Dynamical machine learning volumetric reconstruction of objects' interiors from limited angular views
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Kang et al. Light: Science & Applications (2021)10:74 Official journal of the CIOMP 2047-7538
https://doi.org/10.1038/s41377-021-00512-x www.nature.com/lsa
ARTICLE Open Access
Dynamical machine learning volumetric
reconstruction of objects’ interiors from limited
angular views
1
Iksung Kang , Alexandre Goy2,4 and George Barbastathis2,3
Abstract
Limited-angle tomography of an interior volume is a challenging, highly ill-posed problem with practical implications
in medical and biological imaging, manufacturing, automation, and environmental and food security. Regularizing
priors are necessary to reduce artifacts by improving the condition of such problems. Recently, it was shown that one
effective way to learn the priors for strongly scattering yet highly structured 3D objects, e.g. layered and Manhattan, is
by a static neural network [Goy et al. Proc. Natl. Acad. Sci. 116, 19848–19856 (2019)]. Here, we present a radically
different approach where the collection of raw images from multiple angles is viewed analogously to a dynamical
system driven by the object-dependent forward scattering operator. The sequence index in the angle of illumination
plays the role of discrete time in the dynamical system analogy. Thus, the imaging problem turns into a problem of
nonlinear system identification, which also suggests dynamical learning as a better fit to regularize the reconstructions.
We devised a Recurrent Neural Network (RNN) architecture with a novel Separable-Convolution Gated Recurrent
Unit (SC-GRU) as the fundamental building block. Through a comprehensive comparison of several quantitative
1234567890():,;
1234567890():,;
1234567890():,;
1234567890():,;
metrics, we show that the dynamic method is suitable for a generic interior-volumetric reconstruction under a limited-
angle scheme. We show that this approach accurately reconstructs volume interiors under two conditions: weak
scattering, when the Radon transform approximation is applicable and the forward operator well defined; and strong
scattering, which is nonlinear with respect to the 3D refractive index distribution and includes uncertainty in the
forward operator.
Introduction forward model, i.e. the projection or Radon transform
Optical tomography reconstructs the three-dimensional approximation applies. This is often the case with hard
(3D) internal refractive index profile by illuminating the x-rays through most materials including biological tissue;
sample at several angles and processing the respective raw for that reason, Radon transform inversion has been
intensity images. The reconstruction scheme depends widely studied1–10. The problem becomes even more
on the scattering model that is appropriate for a given acute when the range of accessible angles around the
situation. If the rays through the sample can be well object is restricted, a situation that we refer to as “limited-
approximated as straight lines, then the accumulation of angle tomography,” due to the missing cone problem11–13.
absorption and phase delay along the rays is an adequate The next level of complexity arises when diffraction and
multiple scattering must be taken into account in the
forward model; then, the Born or Rytov expansions and
Correspondence: Iksung Kang (iskang@mit.edu) the Lippmann-Schwinger integral equation14–18 are more
1
Department of Electrical Engineering and Computer Science, Massachusetts appropriate. These follow from the scalar Helmholtz
Institute of Technology, 77 Massachusetts Ave, Cambridge, MA, USA
2 equation using different forms of expansion for the scat-
Department of Mechanical Engineering, Massachusetts Institute of
Technology, Cambridge, MA 02139, USA tered field19. In all these approaches, weak scattering is
Full list of author information is available at the end of the article
© The Author(s) 2021, corrected publication 2021
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction
in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if
changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If
material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain
permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.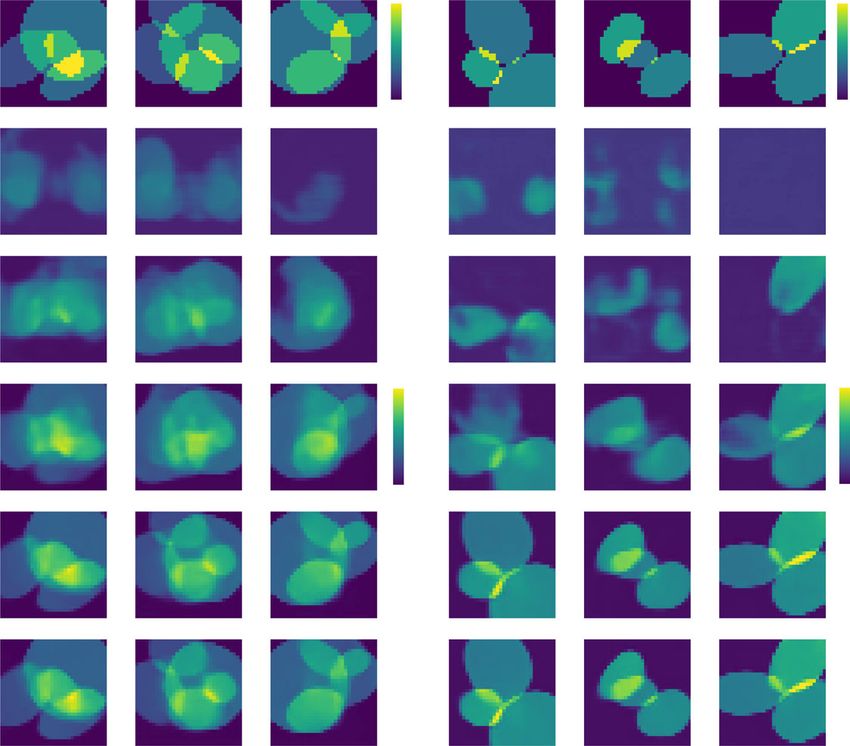
Kang et al. Light: Science & Applications (2021)10:74 Page 2 of 21 obtained from the first order in the series expansion. being considered and (2) the relationship of these priors to Holographic approaches to volumetric reconstruction the forward operator (Born, BPM, etc.) so as to produce a generally rely on this first expansion term20–31. Often, reasonable estimate of the inverse. solving the Lippmann-Schwinger equation is the most Here we propose a rather distinct approach to exploit robust approach to account for multiple scattering, but machine learning for a generic 3D refractive index even then, the solution is iterative and requires excessive reconstruction independent of the type of scattering. Our amount of computation especially for complex 3D geo- motivation is that, as the angle of illumination is changed, metries. The inversion of these forward models to obtain the light goes through the same scattering volume, but the refractive index in 3D is referred to as inverse scat- the scattering events, weak or strong, follow a different tering, also a well-studied topic32–39. sequence. At the same time, the raw image obtained An alternative to the integral methods is the Beam from a new angle of illumination adds information to the Propagation Method (BPM), which sections the sample tomographic problem, but that information is constrained along the propagation distance z into slices, each slice by (i.e. is not orthogonal to) the previously obtained scattering according to the thin transparency model, patterns. We interpret this as similar to a dynamical and propagates the field from one slice to the next system, where the output is constrained by the history of through the object40. Despite some compromise in earlier inputs as time evolves and new inputs arrive. (The accuracy, BPM offers comparatively light load of com- convolution integral is the simplest and best-known putation and has been used as forward model for 3D expression of this relationship between the output of a reconstructions18. The analogy of the BPM computa- system and the history of the system’s input.) An alter- tional structure with a neural network was exploited, in native interpretation is as dynamic programming51, where conjunction with gradient descent optimization, to the system at each step reacts so as to incrementally obtain the 3D refractive index as the “weights” of the improve an optimality criterion—in our case, the recon- analogous neural network in the learning tomography struction error metric. approach41–43. BPM has also been used with more tra- The analogy between tomography and a dynamical ditional sparsity-based inverse methods33,44. Later, a system suggests the RNN architecture as a strong candi- machine learning approach with a Convolutional Neural date to process raw images in sequence, as they are Network (CNN) replacing the iterative gradient descent obtained one after the other; and process them recur- algorithm exhibited even better robustness to strong rently so that each raw image from a new angle improves scattering for layered objects, which match well with the over the reconstructions obtained from the previous BPM assumptions45. Despite great progress reported by angles. Thus, we treat multiple raw images under different these prior works, the problem of reconstruction illumination angles as a temporal sequence, as shown in through multiple scattering remains difficult due to the Fig. 1. The angle index replaces what is a dynamical sys- extreme ill-posedness and uncertainty in the forward tem would have been the time t. This idea is intuitively operator; residual distortion and artifacts are not appealing; it also leads to considerable improvement in uncommon in experimental reconstructions. the reconstructions, removing certain artifacts that were Inverse scattering, as inverse problems in general, may visible in the strong scattering case of ref. 45. be approached in a number of different ways to regularize The dynamic reconstruction methodology applies, for the ill-posedness and thus provide some immunity to example, too weak scattering where the raw images are noise46,47. Recently, thanks to a ground-breaking obser- the sinograms; and too strong scattering, where the raw vation from 2010 that sparsity can be learnt by a deep images are better interpreted as intensity diffraction pat- neural network48, the idea of using machine learning to terns. The purpose of the learning scheme is to augment approximate solutions to inverse problems also caught on this relationship with regularization priors applicable to a ref. 49. In the context of tomography, in particular, deep certain class of objects of interest. neural networks have been used to invert the Radon The way we propose to use RNNs in this problem is transform50 and recursive Born model32, and were also the quite distinct from the recurrent architecture proposed basis of some of the papers we cited earlier on holographic first in ref. 48 and subsequently implemented, replacing 3D reconstruction28–30, learning tomography41–43, and the recurrence by a cascade of distinct neural networks, in multi-layered strongly scattering objects45. In prior work refs. 50,52,53, among others. In these prior works, the input on tomography using machine learning, generally, the to the recurrence can be thought of as clamped to the raw intensity projections are all fed simultaneously as inputs to measurement, as in the proximal gradient54 and related a computational architecture that includes a neural net- methods; whereas, in our case, the input to the recurrence work, and the output is the 3D reconstruction of the is itself dynamic, with the raw images from different refractive index. The role of the neural network is to learn angles forming the input sequence. Moreover, by utilizing (1) the priors that apply to the particular class of objects a modified gated recurrent unit (more on this below)
Kang et al. Light: Science & Applications (2021)10:74 Page 3 of 21
N
g1
g le
An
HN
Angle n
Rotation of gn
Hn Angular axis
illumination
H1
1
gle
f gN
An
Fig. 1 Definition of the angular axis according to illumination angles. Each angle of illumination, here labeled as angular axis, corresponds to a
time step in an analogous temporal axis
rather than a standard neural network, we do not need to used Radon transform assumption, i.e. weak scattering.
