Extensible optimisation framework for .NET virtual machine
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Extensible optimisation framework
for .NET virtual machine
public c l a s s RemoteCallDSOC : Loom . A s p e c t {
p r i v a t e OpDomains opDomains = new OpDomains ( ) ;
p r i v a t e D e l a y e d C a l l s d e l a y e d C a l l s = new D e l a y e d C a l l s ( ) ;
p r i v a t e S e t d e l a y e d C a l l s D e f = new H a s h e d S e t ( ) ;
public RemoteCallDSOC ( DDFAAnalysis a n a l y s i s ) {
t h i s . opDomains = a n a l y s i s . getOpDomains ( ) ;
}
[ Loom . C o n n e c t i o n P o i n t . I n c l u d e A l l ]
[ Loom . C a l l ( I n v o k e . I n s t e a d ) ]
public o b j e c t AnyMethod ( o b j e c t [ ] a r g s ) {
OpDomain thisOpDomain = opDomains . getOpDomain ( C o n t e x t . MethodName ) ;
OpNode opNode = thisOpDomain . OpNode ;
S e t opNodeDef = opNode . g e t D e f s ( ) ;
S e t opDomainUse = thisOpDomain . g e t U s e s ( ) ;
bool f l a g = ( ( ( S e t ) opNodeDef & opDomainUse ) . Count > 0 ) | |
( ( ( S e t ) opDomainUse & d e l a y e d C a l l s D e f ) . Count > 0 ) ;
BSc Joint Maths and Computing
Final Year Individual Project
June 2005
Miloš Puzović
mp1102@doc.ic.ac.uk
Supervisor: Paul Kelly
Second Marker: Susan EisenbachAbstract
Component-based programming is a new programming paradigm where in-
dependent pieces of code are combined together to form the application
program. Most performance improvement opportunities come from adapt-
ing components to their context of use, but these improvements tend to
reduce re-usability, clarity and long-term software value. The purpose of
this work is to change this, so that developers can write programs that
follow component-based programming logic, and a program would be au-
tomatically and transparently transformed into one that is comparable, or
better, in performance to an equivalent application.
This work introduce a domain-specific optimisation component that en-
codes knowledge specific to a particular application domain. The compo-
nent has the access to the results of static data-flow analysis that is sharpen
by control-flow information obtained at run-time. These results are used
by domain-specific optimisation component to find the points in the appli-
cation program that are candidates for the optimisation. At these points
we intercept the execution of the application and apply the optimisation
from domain-specific optimisation component. Initial testing shows that
the framework we present here can result in significant performance gains
for the applications.Contents
1 Introduction 4
1.1 Goals of this project . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 An example of DSOCs . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Organization of the report . . . . . . . . . . . . . . . . . . . . 9
2 Background 10
2.1 Literature review . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1 Microsoft .NET Framework . . . . . . . . . . . . . . . 10
2.1.2 Aspect-oriented programming . . . . . . . . . . . . . . 12
2.1.3 Deferred data-flow analysis . . . . . . . . . . . . . . . 13
2.2 The Veneer virtual machine . . . . . . . . . . . . . . . . . . . 15
2.2.1 Veneer run-time behaviour . . . . . . . . . . . . . . . 16
2.3 Focus of this work . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Related work . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.1 Dynamo: automatic runtime program transformation 19
2.4.2 Data-flow Pointcut in Aspect-Oriented programming . 19
2.4.3 RROpt: the Runtime Remoting Optimizer . . . . . . 20
2.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 Design 21
3.1 Requirement Specification . . . . . . . . . . . . . . . . . . . . 21
3.2 Individual Design Phases . . . . . . . . . . . . . . . . . . . . 22
3.2.1 Assembly Analysis . . . . . . . . . . . . . . . . . . . . 22
3.2.2 Static Analysis . . . . . . . . . . . . . . . . . . . . . . 23
3.2.3 Interface Construction . . . . . . . . . . . . . . . . . . 23
3.3 Design Overview . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.1 The Integrated System . . . . . . . . . . . . . . . . . . 24
3.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Implementation 26
4.1 Assembly analysis . . . . . . . . . . . . . . . . . . . . . . . . 26
4.1.1 The Adon library . . . . . . . . . . . . . . . . . . . . . 26CONTENTS 2
4.1.2 Instruction blocks . . . . . . . . . . . . . . . . . . . . 28
4.1.3 Control-flow analysis for instruction blocks . . . . . . 30
4.2 Data-flow analysis . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.1 Storing data-flow information . . . . . . . . . . . . . . 31
4.2.2 Deferred data-flow analysis . . . . . . . . . . . . . . . 32
4.3 The interface . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3.1 Rapier-Loom.NET . . . . . . . . . . . . . . . . . . . . 34
4.3.2 Domain-specific optimisation component . . . . . . . . 34
4.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5 Evaluation 37
5.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.1.1 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.1.2 Experimental setup . . . . . . . . . . . . . . . . . . . . 38
5.2 Prefetching for distributed shared memory . . . . . . . . . . . 40
5.3 Remote call aggregation . . . . . . . . . . . . . . . . . . . . . 42
5.3.1 Optimisation . . . . . . . . . . . . . . . . . . . . . . . 42
5.3.2 Domain specific optimisation component . . . . . . . . 44
5.3.3 A benchmark . . . . . . . . . . . . . . . . . . . . . . . 46
5.3.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.4 SELECT * statements . . . . . . . . . . . . . . . . . . . . . . . 52
5.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6 Conclusion and Future Work 55
6.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.2 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.2.1 Further testing . . . . . . . . . . . . . . . . . . . . . . 57
6.2.2 Building a new interface . . . . . . . . . . . . . . . . . 57
6.2.3 Metadata creation . . . . . . . . . . . . . . . . . . . . 57List of Figures
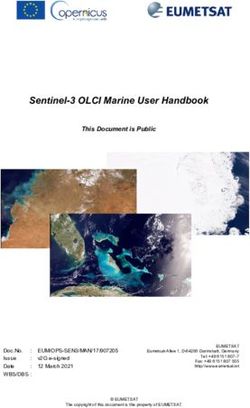
1.1 Graph of the execution times for the code optimised using the
remote call aggregation optimisation and the unoptimised code 7
2.1 An overview of .NET framework . . . . . . . . . . . . . . . . 11
2.2 The control-flow graph after the builder phase of deferred
data-flow analysis has been completed . . . . . . . . . . . . . 15
3.1 Assembly analysis . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2 Static analysis and builder phase . . . . . . . . . . . . . . . . 23
3.3 The process of applying optimisation(s) to the application . . 24
3.4 Design overview . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.1 Classes used to represent methods from assembly . . . . . . . 27
4.2 Class diagram for building instruction blocks . . . . . . . . . 29
4.3 Class diagram for deffered data-flow analysis . . . . . . . . . 32
5.1 The pseudo-code used for the bulk-prefetching application
benchmark on left, while shaded areas on right present the
op-nodes and the lp-regions identified in the pseudo-code . . 39
5.2 Demonstrates the stitcher algorithm when b = 3, c != 0 . . 39
5.3 Graphs of network traffic for the vector addition benchmark,
with and without the remote call aggregation optimisation . . 49
5.4 Graph of the execution time for the vector addition bench-
mark run over the local loopback device . . . . . . . . . . . . 50
5.5 Graph of the execution time for the vector addition bench-
mark run over the 100MBit Ethernet network . . . . . . . . . 51
5.6 Graph of the execution time for the vector addition bench-
mark run over the modem connection . . . . . . . . . . . . . 51Chapter 1
Introduction
In the past decade useful software has became far more complex then ever
before. Building software is no more an art practiced by skilled individuals
in isolation. Nowadays it is a group activity, based on ever increasing so-
phisticated underlying infrastructure. A new programming paradigm, com-
ponent software, has been devised to support this trend, where independent
pieces of code are combined together to form the application programs [20].
