A Biomechanical Investigation of Athletic Footwear Traction Performance: Integration of Gait Analysis with Computational Simulation - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

applied
sciences
Article
A Biomechanical Investigation of Athletic Footwear
Traction Performance: Integration of Gait Analysis
with Computational Simulation
Kao-Shang Shih 1,2,† , Shu-Yu Jhou 3,† , Wei-Chun Hsu 4 , Ching-Chi Hsu 3, * , Jun-Wen Chen 4 ,
Jui-Chia Yeh 5 and Yi-Chun Hung 5
1 Department of Orthopedic Surgery, Shin Kong Wu Ho-Su Memorial Hospital, Taipei 111, Taiwan;
scorelin@gmail.com
2 School of Medicine, College of Medicine, Fu Jen Catholic University, New Taipei City 242, Taiwan
3 Graduate Institute of Applied Science and Technology, National Taiwan University of Science and
Technology, Taipei 106, Taiwan; D10622601@mail.ntust.edu.tw
4 Graduate Institute of Biomedical Engineering, National Taiwan University of Science and Technology,
Taipei 106, Taiwan; wchsu@mail.ntust.edu.tw (W.-C.H.); M10523102@gapps.ntust.edu.tw (J.-W.C.)
5 Footwear & Recreation Technology Research Institute, Taichung 407, Taiwan; 0811@bestmotion.com (J.-C.Y.);
0852@bestmotion.com (Y.-C.H.)
* Correspondence: hsucc@mail.ntust.edu.tw
† Both authors contributed equally to this work.
Received: 13 February 2020; Accepted: 26 February 2020; Published: 2 March 2020
Abstract: Evaluations are vital to quantify the functionalities of athletic footwear, such as the
performance of slip resistance, shock absorption, and rebound. Computational technology has
progressed to become a promising solution for accelerating product development time and providing
customized products in order to keep up with the competitive contemporary footwear market. In this
research, the effects of various tread pattern designs on traction performance in a normal gait were
analyzed by employing an approach that integrated computational simulation and gait analysis.
A state-of-the-art finite element (FE) model of a shoe was developed by digital sculpting technology.
A dynamic plantar pressure distribution was automatically applied to interpret individualized
subject conditions. The traction performance and real contact area between the shoe and the ground
during the gait could be characterized and predicted. The results suggest that the real contact area
and the structure of the outsole tread design influence the traction performance of the shoe in dry
conditions. This computational process is more efficient than mechanical tests in terms of both cost
and time, and it could bring a noticeable benefit to the footwear industry in the early design phases
of product development.
Keywords: traction; footwear; finite element analysis; plantar pressure; outsole tread pattern
1. Introduction
With the significant rise in exercising, the demand for athletic footwear products has grown
rapidly. To keep up, the footwear industry has been required to expand product range, accelerate
the product development time, and provide customized products. Performing an evaluation is vital
in product design, prototyping, biomechanics, and other areas in order to quantify the functions of
athletic footwear. These functions include traction, motion control, and the attenuation of impact
forces during a motion [1]. Focusing on footwear traction, a proper traction can effectively maximize
performance or minimize the risk of injury [2]. The traction is typically measured in terms of the
shoe–floor coefficient of friction by various slip testers [3–6]. However, the results of slip testing in
Appl. Sci. 2020, 10, 1672; doi:10.3390/app10051672 www.mdpi.com/journal/applsci
Appl. Sci. 2020, 10, 1672 2 of 13
predicting the coefficient of friction are inconsistent [7]. On the other hand, experimental tests are
time-consuming and expensive, and they cannot keep pace with the growing demand within the
footwear market. Developing a numerical simulation could reduce the number of design iterations
and improve design quality, and it promises a more efficient and less costly product development
process. Previous studies have developed a finite element (FE) model to predict the coefficient of
friction between the shoe and floor [8,9]. However, the shoe models had been simplified to a rear part
of the outsole. In a previous case study, the outsoles of military boots with five different tread patterns
were used to investigate how the tread patterns affect traction-force, which resists slip in a gaiting
direction [10]. However, the uniform vertical force of 200 N was applied as the only loading condition.
The dynamic simulation was conducted to predict the slip resistant performance by calculating the
reaction force [11]. However, the models were simplified to an outsole without complex curves.
Oversimplified or unaesthetic models and a lack of subject-specific loading conditions are the primary
disadvantages of previous numerical studies of footwear.
In the present study, digital sculpting technology was employed to create the complex curved
shapes of a shoe model. Plantar pressure measurement was performed to obtain the personal pressure
data. The non-linear FE method was used to simulate the traction performance under subject-specific
loading, which was defined by plantar pressure measurement. The mechanical tests were performed
to validate the results of the FE analysis. This study aimed to demonstrate an approach that integrated
digital sculpting technology and an FE method with gait analysis, and to evaluate the effect of a variety
of tread pattern designs on the traction performance during the gait.
2. Materials and Methods
2.1. Development of Shoe Geometry
In this research, we used Geomagic Freeform (3D Systems, Rock Hill, SC, USA), a digital sculpting
technology, to create the three-dimensional (3D) shoe model. Geomagic Freeform enables users to
easily create a model with complex curves, especially when compared to traditional computer-aided
design programs, which struggle to do so [12,13]. The file format conversion was needed before
transmitting the file of shoe model to the ANSYS Workbench 18.2 (ANSYS, Inc., Canonsburg, PA, USA).
The digital sculpting shoe model was converted by Geomagic Wrap (3D Systems, Rock Hill, SC, USA)
then imported in the ANSYS DesignModeler, one of the built-in geometric modelers in Workbench, to
accurately create and parametrically control the tread patterns (Figure 1A). The 3D shoe–ground model
consisted of elements including ground, outsole, midsole, insole, and upper (Figure 1B). Ten types of
outsole tread pattern design were divided into two groups, as shown in Figure 2. Two common outsole
tread designs, straight stripe and herringbone, were developed in “group one”. The height of the two
types of straight stripe design were 3 and 6 mm, respectively; the grooves between each tread were
both 3 mm (G1_S_Height-3 and G1_S_Height-6). The tread width of the two types of herringbone
design were 10 and 30 mm; the grooves between each tread, the tread height, and the tread angle were
3 mm, 3 mm, and 90◦ (G1_H_width-10 and G1_H_width-30), respectively. Two commercially available
tread pattern designs (G2_A and G2_B) and four original designs (G2_C, G2_D, G2_E, and G2_F) were
developed in “group two”. The difference between G2_E and G2_F was the height of the straight stripe
and the groove in the front part of the outsole.
