Can new mobile technologies enable fugitive methane reductions from the oil and gas industry?
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

LETTER • OPEN ACCESS
Can new mobile technologies enable fugitive methane reductions from
the oil and gas industry?
To cite this article: Thomas A Fox et al 2021 Environ. Res. Lett. 16 064077
View the article online for updates and enhancements.
This content was downloaded from IP address 46.4.80.155 on 13/09/2021 at 05:56
Environ. Res. Lett. 16 (2021) 064077 https://doi.org/10.1088/1748-9326/ac0565
LETTER
Can new mobile technologies enable fugitive methane reductions
OPEN ACCESS
from the oil and gas industry?
RECEIVED
29 January 2021
Thomas A Fox1,∗, Chris H Hugenholtz, Thomas E Barchyn, Tyler R Gough, Mozhou Gao
REVISED and Marshall Staples
14 May 2021
Centre for Smart Emissions Sensing Technologies, University of Calgary, Calgary, Alberta, Canada
ACCEPTED FOR PUBLICATION 1
26 May 2021 Present address Highwood Emissions Management thomas@highwoodemissions.com.
∗
Author to whom any correspondence should be addressed.
PUBLISHED
14 June 2021 E-mail: thomas.fox@ucalgary.ca
Keywords: fugitive methane, leak detection and repair, oil and gas, screening technology, LDAR-Sim
Original content from
this work may be used
under the terms of the
Creative Commons
Attribution 4.0 licence. Abstract
Any further distribution New mobile platforms such as vehicles, drones, aircraft, and satellites have emerged to help identify
of this work must
maintain attribution to
and reduce fugitive methane emissions from the oil and gas sector. When deployed as part of leak
the author(s) and the title detection and repair (LDAR) programs, most of these technologies use multi-visit LDAR (MVL),
of the work, journal
citation and DOI. which consists of four steps: (a) rapidly screen all facilities, (b) triage by emission rate, (c)
follow-up with close-range methods at the highest-emitting sites, and (d) conduct repairs. The
proposed value of MVL is to identify large leaks soon after they arise. Whether MVL offers an
improvement over traditional single-visit LDAR (SVL), which relies on undirected close-range
surveys, remains poorly understood. We use the Leak Detection and Repair Simulator (LDAR-Sim)
to examine the performance and cost-effectiveness of MVL relative to SVL. Results suggest that
facility-scale MVL programs can achieve fugitive emission reductions equivalent to SVL, but that
improved cost-effectiveness is not guaranteed. Under a best-case scenario, we find that screening
must cost < USD 100 per site for MVL to achieve 30% cost reductions relative to SVL. In scenarios
with non-target vented emissions and screening quantification uncertainty, triaging errors force
excessive close-range follow-up to achieve emissions reduction equivalence. The viability of MVL
as a cost-effective alternative to SVL for reducing fugitive methane emissions hinges on accurate
triaging after the screening phase.
1. Introduction new LDAR technologies and methods are emerging
(Fox et al 2019, Ravikumar et al 2019).
The oil and gas (O&G) industry is among the largest Emerging LDAR technologies differ markedly in
sources of anthropogenic methane, a potent green- measurement scale, deployment mode, and inform-
house gas. To reduce fugitive (defined here as unin- ation product, leading to a range of niche use cases
tentional loss of containment) methane emissions that are not yet well defined (Fox et al 2019a).
from O&G, regulators are increasingly mandating the Many new technologies consist of methane sensors
use of leak detection and repair (LDAR) programs deployed on mobile platforms: vehicles (Robertson
(US EPA 2016, AER 2018, ECCC 2018). In jurisdic- et al 2017, Caulton et al 2018), drones (Golston et al
tions without methane regulations, voluntary LDAR 2018, Barchyn et al 2019), aircraft (Englander et al
programs are common. Most LDAR programs rely on 2018, Schwietzke et al 2018), and satellites (Jacob
handheld organic vapour analyzers (OVAs) or optical et al 2016, Varon et al 2018). Data gathered by LDAR
gas imaging (OGI) cameras, which are functional, technologies can be used to attribute emissions to
familiar, and recommended by regulators (US EPA various scales, including regions, facilities, equip-
2016). Most OVA and OGI programs use single visit ment, or components. Ultimately, component-scale
LDAR (SVL), where all O&G facilities within a pro- detection is required for diagnosis and repair, but
gram scope are surveyed at a specified frequency. most emerging technologies measure at equipment
However, rapid innovation is underway, and diverse or facility scales. A new strategy called ‘screening’ has
© 2021 The Author(s). Published by IOP Publishing Ltd
Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
therefore emerged, which uses rapid mobile surveys is large (Ravikumar et al 2019). More accurate quan-
to identify a subset of the highest-emitting facilit- tification is often possible with longer surveys—but
ies in greatest need of LDAR (Fox et al 2019a). The longer surveys are more expensive. When triaging
motivation behind screening is to reduce the cost decisions are inaccurate because of vented emissions
of exhaustive SVL by rapidly targeting the highest and quantification error, the ranked list of facility-
emitters. Studies in Canada and the United States level emissions is inaccurate, and facilities with lower
have shown that most methane leaks are small, with fugitive emissions can get visited at the expense of
5% of sources accounting for approximately 50% of those with higher fugitive emissions. In the worst-case
emissions (Brandt et al 2016). The rationale behind scenario, follow-up inspectors could be sent to facil-
screening is that smaller leaks can be deprioritized or ities with no fugitive emissions, while facilities with
overlooked if large leaks can be found quickly. very large leaks are overlooked.