By combining independent components applications programs can be built
more quickly. However, this new paradigm introduces new demands on pro-
gramming tools and the software development process.
There are many abstractions available that make component-based pro-
gramming easier, but none of them are able to perform optimisations that
are specific to the application program or the component. This typically
forces the application developers to conform to one of several performance-
oriented design patterns, which may or may not be a fit for the component-
based programming logic.
The goal of this work is to change this, so that developers can write
programs that follow component-based programming logic, and a program
would be automatically and transparently transformed into one that is com-
parable, or better, in performance to an equivalent application that conforms
to the performance-oriented design patterns.
1.1 Goals of this project
Most performance improvement opportunities come from adapting compo-
nents to their context of use, but the performance improvement measures
tend to reduce re-usability, clarity and long-term software value. Thus, the
art of performance programming is to understand how to design and com-
pose components so this doesn’t happen. In this work we have attacked this
problem by automating the adaptation of components to their context.
The ultimate goal of this work is to support cross-cutting domain-specific1.2 An example of DSOCs 5
optimisations components (DSOCs) that are separable and re-usable. To
make this work feasible we need to have a marketplace of DSOCs that will
encode knowledge specific to a particular application domain, component
family or API [8]. Also, we need to provide a domain-specific optimization
plug-in framework for compiler or virtual machine that will adapt compo-
nents to their context based on DSOCs. For example, we could have a
DSOC that encodes knowledge about remote calls and decides whether two
or more remote calls can be aggregated and sent together to the remote
server in order to reduce the call overheads. Then this DSOC will be used
by the provided domain-optimization framework to optimize remote calls.
Hence, the developer can concentrate more on re-usability, clarity and long-
term software value of her components.
The ultimate goal, described above, gives us the following main goals of
this work,
• DSOC plugin API. To provide a proof-of-concept study that show
it is possible to implement a software interface that enables develop-
ers to encode knowledge specific to a particular application domain,
component family or API. The software interface that encodes this
knowledge is called a domain-specific optimization component.
• DSOC plugin framework. To realize the adaptation of components
to their context specified by the domain-specific optimization compo-
nents in such a way that time overheads introduced by the program
transformation are kept at the minimum. In other words, design an
extensible domain-specific optimization framework for compiler or vir-
tual machine.
1.2 An example of DSOCs
To give a flavor of what is a domain-specific optimization component, this
section will introduce one example. The DSOC in this example will encode
knowledge necessary to perform the optimization of the remote calls by
aggregating them.
The software interface that will encode this knowledge will be an aspect
because, by definition, aspects allow us to declare additional and modified
behaviour of the program during its execution. For concreteness of the
discussion, the software interface represented here is loosely based on the
AspectJ’s pointcut-and-advice mechanism [2]. Parallels between this As-
pectJ’s mechanism and the mechanism used in this project are shown in
the [18], while an introduction to aspect-oriented programming is given in
the Chapter 2. The following is an example DSOC, which optimizes remote
calls by aggregating them:1.3 Approach 6
1 aspect R e m o t e C a l l O p t i m i z a t i o n {
OpDomains opDomains = new DDFA(new F i l t e r (new RemoteMethod ( ) ) ) ;
3 C o n t e x t L i s t d e l a y e d C a l l s = new C o n t e x t L i s t ( ) ;
5 pointcut remote ( ) : c a l l ( ∗ ∗ . ∗ ( . . ) throws RemoteException ) ;
7 void around ( ) : remote ( ) {
OpDomain thisOpDomain = opDomains . getOpDomain ( t h i s J o i n t P o i n t ) ;
9 OpNode opNode = thisOpDomain . getOpNode ( ) ;
i f ( thisOpDomain . g e t U s e s ( ) . i n t e r s e c t s ( d e l a y e d C a l l s . g e t D e f s ( ) | |
11 thisOpDomain . g e t U s e s ( ) . i n t e r s e c t s ( opNode . g e t D e f s ( ) ) {
delayedCalls . execute ( ) ;
13 proceed ( ) ;
}
15 else {
d e l a y e d C a l l s . add ( opNode . g e t C o n t e x t ( ) ) ;
17 }
}
19 }
In line 2 we have divided the application that we want to optimize into
code blocks such that each code block consists of one remote call and all
statements reachable from that remote call that are not passing through an-
other remote call, while in line 3 we have created an object that keeps the list
of delayed calls together with necessary information to execute those calls.
