success criteria have been achieved; MOXIE has produced oxygen during both winter and summer, at both midday and midnight, at rates exceeding 6 g/hr with the required purity, and has done so 11 times as of the drafting of this thesis [2]. While MOXIE has operated at both midday and midnight, it has not operated at dawn or dusk, which are periods of the day when the atmospheric density is rapidly changing. The reason this has yet to be attempted lies in the nature of how MOXIE executes a planned experiment. Commands for any given MOXIE run are uploaded in four files: the Run Command Table (RCT), Run Parameter Table (RPT), Algorithm Parameter Table (APT), and Safety Parameter Table (SPT). Each of these tables take static and unchanging values which are prepared in advance for the run. Since the Nernst potential for carbon production is influenced by the flow rate of gas over a SOXE cell, which is influenced by the atmospheric density, the atmospheric conditions must be predicted and taken into account for the anticipated time and date of any given run. Given the danger of carbon deposition as a result of rapidly changing density, operational cycles have been executed during times of relatively stable density. Developing the ability to safely operate during times of rapidly changing density will enable MOXIE to check off one of its important mission goals and success criteria. 18
Chapter 2 Pressure Sensor 4 Control A proposed method that would enable MOXIE to function semi-autonomously dur- ing periods of rapidly changing atmospheric density is by maintaining the flow rate inside the system through feedback control. This can be achieved by taking the mea- surements of Pressure Sensor 4 (P4) and using them to adjust the compressor motor speed to maintain a desired input gas flow rate. The idea for P4 control was con- ceived during the design and fabrication of MOXIE, and as such the software already exists within the Flight Software but it has yet to be enabled. Before enabling the P4 control algorithm on the MOXIE Flight Model, it must first be tested on the MOXIE FlatSat at MIT Haystack Observatory. 2.1 P4 Measurements and Dependencies Pressure Sensor 4 (P4) is a fully active, four-arm Wheatstone bridge Kulite pressure transducer that operates at a sampling frequency of approximately 1 Hz. It measures the pressure at the cathode VFCDs and is situated downstream from the composition sensors, shown in Figure 2-1. Since P4 is towards the end of the MOXIE fluid circuit, several factors influence its measurements. P4 is largely dependent on the mass flow rate of gas through the scroll compressor which can be characterized as a function of the compressor motor speed, the inlet density of the gas, and the composition of the gas. 19
Figure 2-1: MOXIE Flow Schematics for Pressure Sensor 4 (P4). P4 is located downstream of the cathode composition sensors and upstream of the cathode VFCDs. Note that the anode exhaust line is not shown in full detail since it is irrelevant to P4 control. The composition of gasses at P4 mainly vary with changes in the current applied to the SOXE stack (given by the electrolysis reaction in Equation 1.1) with the generation of in the cathode exhaust line. While P4 in principle should be independent of the molar flow rate (and by extension the oxygen production rate), the difference in viscosity between 2 and creates a small, but distinct, change in the pressure at P4. From this, and the assumption that the inlet gas density is similar to the ambient atmospheric density, we can simplify the dependencies of P4 to be the motor compressor speed, atmospheric density, and commanded SOXE current. It is important to note that the above simplification does not capture all underlying contributors to the measurements of P4. Hecht et al. 2020 noted that the pressure at P4 is likely dependent on the temperature of the sensor itself, but that this effect is insignificant. 20
2.2 How to Control P4 The P4 motor control algorithm is designed to vary the compressor motor speed to maintain a desired P4 setpoint through feedback control. The MOXIE Flight Software is limited in its control ability due to the nature of the FPGA and 8051 utilized in the flight hardware, and as such the highest fidelity control algorithm that can be activated is a Proportional-Integral (PI) control sequence. The use of PI control in P4 allows for a quick response to the input pressure command through the proportional term and a low steady state error from the integral term [4]. The primary relationship for the PI control response is shown to be: ∫︁ ( ) = + ( ) + ( ) (2.1) 0 Which can be rewritten for the motor control algorithm as: ∫︁ ( ) = + ( ) + ( ) (2.2) 0 Where the response variable is the motor RPM, and are the proportional and integral gains, is response measure time constant, and the error function, ( ), is defined as the difference between the pressure setpoint and the measured pressure at P4, given by: ( ) = 4, − 4 (2.3) This control sequence is better visualized in Figure 2-2. MOXIE acts as the "plant" that physically converts the input RPM signal into the output P4 signal which is fed back through the motor control algorithm to adjust the input RPM signal. This cycle continues during the activation of the motor control algorithm and acts as a robust method of maintaining a stable pressure setpoint during rapidly changing atmospheric conditions. How the flight software is configured for the motor control algorithm differs slightly from the theoretical block diagram. Figure 2-3 shows a detailed diagram that repre- 21