Screening must be combined with close-range The objective of this paper is to compare the emis-
follow-up inspections to diagnose and repair indi- sions reduction performance and cost-effectiveness
vidual leaks. We define multi-visit LDAR (MVL) pro- of emerging MVL programs and conventional SVL
grams as consisting of four steps: screening, triaging, programs. Using an agent-based modeling frame-
follow-up, and repair. First, rapid screening assesses work called LDAR-Sim, we generate a broad range
all facilities, detecting and often quantifying emis- of emissions equivalence scenarios (the conditions
sions. Second, triaging is a decision-making step that under which MVL and SVL achieve identical fugit-
uses the results from screening to determine which ive emission reductions), spanning different screen-
facilities should receive follow-up inspections. Most ing survey frequencies, follow-up requirements,
MVL programs consist of a single layer of screening, quantification errors, empirical leak-size distribu-
but screening and triaging can be repeated if multiple tions, and vented emissions. These equivalence scen-
methods of increasing precision are used (e.g. satellite arios are then used to explore the cost-effectiveness
then aircraft). Third, facilities that were flagged dur- of MVL under different conditions. We show
ing triaging are inspected at close-range to confirm that equivalent and cost-effective MVL programs
whether a leak exists and to identify repair require- require low-cost screening and provide target met-
ments. Fourth, if a leak exists and cannot be immedi- rics to help identify successful technologies and
ately repaired, an additional visit may be required. In programs.
general, the goal of MVL is to reduce time-consuming
and expensive SVL at every facility by combining 2. Methods
cheaper screening with targeted follow-up inspection
at a subset of screened facilities. Screening frequency Equivalence and cost-effectiveness of MVL are evalu-
in MVL should be higher than inspection frequencies ated using LDAR-Sim (Fox et al 2021). LDAR-Sim is
in SVL because (a) most screening methods are less an open-source modeling framework used to evalu-
sensitive than close-range methods, and (b) follow- ate and compare LDAR programs. In a virtual asset
up occurs at only a subset of facilities, while SVL pro- field, LDAR workers search for leaks at O&G facil-
grams are exhaustive. ities. LDAR workers apply technology modules that
Certain conditions are favourable for MVL. First, can detect leaks or quantify facility-scale emissions.
screening costs per facility should be lower than SVL The deployment of LDAR workers is managed under
because (a) screening is applied more frequently, and a program definition, which defines the number of
(b) after screening, follow-up surveys may still be workers and types of technology they are using. New
required. Second, leak-size distributions with heav- leaks and vented emissions appear stochastically in
ier tails (more small leaks, fewer large leaks) favour the asset field, drawn from empirical distributions.
MVL because the benefit of finding large leaks The model proceeds forward through time, tracking
increases. Third, deployment conditions and tech- the performance of different LDAR programs. Empir-
nology performance should enable accurate triaging. ical inputs describing specific deployment regions,
When ranking facilities by emission rate, quantifica- target facilities, monitoring technologies, work prac-
tion error and the presence of confounding sources tices, and regulations are required to operate the
may affect triaging. For example, vented emissions model. Outputs describe anticipated emissions mit-
(defined here as methane emissions that occur by igation and a cost analysis of the simulated program.
design, such as from pneumatic controllers or meth- To demonstrate equivalence, simulations can com-
ane slip during combustion) at upstream facilities pare different LDAR programs.
are not classified as leaks. Because vented emissions Generally speaking, three measurement scales are
are not candidates for repair, they are not targeted discussed in the context of LDAR in O&G: facil-
by LDAR programs. However, vented emissions are ity, equipment, and component. Facilities consist of
measured by facility-scale screening technologies and one or more pieces of equipment, and each piece
can confound the identification of fugitive emissions. of equipment can consist of dozens or hundreds of
Further, quantification error from screening methods individual components. Although leaks arise from
2Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
components, some methods only measure at equip- scenarios are important as regulators often approve
ment of facility scales. In LDAR-Sim, inspection alternative LDAR programs based on achieving emis-
agents can measure emissions at the component sions reduction equivalence with prescribed SVL pro-
scale, simulating handheld instruments like OGI, or grams. Alternative programs will not be approved if
at the facility scale, simulating screening methods. they do not achieve equivalence, but those respons-
In this study we assume that facility-scale screen- ible for conducting LDAR (e.g. O&G producers) want
ing methods are unable to discern fugitive and ven- to minimize costs and are unlikely to reduce emis-
ted emissions, which are aggregated into a single sions beyond what is required. Equivalence scenarios
measurement. Some screening methods can measure balance these opposing requirements. The concept of
emissions at intermediate scales, localizing sources to minimizing the cost of equivalence is also useful bey-
pieces of equipment (e.g. liquid tanks) or equipment ond a regulatory context, as operators with volun-
groups but not individual components (Ravikumar tary emissions reduction targets are likely to seek cost-
et al 2019). However, modeling at intermediate scales effective solutions.
is complex and we leave these analyses for future This study consists of identifying equivalence
work. scenarios and evaluating their cost-effectiveness.
In LDAR-Sim, an MVL workflow consists of the First, we run LDAR-Sim to estimate emissions under
following four steps: (a) screening agents estimate annual and triannual SVL programs that rely on OGI.
emission rates of each facility in the LDAR program; These SVL programs represent conventional regulat-
(b) a triaging procedure ranks all screened facilit- ory and voluntary LDAR programs. We then run
ies by emission rate and flags those that meet a ensembles of MVL simulations to identify equival-
follow-up threshold; (c) follow-up OGI agents visit ence scenarios for two leak size distributions, two
flagged facilities to identify individual leaks and tag follow-up threshold definitions, with and without
them for repair; (d) leaks are repaired, lowering emis- vented emissions, and with and without quantific-
sions. We use the following terminology: entire facil- ation error. We then evaluate the cost-effectiveness
ities are ‘flagged’ during screening and individual of equivalence scenarios for generic MVL programs.
leaks are ‘tagged’ for repair. Simulated screening All analysis code, empirical inputs, and output data
methods measure aggregate emissions, so a site with are available in the supplementary material and are
many small leaks might look the same as a site accompanied by a reproducibility guide.
