Force-Moment Sensor for Prosthesis Structural Load Measurement - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
sensors Article Force-Moment Sensor for Prosthesis Structural Load Measurement Md Rejwanul Haque , Greg Berkeley and Xiangrong Shen * Department of Mechanical Engineering, The University of Alabama, Tuscaloosa, AL 35401, USA * Correspondence: xshen@eng.ua.edu; Tel.: +1-205-348-6743 Abstract: Measurement of prosthesis structural load, as an important way to quantify the interaction of the amputee user with the environment, may serve important purposes in the control of smart lower-limb prosthetic devices. However, the majority of existing force sensors used in protheses are developed based on strain measurement and thus may suffer from multiple issues such as weak signals and signal drifting. To address these limitations, this paper presents a novel Force-Moment Prosthesis Load Sensor (FM-PLS) to measure the axial force and bending moment in the structure of a lower-limb prosthesis. Unlike strain gauge-based force sensors, the FM-PLS is developed based on the magnetic sensing of small (millimeter-scale) deflection of an elastic element, and it may provide stronger signals that are more robust against interferences and drifting since such physical deflection is several orders of magnitude greater than the strain of a typical load-bearing structure. The design of the sensor incorporates uniquely curved supporting surfaces such that the measurement is sensitive to light load but the sensor structure is robust enough to withstand heavy load without damage. To validate the sensor performance, benchtop testing of the FM-PLS and walking experiments of a FM-PLS-embedded robotic lower-limb prosthesis were conducted. Benchtop testing results displayed good linearity and a good match to the numerical simulation results. Results from the prosthesis walking experiments showed that the sensor signals can be used to detect important gaits events such as heel strike and toe-off, facilitating the reliable motion control of lower-limb prostheses. Keywords: force-moment sensor; loadcell; prosthesis load measurement Citation: Haque, M.R.; Berkeley, G.; Shen, X. Force-Moment Sensor for Prosthesis Structural Load 1. Introduction Measurement. Sensors 2023, 23, 938. https://doi.org/10.3390/s23020938 Human walking is a cyclic movement that involves coordinated reciprocating motion of two legs. Despite the continuous forward motion of the upper body, each leg’s motion Academic Editors: Maria de pattern is essentially discrete, with vastly different dynamic behaviors across different Fátima Domingues, Hugo Plácido phases in a single gait cycle [1]. During the swing phase, the leg joints (especially the da Silva and Damla Turgut knee) display low impedance, generating a pendulum-like swing motion to reposition Received: 2 December 2022 the leg in front of the upper body to prepare for the next heel strike. During the stance Revised: 6 January 2023 phase, the leg joints display much elevated impedance, preventing the leg from buckling Accepted: 10 January 2023 under the load imposed by the body weight. For individuals living with lower-limb losses, Published: 13 January 2023 restoring the locomotive functions require their prosthetic devices to replicate the dynamic characteristics of the biological legs, especially the significant differences between the stance and swing phases. Leg prostheses, in the early stage of prosthetics development, was simple, purely Copyright: © 2023 by the authors. mechanical devices with very limited capability of regulating joint behavior. With the Licensee MDPI, Basel, Switzerland. technological advances in actuation, electronics, and control, micro-processor-controlled This article is an open access article (MPC) knee prostheses were developed and entered clinical practice, for example, Ottobock distributed under the terms and C-Leg [2] and Ossur Rheo Knee [3]. Typical MPC prostheses regulate joint-resistance during conditions of the Creative Commons Attribution (CC BY) license (https:// different gait phases with hydraulic or pneumatic circuits, and some also provide swing creativecommons.org/licenses/by/ assistance using mechanical springs [4]. Unlike the control of upper-limb prostheses [5], 4.0/). realizing such functionality in leg prostheses requires accurate and reliable detection of gait Sensors 2023, 23, 938. https://doi.org/10.3390/s23020938 https://www.mdpi.com/journal/sensors
Sensors 2023, 23, 938 2 of 18 phases in real-time, which is usually conducted through the measurement of prosthesis structural load (e.g., using a sensorized pylon in the C-Leg). More recently, powered robotic lower-limb prostheses started to emerge, including the Vanderbilt Leg [6,7], MIT ankle-foot prostheses [8], Ossur PowerKnee [9], Open Source Leg [10], and Utah Leg [11]. With their capability of providing actively-powered joint action, the importance of prosthesis structural load is further highlighted, not only for the determination of the gait phase, but also for the quantification of the prosthetic leg load-bearing for more sophisticated functions (e.g., to trigger the sit-to-stand assistance when an amputee shifts load to his/her leg prosthesis [12]). For load measurement, the most extensively used method is strain measurement. Strain gauges can be firmly attached to the load-bearing structure to measure the underlying micro-scale deflection, which correlates to the magnitude to the applied load [13]. Strain gauge-based load measurement has been applied to orthopedics since the 1970s [14], and it still remains as a major approach for the prosthesis structural load measurement. Strain gauges can be attached to structural components (e.g., pylons), or a dedicated structure can be designed and instrumented to form a force sensor (i.e., load cell). For example, Sup et al. developed a 3-axis socket load cell for the control of an early version of the Vanderbilt Leg in which regions of compression and tension were defined in a double-cross structure for strain measurement [6]. Despite the maturity of such a technique, the weak signals generated by strain gauges are susceptible to interferences, and signal drift may also occur and affect the consistency of the measurement. An alternative approach, similar to the strain gauge method, is the force-sensing resistor (FSR)-based load sensing [15]. FSRs can be placed under the prosthetic feet [16,17] or embedded in the prosthesis structure [18] for load sensing, but due to their unsatisfactory measurement accuracy and consistency, FSR signals use has largely been limited to the detection of gait events (e.g., heel strike) for phase transition. The most recent progress in the area was the structural deflection-based prosthesis load sensing. Instead of using strain gauges to measure micro-scale deflection, this new sensing approach is based on the measurement of much larger (typically millimeter-scale) deflection of load-bearing structures. A typical example is the instrumented pyramid adapter developed by Gabert and Lenzi [19], which incorporates a cantilever beam-type structure as the load-sensing element. By using two magnetic sensors to measure the displacements of the two ends of the cantilever beam, this new sensor is able to provide robust sensing of the axial force and bending moment in the sagittal plane. However, the cantilever beam structure needs to be accurately machined with high-performance metal (titanium in the prototype), resulting in a high cost of manufacturing. Another example is the parallelogram load cell developed for the Vanderbilt Leg [7], which also provides reliable load measurement through a parallelogram-configured deformable structure. As its major weaknesses, this load cell only measures the axial force (not the bending moment), and it is relatively heavy due to the use of a coil spring as the elastic element. Motivated by the weaknesses of existing prosthesis load sensors and sensing ap- proaches, we developed a novel prosthesis load sensor, namely Force-Moment Prosthesis Load Sensor (FM-PLS), to provide reliable measurement of the axial force and bending moment in a lower-limb prosthesis with a simple, lightweight, and inexpensive sensor pack- age. Compared with the strain gauge-based load sensors, the FM-PLS provides stronger signals, more robust against interferences. Compared with the recent large structural deformation-based sensors, the FM-PLS is mechanically simpler and less expensive to manufacture. Specifically, compared with the recent work by Gabert and Lenzi [19], the FM-PLS uses a dedicated elastic element to measure the load (axial force and bending moment) through its deflection, which is easy and less expensive to manufacture since no high-accuracy machining is needed. Further, with the use of the curved supporting surfaces of the mounting blocks (upper and lower), the deflection of the elastic member can be modulated such that the sensor has high sensitivity when light load is applied while still being able to endure heavy load without damage.