Figure 2-2: MOXIE P4 Control Basic Theoretical Diagram. sents the connections for P4 control both in the Flight Software (FSW) and through hardware interfaces, and Table 2.1 defines the nomenclature used in both Figure 2-3 as well as the FSW. Figure 2-3: MOXIE P4 Control Detailed Diagram [5]. As seen in Figure 2-3, there exists limiters to prevent the occurrence of error accumulation within the system and to act as a safety in case the commanded gains exceed the stability of the control algorithm. Additionally, the P4 offset term is added at the summing junction after the error function calculation, thus posing a serious consideration for system stability. Since the offset term is defined in the RCT and not APT, the value can vary during the duration of the run. Considering this, utilizing 22
Table 2.1: P4 Controller Nomenclature Parameter Description Units ZP4_SP P4 Setpoint Bar ZP4_OS Motor Speed Offset RPM ZP4_P Proportional Gain RPM/Bar ZP4_I Integral Gain RPM/(Bar*s) ZP4_H Integrator High Limit Digital Number (DN) ZP4_L Integrator Low Limit Digital Number (DN) M1_OUT Motor Output RPM a high offset at the beginning of a run to achieve the initial motor speed quickly (as opposed to letting it slowly ramp up through the control algorithm) would be beneficial if the offset is later reduced to zero. This scenario is not strictly necessary when running the motor control algorithm, but it will achieve the desired pressure setpoint considerably faster. What is not shown in Figure 2-3 is that the MOXIE "plant" occurs as a connection that links M1_OUT to P4. This distinction is important because the relation of M1_OUT to P4 is the basis for P4 control and the modeling that occurs later in this work. Activating the control algorithm is as simple as defining values for the parameters in Table 2.1 that occur in the RCT and APT of a run (when the P4 setpoints in the RCT are set to 0, the control loop is disabled). In order to determine the proper gains, offsets, and setpoints that should be utilized, extensive modeling of the P4 control algorithm was completed. 2.3 Motivation to Control P4 The eventual goal of MOXIE, and the future systems informed by the findings from MOXIE, is to produce oxygen continuously during all times of day and year. This goal requires the system to be able to adapt to large variations in atmospheric properties, most notably the atmospheric density, for the safe and optimal production of Oxygen. Fully autonomous functionality of a MOXIE-like system will enable future human- 23
led missions to Mars by continuously producing liquid oxygen at an optimal produc- tion rate, similar to the mission concept in Figure 2-4. While this control ability is beyond the limitations of the MOXIE computing subsystem, a stepping stone to true autonomy is controlling the inlet flow rate through measurements at P4. Since P4 is dependent on the inlet gas density (and by extension the ambient atmospheric density), controlling P4 will enable MOXIE to demonstrate its ability to function through extreme density changes. In principle, the ability of MOXIE to adapt to fluctuating atmospheric conditions will provide a foundation for autonomous control of the system and like-systems as a whole. Figure 2-4: Concept of Operations for a future Mars settlement with a scaled-up ISRU plant fueling the Mars Ascent Vehicle. Image courtesy of NASA Glenn Research center. 24
Chapter 3 Modeling This section covers the modeling of the MOXIE P4 motor control algorithm. The physical relationships of P4 to compressor motor speed RPM, commanded SOXE stack current, and Martian atmospheric density are modeled using a grey box tech- nique, and subsequently fed into a P4 control model designed using the MOXIE flight software code. From there, experiments were developed and validated for use on the MOXIE FlatSat. 3.1 Modeling Scope To ensure safe operations of the MOXIE Flight Model, Engineering Model and Flat- Sat, a comprehensive model of the P4 control response was created. As previously mentioned, the MOXIE FSW is limited in its control ability due to the flight hardware utilized in the onboard computing subsystem, and as such the highest fidelity control algorithm that can be activated is a PI control sequence (it is important to note that while either of the proportional or integral terms could be isolated and tested with a set gain of 0, all testing utilizes both terms for robustness of the design). The primary relationship for the PI control response is shown to be: ∫︁ ( ) = + ( ) + ( ) (3.1) 0 25