break the recurrence up into a cascade. Then, we demonstrate the applicability of the dynamical
Typical applications of RNNs55,56 are in temporal approach to strong scattering tomography. We show
sequence learning and identification. In imaging and significant improvement over static neural network-based
computer vision, RNN is applied in 2D and 3D: video reconstructions of the same experimental data under the
frame prediction57–60, depth map prediction61, shape strong scattering assumption. The improvement is shown
inpainting62; and stereo reconstruction63,64 or segmenta- both visually and in terms of several quantitative metrics.
tion65,66 from multi-view images, respectively. Stereo, in Results from an ablation study indicate the relative sig-
particular, bears certain similarities to our tomographic nificance of the new components we introduced to the
problem here, as sequential multiple views can be treated quality of the reconstructions.
as a temporal sequence. To establish the surface shape,
the RNNs in these prior works learn to enforce con- Results
sistency in the raw 2D images from each view and resolve Our first investigation of the recurrent reconstruction
the redundancy between adjacent views in recursive scheme is for weak scattering, i.e. when the Radon trans-
fashion through the time sequence (i.e. the sequence of form approximation applies and with a limited range of
view angles). Non-RNN learning approaches have also available angles. For simulation, each sample consists of
been used in stereo, e.g. Gaussian mixture models67. In random number, between 1 and 5 with equal probability, of
computed tomography, in particular, an alternate dyna- ellipsoids at random locations with arbitrarily chosen sizes,
mical neural network of the Hopfield type has been used amplitudes, and angles, thus spatially isotropic in average.
successfully68. Rotation is applied along the x-axis, from −10° to +10° with
In this work, we replaced the standard Long Short- 1° increment, thus 21 projections per sample under a
Term Memory (LSTM)56 implementation of RNNs with a parallel-beam geometry. The Filtered Backprojection (FBP)
modified version of the newer Gated Recurrent Unit algorithm3 is used to generate crude estimates from the
(GRU)69. The GRU has the advantage of fewer parameters projections. nth FBP Approximant (n = 1,2,…,21) is the
but generalizes comparably with the LSTM. Our GRU reconstruction by the FBP algorithm using n projections of
employs a separable-convolution scheme to explicitly n angles starting from −10°.
account for the asymmetry between the lateral and axial The reconstructions by the RNN are compared in Fig. 2
axes of propagation. We also utilize an angular attention with FBP and Total Variation (TV)-regularized recon-
mechanism whose purpose is to learn how to reward structions using TwIST71 for qualitative and visual com-
specific angles in proportion to their contribution to parison. Here a TV-regularization parameter is set to be
reconstruction quality70. We found that for the strongly 0.01, and the algorithm is run up to 200 iterations until its
anisotropic samples or scanning schemes the angular objective function saturates. Figure 3 shows the quanti-
attention mechanism is effective. tative comparison on test performance using three dif-
The results of our simulation and experimental study on ferent quantitative metrics, where FBP and FBP + TV
a generic interior volumetric reconstruction are in yielded much lower values than the recurrent scheme.
Results. We first show numerically that the dynamical Figure 4 shows the evolution of test reconstructions as new
machine learning approach is suitable to tomographic projections or FBP Approximants are presented to the
reconstruction under more restrictive and commonly dynamical scheme. When the recurrence starts with n = 1,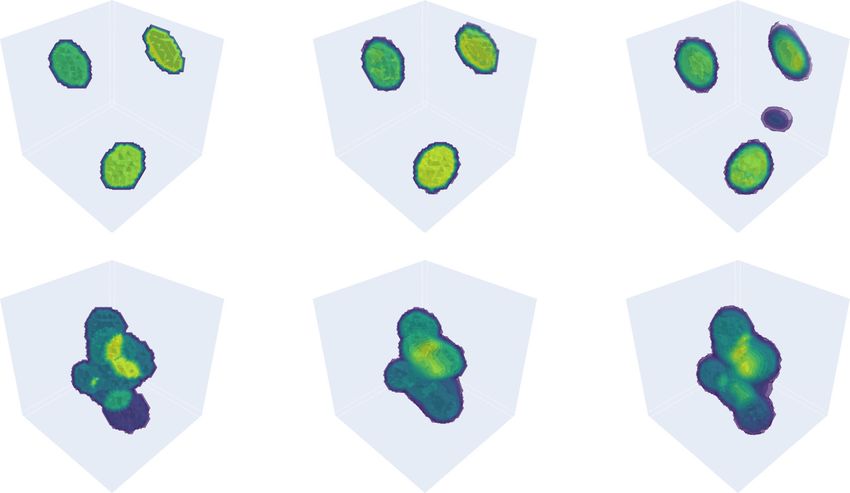
Kang et al. Light: Science & Applications (2021)10:74 Page 4 of 21
Sample 1 Sample 2
xz yz xy xz yz xy
2.72 1.62
Ground truth
Amplitude
Amplitude
0 0
0.876 0.432
Amplitude
Amplitude
FBP
–1.29 –0.893
0.921 0.514
FBP + TV
Amplitude
Amplitude
–1.32 –0.994
2.54 1.60
Proposed RNN
Amplitude
Amplitude
–0.027 –0.065
G.T. G.T.
FBP FBP
FBP + TV FBP + TV
RNN RNN
Fig. 2 Dynamic approach for projection tomography (i.e. subject to the Radon transform approximation) using simulated data. Each
simulated sample contains randomly generated ellipsoids. Shown are xz, yz, and xy cross-sections of ground truth and reconstructions by Filtered
Backprojection (FBP), TV-regularized Filtered Backprojection (FBP + TV), and the proposed RNN. Red dashed lines show where the 1D cross-section
profiles are drawn
1.0 1.0 30
Proposed RNN Proposed RNN
FBP + TV FBP + TV
FBP FBP
0.9 25
0.8
Wasserstein distance (x 0.01) ( )
0.8 20
0.6
)
)
SSIM (
PCC (
0.7 15
0.4
0.6 10
0.2
0.5 5
Proposed RNN
FBP + TV
FBP
0.4 0.0 0
Fig. 3 Test performance under the weak scattering condition. The figure quantitatively compares the recurrent scheme with FBP + TV, and FBP.