Sensors 2023, 23, x FOR PEER REVIEW 3 of 17 surfaces of the mounting blocks (upper and lower), the deflection of the elastic member Sensors 2023, 23, 938 3 of 18 can be modulated such that the sensor has high sensitivity when light load is applied while still being able to endure heavy load without damage. This paper details the development of this FM-PLS sensor along with the related re- sults This paperthrough obtained details the developmentanalysis finite-element of this FM-PLS sensor along and experimental with the testing. related The paperresults is or- obtained through finite-element analysis and experimental testing. The paper ganized as follows: Section 2 presents the overview of the FM-PLS design and develop- is organized as follows: ment, Section including 2 presents sensing theand principle overview of the electronic FM-PLS design components; Sectionand development, 3 presents the ex- including sensing principle and electronic components; Section 3 presents the perimental procedure while Section 4 presents the results to validate the performance experimental of procedure the FM-PLS; while Section Section 4 presents 5 presents the results to the discussion; validate and Sectionthe performancethe 6 summarizes of conclusions. the FM-PLS; Section 5 presents the discussion; and Section 6 summarizes the conclusions. 2. Design and Development of the FM-PLS 2. Design and Development of the FM-PLS 2.1. Functioning 2.1. Functioning Mechanism Mechanism of of FM-PLS FM-PLS The functioning The functioning mechanism mechanism of the FM-PLS of the FM-PLS is is based based on on two-stage two-stage transduction: transduction: (1) (1) Displacement due the deformation of elastic element by applied force or bending moment, Displacement due the deformation of elastic element by applied force or bending moment, and (2) and (2) Magnetic Magnetic fieldfield transduction transduction due due to to change change in in distance distance between between the the magnet magnet andand magnetic field transducer. magnetic field transducer. The key The key component component of of 1st-stage 1st-stage transduction transduction is is aa flat flat carbon carbon fiber fiber or or fiberglass fiberglass piece, piece, which serves as the elastic element to deform under load. which serves as the elastic element to deform under load. Each end of this elastic Each end of this elastic element element is rigidly is rigidly attached attached to to aa curved curved mounting mounting block block in in aa cantilever cantilever beam-like beam-like configuration, configuration, as as shown in shown in Figure Figure 1. 1. Under Under an an axial axial force, force, the the left left and and right right ends ends experience experience symmetric symmetric deflections (i.e., ∆x ∆x22););under ∆x11 == ∆x underaa bending bending moment, moment, the the left and right ends experience asymmetric deflections deflections (i.e., (i.e.,∆x∆x1 ≠ 6= 1 ∆x 2∆x ) (Figure 2 ) 1B). (Figure As 1B). such, As any combination such, any combination of theofaxial the force and bending moment can be measured by independently axial force and bending moment can be measured by independently measuring the small measuring the small de- flections at at deflections thethe leftleft and right and rightends ends(∆x(∆x 1 and 1 and ∆x2∆x ). 2 ). Figure 1. Functioning Functioningmechanism mechanismofofthe FM-PLS: the (A)(A) FM-PLS: schematic of the schematic sensor of the structure, sensor andand structure, (B) de- (B) flections under axial force and bending moment. deflections under axial force and bending moment. The deflection deflectionof ofthe theelastic elasticmember memberchanges changes the relative the distance relative between distance betweenthethe magnets mag- and the magnetic field sensors located on top/bottom of the magnets. Since nets and the magnetic field sensors located on top/bottom of the magnets. Since the mag- the magnetic flux neticdensity is a function flux density of distance is a function from the of distance frommagnet, magnetic the magnet, flux density magnetic measured flux density by meas- the uredmagnetic field transducers by the magnetic changeschanges field transducers due to the duechange of distance to the change by applying of distance force. by applying The output force. of the magnetic The output field transducer of the magnetic is voltage. field transducer is Thus, theThus, voltage. appliedtheforce is sensed applied force as is the voltage by the transducer through two-stage transductions. sensed as the voltage by the transducer through two-stage transductions. Both Both stages stages ofof the the transduction transduction principle principle have have aa substantial substantial impact impact onon its its capacity capacity to to measure measure force and bending moment. To establish the relationship between applied force force and bending moment. To establish the relationship between applied force and and magnetic magnetic field field sensor sensor voltage voltage output, output, analyses analyses (either (either simulation simulation or or mathematical) mathematical) have have been been carried carried out in multiple out in multiple stages. stages. The The elastic elastic member member between between thethe upper upper and and lower lower blocks works as a cantilever beam. Hence the deflection of the elastic member blocks works as a cantilever beam. Hence the deflection of the elastic member is a function is a function of the active length of the cantilever beam. This sensor design adopts a curved surface for both upper and lower blocks (as shown in Figure 1) which modulates the active length of the elastic member and thus controls the deflection. That means this feature makes the sensor sensitive at low force while still withstanding heavy load without damage.
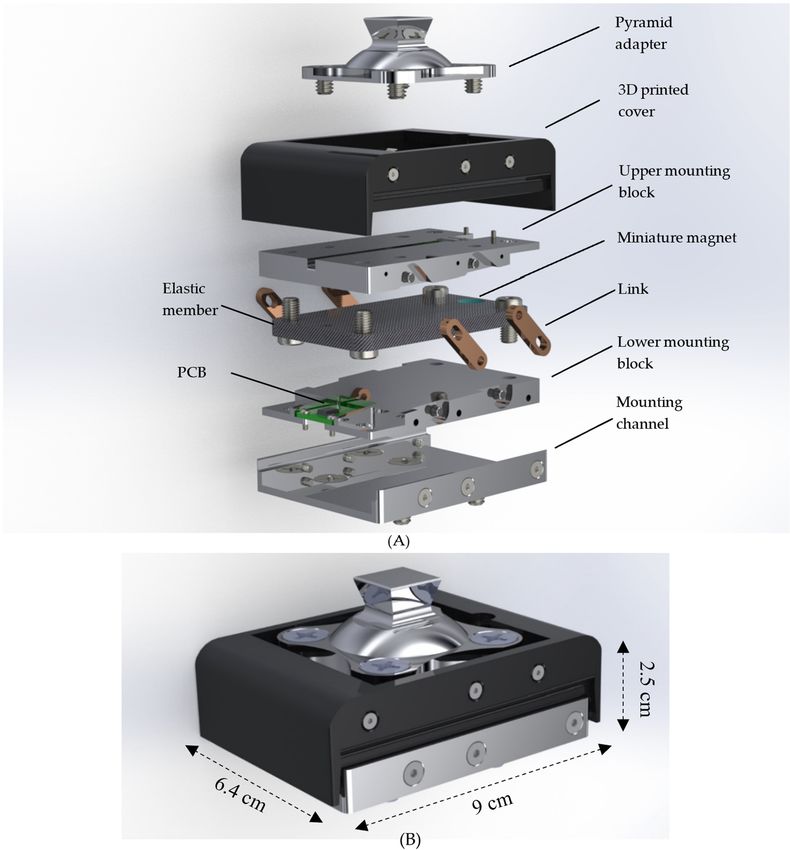