with one large leak. Even a facility with no leaks
may be flagged for follow-up if vented emissions are 2.1. Triaging procedures
high, or if mistakes are made during ranking due to Triaging combines ranking facilities by emission rate
quantification error. However, follow-up surveys at and deciding which facilities to flag. Once facilit-
these mis-ranked flagged facilities can still result in ies have been ranked by emission rate, an expli-
tags of smaller leaks that contributed only a small cit rule must be used to distinguish between (a)
fraction to total site-level emissions. high-emitting facilities that are flagged for follow-up
The number and timing of follow-up inspec- inspections by close-range methods so that leaking
tions is important for determining fugitive emissions components can be tagged and queued for repair,
in LDAR programs. In MVL, emissions reductions and (b) low-emitting facilities that will not receive
are positively correlated with screening survey fre- close-range inspection and repair. Here, facilities are
quency and amount of follow-up. Additional screen- flagged if their estimated emission rate during screen-
ing surveys will find newly generated leaks faster, ing is above a threshold emission rate. We introduce
reducing the time that a large leak is left emit- two types of follow-up threshold: static and dynamic.
ting. More follow-up surveys will find more leaks. A static follow-up threshold is a constant value
For example, an LDAR program with 500 facilities derived from a baseline emissions distribution; it is
may have triannual screening and dispatch follow- the emission rate that corresponds with a desired tar-
up inspectors to the top 10% of emitters. Each get proportion of highest emitting facilities (static tar-
year, 1500 facility-scale screening inspections will get). Table S1 (available online at stacks.iop.org/ERL/
be performed, resulting in 150 flags and follow- 16/064077/mmedia) shows the static targets used in
up inspections. To double the number of follow- this study, the corresponding proportion of total
up inspections to 300, three options are available: emissions they represent in the distribution, and their
(a) double the number of screening surveys to static follow-up thresholds. For example, to target
3000, (b) double the percentage of facilities receiv- the top 2% of leaks, static thresholds of 0.34 and
ing follow-up to 20%, or (c) some combination of 0.54 g s−1 are required for empirical distributions A
(a) and (b). and B, respectively (inputs are described in the fol-
To better examine the economics of LDAR, we lowing section). Although we define static thresholds
vary screening frequencies and follow-up to isolate using a leak-size distribution, facility-scale fugitive
specific scenarios that achieve emissions reduction emissions measurements could also be used when
equivalence with SVL. These ‘equivalence scenarios’ available. The MVL methods modeled in this study
are used as the base of cost comparisons. Equivalence measure at the facility scale, which may aggregate
3Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
multiple leaks. Therefore, a static threshold of 2% surveys, as these are most representative of pre-
does not mean that 2% of facilities will receive follow- LDAR conditions. Compared to D1 , D2 is larger
up—far more than 2% of facilities will be flagged as (n = 969 vs. 281) and better matches distributions
there are often multiple leaks and vented emissions. seen elsewhere, where typically 5% of leaks rep-
We use facility-scale emissions as a starting proxy for resent 50% of emissions (table S1) (Brandt et al
facilities with anomalously high leak rates. Facilities 2016). D1 represents a highly skewed distribution in
are flagged if their summed emission rate exceeds the which 2% of sources account for ∼54% of emis-
follow-up threshold. sions. Only one company was surveyed in D2 , whereas
Dynamic thresholds depend on the relative emis- D1 represents 63 companies with broad geographical
sions among facilities at the time of screening. Dur- range.
ing a survey, a screening method visits each facil- Fugitive emissions are simulated under a range of
ity in a program, quantifies the emissions of each follow-up targets (listed in table S1). The same follow-
facility, ranks facilities according to emission rate, up targets are used to establish static and dynamic
and sends a follow-up crew to a specified propor- thresholds. All simulations are run on 500 randomly
tion of the highest-emitting facilities (e.g. top 10%). selected facilities in Alberta. Locations of facilities do
The dynamic target defines what proportion of the not matter to this simulation because weather and
highest emitters should be flagged for follow-up (e.g. travel distances are ignored to generalize the study,
0.1 for the top 10%). Note that the dynamic threshold but these parameters are important in applied situ-
that follows from the dynamic target is implicit and ations. Similarly, method-specific parameters (e.g.
does not need to be calculated. Compared to static detection limits, reporting and repair delays) and
thresholds, dynamic thresholds are conceptually sim- labour availability are not required to identify equi-
pler but may not be realistic for all screening meth- valence scenarios. For each static or dynamic target,
ods. An advantage of dynamic follow-up is that pro- ten simulations are run over six years (our analysis
gram cost should be relatively constant, as the same excludes year 1). Following previous studies, we use
number of facilities always receive follow-up. How- a daily leak production rate (LPR) of 0.0065 leaks per
ever, if aggregate program emissions are very high, site, but sensitivity to LPR is explored later (Kemp et al
dynamic thresholds are not guaranteed to meet mit- 2016, Fox et al 2021).
igation goals relative to a baseline. Similarly, if emis- Quantification is only required for technologies
sions are lower than expected, dynamic thresholds that use triaging—not close-range technologies used
may lead to unnecessary follow-up. A disadvantage to detect and diagnose individual leaks. In some
of dynamic thresholds is that all facilities in a group- treatments, vented emissions and screening quanti-
ing must be surveyed before follow-up decisions can fication errors are introduced. Vented emissions are
be made, whereas decisions can be made on-the-fly introduced following the methodology described pre-
when using static thresholds. viously (Fox et al 2021). Facility-scale quantifica-
tion error (E) remains poorly constrained for LDAR
2.2. Equivalence scenario modeling screening methods, and likely depends on the work
The parameters and empirical inputs used in this practice used, dispersion modeling approaches, and
study are based on an LDAR-Sim case-study demon- a range of method-specific environmental factors.
stration for Alberta, Canada (Fox et al 2021). Alberta For example, quantification uncertainties for ground
produces approximately 0.3 billion m3 of marketable vehicles are reported to range from 50% to 350%
natural gas and 0.5 million m3 of crude oil per day (Fox et al 2019a). More recently, blind controlled
from bituminous sands and a network of ∼176 000 release experiments found quantification estimates
conventional and unconventional oil and gas wells from mobile LDAR technologies to be within a factor
(AER ST37, AER ST98). As of January 2020, close- of two ∼35% of the time, and within an order or
range (component-scale) LDAR must be performed magnitude ∼82% of the time (Ravikumar et al 2019).
