Improving the Workspace for A 3dof Scara Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Journal of Mechanical Engineering Research and Developments ISSN: 1024-1752 CODEN: JERDFO Vol. 44, No. 6, pp. 01-08 Published Year 2021 Improving the Workspace for A 3dof Scara Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach S N Alnomani*, K S Nassrullah, A M Imran Mechanical Engineering Department, University of Kerbala, Karbala, Iraq * Corresponding Author Email: salah.n@uokerbala.edu.iq ABSTRACT. The workspace of any robot can play a big role in accomplishing the required work perfectly. There are many parameters to be considered when designing and optimization workspace for any specific application. In this study, the effect of the flexibility of the revolute joints angle of rotation for PRR- SCARA robot on its workspaces was investigated. The workspace was studied for 13 cases, and in each case, a different range of motion for motors were selected. An optimization was done for the purpose of choosing the best working range for all robot motors. It was found that increasing the motor's working range on the first rotational joint and reducing it for the next joint will lead to improve and increase in the workspace of the robot under study. A mathematical relationship was proposed to calculate the workspace area for SCARA robot in terms of the motors working ranges with an average error of (2.07%). KEYWORDS: Robotics, workspace optimization, robot’s actuators, SCARA, Forward kinematics. INTRODUCTION Since creating the first industrial Robot and day after day, the industrial Robots utilizing is increasing because of their working to enhance the products by developing the quality and productivity. The evolution of the robotics industry has led to a reduction in the cost of robotics, and the use of robots has greatly expanded in so many industries, such as the automotive and aircraft industries. One of the most important factors that robot’s designers must focus on is the flexibility of the workspace of industrial robot [1]. The workspace affects dramatically on the robots manipulating ability so the workspace calculation or its boundary is very crucial [2]. A lot of investigations were conducted earlier to enhancing this very important factor. Kumar and Waldron [3] presented an appropriate algorithm for manipulators of at least 3 joints. They presented a specific method to detect which peculiar subset, among four different classes, a given manipulator belongs to. They also introduced the concept of the control gain ratio for each specific single-input-single-output joint control law. This will be useful in limiting the maximum gain required to achieve the isotropic compliance condition. Tsai and Soni [4] determined the workspace for manipulators which can be consisted of two or three jointed links. They traced and plot the loci-curves of a two- links manipulator and used such plots to determine the accessible regions of a three-link robotic arm. A hand size effect on workspace was proposed by Gupta and Roth [5]. They addressed the inverse kinematic problem for redundant serial manipulators and denoted that once the redundant joints can be identified, the inverse kinematics of the reduced non-redundant manipulator can be solved using Pieper, Paul or particular geometric methods. In addition, an equation for workspace was found by Spanos and Kohli [6] to be applied on the last three axes of manipulators revolute joints which perpendicularly intersect at a point. Yang et al [7], introduced a novel parametric analysis which was more convenient for the dexterous-finger reachable workspace. They built a topology of the dexterous-finger reachable workspace to