Sensors 2023, 23, x FOR PEER REVIEW 4 of 17 Sensors 2023, 23, x FOR PEER REVIEW 4 of 17 of the active length of the cantilever beam. This sensor design adopts a curved surface for of the upper both active and length of the lower cantilever blocks beam. (as shown inThis sensor Figure design 1) which adopts a the modulates curved activesurface lengthforof Sensors 2023, 23, 938 both upper and lower blocks (as shown in Figure 1) which modulates the active 4 ofof length 18 the elastic member and thus controls the deflection. That means this feature makes the the elastic sensor member sensitive andforce at low thus whilecontrols stillthe deflection. heavy withstanding That means this feature load without damage.makes the sensorThe sensitive at low force while still withstanding heavy load second stage of transduction relies on the amount of magnetic flux measured by without damage. The The second the magnetic second stage stage field of of transduction sensor. transduction Although the relies relies on on the magnetic amount thefield amount of of magnetic to theflux magnetic is related flux measured from by measured distance by the the the magnetic magnetic magnet, field field sensor. the magnetic sensor. fieldsAlthough around the Although athe magnetic magnetic magnet are field field is is related related not uniform intoallthe to the distance distanceThe directions. from the frommag- the magnet, magnet, netic fieldthedepends magnetic magnetic on fields fields aroundfactors around numerous a amagnet magnet are are not including not uniform uniform the shape in the in of all all directions. directions. magnet,The The the mag- magnetic distance netic field field depends depends on on numerousnumerousfactors factors including including the the shape ofshape the between the poles, as well as the specific position around the magnet. The magnet used of the magnet, magnet, the the distance distance between between the poles, in the the sensor poles, as well asas design the well can beasconsidered specific the specific position position around as the around magnet. the cylindrical the The bar magnet. magnet magnet The usedmagnet whose in the two used sensor opposite in the design sensor can be design can considered be considered as the cylindricalas the cylindrical bar magnet bar whose faces are the two poles. The magnetic field distribution around a cylindrical bar magnetmagnet two whose opposite two opposite faces are the two [20] poles. faces are be can The twomagnetic theshown poles. in theThe field distribution magnetic Figure 2. around a cylindrical field distribution around a bar magnetbar cylindrical [20]magnet can be shown [20] canin bethe Figure shown in 2. the Figure 2. Figure 2. Magnetic field distribution of a cylindrical bar magnet. Figure 2. Figure Magnetic field 2. Magnetic field distribution distribution of of aa cylindrical cylindrical bar bar magnet. magnet. The magnetic flux density at a distance d (as shown in Figure 3), in the axial direction, The magnetic magnetic flux flux density density at at aadistance distance dd(as (asshown shown inFigure Figure 3), inthe theaxial axialdirection, direction, can The be expressed as Equation (1) [21], where H is the in thickness3),ofinthe magnet, r is the can can be expressed be expressed as Equation as Equation (1) [21], where H is the thickness of the magnet, rr is is the the radius of the magnet and Br is(1) the[21], where radial H is theofthickness component of theflux the magnetic magnet, density in the radius radius of the magnet and B r is the radial component of the magnetic of the magnet and Br is the radial component of the magnetic flux density in the flux density in axial direction. the axial direction. axial direction. Br H+ d d B = −√ (1) (1) 2 √ 2 + 2 q 2 r d 2 (1) r + ( H + d ) √ Figure 3.3. The Figure Themagnetic magneticfluxfluxdensity of of density a cylindrical barbar a cylindrical magnet (radius magnet r andr and (radius thickness H) inH) thickness theinaxial the Figure axial 3. The direction magnetic at a flux distance direction at a distance d. density d. of a cylindrical bar magnet (radius r and thickness H) in the axial direction at a distance d. 2.2. Overview of the Design The main design objective of the FM-PLS was to measure the axial force and bending moment simultaneously while minimizing the mechanical complexity. The FM-PLS consists of four main structural components and two sets of sensing components. The structural components are: (1) Elastic member, (2) Upper mounting block, (3) Lower mounting block, and (4) Detachable adapter, as shown in Figure 4. The elastic
2.2. Overview of the Design The main design objective of the FM-PLS was to measure the axial force and bending moment simultaneously while minimizing the mechanical complexity. Sensors 2023, 23, 938 The FM-PLS consists of four main structural components and two sets of sensing 5 of 18 components. The structural components are: (1) Elastic member, (2) Upper mounting block, (3) Lower mounting block, and (4) Detachable adapter, as shown in Figure 4. The elastic member member is the sensor’s is the sensor’s core structural core structural component component whichwhich is mounted is mounted to thetoupper the upper and and lowerlower blockblock on each on each end.end. By measuring By measuring the upper the upper and and lower lower blocks blocks relative relative displace- displacement (determined ment by theby (determined elastic deflection the elastic of the member), deflection the axialthe of the member), force andforce axial bending moment and bending can be determined moment accordingly. can be determined The mating accordingly. Thesurface matingofsurface the lower/upper block with of the lower/upper the block elasticthe with member is curvedistocurved elastic member modulate the deflection to modulate of the elastic the deflection member. of the elastic member. Figure 4. Detail design of the FM-PLS sensor: (A) Exploded view, and (B) FM-PLS sensor with di- Figure 4. Detail design of the FM-PLS sensor: (A) Exploded view, and (B) FM-PLS sensor mensions. with dimensions. The The sensing sensingcomponents componentsconsist of of consist magnetic field magnetic sensors field and and sensors magnets. For theFor magnets. meas- the urement of the deflections, a miniature magnet is embedded on each end of the elastic measurement of the deflections, a miniature magnet is embedded on each end of the elastic element, andaamagnetic element, and magneticsensor sensor is embedded is embedded in the in the freefree end end of each of each curved curved mounting mounting block, measuring the change of the magnetic field due to the movement of the corresponding magnet. As such, the magnet sensors’ signals serve as indirect measurements of the force/moment applied to the sensor. Note that each magnetic sensor is embedded in a small, printed circuit board (PCB), which also includes the signal conditioning circuit. As such, the output signals of the FM- PLS can be directly routed to the prosthesis microcontroller as a plug-n-play component.
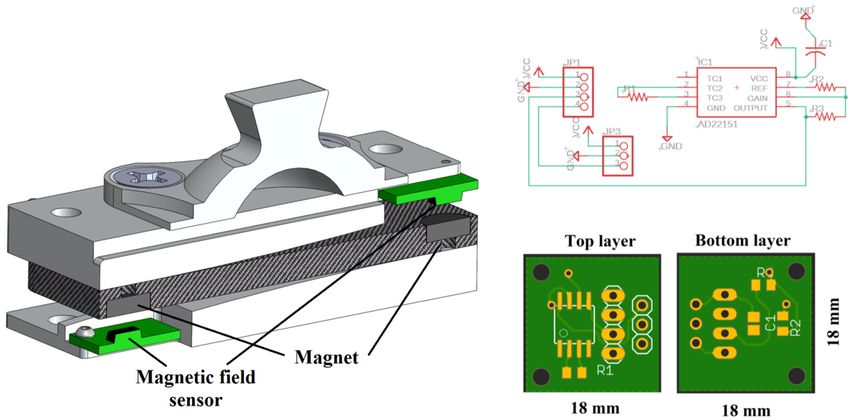
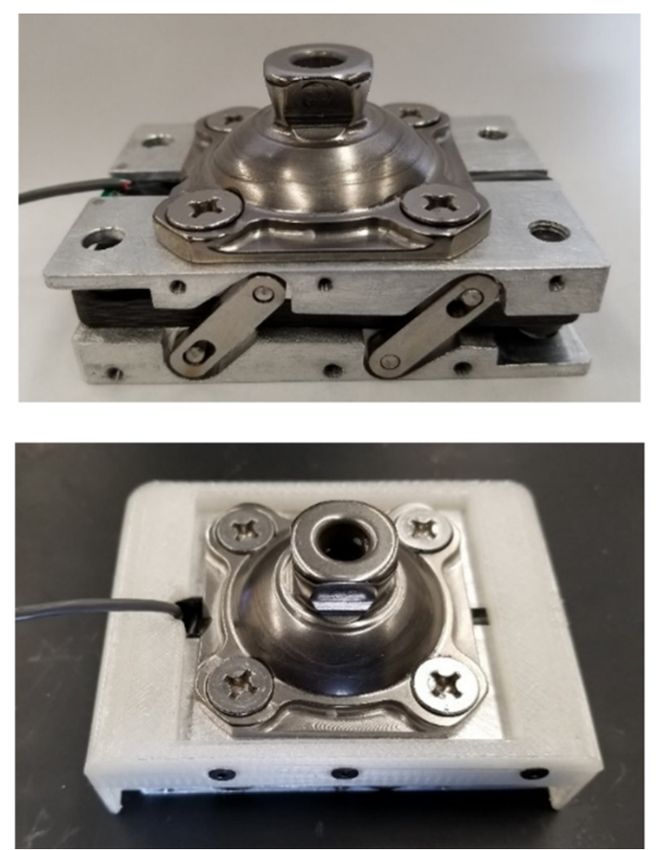