at tens of thousands of facilities up to three times per Rather than attempt to replicate E for any given
year using OGI cameras or OVAs (AER 2018, Johnson method, we present three hypothetical scenarios. In
and Tyner 2020). These new regulations are among E1 , facility-scale screening quantification has zero
the first globally that allow producers to develop and uncertainty. In E2 , an error term is drawn from a
implement ‘alternative’ LDAR programs, which can normal distribution with a mean of 0 and a stand-
consist of combinations of technologies and work ard deviation of 2.2, such that ∼35% of observations
practices that demonstrate equivalence (AER 2018). fall within ±1 of the true value (factor of two). In
We establish equivalence scenarios using two E3 , the error term is drawn from a normal distribu-
empirical leak-size distributions: (D1 ) the Clearstone tion with a mean of 0 and a standard deviation of 7.5,
Engineering dataset (as used in Fox et al 2021), such that ∼82% of observations fall within ±10 times
and (D2 ) recently published data from fieldwork the true value (order of magnitude). As the error term
in Alberta (Ravikumar et al 2020). Both distribu- departs from zero, it shifts the true emission rate (QT )
tions distinguish between fugitive and vented emis- away from the estimated rate (QE ). In E1 , the true rate
sions. In D2 , we use only leaks from initial LDAR equals the estimated rate, and all follow-up decisions
4Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
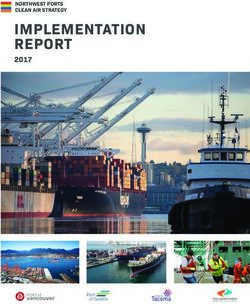
Figure 1. Ensemble of simulations across a range of dynamic follow-up targets and annual surveys (colours). As the dynamic
target increases, more facilities receive follow-up, more leaks are found, and fugitive emissions are lower. Increasing survey
frequency similarly results in lower fugitive emissions as infrequent large emissions are found and repaired sooner. Intersections
between SVL programs (black horizontal lines) and screening programs (colour lines) denote equivalence. For example, to be
equivalent with triannual OGI-based SVL, a screening program that screens all facilities nine times per year must send OGI
follow-up to the top 12% of highest-emitting facilities. Shaded regions are two standard deviations ensemble variability in
emissions rate. This example shows simulations under D1 , E1 , and without vented emissions (the most favourable situation for
screening technologies to be economically viable). Fugitive emission rates are averaged over five year simulations.
are optimal. In E2 and E3 , discrepancies between the the market. One way to estimate costs is to simulate
two rates reduce follow-up effectiveness as facilities typical screening programs in LDAR-Sim by platform
are mis-ranked. class. However, parameterization of these programs is
difficult, as little is known about daily costs, the num-
0, if E = E1
ber of facilities possible to screen per day, and general
E= Normal (0, 2.2) , if E = E2 . (1)
performance metrics of any specific solution.
Normal (0, 7.5) , if E = E3
Instead of forward simulating the cost of screen-
{
QT + QT · E, if E ⩾ 0 ing programs, we examine the amount of money that
QE = . (2) would be available for a screening technology within
QT / |E − 1| , if E < 0
a full program budget. This addresses the question
2.3. Cost-effectiveness modeling of ‘How much do screening programs need to cost
For each survey frequency, we extract optimum to result in savings relative to a single-visit OGI pro-
follow-up targets by linearly interpolating between gram?’ This inverse question is easier to answer as
the nearest programs above and below SVL pro- fewer assumptions about screening effectiveness are
gram emissions (figure 1). Equivalent MVL programs required.
should offer cost savings over SVL programs to be For any equivalence scenario, we know: (a) the
adopted by the O&G industry. However, estimating SVL survey frequency (FSVL ), (b) the dynamic tar-
the cost-effectiveness of screening programs is chal- get proportion (τ ), and (c) the screening survey fre-
lenging as the market is nascent and well-established quency (Fscreen ). If we assume that follow-up OGI
workflows have not been rigorously demonstrated. inspections are identical to OGI inspections under
Many companies exist, but each has a unique product SVL, the per-facility cost of OGI (COGI ) should
or service that combines a platform (e.g. aircraft, also be the same. Equivalent cost occurs when the
drone, satellite, vehicle), its sensors, and some work cost of OGI (left side of equation) equals those
practice. Costs are likely to change as these com- costs of both screening and follow-up (right side of
panies continue to develop and identify their role in equation):
5Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
FSVL · COGI · (1 − φ) = Fscreen · Cscreen + COGI · τ (3) diminishing returns in emissions reductions. Emis-
sions reduction equivalence occurs when simulated
where φ is the discount in MVL program costs emissions for an SVL program equal the emissions of
desired, relative to SVL. Solving for Cscreen , the money an MVL program. In theory, when the MVL and SVL
available for screening after accounting for the cost of programs have the same survey frequency, τ must
follow-up: equal 1 to achieve equivalence (i.e. all facilities will
receive follow-up and screening becomes redundant).
FSVL · COGI · (1 − φ) − COGI · τ Therefore, each screening survey frequency above
Cscreen = . (4)
Fscreen the SVL survey frequency will have a correspond-
ing τ required for equivalence. For example, if the
To simulate the risk and costs of new program devel- SVL program has triannual inspections at all facil-
opment, we use a discount requirement (φ). The ities, screening once or twice per year will not be
discount can be used to calculate Cscreen for MVL pro- equivalent, and screening three times per year will
grams that must be less expensive than a correspond- only be equivalent when 100% of screened facilities
ing SVL program. For example, if a producer requires receive follow-up (τ = 1). The only sensible equival-
the MVL program to be 30% cheaper than SVL to jus- ence scenarios occur when τ < 1, which requires a
tify the effort and risk of adoption, φ = 0.3 is used to higher screening survey frequency than the SVL pro-
calculate Cscreen . For cost equivalence, φ = 0. Aver- gram. As screening survey frequency increases, the
age OGI costs are generally between USD 250 and corresponding τ required for equivalence decreases.