Each code block has data-flow information associated with each statement.
Out of all well-defined points in the program execution line 5 selects only
points that are remote calls. In Java each method that throws Remote-
Exception exception is a remote method. Implementation of remote call
aggregation starts at line 7 and it is in the form of around advice, because
we want to have a chance to decide where and when we want to execute the
joint point, i.e. remote call. Firstly, we find a code block that has a selected
joint point as its member (line 8) and secondly, we create an object that has
data-flow information for the joint point (line 9). At line 10 we check if uses
of variables in the selected code block intersect with those defined by delayed
calls or the selected joint point. If they don’t intersect we can delay the call
(line 16), otherwise we need to execute delayed calls (line 12) and selected
joint point (line 13) or we will get semantically incorrect application.
By sending remote calls in groups to server for the execution we are
reducing the total amount of network traffic and therefore reducing the
total execution time of remote calls. Figure 1.1 shows the execution times
for the unoptimised code and the optimised code.
1.3 Approach
To support cross-cutting domain-specific optimizations that are separable
and re-usable it was decided to represent them as aspects. These aspects
consist of pointcut and an advice. A pointcut picks a set of joint points
based on the defined criteria. The selection of the joint points can be per-1.3 Approach 7
Figure 1.1: Graph of the execution times for the code optimised using the
remote call aggregation optimisation and the unoptimised code
formed either at the compile-time or the run-time giving us a static part
and dynamic part of a pointcut. An advice encodes knowledge specific to a
particular component family and it is used by the domain-specific optimi-
sation framework to adapt the component family to its context. Results of
data-flow analysis, for example liveness analysis, can be used in pointcuts
and in advice. The following approach has been taken to achieve the goal.
• Creation of domain-specific optimization components requires use of
program analysis techniques to identify dependences in components or
program segments. We provide a deferred data-flow analysis (DDFA)
as our dependence analysis tool. This analysis is divided into two
phases: builder, performed at compile-time and stitcher, performed at
run-time. During the builder phase we identify potential joint points
based on pointcuts. These joint points will induce a fragment that
consists of all statements reachable from the joint point that are not
passing through another joint-point or program-exit node. Then we
generate static data-flow summary information for each fragment. At
run-time DDFA stitches together static data-flow summary informa-
tion based on actual control flow to enhance accuracy.
• This work extends DDFA’s stitcher phase with a dynamic aspect we-
aver, because in many performance opportunities it is desirable to
postpone the decision whether aspect information is to be added or1.3 Approach 8
not to a particular component until program runtime. Hence, during
this phase we dynamically interweave previously defined aspects with
functional component code at the selected joint points. After we have
completed interweaving we get the modified component that is adapted
to its context.
• It is essential to have an interface in which the domain-specific opti-
mization components are going to be written. This work implements
a simple interface as an extension of the aspect language. In this in-
terface we have extended the pointcut language to provide access to
both static and dynamic data-flow analysis. Advice can also query
the data-flow analysis. The aim of this extension was to use data-flow
analysis as knowledge decoder of the context of component.
• We demonstrate the practical use of domain-specific optimization com-
ponents and automated adaptation of components to their context
based on the domain-specific optimization component using suitable
experiments.
Accomplishments of this project are,
• Extending static analysis with dynamic information using de-
ferred data-flow analysis and rescuing data-flow information thrown
away by the conservative static analysis. This extension minimizes
overheads due to control flow interception. This interception is derived
from information needed by the particular aspect. If we can predict
control flow at the point of use, then runtime data-flow information is
maximised and control flow interceptions minimized.
• Introducing aspects as domain-specific optimisation components.
Performance opportunities usually affect multiple classes and cut across
the typical division of responsibility. Therefore, we have used aspects
to encapsulate this behavior giving us separable and re-usable compo-
nents.
• Providing a software interface for writing domain-specific optimi-
sation components. This interface uses static and dynamic data-flow
information to decode knowledge about the context of the component.
It is then used by the dynamic aspect weaver to adapt the compo-
nent to its context. Providing pointcuts and advice with data-flow
information is the main feature of this interface.
• Demonstrating the usability of the implementation using the
suitable experiments such as remoting aggregation shown in this chap-
ter.1.4 Organization of the report 9
1.4 Organization of the report
• Chapter 2 (Background) is an introduction to various aspects of the
project and background reasearch that lead to the approach taken by
this work.
• Chapter 3 (Design) describes design decisions taken at the early stage
of the project and identifies the primary design phases.
• Chapter 4 (Implementation) details the implementation of each design
phase.
• Chapter 5 (Experimental evaluation) provides tests and results of the
usability of the implementation.
• Chapter 6 (Conclusion and Future Work) points out the achievements
of the implementation, possible improvements for the implementation
and directions for the future work.Chapter 2
Background
This chapter serves as an introduction to the key terms and concepts used
through this project. Firstly, it provides a summary of the background
literature that forms the basis for this work. It describes in sufficient depth
the work on which this implementation is built. Secondly, it discusses the
related work in this field and compares it to the work done in this project.
2.1 Literature review
This section reviews the literature related to this project. It includes a gen-
eral overview of Microsoft .NET framework and aspect-oriented program-
ming as metaprogramming tool. It describes disadvantages of conservative
data-flow analysis and introduces deferred data-flow analysis that overcomes
them.
2.1.1 Microsoft .NET Framework
Microsoft .NET Framework is a new and exciting integral Windows com-
ponent for software development and deployment. It has been live since
version 1.0 that was released in January 2002. The .NET Framework [14]:
• Supports over 20 different programming languages.
• Manages much of the plumbing involved in developing software, en-
abling developers to concentrate more on the core business logic code.
• Makes it easier than ever before to build, deploy and administer secure,
robust, and high-performing applications.
Therefore the .NET Framework embodies design goals that are both prac-
tical and ambitious. They consists of support for components, language
integration, application interoperation, simplifed development, improved re-
liability, and greater security. The solid component model played a major2.1 Literature review 11
Figure 2.1: An overview of .NET framework
part in decision of choosing this framework. In .NET world all classes are
ready to be reused at the binary level, since they are part of an assembly.