The graphs show the means and 95% confidence intervals
the volumetric reconstruction is quite poor; as more projec- Details of the recurrent architecture for the weak
tions are included, the reconstruction improves as expected. It scattering assumption are presented in Fig. 16b. To
is also interesting to see that not all the angles are needed to quantify the relative contributions to reconstruction
achieve reasonable quality of reconstructions as the graphs quality of each element in the architecture, the elements
and reconstructions in Fig. 4a, b saturate around n = 19. one by one are ablated (-) or substituted ($) with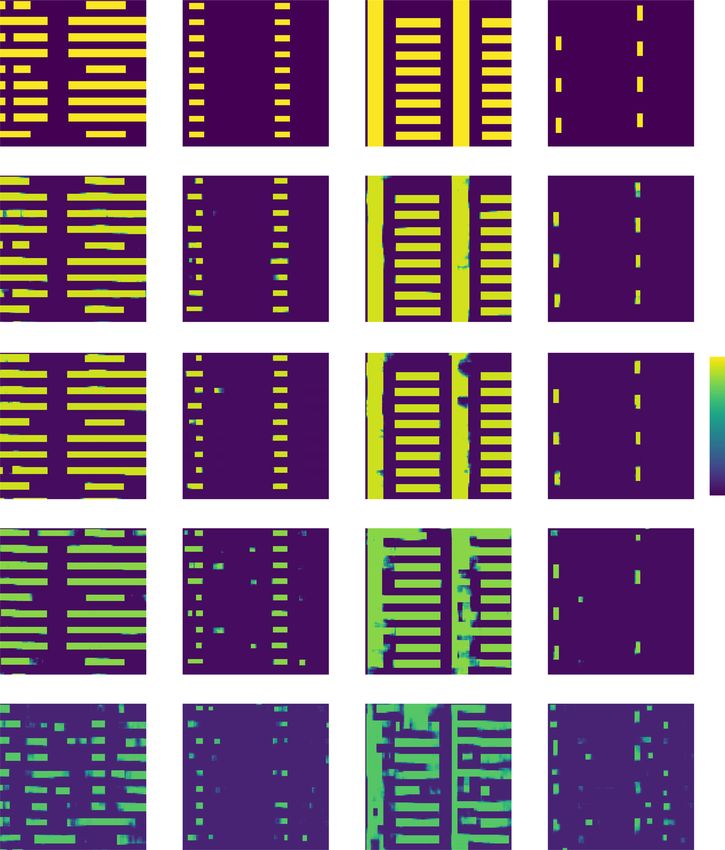
Kang et al. Light: Science & Applications (2021)10:74 Page 5 of 21
a b Sample 1 Sample 2
xz yz xy xz yz xy
0.9 2.72 1.62
Ground truth
0.8
Amplitude
Amplitude
0.7
)
PCC (
0.6 0 0
0.5
0.4
n=1
0.3 PCC
1 5 9 13 17 21
n
0.8
n=7
0.7
0.6
)
0.5
SSIM (
2.54 1.60
0.4 n = 13
Amplitude
Amplitude
0.3
0.2
–0.065
0.1 SSIM
–0.027
1 5 9 13 17 21
n
n = 19
Wasserstein distance (× 0.01)
Wasserstein distance (× 0.01) ( )
25
20
n = 21
15
10
G.T. G.T.
n=1 n=1
n=7 n=7
5 n = 13 n = 13
n = 19 n = 19
1 5 9 13 17 21 n = 21 n = 21
n
Fig. 4 Progression of 3D reconstruction performance under the weak scattering condition. a Three quantitative metrics are used to quantify
test performance of the trained recurrent neural network under the weak scattering assumption using simulated data, i.e. Pearson Correlation
Coefficient (PCC), Structural Similarity Index Metric (SSIM), and Wasserstein distance. b Progression of 3D reconstruction performance as the FBP
Approximants n ¼ 1; ¼ ; Nð¼ 21Þ are projected to the recurrent scheme. Movies as Supplementary movies 1 and 2 show the progression of the
reconstructions of Samples 1 and 2, respectively. Red dashed lines show where the 1D cross-section profiles are drawn
alternatives. This ablation study is performed on a tomographic reconstructions under the weak scattering
strategy to giving weights on hidden features, separable assumption. However, for the ablation of the angular
convolution, and ReLU (rectified linear unit) activation attention mechanism, it makes no large difference from the
function72 inside the recurrence cell. Specifically, in the performance of the proposed model, which is because
study, (1) an angular attention mechanism is ablated, or the objects used for training and testing are isotropic in
only last hidden feature hn is taken into account before average and do not show any preferential direction.
the decoder instead of the angular attention mechanism; Here, we perform an additional study on the role of the
(2) a separable convolution scheme is ablated, thus the angular attention mechanism by granting a preferential
standard 3D convolution; and (3) ReLU activation direction or spatial anisotropy to the objects of interest. In
function is ablated and then substituted with the tanh this study, the mean major axis of the objects is assumed
activation function, which is more usual69. The ablated to be parallel to the z-axis, i.e. the objects are elongated
architectures are trained under the same training along the axis. Instead of the previously examined sym-
scheme (for more details, see Training the recurrent metric angular scanning range (−10°, +10°), we now
neural network in Materials and methods) and tested consider the asymmetric case (−15°, +5°).