450 per facility (EDF 2016). The Cscreen calculated The simplest definition of an equivalence scen-
here is conceptualized as the money available for per ario is a screening survey frequency and correspond-
facility screening, or a contract bid price that a pro- ing dynamic (τ ) or static target under a set of model-
ducer could offer to screening solution providers. If ing assumptions. All equivalence scenarios developed
a screening technology cannot perform screening at in this study are shown in figure 2. In panels A
this price, it is not cost effective. If a screening tech- and B, equivalence scenarios closer to the top-right
nology can perform the screening for less than Cscreen require more work (i.e. higher screening frequency
additional cost savings are available in the program. and follow-up) relative to those in the bottom left.
To illustrate Cscreen , consider an MVL program Achieving equivalence with a triannual SVL pro-
that applies screening two times per year with τ = 0.1 gram requires either more screening or more follow-
(i.e. the top 10% of emitting facilities are flagged up than achieving equivalence with annual SVL. A
and receive follow-up after each round of screen- similar pattern exists between programs with and
ing). To keep the scenario simple, we exclude con- without vented emissions. Here, screening techno-
founding aspects of vented emissions and quantific- logies are unable to differentiate fugitive from ven-
ation error. The SVL program consists of 500 facil- ted emissions, meaning that facility-scale emissions
ity surveys using OGI with a total cost between USD estimates include both. The fugitive emission signal
125 000 and 225 000. The MVL program would res- can therefore be lost in the noise of vented emissions,
ult in 1,000 facility screening surveys, with follow- which impacts facility ranking during triaging and
up OGI inspection at 100 facilities. The OGI follow- results in follow-up crews being sent to the wrong
up cost for 100 facilities is between USD 25000 and facilities—ones with high vented emissions but not
45000. The money available for screening, Cscreen , is necessarily high fugitive emissions. To achieve equi-
between USD 100 and 180/facility when φ = 0, or valence, the τ must increase to account for triaging
between USD 62.5 and 112.5/facility when φ = 0.3. errors, in some cases more than doubling the required
There are scenarios in which Cscreen can be negat- number of follow-up inspections.
ive (e.g. τ or φ approach 1); in these scenarios, the Triaging is also impacted by quantification error.
cost of follow-up surveys alone exceeds the cost of With no screening quantification error (E1 ), facil-
the SVL program. In other words, screening solu- ities can be correctly ranked according to emission
tion providers must work for free or pay to per- rate before follow-up inspectors are dispatched. As
form the service—a situation that is unlikely to quantification error increases to E2 and E3 , facilit-
occur. ies are ranked not according to their true emissions
rate (QT ), but according to the estimated rate (QE ),
3. Results and discussion effectively ‘shuffling’ the ranking. Whereas the impact
of vented emissions is relatively consistent for differ-
3.1. Equivalence scenarios ent survey frequencies, quantification error is more
Each MVL and SVL program results in a fugitive problematic for MVL programs with lower screening
emission rate averaged over a five year simulation. survey frequencies. This occurs because quantifica-
Figure 1 provides an example of how increasing either tion errors are a percentage of the true emission rate,
the number of screening surveys or the amount of whereas vented emissions are drawn from an empir-
follow-up (τ ) can lead to lower fugitive emissions. ical distribution and are assumed independent of the
Increasing either screening surveys or τ results in fugitive emissions at a facility. When screening survey
6Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
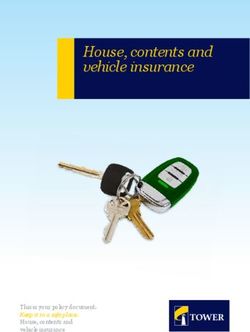
Figure 2. Catalogue of equivalence scenarios under various conditions: (A) dynamic targets assuming leak-rate distribution D1
(more skewed), (B) dynamic targets assuming leak-rate distribution D2 (less skewed), and (C) static targets assuming D1 . Each
point represents an equivalence scenario with either annual (orange) or triannual (blue) OGI-based SVL programs. In general,
more screening (either surveys or follow-up) is required to achieve equivalence with SVL programs that have higher survey
frequencies. Solid lines assume that all emissions are fugitives, while dashed lines assume the additional presence of vented
emissions. Quantification errors increase from E1 (perfect facility-scale quantification) to E3 (order or magnitude error) and are
explained in the main text. Note the different interpretations of dynamic targets (τ ; proportion of top-emitting facilities requiring
follow-up) and static targets (proportion of the fugitive leak-size distribution to target).
frequency is high, less time passes between surveys, requires a larger number of follow-up inspections to
which allows less time for leaks to accumulate. When achieve equivalence.
QT is close to zero, high quantification errors have less Figure 2(C) shows equivalence scenarios using
absolute impact on QE . Future work should investig- static targets, and must be interpreted differently
ate if QE should be estimated as a percentage of QT or from panels A and B. Both vented emissions and
as an absolute difference. quantification error result in lower required targets.
Comparing panels A and B in figure 2 illus- When vented emissions are added to fugitive emis-
trates the impact of leak-size distribution. Equival- sions at a facility, it makes it easier for the static
ence scenarios are achieved with less work for screen- threshold to be surpassed. However, this results in
ing programs under D1 , which is more heavily skewed much more work, which is not immediately evident
(figure 2(A)). When a smaller number of large leaks as a higher static target does not correspond intuit-
comprise the majority of total emissions, strategies ively with follow-up requirements like it does with a
that focus on these leaks benefit. Figure 2(B) shows dynamic target. Lower static targets are required to
equivalence scenarios under the D2 leak-rate distri- achieve equivalence as quantification error increases
bution, which is less heavy-tailed and consequently due to the heavy-tailed shape of the facility-scale
7Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
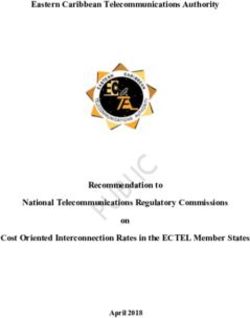
Figure 3. Maximum screening program costs (Cscreen ) under a range of equivalence scenarios. High Cscreen values indicate more
cost-effective MVL programs. Estimates are made assuming OGI survey costs of USD $250/facility (lower limit of each line) and
USD $450/facility (upper limit of each line). Blue lines show required screening costs when screening program target costs are
equal to those of the SVL program (φ = 0). Orange lines show required screening costs for screening programs that offer a 30%
cost reduction relative to the SVL program (φ = 0.3). The best-case scenario for MVL assumes perfect screening quantification
(E1 ), leak rates from D1 , and no vented emissions. The worst-case scenario assumes E3 , D2 , and presence of vented emissions.