These are the clear units of development, deployment and versioning. Thus
our domain specific optimization component described in the Section 1.1
will have the form of an assembly. The .NET Framework is composed of the
common language runtime and a unified set of class libraries.
Common Language Runtime
The common language runtime (CLR) is the most important component
of the framework. It is responsible for run-time services such as object
activation, object execution and garbage-collection of objects. In addition,
the CLR has a role at development time when features such as life-cycle
management, strong type naming, cross-language exception handling, and
dynamic binding reduce the amount of code that developer must write to
turn the business logic into a reusable component.
A functional subset of the CLR, known as the Common Language In-
terface (CLI) has been accepted in April, 2003, by the International Orga-
nization for Standardization and the International Electrotechnical Comit-
tee (ISO/IEC) as an international standard. This standardization provided
third party developers with a chance to develop their own versions of the
CLR for different platforms, such as Mac OS X and Linux.
The CLR supports any language that can be represented in its Common
Intermediate Language (CIL). Most of the time this code is run in the man-
aged mode, which means that garbage collection and array bounds checking
is performed by the CLR. There is also an unmanaged mode where the CIL
code is allowed to perform unsafe and insecure operations such as pointer
arithmetics. Finally, there is a simple interface for calling native code within
DLLs. Native code is by definition unmanaged.2.1 Literature review 12
Class Libraries
Basic framework classes libraries provide rudimentary input and output
functionality, string manipulation, security manager, network communica-
tion, thread management, text management, reflection functionality, collec-
tion functionally, user interface design features, as well as other functions.
On the top of the basic framework classes is a set of classes that extend
base classes to support data and XML management. One of those classes
are ADO.NET classes that enable developers to interact with data accesses
in the form of XML through the OLE DB, ODBC, Oracle, and SQL Server
interfaces. Further to this there are classes that enable XML manipulation,
searching and translation.
Finally, classes in three different technologies (Web services, Web Forms
and Windows Forms) extend framework base classes and data and XML
classes. Web services include classes for development of web-based applica-
tions, while Web Forms include classes for development of web Graphical
User Interface (GUI) applications. Web Forms support classes that let you
to develop native Windows GUI applications.
2.1.2 Aspect-oriented programming
Metaprogramming is concerned with writing metaprograms. Metaprograms
are programs that operate on other programs. Compilers and interpreters
can be regarded as a type of metaprograms. Metaprogramming is an um-
brella term that encompasses a large and diverse range of subjects such as
reflection and multi-stage programming. One of example of metaprogram-
ming is aspect-oriented programming (AOP).
Each application can be regarded as a collection of implementation of
ideas or concerns. Some concerns can be implemented as a programming
module or as a collection of programming modules. Other concerns can-
not be implemented as a set of programming modules. These concerns are
referred to as crosscutting concerns. In order to implement crosscutting
concerns it is required to add additional program fragments to the other
concerns. Typical crosscutting concerns include logging, context-sensitive
error handling, performance optimization and design patterns. For exam-
ple, when adding the logging support to the application it is necessary to
insert logging statements at the various points throughout the application.
This approach is laborious and error-prone. It also lacks the modularity,
because if we want to change the printouts of logging statements we would
have to change each of them.
The need for crosscutting concerns was discovered as early as in the 1970s
in the seminal paper by Fouxman, while AOP originated in the 1990 by the
group at the Xerox Palo Alto Research Center led by Gregor Kiczales [9].
They have developed the first AOP tool, AspectJ [2], based on Java. There2.1 Literature review 13
are also .NET-based AOP tools such as LOOM.NET [18] that was devel-
oped by Hasso-Plattner-Institute in Germany. The AOP web site contains
a variety of other references.
The idea behind the AOP is to modularize crosscutting concerns into
reusable modules. These reusable modules are known as aspects. Aspects
are very similar to the classes in their declaration, but in addition aspects
contain pointcuts and advices. Each application has joint points. Joint
points represent well-defined points in the program’s execution. Examples of
joint points are method calls, access to the class members and the execution
of exception handlers blocks. Then a pointcut is a language construct that
selects a set of joint points based on the defined criteria. For example, we
can define a pointcut that selects the execution of all remote procedure calls.
An advice is the code defined relative to a pointcut that executes before,
after, or around a joint point. The first two types of advice are simple, they
either execute before the joint point or after the joint point. The third type
of advice, around, gives the aspect writer a chance to decide whether and
when the joint point is going to be executed. Example of the around advice
was given in the Section 1.2.
For aspects to affect regular class-based code, they need to be woven into
the code they modify. Weaving can be performed before the program starts
(static weaving), at load-time (load-time weaving) and after the class has
been loaded (dynamic weaving). Static weaving has the advantage, because
it doesn’t add any run-time penalties to the program’s execution. Aim of
this project is to adapt the applications to their context. If a program is
available as a source code and the code is stored locally then we have a fully
controlled context, thus we can use static weaving. Otherwise parts of the
program are generated at the run-time, hence we have a partly controlled
context so the dynamic weaving needs to be used.
The .NET implementation of aspect-oriented programming used in this
project as well as the choice of the weaving technique is described in the
Chapter 3 and Chapter 4.
2.1.3 Deferred data-flow analysis
There are different types of optimizations. Optimizations found in the main-
stream compilers are usually of the static variety, where a block of code
is replaced by another that performs better, but produces the same re-
sult for every possible case. Examples of such optimizations are thoroughly
explained in the standard compiler texts [1]. However, many modern opti-
mization techniques are dynamic, because they require some form of runtime
support.
To perform more aggressive optimizations it is necessary to work around
the limits of static data-flow analysis. Static data-flow analysis lose infor-
mation at the branch points, because it must conservatively combine data2.1 Literature review 14
from the various branches. For example, if one branch only uses a variable
A, while the other branch only uses a variable B, then both variables, A
and B, will be identified as being used at the branch point although only
one of them will be used during the execution of the program. If the branch
that will be taken is known beforehand, it would be possible to optimize the
program more aggressively by knowing which of A and B is live. Sharma et
al. [19] used this concept to introduce deferred data-flow analysis (DDFA).