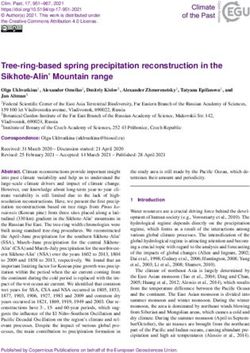
with the same simulated data. In Fig. 7a, the angular attention with the asymmetry now
Visually, in Fig. 5, test performance largely degrades as the gives attention on n differently, i.e. its peak translated to the
ablation happens on the ReLU activation function and left by 5. It is because the projections from higher angles
separable convolution, which is also found quantitatively in may contain more useful information on the objects due to
Fig. 6. Therefore, for the Radon case, we find that (1) ReLU the directional preference of the objects, thus the distribu-
activation function is highly desirable instead of the native tion of the attention probabilities is now attracted to
tanh function; (2) the separable convolution is helpful the lower indices. In Fig. 7b, we quantitatively show that the
when designing a recurrent unit and encoder/decoder for angular attention improves performance in the case of the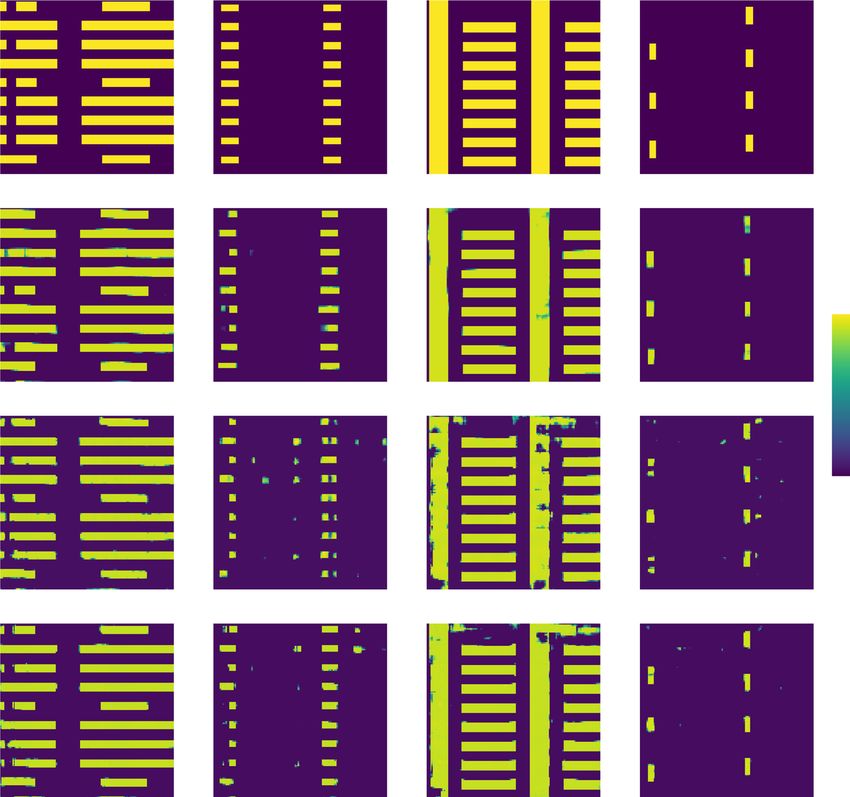
Kang et al. Light: Science & Applications (2021)10:74 Page 6 of 21
Sample 1 Sample 2
xz yz xy xz yz xy
Ground truth
Proposed RNN
2.54 1.69
(–) angular attention
Amplitude
Amplitude
0 0
(–) separable
convolution
( ) tanh
Fig. 5 Ablation study on the recurrent architecture under the weak scattering condition. Qualitative representations are shown when some
elements of the recurrent architecture in Fig. 16b are ablated, and the rows are ordered by increasing severity of the ablation effects according to Fig. 6
0.98 0.90 9
8
0.85
0.96
7
Wasserstein distance (x 0.01) ( )
0.80
6
0.94
0.75
)
)
5
SSIM (
PCC (
0.70 4
0.92
3
0.65
2
0.90 Proposed RNN Proposed RNN Proposed RNN
(–) Angular attention 0.60 (–) Angular attention (–) Angular attention
(–) Separable convolution (–) Separable convolution 1 (–) Separable convolution
( ) tanh ( ) tanh ( ) tanh
0.88 0.55 0
Fig. 6 Quantitative analysis on test performance in the ablation study under the weak scattering condition. The graphs show the means and
95% confidence intervals
asymmetric scanning of objects with directionality regard- and methods” for details). Networks trained with exam-
less of the noise present in projections. ples with small and dense features tend to generalize
Figures 8 and 9 characterize our proposed method in better and with less artifacts than large and sparse fea-
terms of feature size and feature sparsity, as well as cross- tures, in agreement with ref. 73. Lastly, and not surpris-
domain generalization, compared to the baseline model ingly, overall reconstruction quality is better when feature
(see Training the recurrent neural network in “Materials size is large and features are sparse.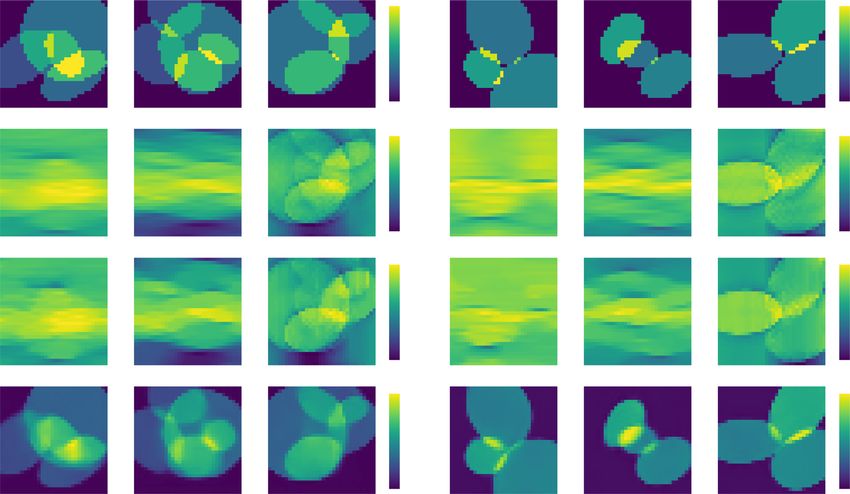
Kang et al. Light: Science & Applications (2021)10:74 Page 7 of 21
a b 0.980 0.97 1.6
0.050
0.975 0.96
0.049 1.4
Wasserstein distance (x 0.01) ( )
Attention probabilities (n)
0.048 0.970 0.95
1.2
SSIM ( )
PCC ( )
0.047 0.965 0.94
1.0
0.046 0.960 0.93
0.045 0.8
0.955 0.92
Scanning range: (–10°, +10°) With attention With attention With attention
0.044 Scanning range: (–15°, +5°) Without attention Without attention Without attention
0.950 0.91 0.6
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Noiseless 100 photons/pixel Noiseless 100 photons/pixel Noiseless 100 photons/pixel Noiseless 100 photons/pixel Noiseless 100 photons/pixel Noiseless 100 photons/pixel
n Scanning range: (–10°, +10°) Scanning range: (–15°, +5°) Scanning range: (–10°, +10°) Scanning range: (–15°, +5°) Scanning range: (–10°, +10°) Scanning range: (–15°, +5°)
Fig. 7 Attention probabilities and angular attention mechanism for different ranges of scanning. a Attention probabilities according to
different ranges of scanning. Here, for the scanning range of (−10°, +10°), n = 1 and 21 correspond to −10° and +10°, respectively; and for the
scanning range of (−15°, +5°), they correspond to −15° and +5°, respectively. b Test performance for our examined scanning ranges with and
without the angular attention mechanism. The graphs show the means and 95% confidence intervals
a 0.98
b c
Baseline (21 M) 0.96 0.96
Proposed RNN (21 M)
0.97
0.94 0.94
0.96 Small 0.9192 ± 0.0069 0.8705 ± 0.0094 Small 0.9368 ± 0.0030 0.9064 ± 0.0058
0.92 0.92
0.95
Trained with
Trained with
)
)
)
0.90 0.90
PCC (
PCC (
PCC (
0.94
0.88 0.88
0.93
0.86 0.86
0.92 Large 0.8218 ± 0.0127 0.9578 ± 0.0023 Large 0.8246 ± 0.0099 0.9632 ± 0.0016
0.84 0.84
0.91
0.82 0.82
0.90
Small Large Small Large Small Large
Tested with Tested with
d Tested with
Ground truth Small Large
Small
z z z
Trained with
y x y x y x
Large
z z z
y x y x y x
Fig. 8 Sample feature size and testing performance. a Quantitative comparison of testing performance in terms of feature size, and cross-domain
generalization result of (b) the baseline model (21 M) and (c) the proposed RNN (21 M). d Qualitative comparison of a volumetric reconstruction for
different cases of training and testing conditions in terms of feature size (see Table S1 in Supplementary Information (SI) Section S1 for more details)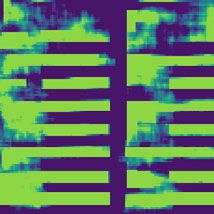
Kang et al. Light: Science & Applications (2021)10:74 Page 8 of 21
a 0.96
b c
Baseline (21 M)
Proposed RNN (21 M)
0.92 0.92
0.94
Sparse 0.9203 ± 0.0089 0.8190 ± 0.0102 Sparse 0.9329 ± 0.0053 0.8557 ± 0.0052
0.90 0.90
0.92
Trained with
Trained with
)
)
)
0.88 0.88
PCC (
PCC (
PCC (
0.90
0.86 0.86
Dense 0.8576 ± 0.0157 0.8871 ± 0.0067 Dense 0.9017 ± 0.0062 0.9161 ± 0.0031
0.84 0.84
0.88
0.82 0.82
0.86
Sparse Dense Sparse Dense
Sparse Dense
Tested with Tested with
d Tested with
Ground truth Sparse Dense
Sparse
z z z
Trained with
y x y x y x
Dense
z z z
y x y x y x
Fig. 9 Sample sparsity and testing performance. a Quantitative comparison of testing performance in terms of sparsity, and cross-domain
generalization result of (b) the baseline model (21 M) and (c) the proposed RNN (21 M). d Qualitative comparison of a volumetric reconstruction for
different cases of training and testing conditions in terms of sparsity. For more details, see Table S1 in SI Section S1
Next, we investigate the case when the Radon transform more details in the DWMA process. The evolution of the
is not applicable, i.e. tomography under strong scattering RNN output as more DWMA Approximants are pre-
conditions and under a similarly limited-angle scheme. sented is shown in Fig. 10 and shows a similar improve-
The RNN is first trained with the single-pass, gradient ment with recurrence m as in the Radon case of Fig. 4.