extract the forward kinematical parameters of the dexterous finger. Delmas and Bidard [8] developed a method for reconfigurable manufacturing systems. They validated their method by applying it on an industrial welding task to assemble 14 different sub-components in one single reconfigurable fixture. Workspace boundaries of manipulators have three revolute joints were formulated and calculated by Ceccarelli who proposed an algebraic formulation for this purpose [9]. Haug [10] developed a method to calculate multiple points on workspace boundaries and Abdel- Malek [5] presented a formulation to determine the voids of serial industrial robots workspaces. Three revolute joints manipulators workspace were calculated by Ottaviani [11] who used an algebraic formulation and used a level-set method to analyze a three revolute manipulators workspace [12]. The same method was used later by Russo [13] to calculate four revoluted joints manipulators. 1

Improving the Workspace for a 3DOF SCARA Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach The entire above are related to serial manipulators and there are many methods to calculate the workspace of parallel manipulators. The serial and parallel manipulators were discussed by Ceccarelli [14] who used algorithms to compute workspace of such manipulators and evaluate them numerically. It is noted that most of the previous research focused on finding new algorithms and analysis methods for the purpose of evaluating the workspace of robots, with a paucity of research that dealt with investigating the dimensions of the parts of the robot itself. In this present study, Denavit-Hartenberg method was used to calculate the workspace of a SCARA Robot with different joints limitations to evaluate the effects of this factor on the workspace. Denavit-Hartenberg representation Denavit-Hartenberg representation is a common method to analyze the kinematics of robots to forward and inverse, D-H representation was created in 1955 for serial robots. The rules of attached coordinate systems of this technique as followed [15]: 1-The coordinate system origin is the point of axis (i+1) that intersects the common normal between the joints axes (i) and (i+1). 2-The zi -axis is chose arbitrarily as a positive direction which is aligned with the (i+1)th joint axis. 3-The xi-axis is directed from the ith to the (i+1)th joint and aligned with the common normal to both the ith and (i+1)th joints axes. 4-Yi-axis can be located by utilizing the right-hand rule. Every link has four parameters which can be described for any serial manipulator kinematically. These parameters are [16]: ai = the distance measured along xi from zi to zi+1, αi = the angle measured about xi from zi to zi+1, di = the distance measured along zi from xi-1 to xi, θi = the angle measured along zi from xi+1 to xi. The essential parameters and specified coordinate system of each link or joint for any manipulator are shown in ‘figure 1’. Figure 1. Joints axes for kinematics representation. Consecutive coordinate systems establish the transformation matrices by utilizing the DH parameters, where the translation and revolution of (i+1)th coordinate system will get the ith coordinate system: 2
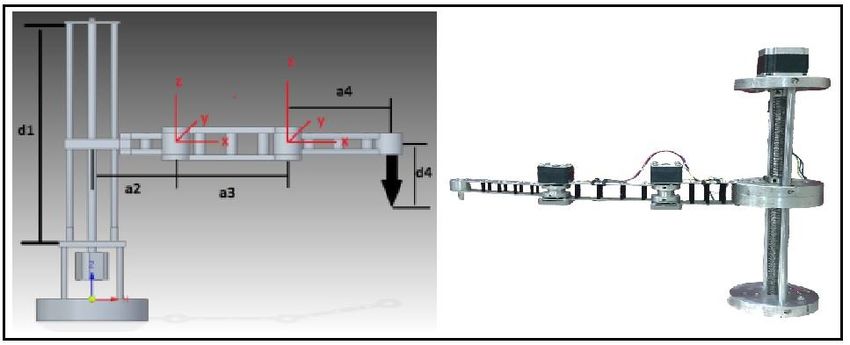