In this section, we will give a brief overview of DDFA’s terms and con-
cepts needed to follow the rest of this dissertation. Details on the imple-
mentation of DDFA are given in the Chapter 4.
DDFA framework is targeted to the optimization of heavy-weight opera-
tions, such as remote procedure calls. Let denote such operations by op and
node in the control-flow graph corresponding to the operation by op-node.
This node induces an op-domain that consist of all nodes reachable from op-
node that are not passing through another op-node or program-exit node.
Node that induces this domain is called the entry node, while the exit node
is another op-node or program-exit node.
Each op-domain is going to have zero or more forks. Forks are well
defined program points from which the control flow of the program can flow
in more than one direction. If the incident edges from the fork in the control-
flow graph don’t have the same data-flow attributes than fork is defined to
be lossy. If it can be determined at the op-node at the runtime which
control-flow will fork take than fork is defined to be predictable. Fork that
is lossy and predictable is lp-fork. In the conservative analysis, information
is lost at the lp-forks although we can predict the control flow direction at
runtime. Hence if we defer the meet operation on the lp-forks until runtime
we will not lose any information.
The lp-fork induces lp-region which consists of all nodes reachable from
lp-fork that are not passing through another lp-fork or any exists of op-
domain. An lp-region may contain zero or more other forks. These forks
are neither lossy nor predictable, hence we will not gain in information if we
defer data-flow analysis on these forks until runtime.
After the terms and concepts have been introduced, we will now explain
how DDFA works. The first stage of DDFA identifies all op-nodes in the
control-flow graph and constructs op-domains. Then within each op-domain,
lp-forks are identified and lp-regions are constructed. In the second stage,
we analyze each lp-region and create summary transfer function φ for each
control-flow direction that lp-fork can take. The summary transfer function
summarizes backward data-flow operations that would occur if control flowed
in one direction. If there are no lp-forks in the op-domain we simply perform
the conservative control-flow analysis. The identifications of op-nodes and
analysis of lp-forms are performed at the compile-time.
The third and fourth stage of DDFA are executed during the runtime
of the application program when the control reaches the entry to the op-2.2 The Veneer virtual machine 15
domain. At this point we know the directions of all lp-forks in the op-domain
induced by the op-node we want to optimize and therefore the sequence of
lp-region that are going to be encountered during the execution of the body
of op-domain. This information is going to be used at the joint-point to
stitch together summary functions from lp-regions in reverse order using
the work-list algorithm. In the final stage we are going to use the data-flow
information computed by the stitcher to make optimization decision.
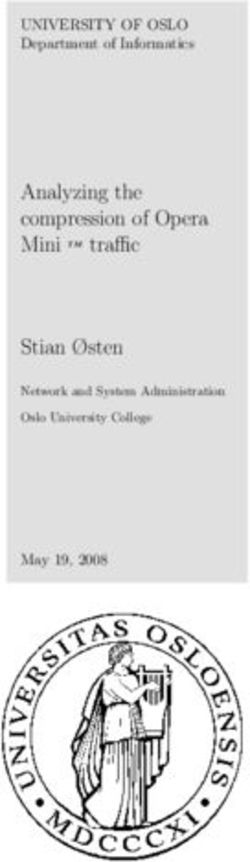
Figure 2.2: The control-flow graph after the builder phase of deferred data-
flow analysis has been completed
Advantage of DDFA over conventional data-flow analysis can be seen
on the remote procedure call aggregation example. The example is shown
in Figure 2.2. Let the remote procedure call that defines variable r be op-
node that induces op-domain with one lp-fork. One branch of lp-fork uses
variable r, while the other branch is executing some other remote procedure
call. Using the conventional data flow analysis at the branch point variable
r will be live, hence we will need to force the execution of the remote call at
the op-node. On the other hand, with DDFA, at the op-node we will know
which branch will be taken. If the branch that uses variable r is not taken,
we can delay the execution of the remote call at the op-node and aggregate
it with other remote calls.
2.2 The Veneer virtual machine
Venner [23] is a domain-specific optimization framework for Java developed
as a part of a Ph.D. dissertation. In simple terms, its author describes Veneer
as a drop-in substitute for a standard virtual machine that is transparent
from the perspective of the end user. It sits between the client applica-2.2 The Veneer virtual machine 16
tion and a standard virtual machine intercepting the control flow of meth-
ods in the application. These methods are referred as intercepted methods.
The original body of the method is removed and replaced by a stub, while
the control-flow graph of the original method is stored in a data structure
known as an execution plan. The user of this framework can write simple
interpreters called executors that execute method plans from plan-sets. Each
method plan is a representation of the method body composed of code blocks
called fragments and consists of related metadata (such as variable liveness
information) that can be calculated statically. A plan-set is a structure that
collects together all plans associated with methods in the same class. The
power of Venner lies in the fact that by implementing different executors it
is possible to deviate from the standard behavior of the virtual machine. For
example, it may inspect and modify code belonging to the method, modify
the control flow of the method etc.
2.2.1 Veneer run-time behaviour
In this section we will explore how the body of the method is transformed
into a plan via a fragmentation process and explain the structure of the
executors.
The fragmentation process
First step is to determine what methods are going to be intercepted by
Veneer. This is determined by an interception policy selected by the user.
This policy is responsible for determining which classes and methods are
going to be intercepted.
If a method is to be intercepted, then original body of the method is
removed completely and replaced by a stub. Stubs serve as entry-points into
Veener. When stub is called, it fetches a suitable executor and execution
plan for the method and calls the executor passing in the plan. After the stub
has been generated, a new plan is created for the method. This plan consists
of a code blocks. Code blocks are encapsulated sections of the code that may
be executed at any time by the executor. There are two main categories of
them - parameterised blocks and fragments. Parameterised blocks usually
represent a single statement, such as a method call, an if statement or an
assignment statement. These blocks are usually of interest to the executor
writer and their behaviour may be modified at run-time. Hence, they are
interpreted by Veneer. Fragments are fixed sections of code that executor
writer is not interested in modifying at run-time. Thus, they are interpreted
by the underlying virtual machine and they can run at the full speed. To
determine fragmentation within the method Veneer is using another active
policy selected by the user - fragmentation policy. For example, it may
determine where parameterised blocks and fragments should occur.2.2 The Veneer virtual machine 17
After the plan has been created, it is necessary to determine the control-
flow between the blocks. This is done by searching for the branch statements
within the each block. For every branch statement found, the code block
that contains the destination statement is located and added to the next-
block list associated with the current block.