Negative Cscreen values indicate that screening technology providers must pay to perform services, a situation unlikely to exist in
practice.
emissions distribution. More facilities will fall below best-case scenarios for MVL, which assume no vented
a given follow-up threshold than above, meaning that emissions, E1 , and D1 (extreme skew), Cscreen rarely
quantification error will push lower-emitting facil- exceeds USD 100/facility. To reduce costs relative to
ities above the threshold more often than higher- the SVL program by 30%, screening costs must not
emitting facilities below the threshold. This results in exceed USD ∼50–90/facility. The worst-case scenario
more work being done than necessary, leading to a is more realistic; it accounts for vented emissions,
lower static target. quantification error (E3 ), and assumes D2 , which bet-
Previous studies have shown the influence of LPR ter approximates emissions elsewhere (Brandt et al
on simulation results (Kemp et al 2016, Fox et al 2016). Every screening program under the worst-
2021). We present simulations under a range of LPRs case scenario is more expensive (i.e. negative val-
to determine whether results in this study are sensit- ues) than SVL before screening is paid for. In other
ive to LPR (figure S1). Fugitive emissions vary greatly words, triaging is so inefficient that, to achieve equi-
between programs, but because emissions increase for valence, more follow-up surveys must be conducted
both the SVL and MVL programs, equivalence scen- than would be required under the exhaustive but less
arios are robust to differences in LPR. frequent SVL program. To illustrate how Cscreen can
be negative, consider a hypothetical LDAR program
3.2. Cost-effectiveness with 100 facilities. An SVL program that requires
In figure 3, we estimate Cscreen for φ = 0 (blue) and annual OGI will require 100 inspections. A pro-
0.3 (orange) where COGI = USD 250/facility (lower posed MVL program with biannual surveys will have
limit) and USD 450/facility (upper limit). Under Cscreen = 0 if 50 follow-up surveys are required after
8Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
each survey (τ = 0.5), as the total number of follow- challenge for mobile LDAR methods that acquire only
up surveys (100) equals the number of required sur- a ‘snapshot’ of emissions (Alden et al 2020, Cardoso-
veys under the SVL program. Therefore, Cscreen for Saldaña et al 2020). Here, simulations account for
the biannual screening program can only be posit- temporal variability of vented emissions, but not of
ive when τ < 0.5. If screening quantification error fugitive emissions. If fugitive emissions are episodic,
reduces triaging effectiveness by introducing triaging then problems arise for MVL including (a) detect-
errors, τ may increase above 0.5, causing Cscreen to ing an episodic fugitive and dispatching a follow-
drop below zero. up inspector who is unable to identify the source,
In general, the screening programs simulated in and (b) failing to detect an episodic source that was
this study are more cost-effective when: (a) COGI is not emitting at the time of screening. For MVL to
higher; (b) equivalence scenarios with fewer screen- be effective, the facilities that receive follow-up must
ing surveys are used (i.e. those with higher τ and be the highest-emitting facilities over time and must
more follow-up); (c) vented emissions are lower; (d) be clearly distinguishable from low-emission facilit-
quantification error is low; and (e) leak-size distri- ies. Given that screening is a snapshot in time, the
butions are more skewed. Results also suggest that implicit assumption is that instantaneous emissions
more money is available for screening when SVL pro- are representative of the long-term average, which
gram requires more OGI surveys. This is likely due to may not be the case (Johnson et al 2019). Third,
the relative burden of going from one to two surveys follow-up OGI could be more expensive than OGI
being greater than the burden of going from three to used in SVL because flagged facilities may be spaced
four. further apart, which increases travel time and cost.
Our results suggest that MVL methods may Fourth, this study assumes that screening surveys are
struggle to be cost-effective compared to conven- spaced evenly apart throughout the year and that they
tional OGI-based SVL (figure 3). Vented emissions are not impacted by adverse environmental condi-
and quantification errors can lead to incorrect rank- tions, seasonal variability, or logistical constraints.
ing of facilities by emission rate, which increases the However, all screening methods have specific opera-
required number of follow-up inspections to achieve tional limitations that may further impact perform-
equivalence. Simulations suggest that MVL will be ance, such as clouds for satellites, roads for vehicle sys-
more cost-effective if triaging errors can be reduced. tems, snow for LiDAR, and wind and precipitation for
While negative Cscreen values are clearly unprofitable drones (Fox et al 2019a). Fifth, we assume that screen-
(screening providers would have to pay to provide ing technologies have minimum detection limits suf-
their service), it is difficult to infer profitability when ficient to accurately rank at least as many facilities as
screening must be USD 50–100 per site. Screening require follow-up. However, the most cost-effective
technologies are variable in approach as the industry scenarios require a small number of screening surveys
is nascent and is repurposing technologies used out- with considerable follow-up (τ up to 0.8 for triannual
side the O&G industry. For example, satellites are SVL equivalence). When τ is higher, the correspond-
expensive to build, launch, and operate, but are not ing minimum detection limit required by the screen-
constrained by access to services such as lodging for ing method is lower.