Which can be rewritten for a discrete set of RPM values in the following form: ∑︁ = + ( ) + ( )∆ (3.2) =1 Where the response variable is the motor RPM, and are the proportional and integral gains, is response measure time constant, and the error function, ( ), is defined as the difference between the pressure setpoint and the measured pressure at P4, given by: ( ) = 4, − 4 (3.3) 3.2 Physical Relationships for P4 While the P4 control response algorithm is fairly intuitive, the simulated response needs to account for the underlying physical relationships that govern how P4 changes with varying flow parameters. In order to do this, an investigation of how P4 varies with changes in the mass flow rate through the compressor ( ˙ ) was conducted. Furthermore, ˙ is heavily dependent on two driving factors, the motor speed (RPM) and the density of the inlet gasses from the ambient Mars atmosphere ( ), and is weakly dependent on the average SOXE stack current ( / , ). Thus, P4 can be thought of as a function of three inputs, given in Equation 3.4 4 = ( , , ) (3.4) Flight data from nine previous MOXIE runs was used to obtain values for P4 and RPM, / , data was collected from the Run Control Table (RCT) of each run, and the Mars Environmental Dynamics Analyzer (MEDA) instrument was used to gather information on the ambient temperature and pressure during each run. Several approximations were made to simplify the data being fed into the P4 model. The first is that that only temperature sensors (TS) TS1, TS2, and TS3 were used for data given their location (see Figure 3-1), and the three TSs were averaged 26
to create a single temperature term. Figure 3-1: MEDA Instrument Temperature Sensor (TS) locations on the Mars Per- severance Rover. From there, the pressure data was used to determine the ambient density of the Mars atmosphere using = where P is the ambient pressure, M is the molar mass of the Martian atmosphere, R is the gas constant, and T is the average temperature from TS1-3. The second approximation was made on the density profile for each run. Given the noisiness of the density data, a linear fit was used to get a simplified density trend for each run, as seen in Figure 3-2. 27
Figure 3-2: Simplified linear fit for Mars atmospheric density during FMOC 09 run. This process was repeated for each run and the density fits can be seen in Table 3.1. Table 3.1: FM Run Density Profiles Run No. Slope Intercept FMOC 09 4.59E-08 1.92E-02 FMOC 10 6.33E-08 2.00E-02 FMOC 11 -1.01E-07 1.70E-02 FMOC 12 5.06E-08 1.92E-02 FMOC 13 5.04E-08 1.86E-02 FMOC 14 7.72E-08 1.66E-02 FMOC 15 -3.19E-08 1.34E-02 FMOC 16 -1.06E-07 1.32E-02 FMOC 18 1.16E-07 2.05E-02 The simplified density profiles were used with the flight model data and the RCT commanded values to create input data for the physical relationships model. The data was cleaned and formatted into a series of training and validation datasets, where each dataset consists of four to five MOXIE FM runs. The practice of utilizing training and validation datasets is commonly seen in machine learning applications, as it enables a model to be completely defined (or 28
trained) on the training data, and then the model performance can be assessed (or validated) using the validation data. For each run, P4 is treated as the output of RPM and current as step inputs, and density as a ramp input. The individual FM runs used were concatenated to form a continuous and discrete set of values that focuses on the elements of the run where multiple parts of the MOXIE system is running in tandem (i.e. the model neglects warm-up and cool-down times). This, in addition to concatenating multiple independent runs, allows for lower computing times and a more accurate metric of the model fit to be determined. The training and validation datasets are shown in Figure 3-3 and Figure 3-4, respectively. Note that the complexity of the training data runs (Figure 3-3) is greater than the complexity of the validation runs (Figure 3-4), characterized by the variability in current and RPM input data. This selection was intentional. Selecting complex runs to be used as representative data of MOXIE operations enables the model to retain integrity when interpreting complex commands. Figure 3-3: Post-processed Training Dataset. From top to bottom, P4, RPM, Current, Density are shown for five sample runs. 29
Figure 3-4: Post-processed Validation Dataset. From top to bottom, P4, RPM, Current, Density are shown for four sample runs. Next, a series of linear regression models were constructed to determine approx- imate mathematical relationships between RPM, density, and P4. When isolating the relationship of P4 to the compressor RPM, the impact of density becomes clear. Figure 3-5 illustrates a relative change in slope of P4/RPM by approximately 30%, almost all of which is due to the run-to-run variations in atmospheric density on Mars. When P4 and density are combined to form a single term to more accurately reflect a modified version of mass flow, the relationship becomes linearly consistent, shown in Figure 3-6. From there, the outlier data can be ignored to improve the robustness of the fit parameters, and the remaining error can mostly be captured from adding a current term to model the anode re-circulation flow. 30
Figure 3-5: Regression fits for P4 readings as a function of only motor RPM. Note that the slope of each line varies by as much as 30% which is largely attributed to variations in Mars atmospheric density from run to run. Figure 3-6: Regression for P4 as a function of motor RPM times ambient density. From the findings above, in addition to using system identification techniques, a grey-box method was adopted to create the modeling structure since most of the 31
