Online Monitoring of Torpedo Car Shells Based on Equal Angle Scanning
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

applied
sciences
Article
Online Monitoring of Torpedo Car Shells Based on Equal
Angle Scanning
Yumei Tang * and Kefu Liu
School of Information Science and Technology, Fudan University, No. 220 Handan Road, Shanghai 200433, China;
kfliu@fudan.edu.cn
* Correspondence: 19110720076@fudan.edu.cn
Abstract: Infrared sensors are being applied more and more widely in industrial production appli-
cations. Based on the theory of thermal radiation, this paper discusses the system design principle,
temperature calibration method, and thermal image analysis method in detail. The system passed
the measurement unit certification, showing that the field of view is 180◦ , the number of scanning
points is 2048, the linear velocity is 10–100 Hz, the spatial resolution is 2.5 mrad, and the precision
is ±1 ◦ C. An online monitoring test of torpedo car was carried out in the steelmaking plant of Bao
Steel. The results show that the system has strong anti-interference ability, stability, and reliability,
and meets the application requirements of online monitoring.
Keywords: infrared sensors; calibration model; online monitoring; torpedo car
1. Introduction
The torpedo car is a very important large-scale molten iron transportation equipment
in the steel industry. It is a torpedo-type molten iron tank used in a large blast furnace.
Citation: Tang, Y.; Liu, K. Online It is also called a mixed iron car. It has good insulation conditions, small heat loss, and
Monitoring of Torpedo Car Shells
insulation time. Furthermore, it is energy saving and enduring. Because of the large
Based on Equal Angle Scanning. Appl.
volume of the car, it can also store molten iron to coordinate the temporary imbalance
Sci. 2021, 11, 8053. https://doi.org/
of ironmaking and steelmaking. At the same time, it can replace the steel-making mixer
10.3390/app11178053
and ordinary molten iron car to complete desulfurization, dephosphorization, and other
operations during the transportation of molten iron [1,2].
Academic Editor: Carosena Meola
The lining may crack, bulge, and spall due to chemical erosion, mechanical erosion,
Received: 17 July 2021
and rapid cooling and heating. Due to its high cost of maintenance, repair, and replacement,
Accepted: 25 August 2021
continuous monitoring and temperature detection are required to assess the lining of the
Published: 30 August 2021 torpedo car. When the refractory material is locally damaged severely but not found, it
will cause a serious accident [3,4].
Publisher’s Note: MDPI stays neutral
Infrared thermography (IRT) is a science dedicated to the acquisition and processing
with regard to jurisdictional claims in of thermal information from non-contact measurement devices [5]. It is an effective, fast,
published maps and institutional affil- and noncontact measurement technology that is especially suitable for measuring the
iations. temperature of moving objects [6–8]. To our knowledge, the traditional measurement
method is commonly used in the steel industry; that is, the relevant staff carry portable
infrared instruments to detect the quantity of torpedo cars on the transportation railway [9].
Not only is this method labor intensive, but also the measurement results are not stable,
Copyright: © 2021 by the authors.
especially in hot or rainy and snowy weather. In order to improve the efficiency of
Licensee MDPI, Basel, Switzerland.
monitoring and measurement stability, and effectively reduce the labor intensity of related
This article is an open access article operators, online infrared sensors are wanted for scanning and imaging [10,11].
distributed under the terms and In this work, based on equal angle scanning, a 3–5 µm infrared scanner is designed. A
conditions of the Creative Commons temperature calibration model is proposed and the panoramic thermal image of the torpedo
Attribution (CC BY) license (https:// car is obtained. Furthermore, an online monitoring analysis system for the temperature
creativecommons.org/licenses/by/ field of the torpedo car is developed. The inner lining thickness is simulated by thermal
4.0/).