For every code block created, a fragment class with a single execute
method containing the code from the code block is generated. This method
is called by its corresponding code block within the plan. The fragment
method consists of a prologue and an epilogue. The prologue sets up the
stack frame with local and global variables into a form suitable for executing
the next fragment. Data structure method state is used to hold the local
and global variables used by a method between executions of the code blocks
in a plan. Since the stack frame is set up by the prologue, the code from
the code block can be executed. If during the execution of the code block
there is a branch to the statement that is not within the current code block,
current code block is replaced by the code block that contains the destination
statement followed by a jump to the epilogue. An epilogue is an operation
that reverses the effect of the prologue. It stores the current state of the
stack frame back to the method state object.
Final step in the fragmentation process is a metadata generation. To
every code block we can assign additional information that can be calculated
statically and later used at the run-time to make optimization decisions.
Veneer supports information such as line numbers and variable definitions.
Also, use and liveness information are provided.
Executors
Veneer provides the user with an opportunity to specify how the execution
of the intercepted method should proceed by writing a simple interpreter.
This simple interpreter is called an executor.
An executor is built by extending the abstract class Executor. The main
task of the developer is to implement the abstract method execute. Before
the control reaches this method various attributes of the Executor class are
initialized. The most important attributes are:
1. getCurrentPlan - returns the plan representing body of the method,
2. getCurrentBlock - returns the current block and
3. getCurrentState - returns the current method state.
To make any progress the execute method of the current code block
needs to be called, passing in the executor. By passing the instance of
the executor the code block will have all the necessary information needed
to execute itself. After the code block has been executed it will change
to value of the current block to the block that is next in the control-flow2.3 Focus of this work 18
graph and will return the control to the execute method of the abstract
class Executor. Between block execution, the executor is allowed to do
anything that is permissible within the Java environment. For example, it
may decide to modify the current plan, which will result in changes to the
method implementation. An example of a simple executor that executes a
plan without any changes is given below (from [22]).
public c l a s s B a s i c E x e c u t o r extends E x e c u t o r {
public i n t e x e c u t e ( ) throws E x c e p t i o n {
while ( ! ( i s F i n i s h e d ( ) | | l o c k W a s R e l e a s e d ( ) ) ) {
try {
// E x e c u t e t h e c u r r e n t b l o c k
getCurrentBlock ( ) . execute ( this ) ;
} catch ( E x e c u t e E x c e p t i o n e ) {
// Pass c o n t r o l t o e x c e p t i o n h a n d l e r
gotoExceptionHandler ( e ) ;
// P r o p a g a t e e x c e p t i o n i f no h a n d l e r
if ( isFinished ())
throw e . g e t E x c e p t i o n ( ) ;
}
}
return n e x t ;
}
}
2.3 Focus of this work
This work started as an idea to do for .NET what Veneer did for Java, but
as a result of background research a different approach has been taken. This
work differs in two major respects to Veneer. Firstly, Veneer performs con-
servative compile-time data-flow analysis, here we perform a limited form of
runtime data-flow analysis called deferred data-flow analysis (DDFA) and
explained in section 2.1.3. Loss of precision due to the conservative data-
flow analysis increases number of fragments in Veneer, thus increasing time
overhead to interpret the method plans. Using DDFA data-flow analysis
is sharpened using control-flow information available at the runtime result-
ing in smaller fragmentation set. Secondly, instead of implementing virtual
.Net virtual machine to gain control over the method control-flow of the ap-
plication we will use one of the existing implementation of aspect-oriented
programming on .Net. This approach will decrease time overheads intro-
duced in Veneer by adding additional execution layer. Hence, code shown
above for the executor will be replaced with the code shown in the section
1.2.2.4 Related work 19
2.4 Related work
This section discusses the research work that is related to this project and
compares it to the work done here.
2.4.1 Dynamo: automatic runtime program transformation
Dynamo [4] is a dynamic optimisation system running on PA-RISC based
workstation running HP-UX. During the execution of the program, Dynamo
builds up an instruction trace. If the instruction trace is identified as a ’hot’
(for example, the trace is often used) the trace is compiled into the fragment
and run through the optimizer. Next time when the control reaches the point
marked as the beginning of the hot instruction trace, Dynamo will pass the
control to the optimized fragment. If within the optimized fragment there
is a point to the other optimized fragment, Dynamo will immediately jump
to the other optimized fragment without giving the control back to the
executing program. Thus, run-time penalty that occurs during the control
switching will be reduced to the minimum.
This work differs only in environment and usage from Dynamo, while
the underlying principle is practically identical. Dynamo operates at the
machine-code level. In this work we operate on Common Intermediate Lan-
guage (CIL) explained in the section 2.1.1. The advantage of using the CIL
is that its high-level nature makes program analysis easier to implement.
The disadvantage is that once the CIL code has been loaded into the virtual
machine it is not possible to truly change the code. In order to overcome
this a new code needs to be generated and everything needs to point in the
direction of the new code.
Dynamo is only concerned with extracting maximum performances from
the software. In this work, we give the opportunity to the developer to write
her own performance enchancers using the aspect-oriented programming.
2.4.2 Data-flow Pointcut in Aspect-Oriented programming
Hidehiko Masuhara and Kazunori Kawauchi has proposed a data-flow-based
pointcut for aspect-oriented programming languages [12]. Their pointcut
specifies where aspects should be applied based on the origins of values
and it is designed to be compatible with the other kinds of pointcuts in
existing AOP languages. They have identified the security as a primary
application field for this extension of AOP, because the flow of information
is very important in the security.
Two new pointcuts are added to the syntax of pointcut language. The
first pointcut, dflow[x,x’](p), matches a statement if there is a dataflow
from x to x0 , where variable x is bound to a value in the current joint point,
while variable x0 is bound to a value in a previous joint point that matches2.5 Summary 20
p. The second pointcut, returns(x), binds a return value from the joint
point to x.