block, measuring the change of the magnetic field due to the movement of the correspond- ing magnet. As such, the magnet sensors’ signals serve as indirect measurements of the force/moment applied to the sensor. Sensors 2023, 23, 938 Note that each magnetic sensor is embedded in a small, printed circuit board (PCB), 6 of 18 which also includes the signal conditioning circuit. As such, the output signals of the FM- PLS can be directly routed to the prosthesis microcontroller as a plug-n-play component. Further, the standard pyramid connector is mounted to the top of the FM-PLS, and a Further, the standard pyramid connector is mounted to the top of the FM-PLS, and a detachable mounting channel is added at the bottom of the sensor to allow the sensor to detachable mounting channel is added at the bottom of the sensor to allow the sensor to be mounted to a lower-limb prosthesis using the threaded holes for the standard pyramid be mounted to a lower-limb prosthesis using the threaded holes for the standard pyramid connector (i.e., attach the mounting channel to the prosthesis using the existing mounting connector (i.e., attach the mounting channel to the prosthesis using the existing mounting holes for the pyramid connector; subsequently, attach the rest of the sensor to the mount- holes for the pyramid connector; subsequently, attach the rest of the sensor to the mounting ing channel; finally, mount the pyramid connector to the top of the sensor). As such, the channel; finally, mount the pyramid connector to the top of the sensor). As such, the FM-PLS can be easily integrated into the prosthesis structure without affecting the stand- FM-PLS can be easily integrated into the prosthesis structure without affecting the standard ard connection interface, essentially forming a sensorized pyramid connector (similar to connection interface, essentially forming a sensorized pyramid connector (similar to [19]). [19]). To facilitate the sensor’s practical use in lower-limb prostheses, a pair of slotted bars To facilitate the sensor’s practical use in lower-limb prostheses, a pair of slotted bars are are added added onon each each side side to to limit limit thethe extension extension when when a pulling a pulling force force is applied is applied (e.g., (e.g., during during the the swing). The elastic member is made of E-fiberglass/epoxy with 67% fiber volumeratio swing). The elastic member is made of E-fiberglass/epoxy with 67% fiber volume ratio (GC-67-UB, (GC-67-UB,PolyOne PolyOneCorporation, Corporation,Ohio, Ohio,USA) USA)while whilethe therest restofofthe thestructural structuralcomponents components are are made of 7075 aluminum. Finally, a 3D-printed cover (made with PLAPlastic) made of 7075 aluminum. Finally, a 3D-printed cover (made with PLA Plastic)isisadded added totoencapsulate the entire sensor and protect the interior components for its future encapsulate the entire sensor and protect the interior components for its future practical practical use. use.The The3D3Ddimensions dimensionsofofthe theFM-PLS FM-PLSsensor sensorare are90 90mm mm××6464mm mm×× 2525mmmm(without (withoutthe the pyramid adapter), as shown in the Figure 4B. The prototype of pyramid adapter), as shown in the Figure 4B. The prototype of the FM-PLS sensor the FM-PLS sensor is is shown shown in Figure in Figure 5. 5. Figure Figure5.5.Prototype Prototypeofofthe theFM-PLS FM-PLSsensor sensor(left) (left)and andFM-PLS FM-PLSfitted fittedon ona arobotic roboticprosthesis. prosthesis. 2.3.Electrical 2.3. ElectricalComponents Components AAcustom-printed custom-printed circuit circuit board board (PCB) (PCB)waswasdesigned designedand developed and developed to house to housethe mag- the netic field sensor along with other electronic components necessary for the magnetic field sensor along with other electronic components necessary for the force/mo- force/moment transduction ment andand transduction signal conditioning. signal conditioning.TheThe AD22151 AD22151 (Analog (Analog Devices, Devices, Inc., Inc.,Wilmington, Wilming- ton, MA, USA) was used as the magnetic field sensor. The schematic diagramofofthe MA, USA) was used as the magnetic field sensor. The schematic diagram thePCB PCBis shown in Figure 6 (top right) while in Figure 6 (bottom right) shows the is shown in Figure 6 (top right) while in Figure 6 (bottom right) shows the PCB layout. PCB layout. Two identical, small PCBs (18 mm × 18 mm) were made for each side Two identical, small PCBs (18 mm × 18 mm) were made for each side of the FM-PLS. Theof the FM-PLS. The PCBsare PCBs aremounted mountedon onthe theupper upperandandlower lowerblock blocksuch suchthat thatthe theAD22151 AD22151sensor sensorstays stayson on top/bottom of the magnet. Both boards are connected by electrical wires top/bottom of the magnet. Both boards are connected by electrical wires to share the to share the power supply as well as to facilitate the access of both sensor signals from one PCB. The sensor signal can be read in real-time using Analog-to-Digital Converter (ADC) interface.
Sensors 2023, 23, x FOR PEER REVIEW 7 of 17 Sensors 2023, 23, 938 power supply as well as to facilitate the access of both sensor signals from one7PCB. of 18 The sensor signal can be read in real-time using Analog-to-Digital Converter (ADC) interface. Figure 6. Section Figure 6. Sectionview viewofofthe theFM-PLS FM-PLS showing placement showing placement ofof electrical electrical component component and and magnet magnet (left);(left); TheThe electrical circuit diagram (top right) and custom-printed circuit board (bottom right). electrical circuit diagram (top right) and custom-printed circuit board (bottom right). 2.4.2.4. Finite Element Analysis Finite Element Analysis To determine the structural displacement, Finite Element Analysis (FEA) was con- To determine the structural displacement, Finite Element Analysis (FEA) was con- ducted using Ansys Mechanical (Ansys Inc., Canonsburg, PA, USA) under various loading ducted using Only conditions. Ansys theMechanical (Ansys elastic member and Inc., Canonsburg, upper/lower PA,blocks mounting USA) were under various load- considered ingasconditions. they are the primary contributors of the displacement study. The analysis waswere Only the elastic member and upper/lower mounting blocks consid- further ered as theyby simplified are the primary considering bothcontributors of the blocks to be rigid, displacement as they are connectedstudy. Thestructural to other analysis was further simplified components of theby considering prosthesis both and thus theblocks to bearerigid, deflections as they negligible are connected compared to other to that of the elastic member. The elastic member was composed of 33,299 quadratic tetrahedrals structural components of the prosthesis and thus the deflections are negligible compared and ma- terialof to that properties formember. the elastic E-fiberglass/epoxy The elasticwith 67% fiber member wasvolume ratio (GC-67-UB, composed PolyOne tet- of 33,299 quadratic Corporation, Avon Lake, OH, USA) were assigned and summarized in Table 1. With the rahedrals and material properties for E-fiberglass/epoxy with 67% fiber volume ratio (GC- symmetry of the assembly, only half of the components in their longitudinal direction were 67-UB, PolyOne Corporation, Avon Lake, OH, USA) were assigned and summarized in considered and symmetric boundary conditions were applied to the appropriate surfaces. Table The1.mounting With theblocks symmetrywere of the assembly, constrained to theonly half elastic