Appl. Sci. 2020, 10, x FOR PEER REVIEW 3 of 12
Appl. Sci. 2020, 10, 1672 3 of 13
Appl. Sci. 2020, 10, x FOR PEER REVIEW 3 of 12
Figure 1. (A) The development process of the running shoe model; and (B), the anatomy of the 3D
Figure
shoe (A) The development process of the running shoe model; and (B), the anatomy of the 3D
1. ground
and
Figure 1. (A) Themodel.
development process of the running shoe model; and (B), the anatomy of the 3D
shoe and ground model.
shoe and ground model.
Figure 2. A 3D shoe model, and ten types of tread pattern design.
Figure 2. A 3D shoe model, and ten types of tread pattern design.
2.2. Plantar Pressure Measurements
Figure 2. A 3Dduring Gait and ten types of tread pattern design.
shoe model,
2.2. Plantar Pressure Measurements during Gait
To evaluate the traction performance in a physiological loading condition, plantar pressure was
2.2. Plantar
measured Pressure
To evaluate
during the Measurements
traction
a gait. during Gait
Dataperformance
of dynamic in a physiological
plantar pressure were loading condition,
recorded usingplantar pressure
an in-shoe pressurewas
measured
measurement during a gait. Data of dynamic plantar pressure were recorded using
To evaluate the traction performance in a physiological loading condition, plantar pressure and
system called the F-Scan Wireless System (Tekscan, Inc., South an
Boston, in-shoe
MA, pressure
USA), was
measurement
synchronized
measured during system called
witha force
gait. DatatheofF-Scan
plates (Kistler,
dynamicWireless
Inc., System
Winterthur,
plantar (Tekscan,
pressure Inc., South
Switzerland).
were recorded The Boston,
F-Scan
using MA, USA),
an Wireless
in-shoe System
pressureand
synchronized
consists
measurementof an with
in-shoe
system force plates
sensor
called the (Kistler,
and
F-Scan Inc.,for
software Winterthur,
Wireless data
System Switzerland).
analysis.
(Tekscan, In this The F-Scan
Inc.,study,
South the Wireless
sensing
Boston, MA,region System
USA), of
anda
consists
3000 of
Esport an in-shoe
in-shoe sensor
sensor and
was software
2.5 mm × for
2.5 data
mm analysis.
× 0.406 In
mm, this
and study,
the the sensing region
pressure-sensitive
synchronized with force plates (Kistler, Inc., Winterthur, Switzerland). The F-Scan Wireless System of
area aof3000
the
Esport
sensor in-shoe
was sensor
mm × 107
305in-shoe wasmm.2.5and
mm
The ×total
2.5 mm × 0.406
number mm, and
of analysis.
sensels wasthe pressure-sensitive
954 (resolution: area 2 ), sensor
of the
3.9 sensel/cm
consists of an sensor software for data In this study, the sensing region of with
a 3000a
was
75–125305 mm
psi × 107
pressure mm.
range.The total
The number
F-Scan of sensels
Wireless was
System 954
was (resolution:
attached to 3.9
one
Esport in-shoe sensor was 2.5 mm × 2.5 mm × 0.406 mm, and the pressure-sensitive area of the sensor sensel/cm
subject 2 ),
(male, with
aged a 75–
24,
125
58
waskgpsi
305 pressure
weight
mm and
× 107range.
166 cmThe
mm. F-Scan
height),
The Wireless
totalwho ofSystem
performed
number was
level
sensels attached
walking
was at to one subject
a naturally
954 (resolution: (male, aged
3.9self-selected
sensel/cm 2),pace24,across
with 58 kg
a 75–
weight
the
125 force and 166
psi pressure cm
plates (Figureheight), who
3). Three
range. The F-Scan performed
major level
phases
Wireless walking
of a right
System at a naturally
foot gait to
was attached cycle self-selected
onewere identified
subject pace across
and 24,
(male, aged selected:the
58 kg
weight and 166 cm height), who performed level walking at a naturally self-selected pace across the
Appl. Sci. 2020, 10, x FOR PEER REVIEW 4 of 12
Appl. Sci. 2020, 10, 1672 4 of 13
force plates (Figure 3). Three major phases of a right foot gait cycle were identified and selected:
loading response, mid-stance, and push-off. These phases were selected based on the ground reaction
loading response, mid-stance, and push-off. These phases were selected based on the ground reaction
force (GRF) profiles from the force plates and the foot contact area from the F-Scan Wireless System.
force (GRF) profiles from the force plates and the foot contact area from the F-Scan Wireless System.
The maximum GRF in the anteroposterior and mediolateral direction before the first peak was
The maximum GRF in the anteroposterior and mediolateral direction before the first peak was defined
defined as the loading response phase; the maximum foot contact area was defined as the mid-stance
as the loading response phase; the maximum foot contact area was defined as the mid-stance phase;
phase; and the second peak of the GRF was defined as the push-off phase. After the definition of the
and the second peak of the GRF was defined as the push-off phase. After the definition of the major
major phases, the dynamic plantar pressure charts of each were exported from the F-Scan System
phases, the dynamic plantar pressure charts of each were exported from the F-Scan System program.
program. According to the literature, the plantar pressure distribution charts could be divided into
According to the literature, the plantar pressure distribution charts could be divided into three regions:
three regions: forefoot, mid-foot, and rearfoot [14] (Figure 3). The loading conditions of the FE
forefoot, mid-foot, and rearfoot [14] (Figure 3). The loading conditions of the FE analysis were based
analysis were based on the pressure distribution charts.
on the pressure distribution charts.