Appl. Sci. 2021, 11, 8053. https://doi.org/10.3390/app11178053 https://www.mdpi.com/journal/applsci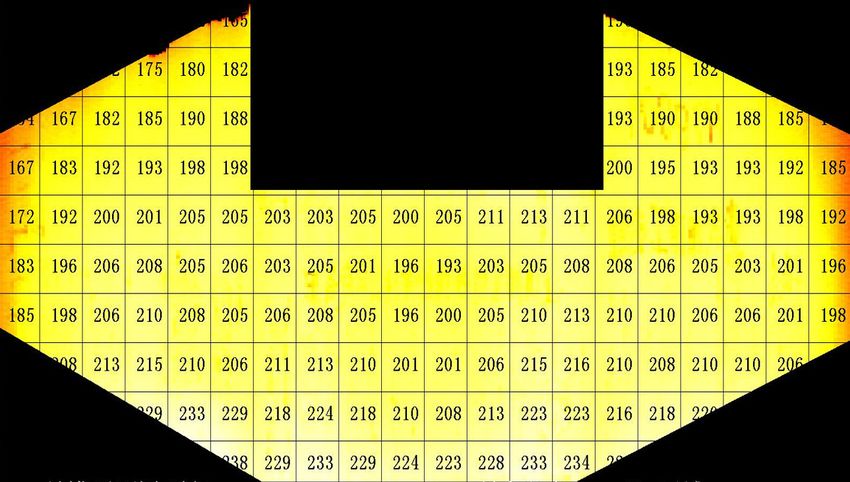
Appl. Sci. 2021, 11, 8053 2 of 9
map, and the temperature map is drawn according to the body shell size. Finally, the safety
alarm and accurate positioning are realized.
2. Theory and Method
2.1. Infrared Radiation Theory
According to Planck’s law of black body radiation [12], as long as the temperature
of any object in nature is higher than absolute zero (−273.15 ◦ C), it will emit energy in
the form of electromagnetic radiation in a very wide range of wavelengths, generating
electromagnetic waves (radiation energy). Different materials, different temperatures,
different surface brightness, different colors, etc., emit different infrared radiation intensity.
Planck’s radiation law gives the specific spectral distribution of blackbody radiation. At a
certain temperature, the energy radiated by a blackbody per unit area in unit time, unit
solid angle, and unit wavelength interval is:
2hc2 1
B(λ, T) = 5
· hc
(1)
λ exp( λKT ) − 1
−2 −1 −1
8 − 1
(W − m −Sr −µm )
B(λ, T)—Blackbody’s spectral radiance
c—Speed of light 2.998 ∗ 10 m·s
T—Absolute temperature of blackbody (K, T = t + 273)
−34
h—Planck constant 6.626 ∗ 10 J· s)
K—Boltzmann constant 1.380 ∗ 10−23 J·K−1
At a certain temperature, the spectral radiance of a black body has an extreme value,
and the position of this extreme value is related to the temperature. This is the Wien
displacement law (Wien) [13]:
λm × T = 2898(µm · K) (2)
λm —Wavelength at maximum blackbody spectral radiance
T—Absolute temperature of blackbody (K, T = t + 273)
The normal temperature range of the shell of the torpedo car is 100–500 ◦ C, so we
choose a medium-wave infrared detector (3–5 µm), probing to achieve the maximum
signal-to-noise ratio.
According to Planck’s Formula (1), we put forward the voltage response model of the
infrared detector (3):
A
U= B
−C (3)
exp( t+273.2 )−1
Here, t is the target radiation temperature, U is the voltage signal output by the
detector, and A, B, C are the correlation coefficients.
2.2. System Design
As is shown in Figure 1, we design a high-speed line scan infrared temperature mea-
surement system, which uses synchronous motor scanning and real-time image processing
to realize the reconstruction and visualization of the two-dimensional temperature field
of the moving target. It is composed of a refrigerated infrared temperature measurement
module and a DC brushless motor synchronous scanning module, high-speed signal ac-
quisition and processing module, computer real-time image splicing, and other technical
components. The infrared sensor mainly receives the radiant energy emitted by the mea-
sured object, focuses it on the detector through the receiving lens, completes the conversion
of the optical signal to the electrical signal, and then obtains the voltage value by low noise
amplifier, filtering, and analog-to-digital conversion.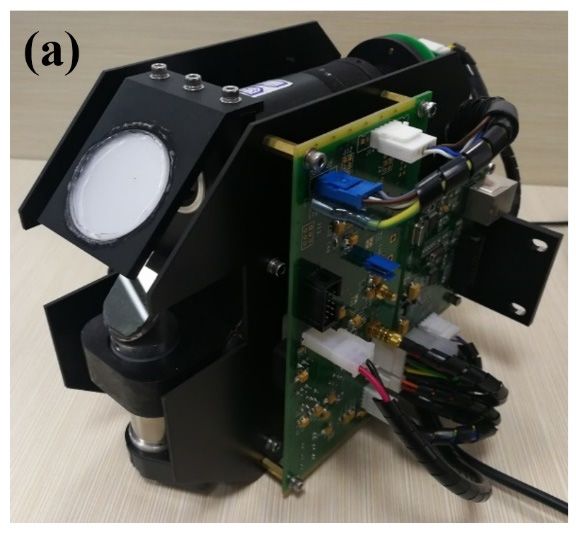
components. The infrared sensor mainly receives the radiant energy emitted by the meas-
Appl. Sci. 2021, 11, 8053
ured object, focuses it on the detector through the receiving lens, completes the conversion 3 of 9
SERVER
of the optical signal to the electrical signal, and then obtains the voltage value
TARGETby low noise
amplifier, filtering, and analog-to-digital conversion.