of the by member components in their longitu- line body connections dinal representing the low alloy steel fasteners of the assembly. Finally, the adjoiningapplied direction were considered and symmetric boundary conditions were surfacesto the appropriate surfaces. of the elastic member The to mounting blocks the respective were constrained mounting to the elastic blocks were allowed member to freely by line slide in body connections contact representing but penetration the low was penalized to alloy steel achieve fasteners accurate of the assembly. deformations Finally, the of the assembly. adjoining surfaces of the elastic member to the respective mounting blocks were allowed Table 1. The material properties of the elastic member. to freely slide in contact but penetration was penalized to achieve accurate deformations of the assembly.Orthotropic Elasticity Young’s modulus X direction 5.8 × 106 psi Table 1. TheYoung’s material properties modulus of the elastic member. Y direction 1.5 × 106 psi Young’s modulus Z direction 1.5 × 106 psi Orthotropic Elasticity Poisson’s Ratio XY 0.3 Young’sPoisson’s modulus X direction Ratio YZ 5.8 0.3× 106 psi Poisson’s Ratio XZ 0.3 Young’s modulus Y direction 1.5 × 106 psi Shear Modulus XY 6 × 105 psi Young’sShear modulus Z Modulus YZdirection 4.2 1.5 psi × 10×5 10 psi 6 Poisson’s Ratio XZ Shear Modulus XY 5 6 × 10 0.3 psi Poisson’s Ratio YZ 0.3 Poisson’s The maximum Ratio force wasXZ chosen as 5000 N in the analysis which is0.3 more than six times of average Shear humanModulus adult weight. XY Figure 7 the displacement of the elastic member at the 6 × 105 psi location of the magnet by varying the axial force from 0 N to 5000 N. This was achieved Shear Modulus YZ 4.2 × 105 psi over 14 linearly incremented steps in a quasistatic fashion. The figure shows that the trend Shear Modulus XZ 6 × 105 psi
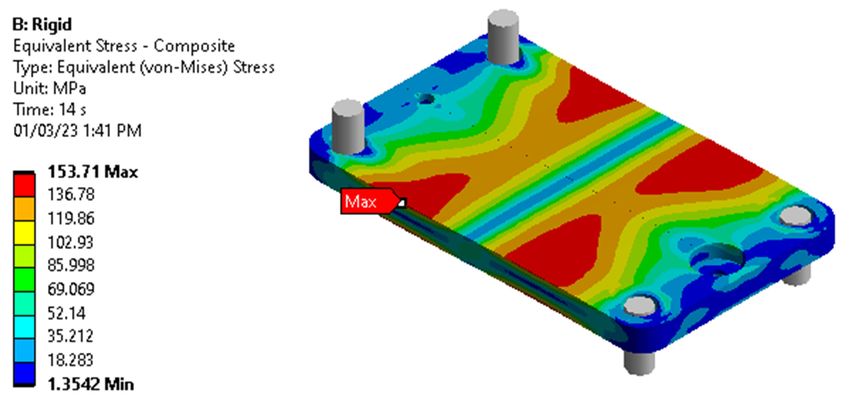
Sensors 2023, 23, x FOR PEER REVIEW 8 of 17 The maximum force was chosen as 5000 N in the analysis which is more than s times of average human adult weight. Figure 7 the displacement of the elastic member The of the location maximum the magnetforcebywas chosen varying theasaxial 5000force N infrom the analysis 0 N to 5000which N.isThis morewas than six achieve Sensors 2023, 23, 938 times of average human adult weight. Figure 7 the displacement of over 14 linearly incremented steps in a quasistatic fashion. The figure shows that the tren the elastic member 8 of 18 at thedisplacement of the location of the ismagnet by varying nonlinear as thethe loadaxial force from increases; 0 N tothe rather 5000 N. This was achieved displacement gradient over 14 linearly incremented steps in a quasistatic fashion. The figure shows that the trend decreasing as the load increases. The von mises stress of the FEA is shown in Figure 8. Th of of thethe displacement displacementisisnonlinear nonlinear asas the load load increases; increases;rather ratherthethe displacement displacement gradient is gradient maximum stress as is decreasing on the elastic member is mises 153.71 MPa, which isis lower than the tensi decreasing as the the loadload increases. increases. TheThe von von mises stressstressofofthe the FEA is FEA shown shown in in Figure Figure8.8. The strength Theof maximum thestress maximum elastic onmember, stress on the the meaning elastic elastic member member itisis withstands MPa,heavy 153.71 MPa, 153.71 which whichisload lower without is lower the damage. thanthan tensile the tensile strength strength ofofthe theelastic elastic member, member, meaning meaningit it withstands heavy withstands loadload heavy without damage. without damage. 1.6 1.6 1.4 1.4 1.2 1.2 Displacement (mm) Displacement (mm) 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 0 10001000 2000 2000 3000 3000 4000 4000 5000 5000 Force (N) Force (N) Figure 7. FEA result: displacement of the elastic element under axial load. The displacement has Figure 7.calculated FEA Figure been result: 7. FEA displacement result: at the displacementof location of the of the elasticelement the elastic magnet. element under under axial axial load. load. The The displacement displacement has h been calculated at the location of the been calculated at the location of the magnet. magnet. Figure 8. FEA: stress on the elastic element by applying 5000 N axial load. Figure 8. FEA: stress on the elastic element by applying 5000 N axial load. 3. Experimental Validation 3.1. Benchtop Testing Figure 8. FEA: stress on the elastic element by applying 5000 N axial load. The goal of the benchtop testing was to monitor the loading response of the FM-PLS using an off-the-shelf loadcell as a reference measure. A testing setup was custom designed

using an off-the-shelf loadcell as a reference measure. A testing setup wa signed and fabricated for the benchtop testing of the FM-PLS in different lo tions. The setup consists of a stationary support plate, moveable mounting p Sensors 2023, 23, 938 cylindrical support bars, as shown in Figure 9. An off-the-shelf prosthetic 9 of 18 foo to the movable mounting plate through the prosthetic load sensor to be teste the experiments). The moveable mounting plate with four through-holes and fabricated for the benchtop testing of the FM-PLS in different loading conditions. The bearings installed), setup consists slides of a stationary along support four plate, cylindrical moveable mountingsupport plate, and bars (serving as ve four cylindrical rails). support This bars,ensures as shownthe prosthetic in Figure foot can move 9. An off-the-shelf upwards prosthetic or downwards foot is mounted to the wh movable mounting plate through the prosthetic load sensor to be tested (FM-PLS in the horizontal. To apply a pushing force, a lead screw assembly is used to expand experiments). The moveable mounting plate with four through-holes (with sleeve bearings between the stationary installed), slides support along four cylindrical platebars support and the moveable (serving mounting as vertical sliding plate. To rails). This ground ensures thetruth measurement prosthetic foot can moveof the applied upwards load while or downwards (anyremaining combination of the ax horizontal. To apply a pushing force, a lead screw assembly is used to expand the distance between bending moment), an off-the-shelf load cell (ELPF-500-T3E, Measuremen the stationary support plate and the moveable mounting plate. To provide the ground Hampton, VA, USA) truth measurement supports of the applied loadthe (anyprosthetic combination foot of thefrom underneath axial force and bending at a sele corresponding to theload moment), an off-the-shelf desired loading condition. cell (ELPF-500-T3E, Measurement InSpecialties, this experiment, Hampton, VA, the loadc USA) supports the prosthetic foot from underneath at a selected position corresponding tioned at three locations underneath the foot piece, which are: (1) aligned w to the desired loading condition. In this experiment, the loadcell was positioned at three the FM-PLS, locations (2) atthethe underneath footheel piece,of the are: which prosthetic (1) alignedfoot, and (3) with center atFM-PLS, of the the toe(2)(ballat joint thetic the heelfoot, of theas shownfoot, prosthetic in Figure and (3) at9.the toe (ball joint) of the prosthetic foot, as shown in Figure 9. Figure 9. FM-PLS benchtop testing setup. Figure 9. FM-PLS benchtop testing setup. 3.2. Testing with Prosthesis The FM-PLS was fitted with a prototype knee prosthesis to evaluate its FM-PLS was interfaced with the prosthesis main controller unit to feed the s to the controller. The prosthesis controller uses finite-state impedance contro