Figure 3. Experimental setup for plantar pressure measurements during gait, and the exporting plantar
Figure 3. Experimental setup for plantar pressure measurements during gait, and the exporting
pressure distribution chart.
plantar pressure distribution chart.
2.3. Finite Element Model
2.3. Finite Element Model
After model preparation in the ANSYS DesignModeler, the ANSYS Workbench 18.2 static
After model preparation
structural module (ANSYS, Inc., in the ANSYS DesignModeler,
Canonsburg, PA, USA) was employedthe ANSYS to Workbench
simulate the18.2 static
footwear
structural module (ANSYS, Inc., Canonsburg, PA, USA) was employed
traction performance. Footwear is normally manufactured using very compressible rubber-like to simulate the footwear
traction
materialsperformance. Footwear
that can be modelled by aishyperelastic
normally manufactured
material model,using very compressible
and a strain-energy function rubber-like
is needed
materials that can be modelled by a hyperelastic material model, and
to describe their mechanical behavior [15–20]. In the current study, an Ogden foam second-ordera strain-energy function is
needed to describe their mechanical behavior [15–20]. In the current study,
material model was used for the footwear, and the values of the elastomeric Ogden foam parameters an Ogden foam second-
order material
are shown model
in Table wasThe
1 [21]. used for themodulus
Young’s footwear, of and the values
the ground was of the elastomeric
17,000 MPa, while the Ogden foam
Poisson’s
parameters are shown in Table 1 [21]. The Young’s modulus of the ground
ratio was 0.1 [21]. In terms of element types, the ground and the outsole were modelled with hex was 17,000 MPa, while
the Poisson’s
dominant ratio was
elements, 0.1 [21].
whereas theInupper,
terms insole,
of element
and types,
midsole the groundwere
sections and modelled
the outsolewithwere modelled
tetrahedron
with hex dominant
elements. elements,
The convergence whereas
analysis wasthe upper, insole,
conducted and midsole
by manually refiningsections
the mesh were
sizemodelled with
of the outsole
tetrahedron elements. The convergence analysis was conducted by manually refining
and the ground until the difference between the results of the reaction force and real contact area were the mesh size
of the
less outsole
than and the ground
the convergence until the
criterion, withdifference between
an allowance the results
of error of 0.5%.of the reaction
Through thisforce and real
convergence
contact area were less than the convergence criterion, with an allowance
process, the optimal mesh density was determined. The element size of upper, insole, and midsole of error of 0.5%. Through
this
wereconvergence
4 mm, whileprocess,
the outsolethe optimal
and ground mesh density
were was Each
1.7 mm. determined.
FE model The element approximately
contained size of upper,
insole,
858,074and midsole were
to 1,014,773 nodes,4 mm, while the
and 377,489 outsole elements.
to 465,000 and ground Thewere 1.7 mm.
frictional Each between
contact FE modelthe contained
relevant
approximately 858,074 to 1,014,773 nodes, and 377,489 to 465,000 elements.
surfaces of the outsole and the ground was applied by using CONTA 174 and TARGE 170 elements. The frictional contact
between
The contact elements with the default settings were used. The coefficient of friction was 0.6, and
the relevant surfaces of the outsole and the ground was applied by using CONTA 174 as a
TARGE 170 elements. The contact elements with the default settings were
static coefficient of friction of 0.5 was recommended by James Miller as the minimum slip-resistant used. The coefficient of
friction was 0.6, as a static coefficient of friction of 0.5 was recommended by
standard [22], and others have proposed an optimal coefficient of friction for various sports between 0.5James Miller as the
minimum slip-resistant standard [22], and others have proposed an optimal coefficient of friction for
Appl. Sci. 2020, 10, x FOR PEER REVIEW 5 of 12
Appl. Sci. 2020, 10, 1672 5 of 13
various sports between 0.5 and 0.7 [23]. The foot angles in three different positions were defined to
mimic level walking (Figure 4). The foot angle was set to 6°, as the average foot angle is between 5°
and
and 0.7
7° [23].
[24]. The
The foot angles
contact in three
angle different
between the positions
bottom ofwere
the defined
heel andtothe
mimic level was
ground walking (Figurethe
7° during 4).
The foot angle was set to 6 ◦ , as the average foot angle is between 5◦ and 7◦ [24]. The contact angle
loading response phase. The contact angle between the bottom of the shoe and the ground was 7°
between thepush-off
during the bottom of the heel
phase. Theand the ground
footwear was 7◦ during
was parallel theground
with the loadingduring
response
thephase. The contact
mid-stance phase
angle between the bottom of the shoe and the ground was 7 ◦ during the push-off phase. The footwear
(Figure 4).
was parallel with the ground during the mid-stance phase (Figure 4).
Table 1. The parameters of the Ogden foam material model used for footwear materials.
Table 1. The parameters of the Ogden foam material model used for footwear materials.
Material µ1 µ2 α1 α2 β1 β2
Material µ1 µ2
Upper 0.213 −0.06209α110.3 −3.349α2
0.32 0.32β1 β2
Upper Insole −0.06209
0.213 0.213 −0.06209 10.3 −3.349
10.3 −3.349 0.32 0.320.32 0.32
Insole 0.213 −0.06209 −3.349
Midsole 1.037 −0.3044 7.181 −2.348 0.32 0.320.32
10.3 0.32
Midsole 1.037 −0.3044 7.181 −2.348 0.32 0.32
Outsole Outsole 8.874
8.874 −7.827 −7.8272.028
2.028 1.345
1.3450.32 0.320.32 0.32
Figure 4. The position, boundary, and loading conditions of the finite element (FE) analysis three major
Figure 4. The position, boundary, and loading conditions of the finite element (FE) analysis three
phases of a gait cycle.
major phases of a gait cycle.