descent-based Approximants Eq. (4) of simulated dif- Also, like the Radon case, it is interesting to see that not
fraction patterns (see Training and testing procedures in all the Approximants are needed to acquire reasonable
Materials and methods), and then tested with the simu- quality of reconstructions: the graphs in Fig. 10a saturate
lated ones and additionally with the TV-based Approx- around m = 10 and the visual quality of the reconstruc-
imants Eq. (5) of experimentally obtained diffraction tions at m = 10–12 in Fig. 10b does not largely differ.
patterns. TV regularization is only applied to the For comparison, the 3D-DenseNet architecture with skip
experimental patterns. To reconcile any experimental connections in ref. 45 and its modified version with more
artifacts, there is an additional step of Dynamic Weighted parameters to match with that of our RNN are set as
Moving Average (DWMA) on the Approximants baseline models (see Training the recurrent neural network
f n½1 ðn ¼ 1; 2; ¼ ; 42Þ, hence DWMA Approximants in Materials and methods for details). Our RNN has
½1
approximately 21 M parameters, and visual comparisons
f~m ðm ¼ 1; 2; ¼ ; 12Þ. See “Materials and methods” for with the baseline 3D-DenseNets with 0.5 M and 21 M
Kang et al. Light: Science & Applications (2021)10:74 Page 9 of 21
a b Layer 1 Layer 2 Layer 3 Layer 4
1.0
5.24
Ground truth
0.9
Δn (x 10-2)
0.8
PCC ( )
2.62
0.7
0.6
0.5 0
PCC (Simulation)
0.4 PCC (Experiment)
1 2 3 4 5 6 7 8 9 10 11 12
m
m=1
1.0
0.9
0.8
SSIM ( )
0.7
0.6
0.5
0.4 SSIM (Simulation)
SSIM (Experiment)
0.3 m=5
1 2 3 4 5 6 7 8 9 10 11 12
m
5.06
Wasserstein distance (x 0.01) ( )
Wasserstein distance (x 0.01) (Simulation)
10 Wasserstein distance (x 0.01) (Experiment)
Δn (x 10-2)
8
2.53
6
4
0
m = 10
2
0
1 2 3 4 5 6 7 8 9 10 11 12
m
14 Probability of error (%) (Simulation)
Probability of error (%) (Experiment)
Probability of error (%) ( )
12
10
8
m = 12
6
4
2
0
1 2 3 4 5 6 7 8 9 10 11 12
m
Fig. 10 Progress of 3D reconstruction performance as diffraction patterns from different angles are presented to the recurrent scheme.
½1
Here, DWMA Approximants ~f m ðm ¼ 1; 2; ¼ ; 12Þ are presented to the RNN sequentially. a Four quantitative metrics (PCC, SSIM, Wasserstein
distance, and Probability of Error; PE) quantitatively show the progress using both simulated and the experimental data. The graphs show the mean
of the metrics of Layers 1–4. b Qualitative comparison using experimental data with different m = 1, 5, 10, and 12
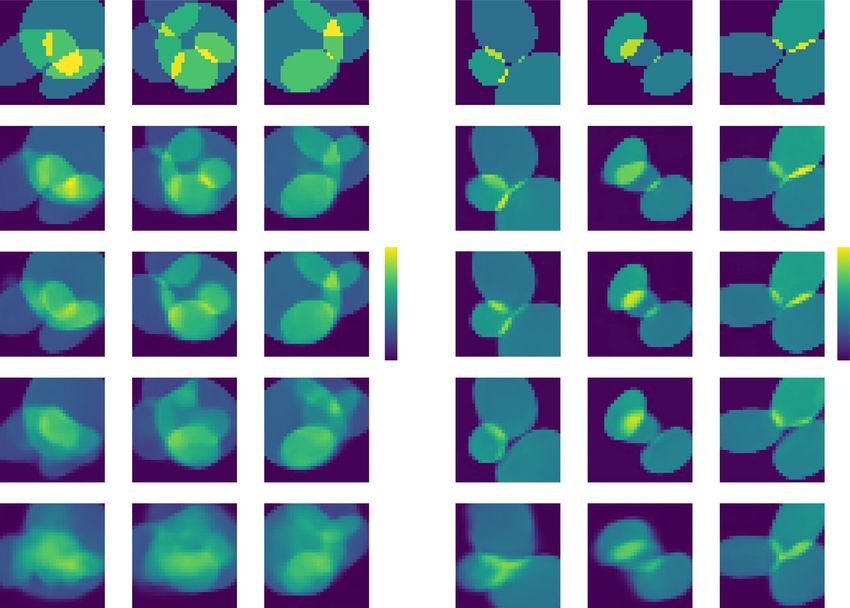
parameters are shown in Fig. 11. The RNN results show Visually in Fig. 13, unlike the Radon case, paying
substantial visual improvement, with fewer artifacts and attention only to the last hidden feature affects and
distortions compared to the static approaches of ref. 45, even degrades the testing performance worst. Also, it is
when the number of parameters in the latter matches ours. important to note that the ablation of the separable
PCC, SSIM, Wasserstein distance, and PE are used to convolution scheme brings degradation in test perfor-
quantify test performance using simulated and experimental mance according to Fig. 13. The decrease in test perfor-
data in Fig. 12. mance by the substitution of ReLU with the more
We also conducted an ablation study of the learning common tanh is comparatively marginal. These findings
architecture of Fig. 16d. Similar to the Radon case, each are supported quantitatively as well in Fig. 14.