Improving the Workspace for a 3DOF SCARA Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach 1-A distance di can be resulted by translating the (i-1)th coordinate system along the (zi-1) axis. So the resulted transformation matrix is: 1 0 0 0 0 1 0 0 Td = 0 0 1 di 0 0 0 1 2-An angle θi is resulted by rotating the displaced coordinate system around the (zi-1) axis, where the displaced (xi-1) axis aligns with xi-axis and the transformation matrix of this will be: cos( i ) − sin(i ) 0 0 sin( ) cos( ) 0 0 T = i i 0 0 1 0 0 0 0 1 3-A distance ai can be obtained by translating the displaced coordinate system along the xi-axis, where the transformation matrix will be: 1 0 0 ai 0 1 0 0 Ta = 0 0 1 0 0 0 0 1 4-An angle αi is got by rotating the displaced coordinate system around the xi-axis, where in this step the (i-1)th coordinate system will transform to the coordinate system and the transformation matrix can be become: 1 0 0 0 0 cos( ) − sin( ) 0 T = i i 0 sin( i ) cos( i ) 0 0 0 0 1 By multiplying all above matrices will be: 1 0 0 0 cos( i ) − sin(i ) 0 0 1 0 0 ai 1 0 0 0 0 1 0 0 sin(i ) cos( i ) 0 0 0 1 0 0 0 cos( i ) − sin( i ) 0 Ti−1,i = 0 0 1 di 0 0 1 0 0 0 1 0 0 sin( i ) cos( i ) 0 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 and the result will be: cos( i ) − cos( i ). sin(i ) sin( i ). sin(i ) ai . cos( i ) sin( ) cos( ). cos( ) − sin( ). cos( ) a . sin( ) Ti−1,i = i i i i i i i 0 sin( i ) cos( i ) di 0 0 0 1 SCARA robot system Makino has invented a robot during the 1970’s and called it SCARA robot which is an acronym standing for Selective- Compliance Assembly Robot Arm. The first appearance of this robot is as a serial robot having 4 joints in general, one prismatic and three revolute joints. The prismatic joint may be located as a first or last joint [17]. In this study, joints were reduced to three after removing the last revolute joint. In addition, the first joint was represented to be a prismatic one while the remaining two joints were of revoluted type ‘figure 2’. 3

Improving the Workspace for a 3DOF SCARA Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach The main objective of making the first joint as the prismatic one is to reduce the weight of links since they will not be needed to support any prismatic equipment at the end of the manipulator. Figure 2. proposed SCARA arm manufactured for this study. The reachable workspace of industrial robot is different poses formed by manipulator wrist according to the base coordinate system [18]. Practically, there are many parameters which workspace depends on like the length of links, joints angle limitations as well as legs interference [19]. To investigate the effect of the joints angular ranges limitations on the SRARA workspace, many cases were studied. Each case study was selected with a specific joints angular range as listed in (table 1). Table 1. Selected case studies to be evaluated Min. Ɵ3 Max. Ɵ3 Angular range Min. Ɵ4 Max. Ɵ4 Angular range Case (deg.) (deg.) of Ɵ3(deg.) (deg.) (deg.) of Ɵ4(deg.) 1 -100 100 200 -160 160 320 2 -105 105 210 -150 150 300 3 -110 110 220 -140 140 280 4 -115 115 230 -130 130 260 5 -120 120 240 -120 120 240 6 -125 125 250 -110 110 220 7 -130 130 260 -100 100 200 8 -135 135 270 -90 90 180 9 -140 140 280 -80 80 160 10 -145 145 290 -70 70 140 11 -150 150 300 -60 60 120 12 -155 155 310 -50 50 100 13 -160 160 320 -40 40 80 All parameters listed in this table will be used as input data to indicate the position of the end effector using Denavit-Hartenberg approach. A Matlab codes were used to calculate the workspace area by record the maximum position than can be reached by the end effector for each step per cases listed in table-1 and a comparison between all results had been conducted. 4
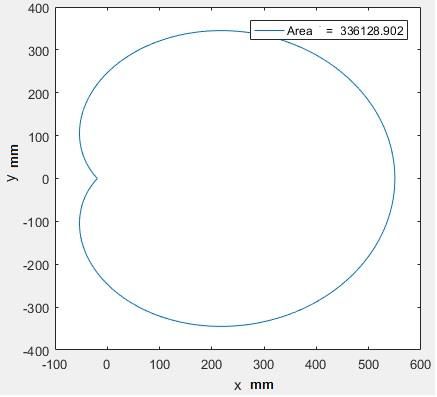
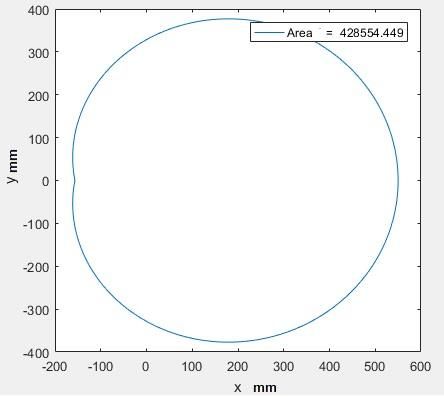