2.4. Simulation Condition and Data Output
2.4. Simulation Condition and Data Output
In this research, a total of thirty FE analyses were conducted using ten types of tread pattern design
with In thispositions:
three research,loading
a total response,
of thirty FE analyses and
mid-stance, werepush-off.
conductedTheusing tenanalysis
traction types ofwas tread pattern
performed
design with three positions: loading response, mid-stance, and push-off. The traction
by fully constraining both ends of the shoe throughout the simulation. The horizontal displacement analysis was
performed by fully constraining both ends of the shoe throughout the simulation.
was applied to the bottom surface of the ground to mimic the sliding behavior. The moving directions The horizontal
displacement
of the ground werewas applied to theon
defined based bottom surface of the
the international ground
standard ISOto13287
mimic theAll
[25]. sliding
of thebehavior.
data fromThethe
moving directions of the ground were defined based on the international standard
dynamic plantar pressure were applied as the loading conditions. We used the time-effective ANSYS ISO 13287 [25].
All of the data
Application from the dynamic
Customization Toolkitplantar
(ANSYS pressure
ACT), an were applied
add-on as the
module to loading conditions.
the Workbench We used
Environment
the time-effective
based on Python and ANSYS
XML, to Application Customization
create the automatic Toolkit
pressure (ANSYS
generator on theACT),
insolean(Figure
add-on 4).module to
In this FE
the Workbench Environment based on Python and XML, to create the automatic
analysis process, two steps were considered: loading application and ground movement. The dynamic pressure generator
on the insole
plantar (Figure
pressure 4). In this
was applied at FE
theanalysis
first step,process,
and thetwo steps wereofconsidered:
displacement the groundloading application
was applied at the
and ground movement. The dynamic plantar pressure was applied at the first
second step. In post-processing, the horizontal reaction force of the bottom surface of the ground was step, and the
Appl. Sci. 2020, 10, x FOR PEER REVIEW 6 of 12
displacement
Appl. Sci. 2020, 10, of
1672the
ground was applied at the second step. In post-processing, the horizontal6 of 13
reaction force of the bottom surface of the ground was calculated and considered as the friction force
to evaluate the traction performance [26]. A higher value reaction force indicated better traction
calculated and considered as the friction force to evaluate the traction performance [26]. A higher
performance. Additionally, the real contact area of the outsole was calculated to understand the
value reaction force indicated better traction performance. Additionally, the real contact area of the
contact area of the shoe after the loading application and ground movement.
outsole was calculated to understand the contact area of the shoe after the loading application and
ground movement.
2.5. Experiment for FE Model Validation
2.5. Experiment for FE Model
An experimental Validation
test was conducted to validate the feasibility and applicability of the numerical
simulation. Four types of tread design (straight stripe with 3 mm height, straight stripe with 6 mm
An experimental test was conducted to validate the feasibility and applicability of the numerical
height, herringbone with 3 mm height, and herringbone with 6 mm height) predicted by the FE
simulation. Four types of tread design (straight stripe with 3 mm height, straight stripe with 6 mm
method in group one were selected for the slip-resistance test. Before performing any tests, a
height, herringbone with 3 mm height, and herringbone with 6 mm height) predicted by the FE method
horizontal surface was needed on which to place the testing machine. The specimen was placed
in group one were selected for the slip-resistance test. Before performing any tests, a horizontal surface
parallel to both the floor with the dry condition and the test holder. Initially, the test was performed
was needed on which to place the testing machine. The specimen was placed parallel to both the floor
by leaving the rotating support in the vertical position and the weight was released using the trigger.
with the dry condition and the test holder. Initially, the test was performed by leaving the rotating
It was noted visually whether the specimen slipped when it contacted the floor surface. Without
support in the vertical position and the weight was released using the trigger. It was noted visually
moving the tester, the steps described above were repeated, increasing the angle of rotating support
whether the specimen slipped when it contacted the floor surface. Without moving the tester, the steps
until the slip just occurred. The corresponding value of the coefficient of friction was obtained and
described above were repeated, increasing the angle of rotating support until the slip just occurred.
recorded. The operational procedure was followed using a previous slip-resistance standard test
The corresponding value of the coefficient of friction was obtained and recorded. The operational
(ASTM F 1677 for Mark II) [27] (Figure 5). Each test was repeated three times, and the average
procedure was followed using a previous slip-resistance standard test (ASTM F 1677 for Mark II) [27]
coefficient of friction was reported. The experimental measurements of the coefficient of friction were
(Figure 5). Each test was repeated three times, and the average coefficient of friction was reported. The
compared to their FE results.
experimental measurements of the coefficient of friction were compared to their FE results.
Figure 5. The configuration of the experiment and the specimens.
Figure 5. The configuration of the experiment and the specimens.
2.6. Experimental–Computational Correlation
2.6. Experimental–Computational Correlation
The flowchart of the experimental–computational process is illustrated in Figure 6. The four types
Thedesign
of tread flowchart of the
(straight experimental–computational
stripe with 3 mm height, straightprocess is illustrated
stripe with in Figure
6 mm height, 6. The with
herringbone four
types of tread design (straight stripe with 3 mm height, straight stripe with 6 mm height,
3 mm height, and herringbone with 6 mm height) were first selected to compare their FE predicted herringbone
with 3 to
results mm theheight, and herringbone
experimental with positive
data. As strong 6 mm height) were between
correlations first selected
the FEtoprediction
compare their FE
and the
predicted results to the experimental data. As strong positive correlations between the
mechanical testing measurement were found, the traction simulations of new designs, group two, were FE prediction
and the
then mechanical testing measurement were found, the traction simulations of new designs, group
conducted.
two, were then conducted.
Appl. Sci.
Appl. Sci. 2020,
2020, 10,
10, 1672
x FOR PEER REVIEW 77 of
of 13
12
Appl. Sci. 2020, 10, x FOR PEER REVIEW 7 of 12
Figure 6. Flowchart of the experimental–computational process.
Figure
Figure 6. Flowchart of
6. Flowchart of the
the experimental–computational
experimental–computational process.
process.
3. Results
3. Results
3. Results
3.1. FE Model Validation
3.1.