component in the architecture was ablated or substituted Thus, under the strong scattering condition, we find that
with its alternative, one at a time: (1) ReLU was ablated (1) hidden features from all angular steps need to be taken
and then substituted with the native tanh activation into consideration with the angular attention mechanism for
function, (2) the separable convolution was ablated, thus reconstructions to get a better test performance although
the standard 3D convolution, and (3) the angular atten- the last hidden feature is assumed to be informed of the
tion mechanism was ablated, or only the last hidden history of the previous angular steps; (2) replacing the
feature was given attention. The ablated architectures are standard 3D convolution with the separable convolution
also trained under the same training scheme (see Training helps when designing a recurrent unit and a convolutional
the recurrent neural network in “Materials and methods” encoder/decoder for tomographic reconstructions; and (3)
for more details) and tested with both the simulated the substitution of tanh with ReLU is still useful but may be
Eq. (4) and experimental Approximants Eq. (5). application dependent.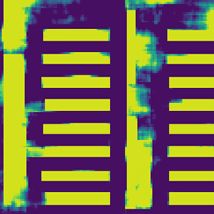
Kang et al. Light: Science & Applications (2021)10:74 Page 10 of 21
Layer 1 Layer 2 Layer 3 Layer 4
Ground truth
Proposed RNN (21 M)
5.24
Δn (× 10–2)
Baseline (0.5 M)
0
Baseline (21 M)
Fig. 11 Qualitative comparison on test performance between the baseline and proposed architectures using experimental data. The
baseline architectures are 3D-DenseNet CNN architectures with 0.5 M and 21 M parameters. Our proposed architecture is a recurrent neural network
with elements (for more details, see Computational architecture in Materials and methods)
a 1.000 1.000
0.6 Proposed RNN Proposed RNN
0.40
0.998 Baseline (0.5 M) Baseline (0.5 M)
0.998
Wasserstein distance (x 0.01) ( )
Baseline (21 M) 0.35 Baseline (21 M)
0.5
Probability of error (%) ( )
0.996
0.996 0.30
0.994 0.4
SSIM ( )
PCC ( )
0.25
0.994
0.992 0.3 0.20
0.990 0.992 0.15
0.2
0.10
0.988 Proposed RNN Proposed RNN
0.990 0.1
Baseline (0.5 M) Baseline (0.5 M) 0.05
0.986 Baseline (21 M) Baseline (21 M)
0.988 0.0 0.00
Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall
b 1.0 0.9
3.0 7
0.9 0.8
Wasserstein distance (x 0.01) ( )
2.5 6
Probability of error (%) ( )
0.8
0.7 5
2.0
SSIM ( )
0.7
PCC ( )
4
0.6
1.5
0.6
3
0.5 1.0
0.5 2
Proposed RNN Proposed RNN Proposed RNN Proposed RNN
0.4 0.4 0.5
Baseline (0.5 M) Baseline (0.5 M) Baseline (0.5 M) 1 Baseline (0.5 M)
Baseline (21 M) Baseline (21 M) Baseline (21 M) Baseline (21 M)
0.3 0.3 0.0 0
Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall
Fig. 12 Test performance on simulated and experimental data under the strong scattering condition. For the quantitative comparison, four
different metrics are used, i.e. PCC, SSIM, Wasserstein distance, and PE on (a) simulated and (b) experimental data. Graphs in (a) show the means and
95% confidence intervals. Raw data of Fig. 12b can be found in Table S2 in SI Section S2Kang et al. Light: Science & Applications (2021)10:74 Page 11 of 21
Layer 1 Layer 2 Layer 3 Layer 4
Ground truth
Proposed RNN
5.24
( ) tanh
Δn (x 10-2)
0
(–) separable
convolution
(–) angular attention
Fig. 13 Visual quality assessment from the ablation study on elements (see “Computational architecture in Materials and methods” for
details) using experimental data. Rows 3–5 show reconstructions based on experimental data for each layer upon the ablation and substitution of
ReLU activation in Eq. (10) with the more common tanh activation function instead (row 3); ablating the separable convolution scheme, thus the
standard 3D convolution (row 4); ablating the angular attention mechanism and putting attention to only last hidden feature (row 5). The rows are
ordered by increasing severity of the ablation effect according to Fig. 14b
Discussion the reconstructions. We found that the angular attention
We have proposed a new recurrent neural network scheme mechanism takes an important role especially when the
for a generic interior-volumetric reconstruction by processing objects of interest are spatially anisotropic and performs
raw inputs from different angles of illumination dynamically, better than placing all the attention on only the last hid-
i.e. as a sequence, with each new angle improving the 3D den feature. Even though the last hidden feature is a
reconstruction. We found this approach to work well under nonlinear multivariate function of all the previous hidden
two types of scattering assumptions: weak (Radon transform) features, as it has a propensity to reward the latter
and strong. In the second case, in particular, we observed representations but the former ones74, the last hidden
significant qualitative and quantitative improvement over the feature may not sufficiently represent all angular views.
static machine learning scheme of ref. 45, where the raw inputs Hence, the angular attention mechanism adaptively
from all angles are processed at once by a neural network. merges information from all angles. This is particularly
Through the ablation studies, we found that sand- important for our strong scattering case as each DWMA
wiching the recurrent structure with some key elements Approximant involves a diffraction pattern of a certain
between a convolutional encoder/decoder helps improve illumination angle; whereas an FBP Approximant underKang et al. Light: Science & Applications (2021)10:74 Page 12 of 21
a 1.000 1.0000
Proposed RNN Proposed RNN
0.5 ( ) tanh 0.5 ( ) tanh
0.9975 (–) Separable convolution (–) Separable convolution
0.995
(–) Angular attention (–) Angular attention
0.9950
0.4 0.4
Wasserstein distance (x 0.01) ( )
0.990
Probability of error (%) ( )
0.9925
0.985
SSIM ( )
PCC ( )
0.3 0.3
0.9900
0.980
0.9875 0.2 0.2
0.975
0.9850
Proposed RNN Proposed RNN 0.1 0.1
0.970 ( ) tanh ( ) tanh
0.9825
(–) Separable convolution (–) Separable convolution
(–) Angular attention (–) Angular attention
0.965 0.9800 0.0 0.0
Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall
b 1.0 1.2
Proposed RNN 8
Proposed RNN
30
Proposed RNN
( ) tanh ( ) tanh ( ) tanh
(–) Separable convolution (–) Separable convolution (–) Separable convolution
1.0 7 (–) Angular attention 25
0.8 (–) Angular attention (–) Angular attention
Wasserstein distance (x 0.01) ( )
6
Probability of error (%) ( )
0.8 20
0.6 5
SSIM ( )
PCC ( )
0.6 15
4
0.4
3
0.4 10
2
0.2 Proposed RNN
0.2 5
( ) tanh
1
(–) Separable convolution
(–) Angular attention
0.0 0.0 0 0
Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall Layer 1 Layer 2 Layer 3 Layer 4 Overall
Fig. 14 Ablation study on the recurrent architecture under the strong scattering condition. Quantitative assessment from the ablation study
using four different metrics on (a) simulated and (b) experimental data. Graphs in (a) show the means and 95% confidence intervals. Raw data of
Fig. 14b can be found in Table S3 in SI Section S2
the weak scattering case is computed from several pro- strong enough for the captured intensities to be comfor-
jections in a cumulative fashion. tably outside the shot-noise limited regime.
In addition, interestingly, the relative contributions of other Each layer of the sample was made of fused silica slabs
elements, e.g. the separable convolution scheme and ReLU (n = 1.457 at 632.8 nm and at 20 °C). Slab thickness was
activation, differ in weak and strong scattering assumptions. 0.5 mm, and patterns were carefully etched to the depth of
The substitution of the ReLU with a more common tanh 575 ± 5 nm on the top surface of each of the four slabs. To
activation brings forth more severe degradation of perfor- reduce the difference between refractive indices, gaps
mance under the weak scattering assumption. Thus, we between adjacent layers were filled with oil (n = 1.4005 ±
suggested different guidelines for each scattering assumption. 0.0002 at 632.8 nm and at 20 °C), yielding binary-phase
Lastly, alternative implementations of the RNN could be depth of −0.323 ± 0.006 rad. The diffraction patterns used
considered. Examples are LSTMs, Reservoir Comput- for training were prepared with simulation precisely mat-
ing75–77, separable convolution or DenseNet variants for ched to the apparatus of Fig. 15. For testing, we used a set of
the encoder/decoder and dynamical units. We leave these diffraction patterns that was acquired both through simula-
investigations to future work. tion (see Approximant computations in Materials and
methods for details) and experiment.
Materials and methods For the strong scattering case, objects used for both
Experiment simulation and experiment are dense-layered, transparent, i.e.
For the experimental study under the strong scattering of negligible amplitude modulation, and of binary refractive
assumption, the experimental data are the same as in index. They were drawn from a database of IC layout seg-
ref. 45, whose experimental apparatus is summarized in ments45. The feature depth of 575 ± 5 nm and refractive
Fig. 15. We repeat the description here for the readers’ index contrast 0.0565 ± 0.0002 at 632.8 nm and at 20 °C were
convenience. The He-Ne laser (Thorlabs HNL210L, such that weak scattering assumptions are invalid and strong
power: 20 mW, λ = 632.8 nm) illuminated the sample scattering has to be necessarily taken into account. The
after spatial filtering and beam expansion. The illumina- Fresnel number ranged from 0.7 to 5.5 for the given defocus
tion beam was then de-magnified by the telescope amount Δz = 58.2 mm for the range of object feature sizes.
(fL3 : fL4 ¼ 2 : 1), and the EM-CCD (Rolera EM-C2, pixel To implement the raw image acquisition scheme, the
pitch: 8 μm, acquisition window dimension: 1002 ´ 1004) sample was rotated from −10° to +10° with a 1° increment
captured the experimental intensity diffraction patterns. along both the x and y axes, while the illumination beam and
The integration time for each frame was 2 ms, and the EM detector remained still. This resulted in N = 42 angles and
gain was set to × 1. The optical power of the laser was intensity diffraction patterns in total. Note that ref. 45 onlyKang et al. Light: Science & Applications (2021)10:74 Page 13 of 21
Object L3 L4
M2
EM-CCD
Δz
z Image
y plane
x
He–Ne laser
M1
A1 L2 F1 L1
Fig. 15 Optical apparatus used for experimental data acquisition45. L1-4: lenses, F1: pinhole, A1: aperture, EM-CCD: Electron-Multiplying Charge
Coupled Device. fL3 : fL4 ¼ 2 : 1. The object is along both x and y axes. The defocus distance between the conjugate plane to the exit object surface
and the EM-CCD is Δz = 58.2 mm
utilized 22 patterns out of with a 2-degree increment along Approximant sequences for training, validation, and testing
both x and y axes. The comparisons we show later are still are generated with these procedures and based on three-
fair because we retrained all the algorithms of ref. 45 for the dimensional simulated phantoms.