crews and road access. Vehicle-based systems are con- Despite these challenges, there may be oppor-
strained by driving time but are more scalable as hard- tunities for screening technologies. First, our results
ware and deployment are less expensive than satel- apply when fugitive emissions are the only target of
lites. These two examples are ends of a spectrum; reductions. New regulations and voluntary reduction
many variables affect the cost of screening surveys, initiatives by industry may use screening technolo-
which may be unprofitable in some contexts while gies not specifically for LDAR, but to understand total
profitable in others. facility-scale emissions. If so, vented emissions will go
The scenario with parameters least favourable for from being ‘noise’ to part of the ‘signal’ and will not
MVL viability (‘worst-case scenario’) considered in complicate triaging. Second, vented emissions may
this study may overly optimistic due to five model- decline significantly over the coming decades as reg-
ing assumptions. First, our analysis does not consider ulators and industry work towards mitigation tar-
the presence of false positive and false negative detec- gets. Clear steps can be taken to reduce vented emis-
tions for screening technologies, which could intro- sions, such as conversion from high- to low-bleed
duce additional triaging errors. False positive and pneumatics, installation of vapour recovery units on
false negative detections exist among screening meth- storage vessels, and best practices for well comple-
ods but are more common when the emission rate tions and manual liquid unloadings. These efforts
is close to zero (Ravikumar et al 2019). False negat- should increase the relative strength of the fugitive
ives are less likely to occur with the largest and most signal, assuming no change in leak production rates
consequential emission sources as detection probab- and LDAR, but may require more sensitive techno-
ility increases with emissions rate (Ravikumar et al logies to detect smaller emissions. Third, screening
2019). Second, new work is increasingly pointing to technologies in this study measure only at the facil-
temporal variability of methane emissions as a major ity scale. In reality, many screening technologies may
9Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
measure at the equipment scale, and the additional previous studies (e.g. Ravikumar et al 2019). While
granularity could possibly improve MVL. Fourth, we systematic bias should not impact the relative rank-
do not consider the cost of repair, as it is assumed that ing of facility emission rates, this topic warrants fur-
all leaks are eventually repaired, whether the result of ther study.
an LDAR program or by an operator. However, SVL More research is required to understand the ways
may lead to higher repair costs, especially as a larger in which mobile screening technologies might con-
number of smaller leaks are targeted. Fifth, our res- tribute to methane monitoring and mitigation. Con-
ults are sensitive to the skewness of leak-size distribu- siderable testing is underway to better understand
tions, with heavier tails favouring MVL. Production how a broad variety of different technologies might
regions, facility types, or other contexts that exhibit contribute to reducing methane emissions (Bell et al
extreme heavy tails may therefore benefit the most 2020, Zimmerle et al 2020). Better MVL perform-
from MVL. ance can result from stricter venting limits, improved
It may also be possible to reduce triaging errors sensors and quantification algorithms, and a better
with better ranking algorithms. The simple static understanding of how, where, and when to use MVL.
and dynamic thresholds used here are intuitive yet Close-range systems may also continue to evolve to
crude; more complex models may be developed have better performance than those considered in this
that incorporate facility-specific quantification errors study. It should be noted that this study only applies
and knowledge. For example, if estimated emissions to facility-scale MVL, and that additional analyses
exceed production, it may be possible to identify an are needed to evaluate equipment-scale screening,
error and require additional measurements. How- continuous monitoring, single-visit screening mod-
ever, complex follow-up schemes that are not codified els, and other approaches to alternative LDAR.
can be difficult to regulate. It is important to note that
these results are interpreted in the context of LDAR.
4. Conclusion
Another option is attempting to predict vented emis-
sions from equipment inventories and operator logs
This study used LDAR-Sim—an agent based numer-
to calibrate high-venting sites and improve ranking.
ical LDAR model—to explore scenarios involving
MVL technologies may also provide additional value
screening technologies. Our results suggest that (a)
beyond the immediate goal of mitigating fugitive
emissions-reduction equivalence is possible between
emissions. For example, facility-scale emissions data,
SVL and MVL programs, and (b) cost-effective equi-
even if inaccurate, may be desirable for producers
valence scenarios exist but may be difficult to achieve.
for reporting, tracking progress, or estimating prob-
Circumstances that impact performance also impact
ability of non-compliance with facility-scale venting
cost-effectiveness, as more surveys are required to
limits. Some screening technologies can also produce
achieve equivalence. We have shown that these cir-
ancillary data for facilities, such as mapping products
cumstances include vented emissions, quantification
from vehicles, drones, and aircraft. Screening can also
error, and the empirical leak-size distribution used
be performed passively if measurement systems are
for modeling.
deployed on existing vehicles.
Our simulations suggest the largest impediment
Reducing quantification error for screening tech-
to cost-effective MVL is the confounding presence
nologies may also improve MVL but is a major chal-
of vented emissions. Placing tight regulatory focus
lenge. Atmospheric variability is a significant source
on leaks only, instead of all methane emissions
of error (Caulton et al 2018). Accurate wind meas-
from a facility, may limit uptake of screening. The
urement is also critical in emissions modeling. Some
primary issue is scale—to find leaks on a facil-
mobile methods have reduced quantification error
ity with extensive vented emissions requires fine-
by increasing measurement times (Brantley et al
scale measurements, which favours SVL. In terms
2014) or by installing wind sensors on site. How-
of chemistry and environmental impact, vented and
ever, increased measurement times or requiring wind
fugitive methane at any one facility are usually
measurements at every site come with a cost pen-
identical. Facility-scale screening technologies could
alty. Additional work will be required to understand
be more effective if the fugitive-vented emissions
whether the trade-off between these factors and quan-
dichotomy was replaced with a more general focus on
tification error can be sufficiently reconciled to enable
identifying and resolving the highest-emitting facil-
cost-effective screening. Possible workarounds may
ities. However, this shift may hinge on improve-
exist. For example, low-sensitivity screening methods
ments in the quantification accuracy of screening
may opt for τ = 1, eliminating the need for triaging
technologies.
and thus avoiding incorrect ranking. However, min-
imum detection limits must be consistent for screen-
ing methods to ensure that all facilities emitting above Data availability statement
a specified amount receive follow-up. It should be
noted that this study did not consider systematic bias Supplementary information contains: (a) all model
in quantification errors, which have been observed in code, data inputs, and outputs; (b) a comprehensive
10Environ. Res. Lett. 16 (2021) 064077 T A Fox et al
reproducibility guide to enable transparent reproduc- Fox T A, Barchyn T E, Risk D, Ravikumar A P and
tion of study results; (c) a sensitivity analysis for leak Hugenholtz C H 2019a A review of close-range and
screening technologies for mitigating fugitive methane
production rate.
emissions in upstream oil and gas Environ. Res. Lett.