underlying physics of the system is well understood. The selected model structure is given by Equation 3.5 below, where RPM is the motor speed, is the atmospheric density, is the RCT-defined current setpoint, and , , , , , are all tunable fit parameters. (︂ )︂ 4, = ( ( * ) + ) + + (3.5) + 1 To improve the quality of the physical model, the parameters in Equation 3.5 were optimized. Starting with the exponentials in the first term, n and m, an independent tuning method was iteratively used to identify the values which maximized the 2 of the P4 regression seen in Figure 3-6. The optimization for n and m is shown in Figures 3-7 and 3-8, respectively. Figure 3-7: Optimization of RPM ex- Figure 3-8: Optimization of density ex- ponential parameter, n, with optimized ponential parameter, m, with optimized value at 0.6566 value at 0.5394 From the optimized values of n and m, the values for a and b were pulled directly from the linear fit of P4 vs * . The updated Regression is shown in Figure 3-9. 32
Figure 3-9: Regression for P4 as a function of motor RPM and ambient density. Since most of the physical relationships were captured by the density and RPM terms, the parameters c and d for the current term of the model were tuned by hand to capture the impact of current on P4. Table 3.2 shows the final fit parameters for the physical relationships model. Table 3.2: Model Parameter Final Values Parameter Value a 0.03563 b -0.1880 n 0.6566 m 0.5394 c 0.0750 d -0.0300 The updated model parameters yielded the following P4 response, shown in Figure 3-10. As seen, there are several runs where the P4 model undershoots the observed P4 data from the flight model by as much as 12%. As it turns out, the FM runs with high error are all midsol runs. This suggests the presence of an underlying relationship that was not captured in the model which is correlated to the time of day of the run (in LMST), independent from density (since the average density during the midsol run FMOC 11 is similar to that of the midnight run FMOC 14 and the P4 response 33
error is considerably lower for FMOC 14). A plausible cause for this discrepancy is the impact of gas warming that occurs through inlet tube that feeds MOXIE. Future analysis will investigate the inlet tube warming affects and should aim to quantify a relation that can be used to update the physical relationships model moving forward, but that is beyond the scope of this work. Figure 3-10: P4 Model as a function of RPM, Density, and Current. Note: there are large errors (12%) only in the midsol FM runs. To capture the inlet tube warming affect, a multiplying term, , was added to the entire model which changes based on the time of day. The updated model equation is shown to be: (︂ (︂ )︂)︂ 4, = ( ( * ) + ) + + (3.6) + 1 After the daytime run factor was incorporated, the physical relationships model performance was assessed by comparing the performance of the model on the training set (the dataset used to tune parameters) and the validation dataset of previously unseen values. This method ensures that the model is not overfitted to the data. 34
Figure 3-11 shows the final performance of the model for both training and validation data. Figure 3-11: Final physical relationships model for P4 as a function of RPM, Density, Current, and Run LMST. The average error for the training dataset is 2.05% and the average error for the validation dataset is 2.23%. The observed average error across both training and validation datasets is
P4 response to an acceptable margin of error, and thus the grey box method was adopted for further development. 3.3 Simulated Control Response Once the governing equations were defined, the control response model was created. The response model was coded based on the Flight Software (FSW) motor control algorithm for consistency and is able to incorporate multiple P4 setpoints and current setpoints during the run in addition to a variable density profile. A noise term was also added to the error of the update calculation for robustness of the control design. The pressure and current setpoints are defined in an RCT-style file, where each line specifies the commanded setpoints at a given time. From there, a time-discrete dataset of values is created at one-second intervals, similar to the sampling rate of the P4 sensor onboard MOXIE. The selected density profile is a sinusoidal approximation of the actual daily vari- ations in the density of the Mars atmosphere. Creating a model that is accurate to the density behavior of Mars is an academic investigation of itself and is impertinent to this investigation since the ability of the control algorithm to adapt to gradual, but significant, changes in ambient density is the main concern. Additionally, the timescale for density variations corresponding to a complete solar day has been re- duced to more clearly visualize the response time of the model to pressure/current setpoint changes and density changes in a concise manner. The final model is shown in Figure 3-12. For this run profile, five pressure setpoints were chosen and three current setpoints were chosen, the values of which can be seen in Table 3.3. During the pressure setpoint changes, the pressure response can be seen to achieve 63% of the new value in one time constant of 5 seconds. Additionally, current setpoint changes can be seen in the RPM response of the system, highlighting the ability of the control algorithm to maintain the desired P4 value. Lastly, the impact of the noise is clearly seen in the error response, but quickly becomes damped out in the RPM response and further reduced in the pressure response while not 36