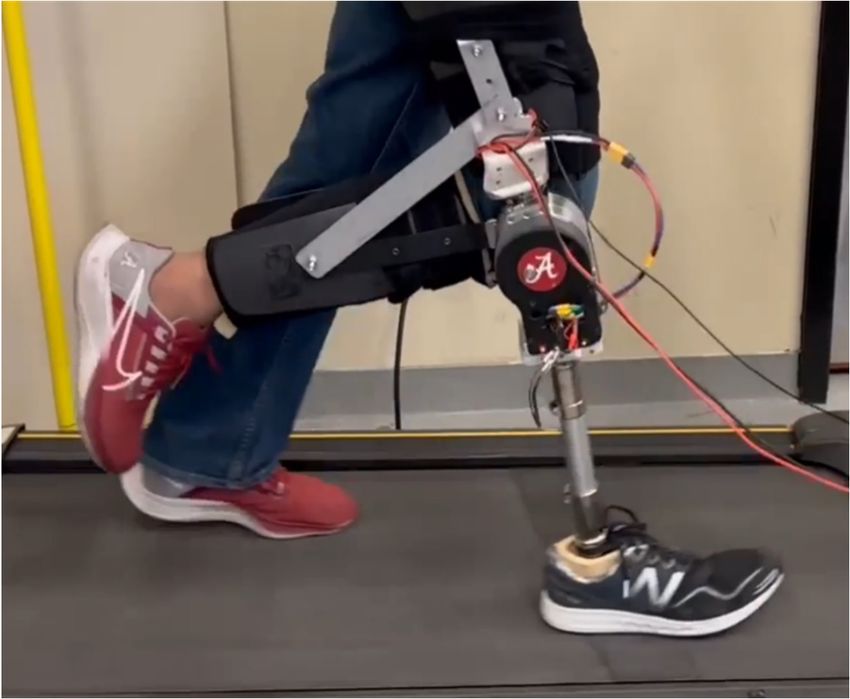
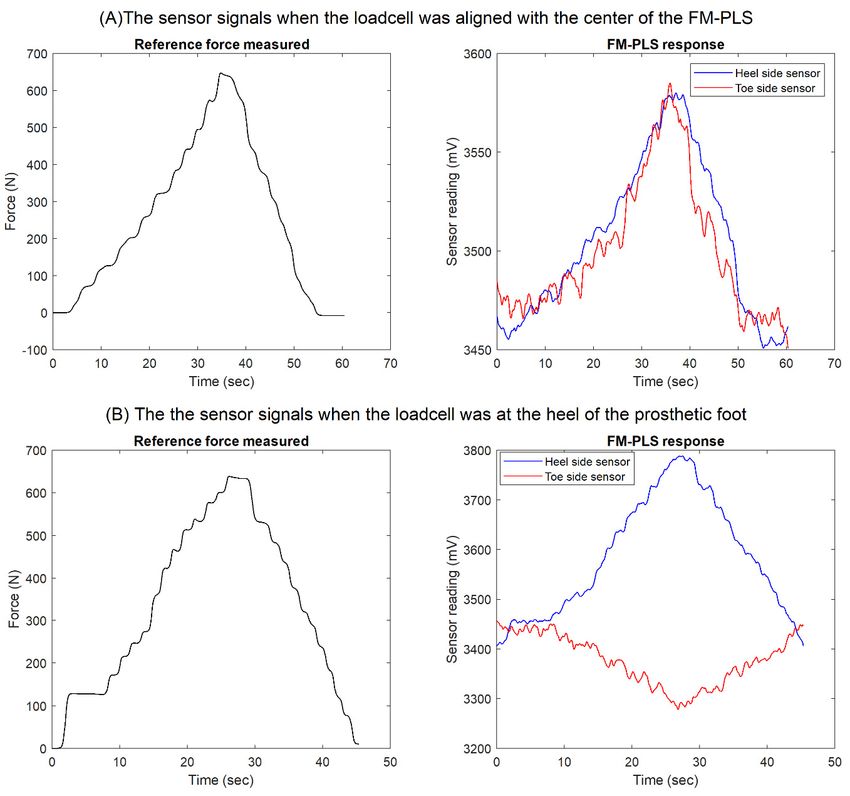
Sensors 2023, 23, 938 10 of 18 Sensors 2023, 23, x FOR PEER REVIEW 3.2. Testing with Prosthesis The FM-PLS was fitted with a prototype knee prosthesis to evaluate its performance. which was FM-PLS the interfaced real-timewithdetection of important the prosthesis gaitunit main controller events to feedisthe crucial. FM-PLS sig sensor signals to used in this experiment to identify those important gait events for theforcontroll the controller. The prosthesis controller uses finite-state impedance control strategy, which the real-time detection of important gait events is crucial. FM-PLS signals will be An able-bodied male participant (31 years old, 175 cm, and 70 kg) particip used in this experiment to identify those important gait events for the controller. study. An able-bodied An able-bodied prosthesis male participant (31 testing-adapter was70used years old, 175 cm, and to attach the kg) participated in prost subject. The experimental setup is shown in Figure 10. The participant walked this study. An able-bodied prosthesis testing-adapter was used to attach the prosthesis to the subject. The experimental setup is shown in Figure 10. The participant walked mill at two different speeds (1 mph and 2 mph) while a total of 94 walking on a treadmill at two different speeds (1 mph and 2 mph) while a total of 94 walking recorded. cycles The duration were recorded. of theofexperiment The duration the experiment waswas338 338 ss and and aatotal total of of 173,160 sa 173,160 taken. were taken. samples Figure Figure 10.10. Prosthesis Prosthesis fitted fitted with thewith thesensor FM-PLS FM-PLS sensor prototype. prototype. 4. Results 4. Results 4.1. Benchtop Testing vs. Numerical Simulation 4.1.The Benchtop Testing results of vs. Numerical the benchtop Simulation testing while placing the off-the-shelf loadcell underneath of the prosthetic foot as a reference measure are shown in Figure 11. Both heel side and toeThesideresults magnetic offlux thesensor benchtop testing responses while placing are depicted while thethe off-the-shelf off-the-shelf loadcell loadcell of the was prosthetic (1) aligned footofasthea FM-PLS with center reference measure (shown in Figureare shown 9, left column),in(2)Figure 11.ofBoth he at the heel the prosthetic foot (shown in Figure 9, middle column), and (3) at the ball toe side magnetic flux sensor responses are depicted while the off-the-shelf lo of the prosthetic foot (shown in Figure 9, right column). (1) aligned with center of the FM-PLS (shown in Figure 9, left column), (2) at the prosthetic foot (shown in Figure 9, middle column), and (3) at the ball of th foot (shown in Figure 9, right column). Based on the FEA, Figure 12 shows the change of relative distance betwee net and the magnetic field transducer with respect to the change of axial force, their 4th-order polynomial fitting. As shown in this figure, the 4th-order polyno can express the force-distance relationship with good accuracy. The coefficien order polynomial model are as follows: 4.8069× 10−10, −2.8442× 10−7 6.9600× 10 and 3.9971.
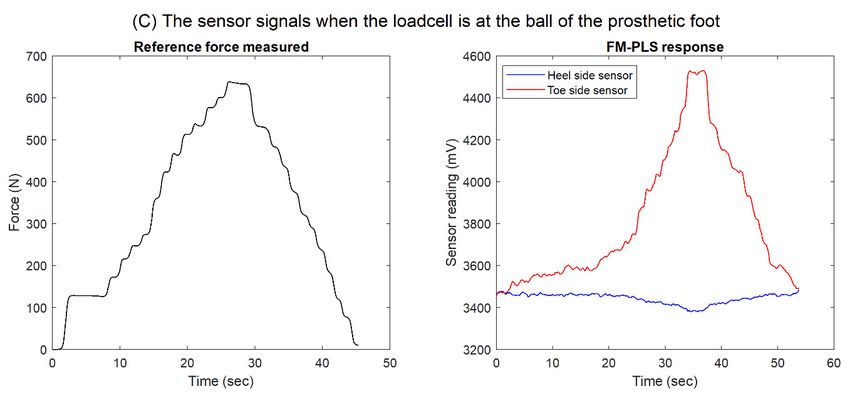
Sensors 2023, 23, x FOR PEER REVIEW 11 of 17 Sensors 2023, 23, 938 11 of 18 Figure Figure11.11. Benchtop Benchtoptesting testing results: referencemeasure, results: reference measure, heel heel side side andand toe side toe side magnetic magnetic flux sensor flux sensor responses responses while whilethethe off-the-shelf off-the-shelfloadcell loadcellwaswas (A) (A) aligned aligned with center of with center of the theFM-PLS FM-PLS(shown (showninin Fig- ureFigure 9, left9,column), (B) at left column), the (B) at heel of the the heel prosthetic of the foot prosthetic foot(shown (shownin in Figure Figure 9,9, middle middlecolumn), column), and (C) and at the ball of the prosthetic foot (shown in Figure 9, right column). (C) at the ball of the prosthetic foot (shown in Figure 9, right column). Figure 13 (left) illustrates the change in magnetic flux density with respect to the rel- ative axial distance between the magnet and the magnetic flux transducer. By combining the force-distance relationship expressed by the 4th-order polynomial model and the dis-
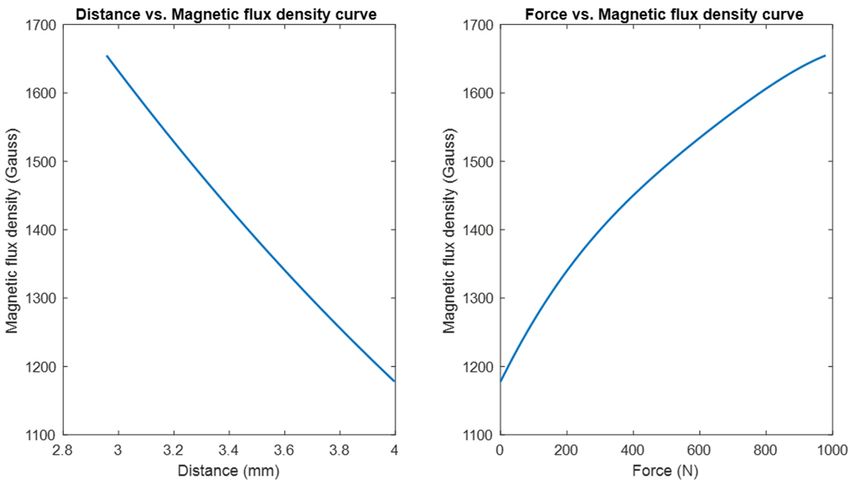
Sensors 2023, 23, 938 12 of 18 R PEER REVIEW 12 of 17 Based on the FEA, Figure 12 shows the change of relative distance between the magnet and the magnetic field transducer with respect to the change of axial force, along with their field relation was 4th-order established, as shown polynomial fitting. Asinshown Figure 13 (right). in this figure, theSince thepolynomial 4th-order voltage model output canof the magnetic flux express density thetransducer force-distanceis proportional relationship to the with good magnetic accuracy. field, the The coefficients force-mag- of the 4th-order polynomial model are as follows: 4.8069 × 10 −10 , −2.8442× 10−7 6.9600× 10−5 , −0.01139, netic field model can be converted to the force-voltage output model. and 3.9971. Average distance of the magnet from encoder (mm) Figure 12. The change of 12. Figure relative distance The change between of relative distancethe magnet between and the the magnet andmagnetic field the magnetic field transducer transducer with respect to the change of axial with respect force and to the change their of axial force4and th -order polynomial their 4th-order fitting. polynomial fitting. Figure 13 (left) illustrates the change in magnetic flux density with respect to the relative axial distance between the magnet and the magnetic flux transducer. By combining the force-distance relationship expressed by the 4th-order polynomial model and the distance-magnetic flux density relationship given by Equation no. (1), the force-magnetic field relation was established, as shown in Figure 13 (right). Since the voltage output of the magnetic flux density transducer is proportional to the magnetic field, the force-magnetic field model can be converted to the force-voltage output model.