3.1. FE Model Validation
The FE
The FEanalyses
analysesin inthis
thisresearch
researchwere wereconducted
conducted forfor the
the loading
loading response,
response, mid-stance,
mid-stance, andand push-
push-off
phases,The
off phases, FE
which analyses
which
representin this
represent research
the the entire
entire were
stance conducted
stance
phase phase for
of aofgaitthe
a gait loading
cycle.
cycle. response,
TheThe mid-stance,
experimental
experimental and push-
measurements
measurements of
off
the phases,
of the
coefficientwhich
coefficient represent
of friction
of friction the
for the entire
forfour stance
the testing
four phasespecimens
testing
specimens of awere
gait compared
cycle.
were The experimental
compared
to their to
FE their measurements
FE predicted
predicted reaction
of the group
reaction
force, coefficient
force, of
Thefriction
group
one. one. The
predictedforpredicted
the reaction
FE four FE
testing
forcesspecimens
reactioninforces
groupinonewere
group compared
were one tofound
wereto
found their to
FEreasonably
reasonably predicted
comply
reaction
comply
with force,
the with group one.
the experimental
experimental The
measurement predicted
measurement FE reaction forces
of the coefficient
of the coefficient in group one
of friction.
of friction. were found
Strong positive
Strong positive to reasonably
correlations
correlations existed
comply
between with
existed between the experimental
the reaction
the reaction force during measurement
force during
the entiretheofentire
the coefficient
stance stanceofphase
phase of gait
the friction.
of cycle Strong
the gait positive
cycle
in the thecorrelations
FEinanalysis
FE analysis
and the
existed
and thebetween
coefficient coefficienttheofreaction
of friction friction
in force during
testing:the
in mechanical
mechanical R 2entire
testing: Rstance
= 0.936 phase
2 = 0.936
at loading of the gait
at loading
response, Rcycle
response, in
R2the
2 = 0.920 FE analysis
=at0.920 at mid-
mid-stance,
and the
R =
stance,
and 2 coefficient
and of
R =at0.935
2
0.935 friction in
at push-off
push-off mechanical
(Figure(Figure
7). 7). testing: R 2 = 0.936 at loading response, R2 = 0.920 at mid-
stance, and R2 = 0.935 at push-off (Figure 7).
Figure
Figure 7. relationship between
7. The relationship between the FE predicted ground reaction force of group one and and the
the
Figure 7. The
experimentallyrelationship
measured between
coefficient the
of FE predicted
friction.
experimentally measured coefficient of friction. ground reaction force of group one and the
experimentally measured coefficient of friction.
3.2. Traction Performance Evaluation of Group One
3.2. Traction Performance Evaluation of Group One
Appl. Sci. 2020, 10, 1672 8 of 13
Appl. Sci. 2020, 10, x FOR PEER REVIEW 8 of 12
3.2. Traction Performance Evaluation of Group One
The reaction
The reaction force
force of of the
the four
four types
types of
of straight
straight stripe
stripe and
and herringbone
herringbone tread
tread pattern
pattern design
design in
in
group one is shown in Figure 7. It is observed that G1_S_Height-3 had the lowest
group one is shown in Figure 7. It is observed that G1_S_Height-3 had the lowest value reaction force value reaction force
during the
during theentire
entirestance
stance phase
phase of the
of the gait gait
cycle.cycle. The results
The results of the of the reaction
reaction force in force in thedirection
the moving moving
direction revealed slightly different trends between the loading response, mid-stance,
revealed slightly different trends between the loading response, mid-stance, and push-off phases. and push-off
phases.
The Thestripe
straight straight
tread stripe tread
pattern pattern (G1_S_Height-3
(G1_S_Height-3 and G1_S_Height-6)
and G1_S_Height-6) had areaction
had a lower value lower value
force
reaction force than that of the herringbone tread pattern (G1_S_Width-10
than that of the herringbone tread pattern (G1_S_Width-10 and G1_S_Width-30) during the entire and G1_S_Width-30)
duringphase
stance the entire
of thestance phaseexcept
gait cycle, of the gait cycle, except foratG1_S_Height-6
for G1_S_Height-6 at theThe
the push-off phase. push-off
higherphase.
heightThe
of
higher height
straight stripe of straight stripe (G1_S_Height-6)
(G1_S_Height-6) had a higher reaction had aforce
higher reaction
during force during
the entire the entire
stance phase stance
of the gait
phase In
cycle. of terms
the gait cycle.
of the In width
tread terms of the tread width
of herringbone, the of herringbone,
results show thatthe resultsvalue
a higher showofthat a higher
tread width
value of tread width had a higher reaction force at the
had a higher reaction force at the loading response and push-off phases.loading response and push-off phases.
3.3. Traction Performance Evaluation
Traction Performance Evaluation of
of Group
Group Two
Two
represents the
Figure 8 represents the reaction
reaction force
force of
of the
the two
two commercially
commercially available
available designs and the four
original designs in group two. The results of the reaction force in the moving direction revealed the
different trends
different trendsbetween
betweenthe theloading
loadingresponse,
response,mid-stance,
mid-stance, and
and push-off
push-off phases.
phases. TheThe reaction
reaction force
force of
of the
the commercially
commercially available
available design
design G2_A
G2_A was
was smallerthan
smaller thanthat
thatofofthe
theothers
othersin
inthe
theloading
loading response
push-off phases,
and push-off phases, and
and only
only slightly
slightly higher
higher than
than G2_C
G2_C inin the
the mid-stance
mid-stance phase.
phase. As compared with
the two commercially available designs, the reaction force of G2_B was greater than that of the G2_A
stance phase
during the entire stance phase of of the
the gait
gait cycle.
cycle. The four original designs showed similar results for
the reaction
reaction force
force at
at the
the loading
loading response
response phase.
phase. Distinct from the results at the the loading
loading response
response
phase, the
phase, the wide
wide straight
straight stripe and thin groove tread design in the front (G2_F) (G2_F) had a higher
higher value
value
reaction force
reaction force than
than that
that of
of the
the thin
thin straight stripe and wide groove
groove tread
tread design
design in the front
front (G2_E)
(G2_E) at
the push-off
push-off and
and mid-stance
mid-stance phases.
phases. As the tread width was increased, the reaction force could be
increased, and
increased, and this
this trend
trend can
can be
be found
found both
both in
in the
the mechanical
mechanicaltesttestand
andthetheFE
FEanalysis.
analysis.
Figure
Figure 8. The reaction
8. The reaction force
force chart
chart for
for group
group two.
two.