impacting the ability of the system to maintain the desired setpoint. Table 3.3: Run Parameters for P4 Control Response Model Time P4 I 0 0.545 1.0 300 0.533 1.5 420 0.522 2.0 1380 0.533 1.5 2220 0.65 1.5 3300 0.65 2.0 3600 0.522 2.0 3720 0 0.0 Figure 3-12: Model response of P4 control. Pressure response (Top Left), RPM Response (Top Right), Error Response (Bottom Left), Mars Atmospheric Density Profile (Bottom Right 1), and Commanded Current (Bottom Right 2) are shown for the given run. An RPM bias of 0, of 1000, of 5,000/5, and upper/lower RPM limits of 3500/500 were used in a run profile with several pressure and current setpoints 37
3.4 Flight Software Activating the P4 control loop in the MOXIE Flight Software is straightforward; the Algorithm Parameters Table (APT) has designated fields for the proportional and integral gains, and minimum and maximum limits, all of which require a single specified input to run the motor control algorithm subroutine. Similarly, the Run Control Table (RCT) has variable inputs for the RPM bias and P4 set points, both of which can be changed at will throughout the run. It is important to note that the proportional gain input is simply while the integral gain input is a single term for . Additionally, the function of the minimum and maximum threshold limits serves two functions: it acts as a safety check to prevent the loop from commanding motor speeds that would potentially damage the system based on P4 readings, and it helps prevent unsafe operation due to error accumulation in the integral term of the control algorithm. It is also worth noting that the RPM bias term is not strictly necessary to run the algorithm and achieve the desired setpoint; however, it will reduce the time to achieve the setpoint. 38
Chapter 4 Experimental Definition In-house experimentation on the MOXIE FlatSat (FS) and MOXIE Engineering Model (EM) have proven the systems to be robust, reliable, and realistic tools for ex- perimentation as an analog to testing on the MOXIE Flight Model (FM). As such, the P4 control algorithm validation and testing was done solely on the MOXIE FlatSat located at the MIT Haystack Observatory. Future experimentation and validation of the MOXIE FlatSat results will be completed using both the MOXIE Engineering Model and MOXIE Flight Model; however, that is beyond the scope of this work. 4.1 Overview P4 control was tested through five cold flow runs and one hot flow run on the MOXIE FS system. Cold Flow runs utilize the flow and control parameters of the motor con- trol algorithm without heating or running current through the SOXE stack, thereby eliminating the risk of damaging the system while the control algorithm is being validated. After the cold flow runs indicated it was safe to proceed with an oxygen- producing run, or "hot flow" run, the stack and heaters were activated. Both the cold and hot flow experiments feature P4 pressure setpoints and Flat- Sat chamber density setpoints that are used to characterize the P4 motor control algorithm. It is important to note that the FlatSat chamber density was controlled by adjusting the pressure of the vacuum chamber the FlatSat system is housed in 39
through a conductance valve on the outlet of the chamber vacuum pump. The den- sity was then calculated based on the pressure of the chamber at the lab ambient temperature. The actual setpoint that controls the FS chamber density is a pressure setpoint for the FlatSat vacuum chamber; however, to avoid confusion with multiple pressure setpoints, it is referred to as a density setpoint henceforth. 4.2 FlatSat Lab Environment The FlatSat laboratory consists of four major systems: the gas delivery system, the vacuum exhaust system, the software controllers, and the FlatSat itself. The gas delivery system is composed of six compressed gas cylinders that are selectively used depending on the desired gas species. For all following experimentation, only Carbon Dioxide was used. Mass flow controllers and pressure regulators are used to achieve proper molar concentrations and flow rates for constituent gasses, which are then sent into the FlatSat chamber. Figure 4-1 shows the laboratory setup. 40
Figure 4-1: FlatSat Lab configuration with FS vacuum chamber details shown. The fluid path begins with the pressurized gas cylinders on the left and ends with the vacuum pumps exhausting on the right. In this diagram, the FlatSat is in compressor feed configuration. Image courtesy of MIT Haystack Observatory. Once the gas enters the FS vacuum chamber, it is compressed by the compressor and flows through the rest of the MOXIE FlatSat fluid circuit before being exhausted by a series of vacuum pumps in the vacuum exhaust system. Two vacuum pumps are used to pump down the cathode and anode exhaust lines, and a third vacuum pump is used with a conductance valve to maintain a desired chamber pressure setpoint. Custom LabView and Python software is used to control the lab environment and record data, while a separate software environment that emulates the Perseverance rover communicates to the FS controllers to issue commands and extract data after a given run. 41