42 angles and 1° increment. However, under the strong scattering condition, the dense-
layered, binary-phase object is illuminated at a sequence of
Computational architecture angles, and the corresponding diffraction intensity patterns
Figure 16 shows the proposed RNN architectures for are captured by a detector. At the nth step of the sequence,
both scattering assumptions in detail. Details of the for- the object is illuminated by a plane wave at angles θnx ; θny
ward model and Approximant (pre-processing) algorithm, with respect to the propagation axis z on the xz and yz
the separable-convolution GRU, convolutional encoder planes, respectively. Beyond the object, the scattered field
and decoder, and the angular attention mechanism are propagates in free space by distance Δz to the digital camera
described in Materials and methods. The total number of (the numerical value is Δz = 58.2 mm. Let the forward
parameters in both computational architectures is ∼ 21 M model under the nth illumination angle be denoted as
(more on this topic in Training the recurrent neural Hn ; n ¼ 1; 2; ¼ ; N; that is, the nth measurement at the
network in Materials and methods.). detector plane produced by the phase object f is gn.
The forward operators Hn are obtained from the non-
Approximant computations paraxial BPM33,40,45, which is less usual so we describe it
Under the weak scattering condition, amplitude phan- in some additional detail here. Let the jth cross-section of
toms with the random number between 1 and 5 of the computational
window perpendicular to z-axis be
ellipsoids with arbitrarily chosen dimensions and ampli- f ½ j ¼ exp iφ½ j ; j ¼ 1; ¼ ; J; where J is the number of
tude values at random locations are illuminated within a slices the we divide the object into, each of axial extent δz.
limited-angle range along one axis, thus spatially isotropic The optical field at the (j + 1)th slice is expressed as
in average. The angle is scanned from −10° to +10° with a h h i qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi i
1° increment. Intensity patterns on a detector are simple ψ ½njþ1 ¼ F 1 F ψ ½j
n fn
½ j
kx ; ky exp i k k 2 kx2 ky2 δz
projections of the objects along certain angles according
ð1Þ
to the Radon transform as a forward model.
Filtered Backprojection (FBP)3 is chosen to perform where δz is is equal to the slab thickness, i.e. 0.5 mm;
backward operation. Here a crude estimate of n projections, F and F 1 are the Fourier and inverse Fourier transforms,
i.e. g 1 ; ¼ ; g n , using to the FBP algorithm without any respectively; and χ 1 χ 2 denotes the Hadamard (element-
regularization is the nth FBP Approximant or f 0n . Thus, the wise) product of the functions χ 1 and χ 2 :The Hadamard
quality of the FBP Approximant is improved as n increases. product is the numerical implementation of the thin
As n spans from 1 to N(=21), a sequence of the FBP transparency approximation, which is inherent in the BPM.
Approximants f 01 ; f 02 ; ¼ ; f 0N becomes the input to an To obtain the intensity at the detector, we define the (J + 1)
encoder and a recurrence cell as shown in Fig. 1b. The FBP th slice displaced by Δz from the Jth slice (the latter is the exitKang et al. Light: Science & Applications (2021)10:74 Page 14 of 21
a Angular axis b
Input (projections)
g1 ... gn ... gN Filtered Backprojection
RB1 (row, column, layer, angle, filter)
Input 32 × 32 × 1 × 21 × 1
DRB1
Encoder Filtered Backprojection 32 × 32 × 32 × 21 × 1
Filtered Filtered Filtered
DRB2 RB1 32 × 32 × 32 × 21 × 24
backprojection backprojection backprojection
DRB1 16 × 16 × 16 × 21 × 48
... ... DRB3
f1 fn fN DRB2 8 × 8 × 8 × 21 × 96
DRB3 4 × 4 × 4 × 21 × 192
Encoder Encoder Encoder SC-GRU SC-GRU 4 × 4 × 4 × 21 × 512
Angular attention 4 × 4 × 4 × 512
1 ... ...
n N Angular attention URB1 8 × 8 × 8 × 192
URB2 16 × 16 × 16 × 96
SC-GRU SC-GRU SC-GRU
URB1 URB3 32 × 32 × 32 × 48
h1 hn hN RB2 32 × 32 × 32 × 36
URB2
RB3 32 × 32 × 32 × 24
Angular attention mechanism RB4 32 × 32 × 32 × 1
URB3
a Decoder Output 32 × 32 × 32 × 1
RB2 (row, column, layer, filter)
Decoder
RB3
f RB4 (output)
c Angular axis d
Input (diffraction patterns)
g1 ... gn ... gN
Gradient descent
Dynamically Weighted Moving Average (DWMA)
Gradient Gradient Gradient DRB1 (row, column, layer, angle, filter)
descent descent descent Input 128 × 128 × 1 × 42 × 1
... ... DRB2
f 1[1] f n[1] f N[1] Encoder
Gradient descent 128 × 128 × 4 × 42 × 1
DWMA 128 × 128 × 4 × 12 × 1
DRB3
DRB1 64 × 64 × 4 × 12 × 24
Dynamically weighted moving average
DRB2 32 × 32 × 4 × 12 × 48
DRB4
DRB3 16 × 16 × 4 × 12 × 96
... ... [1]
f 1[1] f m[1] fM DRB4 8 × 8 × 4 × 12 × 192
SC-GRU
SC-GRU 8 × 8 × 4 × 12 × 512
Encoder Encoder Encoder
Angular attention 8 × 8 × 4 × 512
1 ... m ... M Angular attention URB1 16 × 16 × 4 × 192
URB2 32 × 32 × 4 × 96
SC-GRU SC-GRU SC-GRU URB1 URB3 64 × 64 × 4 × 48
URB4 128 × 128 × 4 × 36
h1 ... hm ... hM URB2
RB1 128 × 128 × 4 × 24
RB2 128 × 128 × 4 × 1
Angular attention mechanism URB3
Output 128 × 128 × 4 × 1
Decoder
a URB4 (row, column, layer, filter)
Decoder
RB1
RB2 (output)
f
Fig. 16 Details on implementing the dynamical scheme. Overall network architecture and tensorial dimensions of each layer for (a–b) weak
scattering and (c–d) strong scattering cases. (a) and (c) show unrolled versions of the architectures in (b) and (d), respectively. (a-b) Weak scattering
case: at nth step, n Radon projections g1 ; ¼ ; gn create an Approximant f ′n by a FBP operation, and a sequence of FBP Approximants f ′n ; n ¼
1; ¼ ; Nð¼ 21Þ; is followed by an encoder and a recurrent unit. There is an angular attention block before a decoder for the 3D reconstruction ^f ,
(c-d) Strong-scattering case: the raw intensity diffraction pattern gn ; n ¼ 1; ¼ ; N ð¼ 42Þ; of the nth angular sequence step is followed by gradient
½1
descent and the Dynamically Weighted Moving Average (DWMA) operations to construct another Approximant sequence ~f m ; m ¼ 1; ¼ ; M ð¼ 12Þ
from original Approximants f ½n1 .