RTU
SERVER TARGET
Lens
TEC-MCT
(f=100mm)
RTU (d=0.25mm)
Mirror
Blackbody
SAR
TEC-MCT
ADC
Lens
Mirror
(f=100mm)
(d=0.25mm)
Mirror
RTU SAR
Blackbody
Motor Motor
TCP/IPADC FPGA
&PHY Driver
Mirror
Encoder
RTU Motor Motor
TCP/IP FPGA
&PHY Driver
Encoder
Figure 1. System block.
Figure 1.In
Figure 1.Figure
System 2, the SAR ADC sampling module obtains the voltage signal of the i
block.
System block.
detector [−5 V, +5 V] and converts it into absolute voltage in the range of [0–5].
In Figure
In Figure 2, the
2, the SARSAR ADC
ADC sampling
sampling module
module obtains
obtains thethe voltage
voltage signal
signal of the
of the infrared
infrared
detector [ − 5 V, +5 V] and V it+into
converts
detector [−5 V, +5 V] and converts 5 absolute voltage in the range of [0–5].
it into absolute voltage in the range of [0–5].
V = in
−V = adc _ data − V , Vin ∈ [ −5, + 5]
V Vo+ 5+ 5 2 ref ref
VVo o== in in − V−refVref
= adc _ data −−Vref
= adc_data Vref, Vin ∈∈
, Vin [ −[− + 5]
5, 5, +5] (4) (4)
22
where Vo is the digital output voltage, Vin is the AD sampling output voltage, and
where
where Vo V is the
isothe digital
digital output
output voltage,
VinVisinthe
is the
ADAD sampling output voltage,
andand
VrefVis
ref is
the reference voltage ofvoltage,
ADC. sampling output voltage,
thethe reference
reference voltage
voltage of ADC.
of ADC.
Figure 2. ADC
Figure sample
2. ADC based
sample on equal
based angle
on equal scanning.
angle scanning.
Figure 2. ADC sample based on equal angle scanning.
Figure
Figure3a 3a
is isthe
theproposed
proposed infrared scanner
scannerbased
basedonon equal
equal angle
angle scanning.
scanning. As isAs is
shown
shown in
in FigureFigure
Figure 3b,
3b, in in
3aorderis order to compensate
to compensate
the proposed for for the
the
infrared influence
influence ofbased
background
of background
scanner radiation,
onradiation,
equal wewe
angle carry
scanning
carry
out out real-time
real-time temperature
temperature correction
correction through
through background
background sampling.The
sampling. Thekey
keytechnical
tech-
shown in Figure 3b, in order to compensate for the influence of background radiat
nical index
index is listed
is listed in in Table
Table 1. 1.
carry out real-time temperature correction through background sampling. The ke
nical index
Table 1. is listed
Key technical in of
index Table 1. scanner.