4.3 FlatSat Cold Flow Experiments The motivation for the cold flow experiments is straightforward: validate the per- formance of the P4 motor control algorithm and validate the previously described model. The success criteria for the cold flow experiments is broken down into three factors: 1. P4 is controllable and the motor control algorithm works as intended 2. The developed control model is accurate in predicting the system response 3. The lab operating procedures enable the successful extraction of data from the FlatSat system The five cold flow tests were broken down into two experiments: the SOXE bypass experiment and the P4 commissioning experimental set. Prior to flowing cold gas through the SOXE stack with a previously untested control modality, a length of nylon tubing with an equivalent flow resistance was inserted into the fluid circuit that connected the outlet of the compressor to the inlet of Composition Sensor 1 (CS1). This setup was a risk mitigation strategy for the FlatSat SOXE unit. After the SOXE bypass experiment was completed, the P4 setpoints in the RCT, gains and limiters in the APT, and procedural steps taken for lab operations during the run were validated, and the P4 commissioning tests were executed. The general format for all of the cold flow experiments consisted of a series of changing P4 pressure setpoints while the FlatSat chamber density was held constant, followed by a series of changing FlatSat chamber density setpoints while the P4 pressure setpoint remained constant, and ending with a series of changes to both the FlatSat chamber density setpoints and P4 pressure setpoints simultaneously. Since these experiments are all cold flows, the SOXE heaters and commanded currents remain unused. The inputs for the Pressure and Density steps can be seen in Figure 4-2. 42
Figure 4-2: P4 Pressure Setpoints and FS Chamber Density Setpoints used in the P4 control cold flow experiments. The SOXE stack heaters remain off and the SOXE stack currents remain at 0A since the cold flow tests did not attempt to produce oxygen. 4.3.1 SOXE Bypass Test To reduce the risk of damaging the SOXE stack, a cold flow run was performed without the SOXE in the fluid circuit. The run featured a twenty-foot length of nylon tubing that connected the outlet of the scroll compressor to the inlet of CS1, shown in Figure 4-3, to replicate the fluid path resistance of the SOXE and dampen 43
the oscillations P4 would experience from the cyclic behavior of the compressor. The run was successful but the data was lost due to a procedural error that involved the data file generation from the rover emulator. An effort was made to recover the data, and the data that was recovered informed the updates made to both the procedures and gain calculations. This procedural error was fixed by power cycling the rover emulator between runs and was implemented on the P4 Commissioning Tests. Figure 4-3: FlatSat System configuration for the SOXE Bypass cold flow experiment. In the Figure, the length of nylon tubing inserted between the compressor outlet and the CS1 inlet is shown in red. 4.3.2 P4 Commissioning Tests After validating that the run parameters and algorithm parameters worked as in- tended in the SOXE bypass test from the recovered data, a set of tests was developed to investigate and characterize the control response of the FlatSat system when imple- menting the motor control algorithm. The FlatSat returned to a standard "Compres- sor Feed" configuration, and the SOXE stack was reintegrated into the fluid circuit, as shown in Figure 4-4. 44
Figure 4-4: FlatSat System configuration in compressor feed for the cold flow P4 commissioning tests. The P4 commissioning tests consisted of four experimental runs, each with the same set of desired P4 pressure setpoints and chamber density setpoints but with varying gains and offsets. Table 4.1 shows a breakdown of the gains and offsets used in each run, labeled A-D, that was used. Table 4.1: P4 Commissioning Parameters Run Proportional Gain K Integral Gain K Offset A 1000 1000 0 B 1500 1500 0 C 500 500 0 D 1000 1000 500 4.4 FlatSat Operational Cycle 06 After the successful completion of the cold flow experiments, the MOXIE FlastSat system was operated using P4 control to produce oxygen. This experiment represents 45