Improving the Workspace for a 3DOF SCARA Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach RESULTS The method adopted for calculating the robot workspace is by calculating the X and Y coordinates that can reached by the robots end effector when a3 =150mm and a4 =200mm . For each degree of rotation of Ɵ3, the value of the Ɵ4 angle was changed according to its ranges listed in (table-1). Matlab was used to determine the maximum point that can be reached by the end effector of the robot. The working area for the robot when using a range of rotational movement of (200 deg.) for Ɵ3 and of (320 deg.) for Ɵ4 can be noted through ‘figure 3’. It was found that the area of the workspace was (0.282 m 2). Figure 3. The workspace for the first case study in Table-1 It was observed that increasing the range of Ɵ3 and reducing the range of Ɵ4 greatly improves the working area for the robot. This idea can be noted clearly through ‘figure 4’ which shows the workspace when using a range of rotational movement of (230 deg.) for Ɵ3 and of (260 deg.) for Ɵ4. Continuation of this approach which is increasing the range of Ɵ3 and reducing Ɵ4 continuously increases the workspace. This can be noted though ‘figure 5’ which shows the working area for the robot when using a range of rotational movement of (280 deg.) for Ɵ3 and of (160 deg.) for Ɵ4. Figure 4. The workspace for the fourth case study in Table-1. 5
Improving the Workspace for a 3DOF SCARA Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach Figure 5. The workspace for the ninth case study in Table-1. All results of the workspace calculations corresponding to all the values of ranges of Ɵ3 and Ɵ4 can be observed in (table 2). It can be noted that the working area continues to increase when increasing the range of Ɵ3 and reducing that of Ɵ4. These results indicate that the maximum workspace for SCARA robot can be obtained by increasing the range of Ɵ3 to its maximum available values and minimizing the range of Ɵ4 to the lowest values according to the design requirements of this kind of robots. Table 2. SCARA workspace corresponding to its joints flexibility Range of Ɵ3 (deg) Range of Ɵ4 (deg) Area m2 200 320 0.282 210 300 0.299 220 280 0.317 230 260 0.336 240 240 0.355 250 220 0.374 260 200 0.393 270 180 0.411 280 160 0.429 290 140 0.445 300 120 0.459 310 100 0.472 320 80 0.483 A mathematical relationship had been proposed between the values of the range of Ɵ3 and the corresponding range of Ɵ4 which were selected according to (Table 2). It is clear that such relationship is of first order without any approximations and errors ‘figure 6’. This first ordered relationship can be deduced to take the following mathematical form noting that all units are in degrees: 4 = 720 − 2( 3 ) (1) 6
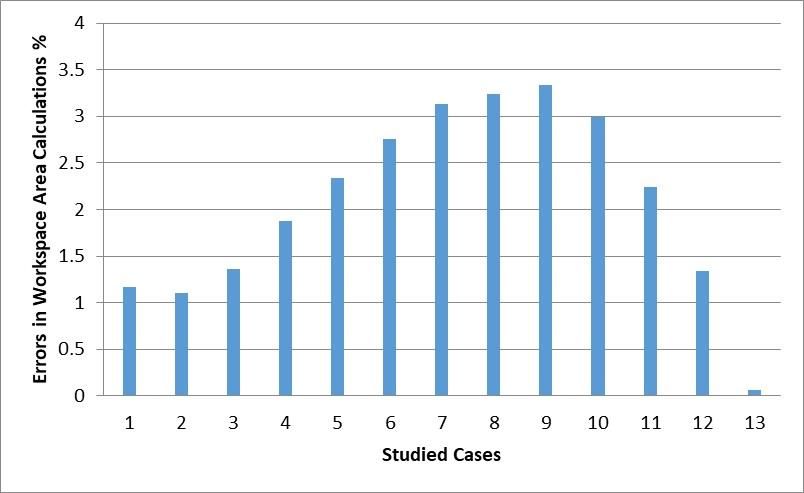
Improving the Workspace for a 3DOF SCARA Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach Figure 6. The relationship between ranges of Ɵ3 and the workspace. The average error in using the last equation can be calculated by applying it to each case studies listed in Table 1 and comparing results with the workspaces listed in Table 2. The percentage error for each case study can be noted through ‘figure 7’. The overall error for using the proposed mathematical relationship was found to be about (2.07%). Figure 7. Error of using equation (1) for each case study in table-2. CONCLUSIONS From the investigation, some concluding observations can be listed below. 1. The workspace of SCARA robot is greatly affected by the angular limits to which motors are restricted. 2. Increasing the angular range of first rotating joint and reducing the corresponding range for the next joint will lead to increase the workspace for SCARA robot. 3. Suitable angular ranges for rotational joints of SCARA robot can be selected to achieve a specific workspace according to the mathematical relationship proposed in this study with an error of about (2%). RECOMMENDATIONS This study is considered as a theoretical study that lacked to laboratory experimental tests. Therefore, the direction of the next research will be to build a miniature model of the SCARA manipulator for the purpose of verifying 7