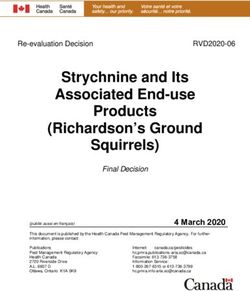
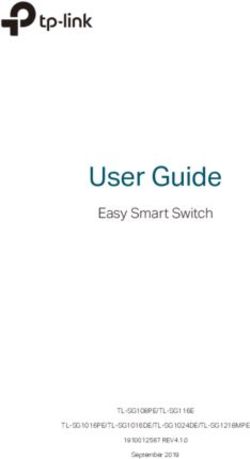
3.4. The Correlation between Contact Area and Traction Performance
The predictions for the real contact area where the outsole made contact with the ground surface
at push-off are presented in Figure 9. The results show the significant effect of tread pattern design
on the real contact area. Linear regression was used to establish the relationship between two
Appl. Sci. 2020, 10, 1672 9 of 13
3.4. The Correlation between Contact Area and Traction Performance
The predictions for the real contact area where the outsole made contact with the ground surface
at push-off are presented in Figure 9. The results show the significant effect of tread pattern design on
Appl. Sci. 2020, 10, x FOR PEER REVIEW 9 of 12
Appl.contact
the real Sci. 2020, area.
10, x FOR PEER REVIEW
Linear regression was used to establish the relationship between two 9variables, of 12
real contact
variables,area and
real reaction
contact areaforce. As shown
and reaction in the
force. linear regressions
As shown in the linear graphs (Figure
regressions 10),(Figure
graphs strong10),
positive
variables, real contact area and reaction force. As shown in the linear regressions graphs (Figure 10),
correlations were observed between the reaction force of the ground and the shoe–ground
strong positive correlations were observed between the reaction force of the ground and the shoe– real contact
strong positive correlations were observed between the reaction force of the ground and the shoe–
ground real
area during
ground real
contact area during
the entire
contactstance phase
area during
the
the
entire
ofentire stance
the gait phase
cycle
stance
of the
in the
phase
gait
FEgait
of the analysis:
cycle in R = FE
cycle in the
the
FE analysis:
0.84 R = 0.84
at loading
analysis:
at
response,
R = 0.84 at
R = 0.76
loading
at response, R and
mid-stance, = 0.76
R =
at mid-stance,
0.80 at and R Overall,
push-off. = 0.80 at push-off.
a higher Overall,
value ashoe–ground
of higher value ofreal
loading response, R = 0.76 at mid-stance, and R = 0.80 at push-off. Overall, a higher value of shoe–
shoe–contact
ground real contact
area could area could have a greater reaction force.
groundhave a greater
real contact reaction
area force.
could have a greater reaction force.
Figure 9. The predicted real contact area at push-off.
9. 9.The
Figure
Figure Thepredicted
predicted real contact
contactarea
areaatatpush-off.
push-off.
Figure TheThe
10. 10.
Figure relationship
relationshipbetween
between ground reactionforce
ground reaction force and
and real
real contact
contact area.area.
Figure 10. The relationship between ground reaction force and real contact area.
4. Discussion
4. Discussion
The influence of oversimplified models and the lack of actual circumstances have been
The influence of oversimplified models and the lack of actual circumstances have been
underestimated in recent experimental research and simulation analysis of footwear traction [10, 28–
underestimated in recent experimental research and simulation analysis of footwear traction [10, 28–
Appl. Sci. 2020, 10, 1672 10 of 13
4. Discussion
The influence of oversimplified models and the lack of actual circumstances have been
underestimated in recent experimental research and simulation analysis of footwear traction [10,28–32].
For example, a simplified outsole pad model could lead to an overly constrained boundary condition.
The lack of actual loading conditions and shoe position lead to the inability to mimic human weight,
pressure distribution, and foot angle in normal gait. To the best of our knowledge, the model
development and FE analysis setting process in this research could improve the feasibility and
applicability of traction performance simulation.
One of the most prominent features of this research was the automatic pressure application, which
could provide new insights for computational simulation. Instead of the built-in manual pressure
generator, the ANSYS ACT extension was used to create an automatic plantar pressure generator.
The manual pressure time settings were 4 h at the mid-stance phase, 2.5 h at the push-off phase, and 1 h
at the loading response phase. The automatic pressure application time was significantly reduced to
8 min at the mid-stance phase, 3 min at the push-off phase, and 50 s at the loading response phase. The
ANSYS ACT extension for the automatic plantar pressure generator is an efficient tool for mimicking
physiological loading conditions during the gait motion, and it is particularly advantageous to the
footwear industry, especially for customized products.
Trend differences have been found between the reaction force calculation during the entire stance
phase of the gait in the FE analysis and the coefficients of friction measurements in the experimental
test. The trend differences could be caused by the shoe position, sliding direction, or loading condition.
The experimental test only considered the condition that the specimen was parallel with the ground
and slid in one direction under a load of 4.5 kg. To mimic the human gait motion, the contact angle
between the bottom of the shoe and the ground was 7◦ at the loading response phase and 7◦ at the
push-off phase. The footwear was parallel with the ground at the mid-stance phase. The foot angle
was 6◦ at all three phases. In terms of the ground sliding direction, the horizontal displacement of the
ground was from toe to heel at the loading response phase, and was from heel to toe at the push-off and
mid-stance phases. Instead of a uniform loading of 4.5 kg, the data of the dynamic plantar pressure
were used in the FE analysis. Therefore, the FE results of reaction force had different trends from the
experimental test.
According to the classical Amontons–Coulomb friction law, the friction force is independent of
the apparent contact area [33]. However, this theory could only be correct at the macroscopic scale.
Previous research has proven that the real contact area between sliding surfaces plays a role in friction
at a microscopic scale, especially for an elastic material during sliding [34–36]. Some important aspects
may be gained from the graph of linear regressions shown in Figure 10. The higher value of the
shoe–ground real contact area could achieve a higher traction performance. Some of the results that
did not follow this observation perfectly could be caused by the geometry of the tread. When the
surfaces of ground and outsole tread push against one another, a shear force is needed to break the
adhesive bond of the contacting surfaces [37–39]. The geometry of the tread may have contributed to
the formation and strength of bonds, which could affect the results of the reaction force.