the sixth operational cycle that the FlatSat and SOXE stacks underwent, so the run is identified as FS OC06. In order to do this, the FS remained configured in a compressor feed setup (shown previously in Figure 4-4), and a less dynamic RCT was developed. The FS OC06 run consists of a reference segment followed by a series of density changes with a single P4 pressure setpoint change in the middle of the density changes. The current was varied but kept low in the interest of a large safety margin, and the run concluded with another reference segment at an increased chamber density. In the context of MOXIE run design, the reference segments serve as a way to characterize the systems performance by applying a standard set of parameters at the beginning and sometimes end of a run. Typically, the reference segment is defined as achieving a desired flow rate of 55g/hr at the inlet of the SOXE and commanding a current of 2A through the SOXE. Recall from the physical relationships modeling in Chapter 3 that changes in current affect the flow characteristics, and thus P4, in the MOXIE fluid circuit. Since the current steps up from 1.0A to 1.5A and finally 2.0A during the first 500 seconds of the planned run, the corresponding P4 setpoints are slightly adjusted to maintain the desired flow rate for the reference segment. After the initial reference segment, the 2A SOXE current and corresponding P4 pressure setpoint to achieve 55g/hr was held with a constant chamber density to observe the steady state performance of the motor control algorithm while producing oxygen. From there, the current was dropped to 1.5A and the associated P4 setpoint to maintain the 55g/hr flow rate was held constant while the density was lowered in the FlatSat chamber. Once the minimum chamber density was achieved, the P4 setpoint was increased and the density then stepped up incrementally to the maximum desired chamber density. After the maximum chamber density was achieved, the SOXE current increased to 2A. Finally, and ending reference segment was performed by lowering the P4 setpoint to achieve a 55g/hr flow rate. The overall run sketch for FS OC06 can be seen in Figure 4-5. 46
Figure 4-5: P4 Pressure Setpoints, FS Chamber Density Setpoints, and desired SOXE current used in the P4 control FlatSat Operational Cycle 06 experiment. The SOXE stack heaters were set to approximately 840 C. 47
48
Chapter 5 Results and Discussion This chapter presents the results of both the P4 cold flow commissioning tests and FlatSat Operational Cycle 06. Discussion is made on the results and of each set of experiments, with specific attention afforded to the performance of the P4 controller, the accuracy of the physical relationships model, and the oxygen production in FS OC06. 5.1 P4 Commissioning Tests 5.1.1 Results Overview The four cold flow runs were completed in a single session, and an overview for each run is presented in Figures 5-1, 5-2, 5-3, and 5-4 for Runs A, B, C, and D, respectively. The associated control parameters are given again in Table 5.1 for reference. An in- depth review of each of the results presented in the composite figures 5-1 through 5-4 is discussed later in this section. Because the gains and offsets in Run C were used in FS OC06, Run C is analyzed in greater detail than Runs A, B, or D. Furthermore, the composite graph for Run D is truncated by comparison to Runs A through C since the offset only affects the first 5 seconds of the pressure response, and the remaining controller behavior is the same as Run A. 49
Table 5.1: P4 Commissioning Parameters Run Proportional Gain K Integral Gain K Offset A 1000 1000 0 B 1500 1500 0 C 500 500 0 D 1000 1000 500 Figure 5-1: Run Overview for P4 Commissioning Test A with gains of = = 1000 Run A utilized a proportional gain and an integral gain of 1000 with no offset. Figure 5-1 shows a snapshot of the results from the run. Most notably, the P4 motor control algorithm is able to meet the desired setpoint quickly and maintain the 50
setpoint during large changes in the density of the FlatSat chamber and the value of the P4 setpoint itself. The controller error is consistently within an acceptable range, with expected deviations during large pressure setpoint changes. Figure 5-2: Run Overview for P4 Commissioning Test B with gains of = = 1500 Run B utilized higher gains of 1500 for both the proportional and integral terms, and as such was able to maintain tighter control during times of large variations in density. This is shown in Figure 5-2. The most noticeable compromise to the improvements in control is the large error and overshoot both at the beginning of the run and during each major pressure setpoint change. This overshoot was also present in Run A but was smaller in magnitude, as expected. 51
Figure 5-3: Run Overview for P4 Commissioning Test C with gains of = = 500 Shown in Figure 5-3, Run C was able to maintain control while using a propor- tional and integral gain of 500, with no offset. In contrast to the previous runs A and B, the algorithm took longer to achieve the desired control state in response to the changes in chamber density; however, it still maintained a low error and did so with an overshoot that is noticeably less than in runs A or B. The observed low overshoot is primarily the reason for choosing the lower gains for FS OC06. Since the run profile for FS OC06 features far fewer jumps in pressure setpoints and smaller density steps, the responsiveness of the controller is less critical, and minimizing the magnitude of the overshoot becomes a dominant priority. 52
Figure 5-4: Run Overview for P4 Commissioning Test D with gains of = = 1000 and an offset of 500 applied for the first 5 seconds of the run. Since the remaining RCT is identical to Run A, the Run was concluded after the controller achieved a steady state performance. Run D used the same gains as Run A and featured an offset of 500 RPM that was applied over the first 5 seconds of the run. The overview of Run D can be seen in Figure 5-4. The motivation to use an offset is so that the pressure setpoint can be reached by the system in a much shorter time with lower gains. In this test, the initial setpoint was achieved and the run was allowed to stabilize before the run was concluded due to its similarity to Run A. Notably, the offset causes a high overshoot and then an undershoot through the controller. This type of system performance is 53