In this work we have also extended the pointcut language of aspect-
oriented programming languages. A new pointcut proposed in this work
specifies where aspects should be applied based on the usage of variables
in the op-domain that were defined in the op-node. While Masuhara and
Kawauchi are using the forward data-flow to base their decision on which
aspect to apply, here we are using the backward data-flow as explained in
the section 2.1.3.
2.4.3 RROpt: the Runtime Remoting Optimizer
The Runtime Remoting Optimizer was developed as a part of MSc disserta-
tion [6]. This was the first attempt to ’port’ the architecture of Veener to the
Microsoft .NET framework, but during the course of the project a different
approach was taken. It was decided to implement RROpt within the virtual
machine itself, rather as a virtual virtual machine. RROpt was implemented
by modifying the interperter of Mono, the open-source implementation of
CLI by Ximian. The idea was that rather than passing control back and
forth between the fragment methods and the executor, the optimisations
could be written in the interpreter which has control at every bytecode in-
struction. The implementation was tested on the remote call aggregation
problem.
The main disadvantage of RROpt is that it is not extensible. If you
would like to perform some other run-time optimization except remote call
aggregation, you would have to modify the interpreter on your own. In this
work by using the aspect-oriented programming we have made our opti-
mization framework extensible such that every person with a knowledge of
aspect-oriented programming is able to write an aspect that would perform
the required run-time optimization. Another shortcoming of RROpt is that
it is unable to eliminate unneeded return values, because it doesn’t perform
the data-flow analysis. In this work optimization decisions are based on
the data-flow analysis, thus any unneeded values or shared values will be
detected.
2.5 Summary
This chapter,
• presents the survey of literature related to this work.
• describes the focus of the project.
• lists the related work from different research areas.Chapter 3
Design
In this chapter a detailed description of the core design decisions that were
considered in the early stages of the project is given. It describes the overall
strategy with approaches taken for this project and why they were cho-
sen. We start the chapter by stating the requirement specification in order
to achieve the desired goals. Then we break the requirement specification
into individual design phases such that each phase aims at meeting spe-
cific requirements. For each individual phase we present the essential design
features of building blocks and illustrate how these building blocks are com-
posed together to form the required system. We leave the explanation of
implementation of building blocks for Chapter 4.
3.1 Requirement Specification
The basic requirements for a system, in order to achieve the desired goals
described in the Section 1.1, can be listed as follows,
• Accept the user’s application in the form of the Common Intermediate
Language (CIL) using one of the existing libraries for analysing assem-
blies1 . This involves identifying the methods within the assembly that
are candidates for the optimisation and preparing the assembly for
data-flow and control-flow analysis.
• Capability to find the statements in the application that can be op-
timised. Perform the conventional data-flow analysis on them that
will later be sharpen by using the control-flow information obtained
at run-time.
• An interface able to specify at what points to intercept the execution
of the application and use the information obtained from the deferred
data-flow analysis to make the optimisation decisions.
1
From now on by assembly we refer to the .NET assembly3.2 Individual Design Phases 22
3.2 Individual Design Phases
It has been decided to divide the overall design into three individual phases.
Each of these phases will target one of the specific requirements described
above. In this section we briefly describe each of these individual phases
and present a flow diagram for each one of them.
3.2.1 Assembly Analysis
In this phase we prepare assemblies that are written in the Common In-
termediate Language (CIL) for the data-flow and the control-flow analysis.
The virtual execution system of .NET framework is a simple stack-based
machine consisting of an instruction pointer, a stack pointer and an array
of arguments and an array of locals. In order to simplify the data-flow and
the control-flow analysis instructions from the assembly will be grouped into
the instruction blocks such that before and after any instruction block the
number of operands on the stack will be equal to zero. Further to this, in
assembly analysis phase we also identify methods that are candidates for
the optimisation using the user’s policy. Only the instructions from these
methods we group into the instruction blocks. Figure 3.1 shows the flow
diagram of the assembly analysis. Using the user’s policy, assembly analy-
sis identifies the candidate methods for the optimisations and then for each
of them create instruction blocks. In the Section 4.1 we have described in
detail how this phase has been implemented.
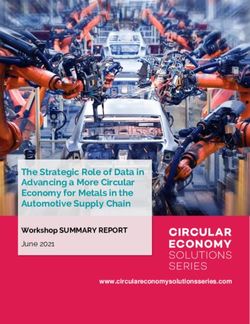
Figure 3.1: Assembly analysis3.2 Individual Design Phases 23
Figure 3.2: Static analysis and builder phase
3.2.2 Static Analysis
Static analysis phase performs data-flow analysis and control-flow analysis
on the instruction blocks obtained from the previous phase. These analysis
must be performed at the compile-time or just before the execution of the
user’s application. In our design we have decided to perform this analy-
sis just before the execution of the user’s application. Except the standard
static analysis, in this phase we also perform the builder phase of the deferred
data-flow analysis as explained in the Section 2.1.3. Additional information
passed to the builder phase are instructions in the program that will act as
op-nodes. The results of static analysis and builder phase are kept in the
data structures that can be accessed during the execution of the user’s appli-
cation. Figure 3.2 shows the flow diagram for performing the static analysis
and builder phase of deferred data-flow analysis on the instruction blocks,
while the Section 4.2 deals with the implementation details corresponding
to this design phase.
3.2.3 Interface Construction
The final primary design phase is building the interface. The interface en-
codes a knowledge specific to the possible optimisations that can be per-
formed on the application. This knowledge is obtained from the results
retrieved from the previous design phase. Using the interface we should
be also able to specify at what points in the application we want to per-
form these optimisations. This interface is a domain-specific optimisation
component (DSOC) described in the Section 1.1. The properties of DSOC
are similar to the properties of aspects in the aspect-oriented programming.