The potential limitations of this research should be noted. Firstly, for the surface condition, neither
contamination conditions nor the roughness of the surface of the ground were tested. A dry and
flat concrete ground was applied in the FE model. Secondly, the loading condition in the FE model
was based on a single-subject dynamic plantar pressure measurement, and was applied to the insole.
Thirdly, the coefficient of friction between the outsole and the ground was fixed at 0.6, and the traction
performance was evaluated by comparing the horizontal reaction forces of the ground. Fourthly,
the ground reaction forces in the medial–lateral and superior–inferior directions were ignored, as we
considered the magnitudes of the friction force and ground reaction force in the anterior–posterior
direction to be equal. The friction types of the current analysis only focus on static friction. Finally,
the simplified testing specimens based on ASTM F 1677 were manufactured and used in the presentAppl. Sci. 2020, 10, 1672 11 of 13
study. Further tests using the whole shoe specimens are needed to validate the numerical outcomes in
a future study.
5. Conclusions
Evaluation is essential to quantifying the function of traction performance. The findings of this
research suggest that the real contact area and the structure of the outsole tread design influence the
traction performance of the shoe in dry conditions. This computational process provides a lower cost
and more time-efficient method evaluating traction performance in an actual-person situation during a
gait motion. This research can be applied to product development in the early design phases in the
footwear industry to improve product performance or achieve the goals of customized products.
Author Contributions: Conceptualization, K.-S.S., W.-C.H. and C.-C.H.; Formal analysis, S.-Y.J., J.-W.C., J.-C.Y.
and Y.-C.H.; Funding acquisition, K.-S.S. and C.-C.H.; Investigation, K.-S.S., S.-Y.J., C.-C.H., J.-W.C., J.-C.Y. and
Y.-C.H.; Methodology, W.-C.H. and C.-C.H.; Validation, K.-S.S., W.-C.H. and C.-C.H.; Writing–original draft, S.-Y.J.
and C.-C.H.; Writing–review & editing, K.-S.S., W.-C.H. and C.-C.H. All authors have read and agreed to the
published version of the manuscript.
Funding: This study was financially supported by the Shin Kong Wu Ho-Su Memorial Hospital Research Program
under Grant No. SKH-8302-106-DR-12.
Acknowledgments: The authors would like to express their appreciation for the supports from the Footwear &
Recreation Technology Research Institute (FRT, Taiwan, R.O.C.).
Conflicts of Interest: The authors declare no conflict of interest.
References
1. McPoil, T.G. Athletic Footwear: Design, Performance and Selection Issues. J. Sci. Med. Sport 2000, 3, 260–267.
[CrossRef]
2. Gronqvist, R.; Chang, W.-R.; Courtney, T.K.; Leamon, T.B.; Redfern, M.S.; Strandberg, L. Measurement of
Slipperiness: Fundamental Concepts and Definitions. Ergonomics 2001, 44, 1102–1117. [CrossRef] [PubMed]
3. ASTM. Standard Test Method for Measuring the Coefficient of Friction for Evaluation of Slip Performance of Footwear
and Test Surfaces/Flooring Using a Whole Shoe Tester; ASTM International: West Conshohocken, PA, USA, 2011.
4. Hanson, J.P.; Redfern, M.S.; Mazumdar, M. Predicting Slips and Falls Considering Required and Available
Friction. Ergonomics 1999, 42, 1619–1633. [CrossRef] [PubMed]
5. Chang, W.-R.; Grönqvist, R.; Leclercq, S.; Brungraber, R.J.; Mattke, U.; Strandberg, L.; Thorpe, S.C.; Myung, R.;
Makkonen, L.; Courtney, T.K. The Role of Friction in the Measurement of Slipperiness, Part 2: Survey of
Friction Measurement Devices. Ergonomics 2001, 44, 1233–1261. [CrossRef] [PubMed]
6. Burnfield, J.M.; Powers, C.M. Prediction of Slips: An Evaluation of Utilized Coefficient of Friction and
Available Slip Resistance. Ergonomics 2006, 49, 982–995. [CrossRef]
7. Powers, C.M.; Brault, J.R.; Stefanou, M.A.; Tsai, Y.-J.; Flynn, J.; Siegmund, G.P. Assessment of Walkway
Tribometer Readings in Evaluating Slip Resistance: A Gait-Based Approach. J. Forensic Sci. 2007, 52, 400–405.
[CrossRef]
8. Moghaddam, S.R.M.; Acharya, A.; Redfern, M.S.; Beschorner, K.E. Predictive Multiscale Computational
Model of Shoe-Floor Coefficient of Friction. J. Biomech. 2018, 66, 145–152. [CrossRef]
9. Beschorner, K.E. Development of a Computational Model for Shoe-Floor Contaminant Friction. Mechanical
Engineering. Ph.D. Thesis, University of Illinois Urbana-Champaign, Champaign, IL, USA, 2004.
10. Sun, Z.; Howard, D.; Moatamedi, M. Finite Element Analysis of Footwear and Ground Interaction. Strain
2005, 113–117. [CrossRef]
11. Huang, Q.; Hu, M.; Xu, B.; Wu, J.; Zhou, J. Feasibility of Application of Finite Element Method in Shoe Slip
Resistance Test. Leather Footwear J. 2018, 18, 139–148. [CrossRef]
12. Kim, S.H.; Cho, J.R.; Choi, J.H.; Ryu, S.H.; Jeong, W.B. Coupled Foot-Shoe-Ground Interaction Model to
Assess Landing Impact Transfer Characteristics to Ground Condition. Interact. Multiscale Mech. 2012, 5,
75–90. [CrossRef]