indicative of gains that are too high for the provided offset. From the cold flow runs, no distinct advantage exists from utilizing the offset with gains over 1000 for both and / . The high gains used in Runs A, B, and D were designed to elicit a quick response from the system and as such their overshoots, and in the case of Run D the undershoot, were significant. In future runs, gains lower than 500 for both and / should be tested with the offset. Across all the cold flow runs, the chamber density was controlled through a sepa- rate control system that maintains a pressure setpoint for the FlatSat vacuum cham- ber. The desired density profile with the observed density profile can be seen in Figure 5-5. For clarity, only the density data from Run C is shown in detail. Figure 5-5: Density profile and actual FlatSat chamber density during P4 commis- sioning Run C. Overall, the desired density profile was achieved; however, given the size of the FlatSat and the volume of the chamber, along with the flow rates into and out of the 54
FlatSat chamber, during times of combined density and pressure setpoint changes, the chamber density deviated from the desired step function. These deviations mini- mally impacted the results from the commissioning runs since the P4 motor control algorithm worked as intended and maintained the desired pressure setpoint. 5.1.2 Model Performance Overall, the physical relationships model performed well in predicting the charac- teristic behavior of the P4 motor control algorithm on the FlatSat system. When considering the model’s ability to predict the system’s pressure response, much of the discrepancy arises from the difference in density profiles. The model uses an ideal step function for its density profile, meaning that the non-differentiable changes in density cause a spike-and-return in the pressure response, whereas the true behavior is more akin to a ramp function when the density changes, thus causing a longer-lived error of lower magnitude, seen between 700 and 1500 seconds in Figure 5-6. Figure 5-6: Comparison of P4 control response with predicted P4 control response and P4 setpoints. 55
Aside from the differences in density between model and observations, the model is able to capture the rise times for the change in pressure setpoint well. The main limitation in the model is its ability to capture the overshoot seen in the initial rise of P4 at the beginning of the test. The P4 overshoot phenomenon was noted earlier with the data from the Flight Model, and since the overshoot is not observed during the rapid P4 setpoint changes in Run C, but is observed during the rapid P4 changes in Runs A and B, it appears to be influenced by the presence of the controller. The underlying causes for the P4 overshoot will be the focus of future work but is beyond the scope of this investigation. Figure 5-7: Comparison of observed RPM and predicted RPM from model. Where the model shows larger discrepancies is with the RPM predictions, seen in Figure 5-7. While the general shape of the modeled RPM is consistent with ob- servations, the values and range of the RPM is notably different between the model and the FlatSat data. There are several plausible explanations for this discrepancy. 56
The first is that the model was trained on data from the Flight Model due to a lack of data from the FlatSat system. Slight differences between the Flight Model and FlatSat in fluid circuit, inlet tube warming, and environmental conditions can cause differences in the model fit parameters. Another possible culprit is the difference in atmospheric characteristics. While the density of the chamber was the same as the density on Mars, the temperature was considerably higher in the lab environment. The elevated temperature decreases the viscosity of the working fluid within MOXIE, introducing discrepancies in the function of the VFCDs between the colder system on Mars and the warmer system here on Earth, regardless of the similar density condi- tions. Conceptually, this makes sense as the lower viscosity of a higher temperature gas creates a lower resistance at the VFCDs, and thus a lower pressure, resulting in the need for higher RPMs to maintain the desired P4 setpoint, as seen in the figure. These hypotheses require further investigation and will be the subject of future work. 57
5.1.3 Control System Performance The P4 motor control algorithm was able to maintain a low error during the duration of each experiment. Recall from Chapter 3 that the controller error is defined as 4, − 4 and is a measure of how well the controller maintains its desired state. Ideally, the controller error should be zero; however this is unrealistic and deviations from a zero error are inevitable during times of density and pressure changes. The compiled errors can be seen in Figure 5-8. Figure 5-8: Comparison of P4 controller error for varying gains and offsets. 58
You can also read