Improving the Workspace for a 3DOF SCARA Robot by Investigating the Main Parameters of Denavit-Hartenberg Approach experimentally all the outputs of this study. This will be very useful in generalizing the method of analysis to other types of robots. REFERENCES [1] C Urrea and J Kern. “Trajectory tracking control of a real redundant manipulator of the SCARA type”, Journal of Electrical Engineering and Technology, 10(6), pp 709-718. 2015 [2] A Peidró, Ó Reinoso, A Gil, J Marín and L Payá. “An improved Monte Carlo method based on Gaussian growth to calculate the workspace of robots”. Engineering Applications of Artificial Intelligence, vol.64, pp 197-207. 2017 [3] M Verotti and N Belfiore. “Isotropic Compliance in E (3): Feasibility and Workspace Mapping. ASME”. Journal of Mechanisms and Robotics, 8(6): 061005. 2016 [4] Y Tsai and A Soni. “Accessible Region and Synthesis of Robot Arms”. J. Mech. Des., 103(4), pp 803-811. 2009 [5] I Zaplana and L Basanez. “A novel closed-form solution for the inverse kinematics of redundant manipulators through workspace analysis”. Mechanical and Machine Theory, vol.121, pp 829-843. 2018 [6] J Spanos and D Kohli. “Workspace Analysis of Regional Structures of Manipulators”. J. Mech. Transm. Autom., 107(2), pp 216-222. 2009 [7] W Yang, Z Jin Wu, X L Chen, G Z Pan and Z Zhu. “A parametric modelling method for dexterous finger reachable workspaces”. International Journal of Advanced Robotics Systems, Vol.13. 2016 [8] M Bejlegaard, W ElMaraghy, T Brunoe, A Andersen and K Nielsen. “Methodology for reconfigurable fixture architecture design”. CIRP J. Manuf. Sci. Technol., vol.23, pp 172-186. 2018 [9] Z Du and H Dong. “Optimal dimension of redundant manipulator using the workspace density function”. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci., 230(11), pp 1787-1794. 2015 [10] Q Boehler, I Charpentier, M S Vedrines and P Renaud. “Definition and Computation of Tensegrity Mechanism Workspace”. J. Mech. Robot., 7(4). 2015 [11] R Jha, D Chablat, L Baron, F Rouillier and G Moroz. “Workspace, joint space and singularities of a family of delta-like robot. Mech. Mach”. Theory, vol.127, pp 73-95. 2018 [12] E Ottaviano, M Husty and M Ceccarelli. “Level-set method for workspace analysis of serial manipulators. Advances in Robot Kinematics”, Springer, Dordrecht, pp 307-314. 2006 [13] M Russo and M Ceccarelli. “A workspace analysis of 4R manipulators via level-set formulation”. Mechanisms and Machine Science, springer, Cham, vol.43, pp 483-491. 2016 [14] M Ceccarelli. “Workspace evaluation for analysis and synthesis of manipulators, Advances in Mechanisms Design. Mechanisms and Machine Science”, Springer, Dordrecht, vol. 8, pp 289-301. 2012 [15] M Spong, S Hutchinson and M Vidyasagar. “Robot modeling and control, 1st ed”., John Wiley and Sons Inc. [16] J Craig. 2004 Introduction to Robotics - Mechanics and Control, 3rd ed”., Pearson Education, Harlow. 2005 [17] C Urrea, J Cortés and J Pascal. “Design, construction and control of a SCARA manipulator with 6 degrees of freedom”. J. Appl. Res.and Technology, 14(6), pp 396-404. 2016 [18] G Castelli and E Ottaviano. “Manipulators workspace analysis as based on a numerical approach: Theory and applications”. Manipulators: Theory, Types and Applications, Nova Science Publishers, pp 59-76. 2011 [19] P Liao. “Deep Neural Network Based Subspace Learning of Robotic Manipulator Workspace Mapping”, Proc. International Conference on Control, Artificial Intelligence, Robotics and Optimization, ICCAIRO 2018. 2018 8
You can also read