infrared
Parameter Value
wavelength range 3–5 µm
FOV 180◦
focal length 100 mm
pixel number/line 2048
sampling rate 500 kSPS
scan speed 10–100 Hz
precision ±1 ◦ C
spatial resolution 2.5 mrad
Appl. Sci. 2021, 11, 8053 4 of 9
Appl. Sci. 2021, 11, x FOR PEER REVIEW 4 of 9
(b) START
(cnt_409610
cnt_4096=14'd1600
Vref_temp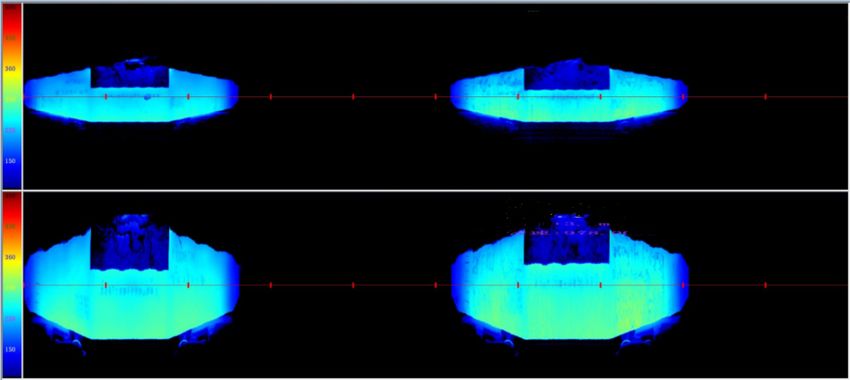
330 2.1
340 2.3
350 2.5
380 3.25
Appl. Sci. 2021, 11, 8053 400 3.8 5 of 9
450 5.45
According to Formula (3), we can obtain the temperature inversion Formula (5) of
According tomeasurement
the temperature Formula (3), we can obtain the temperature inversion Formula (5) of the
system:
temperature measurement system:
B
t= BA − 273.2
t = log(A − 273.2 (5)
(5)
log( U+ + 1)
UC++C1)
As
As is
is shown
shown in
in Figure
Figure4,
4, we
we use
use the
the Matlab
Matlab R2016a
R2016acurve
curvefitting
fittingtool
toolto
toperform
performcurve
curve
fitting
fitting on
on Formula (3), and
and obtain
obtainthe
thecorrelation
correlationcoefficients:
coefficients:AA= 631.2,
= 631.2,
B =B3444,
= 3444,
andand
C=
C = 0.002758.
0.002758.
Figure4.
Figure 4. Curve
Curve fitting
fitting of
oftemperature
temperaturevoltage
voltageresponse
responsemodel.
model.
The
The ADC(AD7321, ADI) ADI) input rangeisis±5±V,
inputrange 5 V,
thethe full-scale
full-scale range
range is 10isV10with
V with
8192
8192 codes,
codes, andLSB
and the the size
LSB is
size is mV.
1.22 1.22 mV.
Here,
Here,wewedefine
defineK(t)
K(t)as
asdt/dU Temperature of resolution is ∆T
dt/dU = K(t). Temperature ∆T == K(t) ∗∗ LSB..
Table 3 is the temperature resolution in different ranges.
Table 3 is the temperature resolution in different ranges.
Table3.3.Temperature
Table Temperatureresolution
resolutioninindifferent
differenttemperature
temperatureranges.
ranges.
t/°C t/◦ C U/V U/V dt/dU dt/dU Resolution/◦ C
Resolution/°C
100 0.06 646.02 0.8
100 0.06 646.02 0.8
200 200 0.42 0.42 152.38 152.38 0.2 0.2
300 300 1.55 1.55 61.25 61.25 0.07 0.07
400 400 3.8 3.8 34.37 34.37 0.04 0.04
3. Experiments
3. Experiments
As isisshown
As shownininFigure
Figure 5, the
5, the mainmain equipment
equipment at monitoring
at the the monitoring site includes
site includes two
two scan-
scanners (in the red dashed line ellipse in Figure 5); four RFID antennas
ners (in the red dashed line ellipse in Figure 5); four RFID antennas (in the yellow dashed (in the yellow
dashed
line circlelinein circle
Figurein3);
Figure 3); andtags
and RFID RFID tags installed
installed on the torpedo
on the torpedo car (eachcartorpedo
(each torpedo
car is
car is equipped
equipped withRFID
with four four RFID tags,tags
tags, two two both
tags both
on theonfront
the front and back
and back sides).
sides). The The sys-
system
tem collects, calculates, and transmits temperature data on the shell surface,
collects, calculates, and transmits temperature data on the shell surface, and transmits and transmits
itit to
to the
thecentral
centralcontrol
controlroom
roomthrough
throughan anoptical
opticalfiber
fibernetwork.
network.The
Thesoftware
softwareadopts
adoptsthe
the
B/S(Browser/Server) architecture. The main equipment in the central control room is
the temperature data server and the large-screen display platform in the console. The
large-screen display platform is used for real-time display, and the temperature data server
can be used for offline data analysis.