13. Qiu, T.-X.; Teo, E.-C.; Yan, Y.-B.; Lei, W. Finite Element Modeling of a 3d Coupled Foot-Boot Model. Med.
Eng. Phys. 2011, 33, 1228–1233. [CrossRef] [PubMed]Appl. Sci. 2020, 10, 1672 12 of 13
14. Cavanagh, P.R.; Rodgers, M.M.; Liboshi, A. Pressure Distribution under Symptom-Free Feet During Barefoot
Standing. Foot Ankle 2016, 7, 262–278. [CrossRef] [PubMed]
15. Miehe, C.; Goktepe, S.; Lulei, F. A Micro-Macro Approach to Rubber-Like Materials? Part I: The Non-Affine
Micro-Sphere Model of Rubber Elasticity. J. Mech. Phys. Solids 2004, 52, 2617–2660. [CrossRef]
16. Verdejo, R.; Mills, N.J. Heel–Shoe Interactions and the Durability of Eva Foam Running-Shoe Midsoles. J.
Biomech. 2004, 37, 1379–1386. [CrossRef] [PubMed]
17. Goske, S.; Erdemir, A.; Petre, M.; Budhabhatti, S.; Cavanagh, P.R. Reduction of Plantar Heel Pressures: Insole
Design Using Finite Element Analysis. J. Biomech. 2006, 39, 2363–2370. [CrossRef] [PubMed]
18. Sissler, L.; Jacques, A.; Rao, G.; Berton, E.; Gueguen, N. A 3-D Finite Element Model of the Foot-Shoe
Structure During a Walking Cycle for Shoe Sole Design. Footwear Sci. 2013, 5, S36–S37. [CrossRef]
19. Benkahla, J.; Baranger, T.N.; Issartel, J. Experimental and Numerical Simulation of Elastomeric Outsole
Bending. Exp. Mech. 2012, 52, 1461–1473. [CrossRef]
20. Chen, W.M.; Lee, S.J.; Lee, V.S. Plantar Pressure Relief under the Metatarsal Heads—Therapeutic Insole
Design Using Three-Dimensional Finite Element Model of the Foot. J. Biomech. 2015, 48, 659–665. [CrossRef]
21. Cheung, T.M.; Zhang, M. Finite Element Modeling of the Human Foot and Footwear. In Proceedings of the
ABAQUS Users’ Conference, Boston, MA, USA, 23–25 May 2006.
22. Miller, J.M. “Slippery” Work Surface: Towards a Performance Definition and Quantitative Coefficient of
Friction Criteria. J. Saf. Res. 1983, 14, 145–158. [CrossRef]
23. Nigg, B.M.; Segesser, B. The Influence of Playing Surfaces on the Load on the Locomotor System and on
Football and Tennis Injuries. Sports Med. 1988, 5, 375–385. [CrossRef]
24. Menz, H.B.; Latt, M.D.; Tiedemann, A.; Mun San Kwan, M.; Lord, S.R. Reliability of the Gaitrite® Walkway
System for the Quantification of Temporo-Spatial Parameters of Gait in Young and Older People. Gait Posture
2004, 20, 20–25. [CrossRef]
25. ISO. Personal Protective Equipment-Footwear-Test Method for Slip Resistance; International Organization for
Standardization: Geneva, Switzerland, 2012.
26. Ali, A.S.; Badran, A.H.; Ali, W.Y. Friction Behavior of Epoxy Floor Tiles Filled by Carbon Nanoparticles. J.
Egypt. Soc. Tribol. 2018, 15, 1–10.
27. ASTM. Standard Test Method for Using a Portable Inclineable Articulated Strut Slip Tester (Plast); ASTM
International: West Conshohocken, PA, USA, 2005.
28. Li, K.W. Friction between Footwear and Floor Covered with Solid Particles under Dry and Wet Conditions.
Int. J. Occup. Saf. Ergon. 2014, 20, 43–53. [CrossRef] [PubMed]
29. Mohamed, M.K.; Samy, A.M.; Ali, W.Y. Friction Coefficient of Rubber Shoes Sliding against Ceramic Flooring.
KGK-Rubberpoint 2012, 65, 52–57.
30. Moghaddam, M.; Reza, S. Finite Element Analysis of Contribution of Adhesion and Hysteresis to Shoe-Floor.
Science in Engineering. Master Thesis, University of Wisconsin-Milwaukee, Milwaukee, WI, USA, 2013.
31. Shibataa, K.; Abe, S.; Yamaguchi, T.; Hokkirigwa, K. Evaluation for Slip Resistance of Floor Sheets and Shoe
Sole with Newly Developed Mobile Friction Measurement System. In Proceedings of the 19th Triennial
Congress of the IEA, Melbourne, Australia, 9–14 August 2015.
32. Li, K.W.; Chen, C.J. The Effect of Shoe Soling Tread Groove Width on the Coefficient of Friction with Different
Sole Materials, Floors, and Contaminants. Appl. Ergon. 2004, 35, 499–507. [CrossRef]
33. Popova, E.; Popov, V.L. The Research Works of Coulomb and Amontons and Generalized Laws of Friction.
Friction 2015, 3, 183–190. [CrossRef]
34. Etsion, I.; Kogut, L. A Static Friction Model for Elastic-Plastic Contacting Rough Surfaces. J. Tribol. 2004, 126,
34–40.
35. Krim, J. Resource Letter_Fmmls-1_Friction at Macroscopic and Microscopic Length Scales. Am. Assoc. Phys.
Teach. 2002, 70, 890–897.
36. Kanaga Karuppiah, K.S.; Bruck, A.L.; Sundararajan, S. Evaluation of Friction Behavior and Tts Contact-Area
Dependence at the Micro- and Nano-Scales. Tribol. Lett. 2009, 36, 259–267. [CrossRef]
37. Johnson, K.L.; Kendall, K.; Roberts, A.D. Surface Energy and the Contact of Elastic Solids. Proc. R. Soc. A.
Math. Phys. Eng. Sci. 1971, 324, 301–313.Appl. Sci. 2020, 10, 1672 13 of 13
38. Strandberg, L. The Effect of Conditions Underfoot on Falling and Overexertion Accidents. Ergonomics 1985,
28, 131–147. [CrossRef] [PubMed]
39. Chowdhury, S.K.; Ghosh, P. Adhesion and Adhesional Friction at the Contact between Solids. Wear 1994,
174, 9–19. [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).You can also read