Due the time constraints imposed on this project instead of implementing3.3 Design Overview 24 the interface we have decided to use the existing aspect-oriented framework for .NET that supports dynamic weaving since the most of today’s opti- misations are run-time optimisations. Description and usage of the aspect- oriented framework we have chosen for this project is given in the Section 4.3 together with the explanation how we have incorporated results from the previous design phases with the framework. Figure 3.3 shows the process of applying domain-specific optimisation component to the application to produce the optimised version of the application. Figure 3.3: The process of applying optimisation(s) to the application 3.3 Design Overview By implementing each of the primary design phases we will fulfill the require- ments given in the Section 3.1. By integrating individual phases together we get the full picture of the system as shown in Figure 3.4. 3.3.1 The Integrated System From the Figure 3.4 we can see that the domain-specific optimisation com- ponents consist of static pointcuts, dynamic pointcuts and an advice. We use static pointcuts of DSOC to pass additional information required by the static analysis and the builder phase of the deferred data flow analysis. The
3.4 Summary 25
purpose of dynamic pointcuts is to use results from the data-flow analysis.
Based on the results from the data-flow analysis we specify the connection
points in the application, using dynamic pointcuts, where we want to in-
tercept the control flow of the application. At those points we will execute
the advice. The advice encodes a knowledge specific to the application (e.g.
data-flow information) and a knowledge how to perform the optimisation.
Figure 3.4: Design overview
3.4 Summary
This chapter,
• gives the requirement specification of this project.
• describes how the specification has been broken into individual design
phases.
• points out what requirements are met by each design phase.
• presents the integration of these phases into a single system.Chapter 4
Implementation
In this chapter we explain the implementation of design described in the
previous chapter. The implementation serves as the proof of concept of
ideas stated in the introduction chapter and it was done in C# programming
language. Although we do include some code listings throughout the report,
the full implementation was too large to include.
The chapter starts with a brief introduction to the library used to retrieve
Common Intermediate Language (CIL) instructions from assemblies and
we give a description of each aspect of the library required to implement
deferred data-flow analysis. From now on, by instruction we refer to CIL
instruction. Then we describe in detail the implementation of deferred data-
flow analysis together with the API used to obtain results produced by the
analysis. Finally, we introduce the aspect-oriented framework used to apply
the domain-specific optimisations based on the results from the deferred
data-flow analysis.
4.1 Assembly analysis
In this section we give a brief introduction to the library used to retrieve in-
structions from assemblies. Then we explain how to obtain the instructions
from the assemblies using the library and the structure of classes used to
represent those instructions. In order to simplify the deferred data-flow anal-
ysis we show how to group the instructions into the instruction blocks. We
will demonstrate how to use those instruction blocks to do the control-flow
analysis. At the end of this section we will have enough tools to implement
the deferred data-flow analysis.
4.1.1 The Adon library
The Adon library was implemented by Kwok Cheung Yeung at the Imperial
College London. It was designed as a part of a project to fully port Veneer4.1 Assembly analysis 27
from the Java world to .NET world. Due the lack of good open source
tools for analysing assemblies Yeung decided to implement his own version.
During the work on this project we were able to obtain a working version
of this library, although the library is still not freely available. Since no
documentation for the Adon library was available at the time of writing this
report, we have decided to describe parts of the library that was of use in
this project.
The library makes a heavy use of reflection classes from the .NET frame-
work, namely System.Reflection and System.Reflection.Emit. To load
an assembly in order to be able to operate on it, a CodeDatabase class needs
to be used from the Adon library. A static method GetAssembly() from
the CodeDatabase class is used to load the assembly whose name is passed
as the argument. After the assembly has been loaded, we can use a method
GetMethod() to obtain properties of a specific method (e.g. return type)
together with method’s instructions. Since a user decides which methods
are candidates for the optimisation, we will only obtain properties of the
methods specified by the user. In the next two subsections we elaborate on
the classes used to represent methods and instructions.
Structures
The main class in Adon is an abstract class AnnotatedBase and all other
classes extend this class. The purpose of this class is to manually add ad-
ditional information to methods and instructions. For example, using this
class we are able to add to the instruction a list of variables that the instruc-
tion defines. The methods are represented by an abstract ILMethodBase.
Figure 4.1: Classes used to represent methods from assembly
This class extend the abstract class ILMember that in turn extends the ab-
stract class AnnotatedBase. We can have two different types of methods.
These types are constructor, represented by the ILConstructor and a regu-
lar method, represented by the ILMethod class. Both of those classes extend4.1 Assembly analysis 28
the abstract class ILMethodBase. The class diagram for classes described
above is given in Figure 4.1.
Because we are only going to optimise methods that are specified by the
user the class of our main interest is ILMethod class. From the Figure 4.1 we
note that we are able to obtain the list of method’s instruction, because the
list of method’s instruction is stored in the class ILMethodBase that class
ILMethod extend. The instruction list of a method is stored in the class
InstructionList that is improved implementation of ArrayList. There-
fore to access individual instructions of a method we can use the standard
operations on the array.
Instructions
All representations of instructions in the Adon library extend the base ab-
stract class InstructionBase. The InstructionBase class extends the
AnnotatedBase and ICloneable classes. Therefore it is possible to manually
add additional information to each instruction. The information that we are
planning to add to each instruction are results from the data-flow analysis.
Also, in the Adon library, there exists a class CompoundInstructions that
extends the InstructionBase class and is used to group the instructions.
In implementing our instruction blocks we will be extending this class. Since
the CompoundInstruction indirectly extends the AnnotatedBase class we
can also manually add aditional information to the instruction blocks.
The power of Adon lies in the fact that each Common Intermediate
Language instruction is represented by a class. For example, unconditional
branch instruction br is represented by a class Br. Thus we can check for
the instructions in the instruction list simply by testing if the instruction is
an instance of a class of instruction that we are looking for.
4.1.2 Instruction blocks
In the previous section we have introduced the Adon library and explained
the structure of the classes that were used throughout the implementation
of this project. In this section we will show how to use these classes to create
the instruction blocks.
The virtual execution system of the .NET framework is a simple stack-
based machine that consists of an instruction pointer, a stack pointer, an
array of arguments and an array of locals. This virtual machine differs from
the other virtual machines, because most of the other virtual machines put
arguments and locals in the same array. Since the virtual machine for the
.NET framework is stack-based then a single statement from a high-level
programming language will be represented by several instructions in the
Intermediate Language. For example, the following simple statement from
any high-level language,You can also read