Appl. Sci. 2021, 11, x FOR PEER REVIEW 6 of 9
B/S(Browser/Server) architecture. The main equipment in the central control room is the
Appl. Sci. 2021, 11, 8053 temperature data server and the large-screen display platform in the console. The large-
6 of 9
screen display platform is used for real-time display, and the temperature data server can
be used for offline data analysis.
Appl. Sci. 2021, 11, x FOR PEER REVIEW 6 of 9
B/S(Browser/Server) architecture. The main equipment in the central control room is the
temperature data server and the large-screen display platform in the console. The large-
screen display platform is used for real-time display, and the temperature data server can
be used for offline data analysis.
Figure 5.
Figure 5. Online
Online monitoring
monitoring application.
application.
4.
4.5.Results
Figure and
and Discussion
Online monitoring
Results application.
Discussion
4.1. Real Time Analysis of
4.1. Real
4. Results Time Analysis
and Discussion of Heat
Heat Map
Map
As
4.1. Real Time is
is shown
AsAnalysis
shown in
of Heat Figure
Figure 6a,
inMap 6a, the
the length
length of
of the
the torpedo
torpedo car
car is
is 14.5
14.5 m,
m, the
the speed
speed of
of the
the
torpedo
As is shown
torpedo car
carinwith
Figuretwo
with tanks
6a, the
two isisabout
length
tanks of 88km/h
the torpedo
about km/h car(normally 6–10
is 14.5 m, the
(normally km/h),
speed
6–10 of the and
km/h), and scanning
scanning time
time is
is
about
torpedo 6.6 s.
car with two As is shown
tanks is about is Figure
8 km/h 6b, if 6–10
(normally the km/h),
line speed is 20 ms,
and scanning timethe
is image resolution is
about
aboutno 6.6less
6.6
s. Asthan
s. As
is shown
is shown is Figure 6b, if the line speed is 20 ms, the image resolution is no
330isline.
FigureIf 6b,
theifline
the line speedisisset
speed 20 ms,
as 10thems,
image resolution
the image isresolution
no is no less than
less330
less than than
line.330 line.
If the lineIf the isline
speed speed
set as 10 ms,isthe
setimage
as 10resolution
ms, theisimage
no less resolution
than 660 is no less than 660
660 line.
line. line.
Appl. Sci. 2021, 11, x FOR PEER REVIEW 7 of 9
(a)
(a)
(b)
Figure 6. (a) Mechanical
Figure 6. diagram of 320 t torpedo
(a) Mechanical car, (b)
diagram of thermal imaging. car,
320 t torpedo (b) thermal imaging.
As is shown in Figure 7, we use the pseudo-color to describe the surface temperature
field distribution on the two sides of the torpedo car. By comparing the temperature cor-
responding to the color scale on the left, the temperature and relative height of each sur-
face position can be visually distinguished from the figure. Through the temperature in-
formation fed back from the graph, it is analyzed and inferred whether the torpedo tank
body lining is damaged, whether there is sediment at the bottom, etc., as well as the spe-
cific geometric dimensions and precise physical location on the surface of the torpedo carAppl. Sci. 2021, 11, 8053 7 of 9
(b)
Figure 6. (a) Mechanical diagram of 320 t torpedo car, (b) thermal imaging.
As isAsshown
is shownin Figure 7, we
in Figure 7, use the pseudo-color
we use the pseudo-color to describe the surface
to describe temperature
the surface temperature
fieldfield
distribution on the two sides of the torpedo car. By comparing
distribution on the two sides of the torpedo car. By comparing the temperature cor- the temperature
corresponding
responding to to the
the color
color scale
scale on
on the
the left, the temperature
left, the temperature and and relative
relative height
height ofofeach
eachsur-
surface position can be visually distinguished from the figure. Through
face position can be visually distinguished from the figure. Through the temperature in- the temperature
information
formation fed back
fed backfrom
fromthethe
graph,
graph,it isitanalyzed
is analyzed andand
inferred whether
inferred whetherthe the
torpedo tanktank
torpedo
body lining
body is damaged,
lining is damaged,whether therethere
whether is sediment at the at
is sediment bottom, etc., asetc.,
the bottom, wellasaswell
the specific
as the spe-
geometric dimensions and precise physical location on the surface of
cific geometric dimensions and precise physical location on the surface of the torpedothe torpedo car when car
the above
when the above situation occurs. Based on the heat transfer model and boundary[14],
situation occurs. Based on the heat transfer model and boundary conditions condi-
we perform
tions [14], linear mapping,
we perform which
linear can simulate
mapping, which thecan
radial temperature
simulate distribution
the radial temperature of the
distri-
car shell,
butionproviding
of the car ashell,
basisproviding
for the design
a basisoffor refractory
the design linings and the linings
of refractory establishment
and the of
estab-
accurate heatof
lishment transfer
accurate models.