TV regularization is applied to the gradient descent only for experimental diffraction patterns. The DWMA
½1
~
Approximants f m are encoded to ξm and fed to the recurrent dynamical operation whose output sequence hm ; m ¼ 1; ¼ ; 12, and the angular
attention mechanism them into a single representation a, which is finally decoded to produce the 3D reconstruction ^f . For both cases, training adapts
the weights of the learned operators in this architecture to minimize the training loss function E f ; ^f between ^f and the ground truth object fKang et al. Light: Science & Applications (2021)10:74 Page 15 of 21
surface of the object) to yield with reflexive boundary conditions79,80. To produce the
Approximants of experimentally obtained diffraction
2
Hn ðf Þ ¼ ψ ½nJþ1 ð2Þ patterns for testing from this functional, we first ran 4
iterations of the gradient descent and ran 8 iterations of
The purpose of the Approximant, in general, is to pro- the FGP-FISTA (Fast Gradient Projection with Fast
duce a crude estimate of the volumetric reconstruction Iterative Shrinkage Thresholding Algorithm)79,81.
using the forward operator alone. This has been well
established as a helpful form of pre-processing for sub- Dynamically weighted moving average
sequent treatment by machine learning algorithms45,78. The N Approximants of the strong scattering case
Previous works constructed the Approximant as a single- ½1 ½1 ½1
form a 4D spatiotemporal sequence f 1 ; f 2 ; ¼ ; f N ;
pass gradient descent algorithm33,45. Here, due to the
sequential nature of our reconstruction algorithm, as each which we process with a Dynamical Weighted Moving
intensity diffraction pattern from a new angle of illumina- Average (DWMA) operation. For the weak scattering
tion n is received, we instead construct a sequence of case, we omit this operation. The purpose of the
Approximants, indexed by n, by solving the problem DWMA is to smooth out short-term fluctuations, such
as experimental artifacts in raw intensity measure-
1 ments, and highlight longer-term trends, e.g. the
f^ ¼ argminf Ln ðf Þ where Ln ðf Þ ¼ kHn ðf Þ g n k22 ; change of information conveyed by different forward
2
n ¼ 1; 2; ¼ ; N operators along the angular axis. The resulting DWMA
½1
ð3Þ Approximants f~ have a shorter length M than the
m
original Approximants f n½1 , i.e. M < N. Also, the weights
The gradient descent update rule for this functional in the moving average are dynamically determined
Ln ðf Þ is as follows.
y 8
f ½nlþ1 ¼ f ½nl s ∇f Ln f ½nl ¼ f ½nl s HnT f ½nl ∇f Hn f ½nl > Pw
mþN
>
> αnm f n½1 ; 1 m Nh
<
g Tn ∇f Hn f ½nl Þy ð4Þ ½1
f~m ¼
n¼m
ð7Þ
>
> Pw
mþN
>
:
½1
αnm f nþNw ; Nh þ 1 m M
where f ½n0 ¼ 0 and s is the descent step size and in the n¼m
numerical calculations was set to 0.05 and the superscript †
denotes the transpose. The single-pass, gradient descent- ½1
where enm ¼ tanh Wem fn
based Approximant was used for training and testing of the
RNN with simulated diffraction patterns but with an
ðenm Þ
additional pre-processing step that will be explained in Eq. (7). αnm ¼ softmaxðenm Þ ¼ PNexp
w ;
n¼1
expðenm Þ
We also implemented a denoised TV-based Approximant,
n ¼ m; m þ 1; ¼ ; m þ Nw
to be used only at the testing stage of the RNN with
experimental diffraction patterns, where the additional pre-
processing step in Eq. (7) also applies. In this case, the Equation 7 follows the convention of an additive attention
functional to be minimized is mechanism74. αnm indicates relative importance of f n½1 with
½1
1 respect to f~ . Here, W m is a hidden layer assigned for
m e
2
LTV
n ðf Þ ¼ kHn ðf Þ g n k2 þ κTV l1 ðf Þ;
½1
2 ð5Þ each f~m , which is subject to be trained for several epochs.
n ¼ 1; 2; ¼ ; N The relative importance is determined by computing its
associated energy enm and the softmax function normalizes it.
where the TV-regularization parameter was chosen as More details are available in the Angular attention
κ ¼ 103 , and for x 2 RP ´ Q the anisotropic l1-TV mechanism in Materials and methods. Supplementary
operator is Information (SI) Section S3 explains why the DWMA is
X
P 1 X
Q1 more favorable than the Simple Moving Average (SMA) with
TVl1 ðxÞ ¼ xp;q xpþ1;q þ xp;q xp;qþ1 fixed and uniform weights, i.e. 1/M.
p¼1 q¼1 To be consistent, the DWMA was applied to the
ð6Þ
X
P1 X Q1 original Approximants for both training and testing. In
þ xp;Q xpþ1;Q þ xP;q xP;qþ1 this study, Nw = 15, Nh = 6, M = 12. These choices
p¼1 q¼1 follow from the following considerations. We haveKang et al. Light: Science & Applications (2021)10:74 Page 16 of 21
N = 42 diffraction patterns for each sequence: 21 The governing equations of the standard GRU are as
captured along the x-axis (1 – 21; θx ¼ 10 ; 9 follows:
circ; ¼ ; þ10 ) and the remaining ones along the y-axis
(22 – 42; θy ¼ 10 ; 9 ; ¼ ; þ10 ). The DWMA is rm ¼ σðWr ξ m þ Ur hm1 þ br Þ
first applied to 21 patterns from x-axis rotation, which zm ¼ σðWz ξ m þ Uz hm1 þ bz Þ
thus generates 6 averaged diffraction patterns, and ~m ¼ tanhðW ξ m þ U ðrm hm1 Þ þ bh Þ ð8Þ
h
then it is applied to the remaining 21 patterns from y- ~m þ zm hm1
axis rotation, resulting in the other 6 patterns. There- h m ¼ ð 1 zm Þ h
fore, the input sequence to the next step in the archi- where ξ m ; hm ; rm ; zm are the inputs, hidden features,
tecture of Fig. 16c, i.e. to the encoder (see reset states, and update states, respectively. Multiplication
Convolutional encoder and decoder in “Materials and operations with weight matrices are performed in a fully
methods” for details), consists of a sequence of M = 12 connected fashion.
½1
DWMA Approximants ~f m : In SI Section S4, we discuss We modified this architecture so as to take into account
performance change due to different ways of number- the asymmetry between the lateral and axial dimensions
½1
ing DWMA Approximants f~m entering the neural of optical field propagation, motivated from the concept
network. SI Section S5 provides visualization of of separable convolution in deep learning82,83 as shown in
DWMA Approximants. Fig. 17. This is evident even in free-space propagation,
where the lateral components of the Fresnel kernel
Separable-Convolution Gated Recurrent Unit (SC-GRU)
Recurrent neural networks involve a recurrent unit x2 þ y2
exp iπ ð9Þ
that retains memory and context based on previous λz
inputs in a form of latent tensors or hidden units. It is
well known that the LSTM is robust to instabilities in are shift invariant and, thus, convolutional, whereas the
the training process. Moreover, in the LSTM, the longitudinal axis z is not. The asymmetry is also evident in
weights applied to past inputs are updated according to nonlinear propagation, as in the BPM forward model
usefulness, while less useful past inputs are forgotten. Eq. (1) that we used here. This does not mean that space is
This encourages the most salient aspects of the input anisotropic – of course space is isotropic! The asymmetry
sequence to influence the output sequence56. Recently, arises because propagation and the object are 3D, whereas
the GRU was proposed as an alternative to LSTM. The the sensor is 2D. In other words, the orientation of the
GRU effectively reduces the number of parameters by image plane breaks the symmetry in object space so that
merging some operations inside the LSTM, without the scattered field from a certain voxel within the object
compromising the quality of reconstructions; thus, apparently influences the scattered intensity from its
it is expected to generalize better in many cases69. neighbors at the detector plane differently in the lateral
For this reason, we chose to utilize the GRU in this direction than in the axial direction. To account for this
paper as well. asymmetry in a profitable way for our learning task, we
z
x
y 1
3
1
4
Fig. 17 Separable-convolution scheme: different convolution kernels are applied along the lateral x, y axes vs. the longitudinal z-axis. In
our present implementation, the kernels’ respective dimensions are 3 × 3 × 1 (or 1 × 1 × 1) and 1 × 1 × 4. The lateral and longitudinal convolutions
are computed separately and the results are then added element-wise. The separable convolution scheme is used in both the gated recurrent unit
and the encoder/decoder (for more details, see Convolutional encoder and decoder in Materials and methods)You can also read