Aver Sensors 2023, 23, 938 13 of 18 Figure 12. The change of relative distance between the magnet and the magnetic field transducer with respect to the change of axial force and their 4th-order polynomial fitting. Sensors 2023, 23, x FOR PEER REVIEW 13 of 17 Figure 13. Figure 13. The The change change of magnetic flux of magnetic density with flux density with respect respect to to the the relative relative distance distance between between the the magnet and magnet and the the magnetic magneticfield fieldtransducer transducer(left). (left).The Thechange changeofofmagnetic magnetic flux flux density density with with respect respect to to axial force (right). axial force (right). When the off-the-shelf loadcell is positioned at the center, the applied load on the When the off-the-shelf loadcell is positioned at the center, the applied load on the FM-PLS can be considered as the axial force. Figure 14 shows the experimentally meas- FM-PLS can be considered as the axial force. Figure 14 shows the experimentally measured ured FM-PLS FM-PLS sensor sensor readings readings while while theforce the axial axial force was was gradually gradually increased increased from from 0 to 650 0 to 650 N. The N. figure The figure also shows also shows the simulated the simulated sensor(based sensor reading reading on(based on simulation) numerical numerical simulation) for the for similar the similar axial axial force. force. Average sensor reading (mV) Figure 14.14. Figure Comparison Comparisonofofsensor sensor readings fromnumerical readings from numerical simulation simulation andand benchtop benchtop testing testing of theof the FM-PLS during FM-PLS the during theaxial axialforce force change. change. Figure 15 shows the scatter plot of the reference force (measured by the off-the-shelf loadcell) versus the FM-PLS signals in the benchtop testing, along with the linear regres- sion fitting. The fitting has an R-square value of 0.9802 and a root-mean-squared-error (RMSE) of 28.59 N.
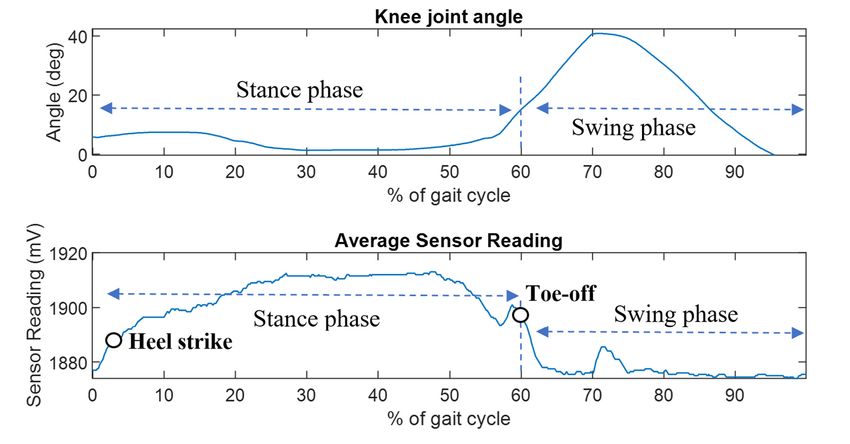
Figure 14. Comparison of sensor readings from numerical simulation and benchtop testing Sensors 2023, 23, 938 FM-PLS during the axial force change. 14 of 18 Figure 15 shows the scatter plot of the reference force (measured by the off-th Figureversus loadcell) 15 shows theFM-PLS the scatter plot of the in signals reference force (measured the benchtop testing,byalong the off-the-shelf with the linear r loadcell) versus the FM-PLS signals in the benchtop testing, along with the linear regression sion fitting. The fitting has an R-square value of 0.9802 and a root-mean-squared fitting. The fitting has an R-square value of 0.9802 and a root-mean-squared-error (RMSE) (RMSE) of 28.59 N.of 28.59 N. 700 600 500 Measured force (N) 400 300 200 100 0 0 100 200 300 400 500 600 700 Reference force (N) Figure15. Figure 15.Linear Linear regression regression of unfiltered of the the unfiltered data from data taken taken thefrom the FM-PLS FM-PLS sensor andsensor and refere reference the-shelf loadcell. off-the-shelf loadcell. 4.2. Testing with Prosthesis The results of the prosthesis treadmill walking experiments are shown in Figure 16, which shows the FM-PLS sensor response during a complete gait cycle along with the relative knee angle measured from the knee prosthesis encoder. A complete walking gait cycle consists of the stance phase (~60% of the cycle) and the swing phase (~40% of the cycle). The stance phase starts with heel contact and ends at toe-off. Hence the average sensor reading of the FM-PLS started to increase at the beginning of the cycle (i.e., heel contact), which is clearly visible from the data shown in Figure 16. A threshold of 1890 mV was empirically selected based on the data for the heel strike detection, and the prosthesis controller switches to the stance phase when the sensor reading is greater than the threshold. Conversely, the sensor reading drops immediately after the toe-off, which is also obvious from the result. The threshold for the toe-off was selected as 1895 mV, below which the controller switches to the swing phase. Both of these thresholds were successfully used by the controller for the seamless switching between stance and swing phases without any misdetection during the prosthesis walking.
thesis controller switches to the stance phase when the sensor reading is greater than the threshold. Conversely, the sensor reading drops immediately after the toe-off, which is also obvious from the result. The threshold for the toe-off was selected as 1895 mV, below which the controller switches to the swing phase. Both of these thresholds were success- Sensors 2023, 23, 938fully used by the controller for the seamless switching between stance and swing phases 15 of 18 without any misdetection during the prosthesis walking. 16. FM-PLS Figurewalking Figure 16. FM-PLS test:walking test: knee knee angle (top angle (top figure), averagereading figure), sensor average sensor reading (middle(middle figure), figure), and sensor and sensor reading reading(bottom difference difference (bottom figure). figure). 5. Discussion 5. Discussion A novel FM-PLS was designed, developed, and tested in this study. The sensor is A novelcompact FM-PLS was and designed,The lightweight. developed, height of theand tested device in this is only study. 25 mm, Thevery adding sensor smallisbuild compact andheight lightweight. The height to the prosthesis of the when device is attached. Theonly 25 mm, unique adding very functioning small build mechanism (magnetic height to thesensing of millimeter-scale prosthesis when attached.deflection of an elastic The unique element) makes functioning the device mechanism more robust (magnetic against interferences sensing of millimeter-scale and drifting. deflection The sensor of an elastic does not element) require makes the highly deviceaccurate placement more robust of magnets as the sensor can easily tolerate misalignment. against interferences and drifting. The sensor does not require highly accurate placement As shown in the benchtop testing results in Figure 11, the FM-PLS is sensitive at light of magnets as the sensor can easily tolerate misalignment. load, which makes it competitive for prosthesis control applications with its capability of reliably detecting the initiation and ending of ground contact. Although the sensor is sensitive at light load, it can still withstand heavy load (5000 N axial force) without structural failure, supported by the FEA analysis shown in Figure 7. The benchtop testing results validated the theoretical analysis by demonstrating similar shapes of the axial load vs. sensor response curve and the axial load vs. magnetic flux curve, as shown in Figure 13. The prosthesis testing data shows that this device can reliably detect the stance phase and swing phase. The sensor signal started to rise immediately after the heel contact and drops after the toe-off as shown in Figure 15. Additionally, sensor signals were used by the prosthesis finite-state controller to successfully trigger the stance and swing phase, which shows great potential of this sensor for real-time powered prosthesis control. Different from the traditional strain gauge-based force sensors, the FM-PLS load sensing is based on the millimeter-scale deflection of an elastic element, which is several orders of magnitude greater than the strain in a typical load-bearing structure. As such, the