heat transfer models.
(a) Thermal imaging on the two sides (b) axial temperature profile.
Figure
Figure 7. Thermal
7. Thermal imaging
imaging and and
axialaxial temperature
temperature profile.
profile.
4.2. 4.2. Statistical
Statistical Analysis
Analysis of Heat
of Heat MapMap
Appl. Sci. 2021, 11, x FOR PEER REVIEW As isAs is shown
shown in Figure
in Figure 8, image
8, image reconstruction
reconstruction and unitand unit segmentation
segmentation (20 ×8 10
of 9ele-
(20 × 10 elements)
ments) are based
are performed performed
on thebased
axialon the axial temperature
temperature data and thedata and the
physical physical
model of themodel
shell. of the
shell.
Figure8.
Figure 8. Image
Image reconstruction
reconstructionof
oftorpedo
torpedocar.
car.
Each
Each unit
unit is
is preset
preset to
toaalimit
limitvalue
valueof 350◦°C.
of350 C. Whenever
Wheneveraatemperature
temperaturevalue
valuehigher
higher
than
than this
this preset
presetvalue
valueisisread,
read,the
thesystem
systemoutputs
outputsthe
thehigh-temperature
high-temperaturealarm
alarmstatus,
status,and
and
displays
displays the
the temperature
temperature value
value table
table of
of each
each unit
unit on
onthe
themonitor
monitorscreen,
screen,and
andinforms
informsthethe
operator
operator ofof aa“high
“hightemperature”
temperature”alarm
alarmby byvoice.
voice.
5. Conclusions
Based on the theory of thermal radiation, this paper discusses the system design prin-
ciple, temperature calibration method, and thermal image analysis method in detail. The
system has passed the measurement unit certification, showing that the field of view is
180°, the number of scanning points is 2048, the linear velocity is 10–100 Hz, the spatial
resolution is 2.5 mrad, and the precision is ±1 °C.Appl. Sci. 2021, 11, 8053 8 of 9
5. Conclusions
Based on the theory of thermal radiation, this paper discusses the system design
principle, temperature calibration method, and thermal image analysis method in detail.
The system has passed the measurement unit certification, showing that the field of view is
180◦ , the number of scanning points is 2048, the linear velocity is 10–100 Hz, the spatial
resolution is 2.5 mrad, and the precision is ±1 ◦ C.
The temperature of the torpedo car shell is 100–500 degrees Celsius. Low-cost area
array thermal imaging cameras mainly use uncooled long-wave infrared technology
(8–14 microns). There are phenomena such as large temperature measurement errors
in high-temperature sections, inaccurate data, and poor environmental adaptability [15,16].
According to Wien’s law, to accurately measure the temperature, the mid-wave infrared
imaging technology can obtain the best performance.
The cooling medium-wave infrared scanning temperature measurement system can
cool the detector thermoelectricity and compensate for the temperature, which can output
data steadily day and night; the unique large field of view (0–180 degrees) is especially
suitable for online detection of moving objects. In order to adapt to rain, snow, fog, and
other weather, the installation distance should not be too far. In addition, it can simulate
the lining thickness and locate the fault accurately, to assist in the analysis and infer the
damage trend of the inner lining, and then help determine when the torpedo car is repaired,
which not only greatly reduces the manpower and material costs, but also reduces the
number of spare torpedo cars.
Author Contributions: Conceptualization, methodology, software, validation, formal analysis, in-
vestigation, resources, data curation, writing—original draft preparation, Y.T.; writing—review and
editing, visualization, supervision, project administration, K.L. All authors have read and agreed to
the published version of the manuscript.