The data that support the findings of this study are 14 053002
openly available at the following URL/DOI: https:// Fox T A, Gao M, Barchyn T E, Jamin Y L and Hugenholtz C H
github.com/tarcadius/Fox_etal_2021_ERL. 2021 An agent-based model for estimating emissions
reduction equivalence among leak detection and repair
programs J. Clean. Prod. 282 125237
Acknowledgments Fox T A, Ravikumar A R, Hugenholtz C H, Zimmerle D,
Barchyn T E, Johnson M R, Lyon D and Taylor T 2019 A
methane emissions reduction equivalence framework for
We acknowledge Alberta Innovates for a Technology alternative leak detection and repair programs Elementa Sci.
Futures scholarship to TAF and NSERC for a Vanier Anthropocene 7 30
scholarship to TAF. Golston L M, Aubut N F, Frish M B, Yang S, Talbot R W,
Gretencord C, McSpiritt J and Zondlo M A 2018 Natural gas
fugitive leak detection using an unmanned aerial vehicle:
ORCID iD localization and quantification of emission rate Atmosphere
9 333
Thomas A Fox https://orcid.org/0000-0002-0066- Jacob D J, Turner A J, Maasakkers J D, Sheng J, Sun K, Liu X,
4048 Chance K, Aben I, McKeever J and Frankenberg C 2016
Satellite observations of atmospheric methane and their
value for quantifying methane emissions Atmos. Chem.
References Phys. 16 14371–96
Johnson D, Heltzel R and Oliver D 2019 Temporal variations in
AER 2018 Directive 060 upstream petroleum industry flaring, methane emissions from an unconventional well site ACS
incinerating, and venting (available at: https://static.aer.ca/ Omega 4 3708–15
prd/2020-10/Directive060.pdf) Johnson M R and Tyner D R 2020 A case study in competing
Alden C B, Wright R J, Coburn S C, Caputi D, Wendland G, methane regulations: will Canada’s and Alberta’s contrasting
Rybchuk A, Conley S, Faloona I and Rieker G B 2020 regulations achieve equivalent reductions? Elementa Sci.
Temporal variability of emissions revealed by continuous, Anthropocene 8 7
long-term monitoring of an underground natural gas Kemp C E, Ravikumar A P and Brandt A R 2016 Comparing
storage facility Environ. Sci. Technol. 54 14589–97 natural gas leakage detection technologies using an
Barchyn T E, Hugenholtz C H and Fox T A 2019 Plume detection open-source virtual gas field simulator Environ. Sci. Technol.
modeling of a drone-based natural gas leak detection system 50 4546–53
Elementa Sci. Anthropocene 7 41 Ravikumar A P, Roda-Stuart D, Liu R, Bradley A, Bergerson J,
Bell C S, Vaughn T, Zimmerle D, Helmig D and Lamb B 2020 Nie Y, Zhang S, Bi X and Brandt A R 2020 Repeated leak
Evaluation of next generation emission measurement detection and repair surveys reduce methane emissions over
technologies under repeatable test protocols Elementa Sci. scale of years Environ. Res. Lett. 15 034029
Anthropocene 8 32 Ravikumar A P, Sreedhara S, Wang J, Englander J, Roda-Stuart D,
Brandt A R, Heath G A and Cooley D 2016 Methane leaks from Bell C, Zimmerle D, Lyon D, Mogstad I and Ratner B 2019
natural gas systems follow extreme distributions Environ. Single-blind inter-comparison of methane detection
Sci. Technol. 50 12512–20 technologies–results from the stanford/EDF mobile
Brantley H L, Thoma E D, Squier W C, Guven B B and Lyon D monitoring challenge Elementa Sci. Anthropocene 7 37
2014 Assessment of methane emissions from oil and gas Robertson A M, Edie R, Snare D, Soltis J, Field R A,
production pads using mobile measurements Environ. Sci. Burkhart M D, Bell C S, Zimmerle D and Murphy S M 2017
Technol. 48 14508–15 Variation in methane emission rates from well pads in four
Cardoso-Saldaña F J and Allen D T 2020 Projecting the temporal oil and gas basins with contrasting production volumes and
evolution of methane emissions from oil and gas production compositions Environ. Sci. Technol. 51 8832–40
sites Environ. Sci. Technol. 54 14172–81 Schwietzke S, Harrison M, Lauderdale T, Branson K, Conley S and
Caulton D R et al 2018 Quantifying uncertainties from George F C 2018 Aerially-guided leak detection and repair: a
mobile-laboratory-derived emissions of well pads using pilot field study for evaluating the potential of methane
inverse Gaussian methods Atmos. Chem. Phys. 18 15145–68 emission detection and cost-effectiveness J. Air Waste
ECCC 2018 SOR/2018-66 regulations respecting reduction in the Manage. Assoc. 69 71–88
release of methane and certain volatile organic compounds USEPA 2016 Oil and natural gas sector: emission standards for
(upstream oil and gas sector) (available at: https://pollution- new, reconstructed, and modified sources (available at:
waste.canada.ca/environmental-protection-registry/ www.govinfo.gov/content/pkg/FR-2016-06-03/pdf/2016-
regulations/view?Id=146) 11971.pdf)
EDF 2016 Finding, fixing leaks is a cost-effective way to cut oil Varon D J, Jacob D J, McKeever J, Jervis D, Durak B O A, Xia Y
and gas methane emissions (available at: www.edf.org/sites/ and Huang Y 2018 Quantifying methane point sources from
default/files/content/ldar_fact_sheet_updated_ fine-scale satellite observations of atmospheric methane
with_citations.pdf) plumes Atmos. Meas. Tech. 11 5673–86
Englander J G, Brandt A R, Conley S, Lyon D R and Jackson R B Zimmerle D, Vaughn T, Bell C, Bennett K, Deshmukh P and
2018 Aerial interyear comparison and quantification of Thoma E 2020 Detection limits of optical gas imaging for
methane emissions persistence in the Bakken formation of natural gas leak detection in realistic controlled conditions
North Dakota, USA Environ. Sci. Technol. 52 8947–53 Environ. Sci. Technol. 54 11506–14
11You can also read