Sensors 2023, 23, 938 16 of 18 FM-PLS is expected to provide stronger signals that are more robust against interferences and drifting. Due to the limitation of experimental conditions, the authors were not able to conduct long-term experiments to validate such a hypothesis. Such experiments are planned as an important part of the future work for further validating and improving the sensor performance. When compared against similar millimeter-scale deflection-based load sensing ap- proaches (e.g., [19]), the unique design of the FM-PLS incorporates a dedicated elastic element to measure the load (axial force and bending moment) through its deflection, which is easy and less expensive to manufacture since no high-accuracy machining is needed. The cost of the mechanical and electrical components was ∼$1000, which may further decrease in future mass production. As such, it may become a building block for the future of low-cost, lower-limb prostheses to benefit more amputees in their daily life. On the other hand, because of this dedicated elastic element, the FM-PLS sensor is also slightly bigger and heavier than other state-of-the-art prosthetic load sensors (e.g., [19]). With respect to the sensing performance, the RMSE calculated from the FM-PLS experimental data was 28.59 N and the R-value was 0.9802, while the corresponding values in [19] were 60 N and 0.990, respectively. As such, the FM-PLS performance, based on the available experimental data, is comparable to similar sensors, and a more detailed comparison can be conducted when more data become available. Finally, future work is planned to further validate and improve the performance of the proposed FM-PLS sensor. For the validation of the FM-PLS sensor performance, the authors plan to test the sensor with more sophisticated commercial testing machines to obtain more data on the sensing accuracy, repeatability, and sensor durability. The authors also plan to incorporate the sensor into a robotic lower-limb prosthesis to test its performance in the desired use conditions and characterize the sensor’s reliability and the signals robustness against interferences and drifting. To further improve the sensor performance, structural design may be further improved to reduce the sensor dimensions and improve the sensitivity. Further, wireless communication interface (such as Bluetooth) and an onboard battery may also be introduced to convert the FM-PLS into a wireless sensor, enabling it to serve new applications beyond prosthesis control (gait data collection, activity recognition, etc.). 6. Conclusions This article presents a novel force/torque sensor named FM-PLS. Unlike existing strain gauge-based loadcells, the FM-PLS is based on the measurement of millimeter- scale deflection of an elastic element. The much more significant deflection (compared with the strain of a typical load-bearing structure) may generate stronger sensor signals more robust against interferences and drifting. The design incorporates unique, curved supporting blocks, which modulate the deflection of the elastic member and thus make the measurement sensitive at light load while withstanding heavy load without damage. The FM-PLS prototype is compact and lightweight. With its standard mechanical interface and embedded electronic circuits, the sensor can be easily incorporated into a smart or robotic prosthesis and supply the important structural load information to the prosthesis control system. For the analysis of the sensing mechanism, a two-stage transduction model was established to describe the relationship between the applied force/moment and the output signals. The benchtop testing results match well with the model-driven predictions. To validate its performance, experiments were conducted on a custom testing setup, and the sensor signals displayed a good match to the readings of an off-the-shelf loadcell, as demonstrated by the R-square value of 0.9802 and the RMSE of 28.59 N. Additionally, the sensor was validated through robotic prosthesis walking experiments, and the results showed that the proposed FM-PLS can reliably detect important gait events such as heel strike and toe-off, providing important real-time information to support the intelligent motion control of smart prostheses.
Sensors 2023, 23, 938 17 of 18 Author Contributions: Conceptualization, M.R.H. and X.S.; Design and Development, M.R.H. and X.S.; data collection, M.R.H. and G.B.; writing—original draft preparation, M.R.H.; writing—review and editing, X.S.; supervision, X.S. All authors have read and agreed to the published version of the manuscript. Funding: This research was funded by National Science Foundation, grant numbers 1351520 and 1734501. Data Availability Statement: The data that support the findings of this study are available from the corresponding author, XS, upon reasonable request. Conflicts of Interest: The authors declare no conflict of interest. References 1. Winter, D.A. Biomechanics and Motor Control of Human Gait: Normal, Elderly and Pathological, 2nd ed.; University of Waterloo Press: Waterloo, ON, Canada, 1991; ISBN 978-0-88898-105-9. 2. Orendurff, M.S.; Segal, A.D.; Klute, G.K.; McDowell, M.L.; Pecoraro, J.A.; Czerniecki, J.M. Gait efficiency using the C-Leg. J. Rehabil. Res. Dev. 2006, 43, 239–246. [CrossRef] [PubMed] 3. Prinsen, E.C.; Nederhand, M.J.; Sveinsdóttir, H.S.; Prins, M.R.; van der Meer, F.; Koopman, H.F.J.M.; Rietman, J.S. The influence of a user-adaptive prosthetic knee across varying walking speeds: A randomized cross-over trial. Gait Posture 2017, 51, 254–260. [CrossRef] [PubMed] 4. Thiele, J.; Westebbe, B.; Bellmann, M.; Kraft, M. Designs and performance of microprocessor-controlled knee joints. Biomed. Tech. 2014, 59, 65–77. [CrossRef] [PubMed] 5. Tomashevich, D.; Bobrova, Y. Prosthesis control system of the upper limb. In Proceedings of the 2017 20th Conference of Open Innovations Association (FRUCT), St. Petersburg, Russia, 3–7 April 2017; pp. 451–465. 6. Sup, F.; Bohara, A.; Goldfarb, M. Design and Control of a Powered Transfemoral Prosthesis. Int. J. Robot. Res. 2008, 27, 263–273. [CrossRef] [PubMed] 7. Lawson, B.E.; Mitchell, J.; Truex, D.; Shultz, A.; Ledoux, E.; Goldfarb, M. A Robotic Leg Prosthesis: Design, Control, and Implementation. IEEE Robot. Autom. Mag. 2014, 21, 70–81. [CrossRef] 8. Au, S.K.; Weber, J.; Herr, H. Biomechanical Design of a Powered Ankle-Foot Prosthesis. In Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; pp. 298–303. 9. Discover a New Era of Power. Ossur.com. Available online: https://www.ossur.com/en-us/prosthetics/knees/power-knee (accessed on 26 November 2021). 10. Azocar, A.F.; Mooney, L.M.; Hargrove, L.J.; Rouse, E.J. Design and Characterization of an Open-Source Robotic Leg Prosthesis. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 111–118. 11. Tran, M.; Gabert, L.; Cempini, M.; Lenzi, T. A Lightweight, Efficient Fully Powered Knee Prosthesis with Actively Variable Transmission. IEEE Robot. Autom. Lett. 2019, 4, 1186–1193. [CrossRef] 12. Wu, M.; Haque, M.R.; Shen, X. Obtaining Natural Sit-to-Stand Motion with a Biomimetic Controller for Powered Knee Prostheses. Available online: https://www.hindawi.com/journals/jhe/2017/3850351/ (accessed on 17 February 2020). 13. Gupta, S.V. Strain Gauge Load Cells. In Mass Metrology; Gupta, S.V., Ed.; Springer Series in Materials Science; Springer: Berlin/Heidelberg, Germany, 2012; pp. 89–119. ISBN 978-3-642-23412-5. 14. Pratt, D.J.; Bowker, P.; Wardlaw, D.; McLauchlan, J. Load measurement in orthopaedics using strain gauges. J. Biomed. Eng. 1979, 1, 287–296. [CrossRef] [PubMed] 15. Salibindla, S.; Ripoche, B.; Lai, D.T.H.; Maas, S. Characterization of a new flexible pressure sensor for body sensor networks. In Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, VIC, Australia, 2–5 April 2013; pp. 27–31. 16. Cherelle, P.; Grosu, V.; Matthys, A.; Vanderborght, B.; Lefeber, D. Design and Validation of the Ankle Mimicking Prosthetic (AMP-) Foot 2.0. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 138–148. [CrossRef] [PubMed] 17. Pandit, S.; Godiyal, A.K.; Vimal, A.K.; Singh, U.; Joshi, D.; Kalyanasundaram, D. An Affordable Insole-Sensor-Based Trans- Femoral Prosthesis for Normal Gait. Sensors 2018, 18, 706. [CrossRef] [PubMed] 18. Rouse, E.J.; Mooney, L.M.; Herr, H.M. Clutchable series-elastic actuator: Implications for prosthetic knee design. Int. J. Robot. Res. 2014, 33, 1611–1625. [CrossRef] 19. Gabert, L.; Lenzi, T. Instrumented Pyramid Adapter for Amputee Gait Analysis and Powered Prosthesis Control. IEEE Sens. J. 2019, 19, 8272–8282. [CrossRef]
You can also read

















