Funding: This research was funded by Hefei GoodTech, Co., Ltd.
Institutional Review Board Statement: Not applicable.
Informed Consent Statement: Not applicable.
Conflicts of Interest: The authors declare no conflict of interest.
References
1. Zhao, J.Y.; Zang, Y.; Qin, Q.; Wu, D.P. Thermo-Mechanical Analysis of Torpedo Car. Appl. Mech. Mater. 2011, 44–47, 1198–1202.
[CrossRef]
2. Yemelyanov, V.; Tochilkina, T.; Vasilieva, E.; Nedelkin, A.; Shved, E. Computer Diagnostics of the Torpedo Ladle Cars. In
International Conference on Inventive Material Science Applications; Bindhu, V., Wang, H.H., Ranganathan, G., Eds.; Amer Inst
Physics: Melville, NY, USA, 2018.
3. Jin, S.L.; Harmuth, H.; Gruber, D.; Buhr, A.; Sinnema, S.; Rebouillat, L. Thermomechanical Modelling of a Torpedo Car by
Considering Working Lining Spalling. Ironmak. Steelmak. 2020, 47, 145–149. [CrossRef]
4. Goldwaser, A.; Schutt, A. Optimal Torpedo Scheduling. J. Artif. Intell. Res. 2018, 63, 955–986. [CrossRef]
5. Usamentiaga, R.; Venegas, P.; Guerediaga, J.; Vega, L.; Molleda, J.; Bulnes, F.G. Infrared Thermography for Temperature
Measurement and Non-Destructive Testing. Sensors 2014, 14, 12305–12348. [CrossRef]
6. Dai, S.; Nie, H.; Yi, W.; Yang, Y.; Li, J.; Li, D. Research on a New Method of Multi-Zone High Temperature Point Tracking of
Rotary Kiln Surface Temperature Based on Equal Angle Scanning. Infrared Phys. Technol. 2019, 103, 103078. [CrossRef]
7. Gade, R.; Moeslund, T.B. Thermal Cameras and Applications: A Survey. Mach. Vis. Appl. 2014, 25, 245–262. [CrossRef]
8. Hodgkinson, J.; Tatam, R.P. Optical Gas Sensing: A Review. Meas. Sci. Technol. 2012, 24, 012004. [CrossRef]
9. Botelho, R.A.; Calente, A. Online Monitoring of Torpedo Car Shells. In Proceedings of the Spie the International Society for
Optical Engineering, Aerospace/Defense Sensing, Simulation, and Controls, Orlando, FL, USA, 23 March 2001.
10. Jiang, Z.; Guo, Y.; Pan, D.; Gui, W.; Maldague, X. Polymorphic Measurement Method of Feo Content of Sinter Based on
Heterogeneous Features of Infrared Thermal Images. IEEE Sens. J. 2021, 21, 12036–12047.
11. Holst, G.C.; Driggers, R.; Furxhi, O. Design Considerations for Advanced Mwir Target Acquisition Systems. Appl. Opt. 2020, 59,
4339–4348. [CrossRef]
12. Bose, S.N. Planck’s Law and Light Quantum Hypothesis. Z. Phys. 1924, 26, 178–181.
13. Saurel, P. On Wien’s Displacement Law. Phys. Rev. 1910, 30, 356–358. [CrossRef]Appl. Sci. 2021, 11, 8053 9 of 9
14. Liu, Y.; Xing, Y.; Yang, C.; Li, C.; Xue, C. Simulation of Heat Transfer in the Progress of Precision Glass Molding with a Finite
Element Method for Chalcogenide Glass. Appl. Opt. 2019, 58, 7311–7318. [CrossRef] [PubMed]
15. Findlay, G.A.; Cutten, D.R. Comparison of Performance of 3–5-and 8–12-µm Infrared Systems. Appl. Opt. 1989, 28, 5029–5037.
[CrossRef] [PubMed]
16. Meitzler, T.; Gerhart, G.; Sohn, E.; Collins, P. Comparison of the Performance of 3–5 and 8–12 Micron Infrared Cameras; SPIE: Bellingham,
UK, 1994.You can also read

















































